靜電驅動下振梁微陀螺儀的性能分析
2020-08-13 07:29:41李偉楊曉東張偉
振動工程學報 2020年4期
李偉 楊曉東 張偉

摘要: 研究了一種末端帶有檢測質量塊的單軸靜電懸臂梁式微陀螺儀。檢測質量塊受到兩個固定電極的耦合作用,這兩個電極均連接直流電壓以使質量塊產生較大的靜態變形。在驅動方向上的電極還受到交流電壓的作用,驅動質量塊產生主振動。當有旋轉發生時,在垂直于主振動的敏感方向上質量塊會受到科氏力而產生1個二次振動,通過測得二次振動的幅值大小便可以測得角速度。首先,依據Hamilton原理建立了振梁微陀螺儀的控制方程,研究了旋轉懸臂梁的兩個橫向耦合振動。其次,分析了多種參數對微陀螺儀靜態變形的影響,并求得了系統前2階固有頻率。研究發現不同參數對系統固有頻率的影響規律,并討論了系統驅動和敏感方向上的動力學放大效應及其校正曲線。
關鍵詞: 振動微陀螺儀; 懸臂梁; 動態分析; 固有頻率; 校正曲線
中圖分類號: O326;TB123 ?文獻標志碼: A ?文章編號: 1004-4523(2020)04-0742-08
DOI:10.16385/j.cnki.issn.1004-4523.2020.04.012
引 言
近年來,微機械系統在制造成本、批量生產、重量、尺寸、耐久性、能耗和與集成電路兼容方面的優良性能使得它在測試和制造新設備方面具有廣闊的發展前景[1]。微機械設備如微型泵、微鏡、麥克風等微型諧振器,隨機存儲器、微型機器人、超靈敏傳感器、微陀螺儀,在設備通信中的高頻操作和快速切換網絡方面具有很多種類的應用[2]。其中微陀螺儀廣泛的存在于工程系統中,如相機、飛行器、汽車和衛星,用于跟蹤它們的方位并且控制它們的路徑。由于微陀螺儀復雜的動力學特性和極小的檢測信號使得其成為微機械加工中最具挑戰性的器件之一[3]。
微型陀螺儀具有多種類型的驅動和檢測原理,如靜電或壓電等方式。振梁微陀螺儀是基于振動結構兩種模式之間的能量交換而工作的。通過研究兩端簡支旋轉梁,Yang和Fang[4]建立了壓電振梁陀螺儀的運動方程,研究了不同的幾何和物理參數對電壓敏感性的影響。利用Hamilton原理對末端帶有質量塊的懸臂梁動力學建模,Bhadbhade等[5]提出了一種新的振動-扭轉型振梁陀螺儀并研究了其陀螺效應。為建立微陀螺的頻率方程,Esmaeili等[6]提出了一個通用的建模框架,該框架被模型化為受到一般基座激勵下末端有質量塊的懸臂梁結構。利用此頻差法的思想,Ghommem和Abdelkefi[7]對納米晶材料頻差陀螺儀進行了性能分析。Ghayesh等[8]針對靜電振動微陀螺儀應用修正偶應力理論,研究了微陀螺儀尺寸效應相關的動力學性能。
在靜電微陀螺儀實際工作中,當微梁末端質量塊兩端的固定電極上加載的電壓等于或者大于其臨界電壓時,臨界靜電力可將質量塊在很短的時間內吸合,其中恢復力不能抵抗電容力導致電極相互坍塌,從而產生吸合失穩。針對靜電驅動微懸臂梁由于電場、偏轉梁的幾何和慣性等引起的系統非線性,Chaterjee和Pohit[9]建立了有較大間隙且與地面分離的微懸臂梁的綜合模型并對其進行了靜態分析。考慮靜電力和幾何非線性的影響,Mojahedi等[10-11]研究了靜電微陀螺儀受到靜電驅動和分子間力(范德華力和卡西米爾力)對系統非線性運動的靜態吸合失穩和動態特性的影響。利用多尺度方法,Lajimi等[12]以及Ghommem等[13]分別研究了靜電力引起系統非線性時的動力學和頻率響應特性。
Rasekh和Khadem[14]提出了一種在模式匹配條件下具有高工作頻率的振梁陀螺儀,但是,Lajimi等[13]將此模型稱之為梁-質量型陀螺儀,Lajimi等通過引入剛體的轉動慣量得出了更為準確的梁-剛體型陀螺儀模型,并用有限元法做了驗證。基于靜電驅動和電阻變化檢測原理,Ghommem和Abdelkefi[16]設計了一種新型微陀螺儀并用仿真結果證明了新傳感技術的可行性。通過引入懸臂梁末端質量塊的偏心率,Lajimi等[17-18]研究了非線性微陀螺儀的參數性能和機械熱噪聲。
本文依據Hamilton原理對靜電振梁陀螺儀建立了動力學方程,主要研究無量綱參數αv,w對微陀螺儀的靜態和動態性能。參數αv,w是由方程無量綱化得到的,跟梁的長度和電容器的面積成正比,跟梁的抗彎剛度和質量塊與電容器的間隙距離成反比,如改變梁的長度或抗彎剛度即可改變無量綱參數αv,w的值,由此可統一研究無量綱參數αv,w對微陀螺的性能影響。本文研究了無量綱參數對微陀螺靜態特性的影響,發現轉速、轉動慣量和梁末端質量塊對系統靜態特性沒有顯著影響,但隨著無量綱參數αv,w的增大,系統吸合失穩越來越小。接著分析了參數αv,w對系統1階和2階固有頻率的影響。最后研究了驅動電壓VAC和參數αv,w對系統敏感和驅動方向上的動力學放大和校正曲線的影響。
1 微陀螺儀建模
3.3 校正曲線
在參數VDC=4, αv,w=0.01694, ω=1.3, c =0.065和Mr=1作用下,圖8展示系統在敏感和驅動方向上的校正曲線隨驅動電壓VAC幅值的變化。當其他參數不變時,隨著VAC的增大,在圖8(a)中可發現敏感方向上的最大位移vM是增大的,并且,當轉速Ω增大時,vM是隨著轉速呈線性正比的,由此可測量出振動微陀螺的轉速。當其他參數不變時,隨著VAC幅值的增大,在圖8(b)中發現驅動方向上的最大位移wM是增大的,但是,當轉速Ω增大時,wM是不變的。VAC幅值越大,vM越大,系統的敏感度越高。
在參數VDC=4, VAC=0.1, ω=1.3, c =0.065和Mr=1作用下,圖9描述系統在敏感和驅動方向上的校正曲線隨參數αv,w的變化。當其他參數不變時,隨著αv,w的增大,在圖9中發現vM和wM是增大的,但當Ω增大時,wM是不變的,vM是隨著Ω呈線性正比的,由此可測量出振動微陀螺的轉速。當無量綱參數αv,w=0.01894時,敏感方向上的最大位移vM相比αv,w=0.01694和αv,w=0.01494高很多,αv,w越大,系統能達到的振動幅值越大,靈敏度越高,跟3.2節得到了一致的結論。
4 結 論
本文介紹了一種單軸振梁微陀螺儀,利用Hamilton原理對懸臂梁陀螺進行了建模,同時得到了系統的運動方程和邊界條件。通過設解的形式并代入邊界條件對方程進行了求解,分析了系統的靜態變形并得到了系統的前2階固有頻率,以及研究了靜電微陀螺儀的動力學放大效應和校正曲線。以下是得到的幾點結論。
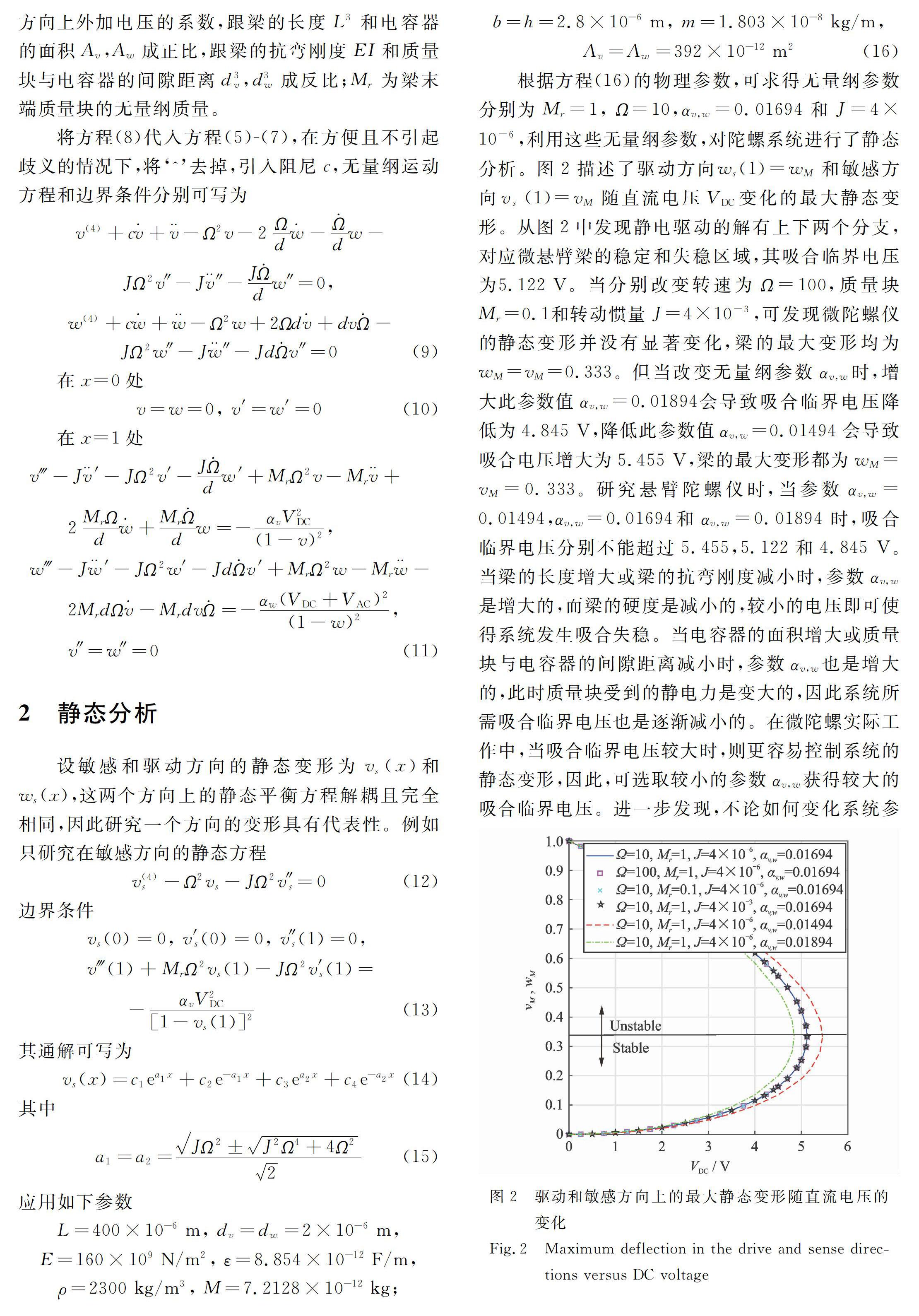
(1)不論如何變化系統參數,當變形達到間隙間距的33%時,該系統就會吸合失穩。
(2)在不同的αv,w影響下,當系統發生吸合失穩的時候,系統1階固有頻率減小直到零,系統2階固有頻率并不等于零并依然存在。
(3)當梁的長度增大或梁的抗彎剛度減小或電容器的面積增大或質量塊與電容器的間隙距離減小時,可使參數αv,w增大,相同的電壓驅動系統產生更大的變形,系統能達到的振動幅值越大,靈敏度越高。
(4)隨著驅動電壓VAC幅值和無量綱參數αv,w的增大,系統在驅動和敏感方向上的最大位移wM和vM是增大的,但是,當轉速Ω增大時,wM是不變的,而vM是隨著轉速呈線性正比的,由此即可測量出振動微陀螺的轉速。
參考文獻:
[1] Chao P C P, Chiu C W, Tsai C Y. A novel method to predict the pull-in voltage in a closed form for micro-plates actuated by a distributed electrostatic force[J]. Journal of Micromechanics and Microengineering, 2006, 16 (5): 986-998.
[2] Mojahedi M, Moeenfard H, Ahmadian M T. A new efficient approach for modeling and simulation of nano-switches under the combined effects of intermolecular surface forces and electrostatic actuation[J]. International Journal of Applied Mechanics, 2009, 1(2): 349-365.
[3] Ghommem M, Nayfeh A H, Choura S, et al. Modeling and performance study of a beam microgyroscope[J]. Journal of Sound and Vibration, 2010, 329(23): 4970-4979.
[4] Yang J S, Fang H Y. Analysis of a rotating elastic beam with piezoelectric films as an angular rate sensor[J]. IEEE Transactions on Ultrasonics Ferroelectrics and Frequency Control, 2002, 49(6): 798-804.
[5] Bhadbhade V, Jahli N, Mahmoodi S N. A novel piezoelectrically actuated flexural/torsional vibrating beam gyroscope[J]. Journal of Sound and Vibration, 2008, 311(3-5): 1305-1324.
[6] Esmaeili M, Jalili N, Durali M. Dynamic modeling and performance evaluation of a vibrating beam microgyroscope under general support motion[J]. Journal of Sound and Vibration, 2007, 301(1-2): 146-164.
[7] Ghommem M, Abdelkefi A. Performance analysis of differential-frequency microgyroscopes made of nanocrystalline material[J]. International Journal of Mechanical Sciences, 2017, 133: 495-503.
[8] Ghayesh M H, Farokhi H, Alici G. Size-dependent performance of microgyroscopes[J]. International Journal of Engineering Science, 2016, 100: 99-111.
[9] Chaterjee S, Pohit G. A large deflection model for the pull-in analysis of electrostatically actuated microcantilever beams[J]. Journal of Sound and Vibration, 2009, 322(4-5): 969-986.
[10] Mojahedi M, Ahmadian M T, Firoozbakhsh K. The oscillatory behavior, static and dynamic analyses of a micro/nano gyroscope considering geometric nonlinearities and intermolecular forces[J]. Acta Mechanica Sinica, 2013, 29(6): 851-863.
[11] Mojahedi M, Ahmadian M T, Firoozbakhsh K. Static deflection and pull-in instability analysis of an electrostatically actuated mirocantilever gyroscope considering geometric nonlinearities[J]. Journal of Mechanical Science and Technology, 2013, 27(8): 2425-2434.
[12] Lajimi S A M, Heppler G R, Abdel-Rahman E M. Primary resonance of a beam-rigid body microgyroscope[J]. International Journal of Non-Linear Mechanics, 2015, 77: 364-375.
[13] Ghommem M, Nayfeh A H, Choura S. Model reduction and analysis of a vibrating beam microgyroscope[J]. Journal of Vibration and Control, 2013, 19(8): 1240-1249.
[14] Rasekh M, Khadem S E. Design and performance analysis of a nanogyroscope based on electrostatic actuation and capacitive sensing[J]. Journal of Sound and Vibration, 2013, 332(23): 6155-6168.
[15] Lajimi S A M, Heppler G R, Abdel-Rahman E. On modeling beam-rigid-body microgyroscopes[J]. Applied Mathematical Modelling, 2017, (42): 753-760.
[16] Ghommem M, Abdelkefi A. Novel design of microgyroscopes employing electrostatic actuation and resistance-change based sensing[J]. Journal of Sound and Vibration, 2017, 411: 278-288.
[17] Lajimi S A M, Heppler G R, Abdel-Rahman E M. A mechanical-thermal noise analysis of a nonlinear microgyroscope[J]. Mechanical Systems and Signal Processing, 2017, 83: 163-175.
[18] Lajimi S A M, Heppler G R, Abdel-Rahman E M. A parametric study of the nonlinear dynamics and sensitivity of a beam-rigid body microgyroscope[J]. Communications in Nonlinear Science and Numerical Simulation, 2017, 50: 180-192.
Abstract: This paper introduces a single-axis electrostatic micro-gyroscope made of a cantilever beam and a proof mass fixed at the free end of the beam. The proof mass is under the coupled action of two fixed electrodes, both of which are connected to DC voltage to produce larger static deformation. The electrode in the driving direction is also subjected to AC voltage, which drives the proof mass to produce the primary vibration. Due to the rotation, a second-order vibration is generated by the Coriolis force in the sense direction which is perpendicular to the primary vibration. Therefore, the angular speed can be measured by detecting the amplitude of the second-order vibration. First, the governing equations of vibrating beam micro-gyroscope are deduced by Hamilton principle and the two transverse coupled vibrations of the rotating cantilever beam are investigated. Next, the influence of multiple parameters on the static deformation of micro-gyroscope is analyzed and the first two natural frequencies of the system are obtained. The effects of different parameters on the natural frequencies of the system are presented, and the dynamic amplification effect and its calibration curve in the drive and sense directions of the system are discussed.
Key words: vibrating micro-gyroscope; cantilever beam; dynamic analysis; natural frequency; calibration curve