一種仿尺蠖式輸電線路巡檢機器人越障運動分析
2020-08-03 02:45:14王吉岱梁茂軒孫愛芹王智偉
科學技術與工程 2020年19期
關鍵詞:動作
王吉岱, 梁茂軒, 孫愛芹* , 王智偉, 劉 毅, 張 斌
(1.山東科技大學機械電子工程學院,青島 266590;2.國電南瑞科技股份有限公司,南京 211000)
輸電線路巡檢機器人是一種代替人工進行輸電線路巡檢作業的電力作業機器人,其中機器人手臂作業空間小、無法跨越引流線等復雜障礙、越障可靠性能差等因素一直是限制其推廣應用的技術難點。
輸電線路巡檢機器人一直是中外電力機器人領域研究的熱點,早在20世紀90年代初,發達國家就對其進行了研制,其中代表性的有加拿大魁北克水電研究院研究的“LineScout”機器人[1-2]及日本HiBot公司研制的“OPGW”機器人[3]等。20世紀90年代末,中國一些研究機構及高校也展開了相關研究工作并取得了突出進展,其中最具代表性的有武漢大學團隊研制的雙臂式巡檢機器人[4-5]、山東科技大學團隊研制的仿猿式三臂巡檢機器人[6]及中國科學院自動化研究所研制的多臂式巡檢機器人[7-8]等。總體來看,目前中外研究機構所研制的巡檢機器人基本均可以實現簡單障礙(間隔棒、防振錘等)的穩定跨越,但大多還不能實現引流線等復雜障礙的跨越。山東科技大學所研制的仿猿式巡檢機器人[9]雖然可以基本完成引流線障礙的跨越,但中臂作為重心平衡臂,并不能實時調節機器人重心位置,在風力或重力的干擾下,易出現機器人前后傾覆及打滑下墜的現象,越障穩定性較差。
針對上述問題,設計一種能穩定跨越引流線等復雜障礙的巡檢機器人。通過觀察與分析尺蠖運動特點,結合仿生學理論對機器人結構進行設計。運用運動學知識及ADAMS軟件對機器人越障運動進行仿真與分析,并進行實驗驗證機器人結構設計的合理性及機器人越障過程的穩定可靠性。
1 機器人仿尺蠖式結構設計
1.1 尺蠖運動分析
尺蠖屬于無脊椎動物,運動方式為屈伸蠕動[10],其運動過程中,胸足和腹足、臀足分別起著保持器的作用,這三種足在不同階段控制著尺蠖的身體與固定物保持著不同的關系,尺蠖的身體部分則起著推進器的作用。把尺蠖一個運動周期內的運動分解,如圖1所示,可以得到以下運動規律:①胸足、腹足和臀足均抓緊固定物,軀干處于舒張狀態并靜止;②胸足抓附固定物,腹足和臀足脫離固定物,軀干收縮,胸足和臀足跟隨軀干的收縮移動,腹足和臀足貼近胸足后,腹足和臀足再次抓附固定物;③胸足脫離固定物,軀干舒張并伸長,當胸足越過障礙物并找到合適的位置后,胸足再次抓附固定物;④腹足和臀足脫離固定物,軀干收縮并越過障礙物,腹足和臀足跟隨越過障礙物,貼近胸足后再次抓附固定物。尺蠖的一個屈伸動作,可使身體移動距離h,h與腹足和胸足間的距離有關。尺蠖蠕動式運動穩定可靠,軀干的舒張動作使尺蠖具有較大的空間越障能力,可以完成空間中較大障礙的跨越。

圖1 尺蠖運動示意圖Fig.1 Schematic diagram of inchworm motion
1.2 機器人本體結構設計
通過分析尺蠖運動機理,結合巡檢作業環境,運用仿生學理論,設計輸電線路巡檢機器人本體結構如圖2所示。前行走臂、中臂及后行走臂分別模仿尺蠖的胸足、臀足及腹足;中臂具有伸縮機構及滑移機構,末端為手爪結構,通過中臂沿導軌方向的前后滑移動作模仿尺蠖的屈伸蠕動動作;箱體具有滑移結構,可沿導軌方向前后滑移,實現機器人重心平衡調節。前、后行走臂對稱布置在導軌兩端,其結構組成均由大臂及小臂組成,小臂、大臂與導軌機架構成三角形結構,更具穩定性,可承受較大的剛性沖擊。大臂可完成伸縮動作及繞O點的外擺動作,其中大臂的外擺動作通過小臂的伸縮動作實現,小臂伸縮量ΔL與手臂外擺角度θ滿足關系式:

圖2 機器人本體結構圖Fig.2 Robot body structure diagram

(1)
式(1)中:LAB、LOA、LOB分別表示點A與B、O與A、O與B之間的距離。行走臂末端為行走輪機構,可完成機器人行駛動作及行走輪開合動作。行走輪下部為中空腔體結構,機器人在低速狀態下,可直接穿越防振錘障礙。
除防振錘障礙外,針對線路上其他障礙,機器人均需以尺蠖式(蠕動式)運動方式完成兩行走臂的交替越障,機器人前行走臂越障動作序列如圖3所示。①機器人停止在障礙前方,中臂滑移至導軌前端后伸出抓取線路,如圖3(a)所示,此時中臂的滑移動作相當于尺蠖的軀干收縮動作,機器人在中臂、后行走臂及箱體的作用下保持平衡;②前行走臂脫離線路并探尋障礙物另一側合適的抓附點,如圖3(b)所示,此時中臂底部的滑移機構與后行走輪相當于尺蠖身體中部的軀干部分,起推進作用;③在推進作用下巡檢機器人前行走臂向前移動h距離,待前行走臂越過障礙物并找到合適的抓附位置A3后重新抓附線路,如圖3(c)所示,后行走臂越障序列與前行走臂越障序列類似。

圖3 機器人蠕動式越障運動Fig.3 Robot peristaltic obstacle-crossing movement
通過分析機器人蠕動式運動序列可以發現,在機器人前臂不外擺的情況下,機器人單次運動距離最大為從A1位置到A3位置,即中臂相對機器人本體的位置從C1到C2,即A1A3=C1C2=h,h和巡檢機器人前后行走臂之間的距離有關,h的大小決定著機器人在手臂不外擺的情況下,機器人可通過的最大障礙尺寸。
2 機器人蠕動式越障運動學分析
2.1 機器人蠕動式越障過程正運動學分析
機器人越障過程中,主要運動為越障臂(正在越障的行走臂)和中臂的配合動作,與另一個行走臂約束關系較小,故可將機器人越障模型簡化為越障臂和中臂。行走輪開合動作不影響機器人位姿及越障臂末端位置,故忽略行走輪開合運動。將越障臂小臂的伸縮運動等效為越障臂的外擺運動,以中臂手爪抓握線路部位為基坐標系原點(O0)建立機器人連桿D-H坐標系如圖4所示,由齊次坐標變換法[11]知相鄰兩連桿之間滿足關系式:

圖4 機器人連桿坐標系Fig.4 Robot connecting rod coordinate system

(2)
通過分析線路上障礙尺寸及分布情況,設計機器人各連桿參數如表1所示,機器人蠕動式越障初始狀態下,d1=-548mm;d2=250mm;θ3=-90°;d4=548mm。

表1 機器人連桿參數表
(3)

(4)

(5)


(7)
式(7)中:u、v、w、p是越障臂末端在基坐標系中的期望位置與姿態。從式(7)可知,機器人越障臂末端位置與機器人位姿由轉角θ3及各關節伸縮量相關。
2.2 機器人蠕動式越障過程逆運動學分析
若已知越障臂末端目標位置,可依據機器人逆運動學法對機器人各個關節運動變量進行解算,從而為機器人越障動作進行合理的規劃,實現機器人線路障礙的跨越。機器人各關節運動變量解算過程如下:

(8)
對應兩邊元素可得:

(9)
從式(9)可以發現,越障臂末端在基坐標系Z軸方向的位置由中臂的伸縮、越障臂的伸縮及外擺實現。越障臂末端在基坐標系Y軸方向的位置由中臂的滑移、越障臂的伸縮及外擺實現。一般情況下,機器人存在多組運動學逆解,甚至無窮多組逆解,無法解算出機器人各關節變量值,故在機器人與障礙物不發生碰撞的前提下,對機器人運動學逆解做出如下約束:①在越障臂末端能到達目標位置的前提下,關節運動數量最少時,解最優;②在關節運動數量相等情況下,以中臂滑移量最小及中臂伸縮量最小時,解最優。經上述約束后,機器人運動學逆解有唯一最優解。
忽略線路柔性變形,中臂伸出抓握線路,取抓握位置為O,依據機器人各關節運動參數繪制出越障臂作業空間如圖5中ABCDEFG組成的多邊形所示,從圖5中可以看出,越障臂在線路上部及下部均具有較大的作業空間,特別是中臂滑移動作,大大擴展了越障臂的作業空間范圍。越障臂作業空間范圍大于線路上各種金具障礙尺寸,具備跨越引流線等復雜障礙的前提條件。添加逆運動學解約束后,不同作業空間區域內機器人關節動作情況如表2所示。若已知越障臂末端目標位置,將其對應至相應越障臂作業空間區域,即可解算出機器人各關節運動變量,依據各關節運動變量對機器人運動進行控制。

表2 機器人關節動作分布情況表

圖5 越障臂作業空間Fig.5 Working space for obstacle-crossing arm
3 機器人蠕動式越障過程仿真分析
結合機器人運動學分析結果,運用ADAMS軟件對機器人從引流線跨越至輸電線路的過程進行仿真分析,機器人跨越引流線障礙過程仿真如圖6所示。

圖6 機器人跨越引流線過程仿真Fig.6 Simulation of the process of the robot crossing the drainage line
機器人位于引流線最低點時,各關節處于初始狀態,機器人在前后行走輪的驅動下前進,如圖6(a)所示;機器人攀爬至合適位置后,機器人停止行走,中臂滑移至導軌前端,同時箱體在重心調節電機的作用下滑移至導軌后端,中臂伸出抓取線路,如圖6(b)所示;待中臂抓緊線路后,機器人前行走臂伸出脫離線路,前行走輪打開,由機器人運動學分析結果得,前行走臂跨越引流線過程中,僅需大臂外擺一定角度即可伸出抓取輸電線路,如圖6(c)所示;待前行走輪準確掛線后,中臂打開脫離線路,此時,機器人處于前后行走臂掛線狀態,機器人前進,待機器人攀爬至后臂行走輪接近輸電線路和引流線交匯處時停止行走,如圖6(d)所示;機器人中臂伸出抓緊線路,開始進行后行走臂引流線障礙的跨越,后行走臂伸出脫離線路后,在前行走輪及中臂滑移電機的作用下向前移動,如圖6(e)、圖6(f)所示;當后行走臂越過引流線障礙到達合適位置后,后行走臂伸出抓取線路,如圖6(g)所示;待后行走臂準確掛線后,機器人恢復至初始姿態,如圖6(h)所示,至此,機器人跨越引流線障礙運動完成。
通過越障仿真過程可以發現,機器人以蠕動的運動方式可以完成引流線障礙跨越。越障過程中機器人始終至少有兩條手臂處于掛線狀態,保證了機器人的安全性能。由前行走輪豎直方向上重心變化曲線可以發現,越障手臂脫離線路后,沒有在豎直方向上出現大幅度的沉降,說明箱體起到了很好的重心平衡作用,驗證了機器人重心調節的有效性,前行走輪重心變化曲線如圖7所示。
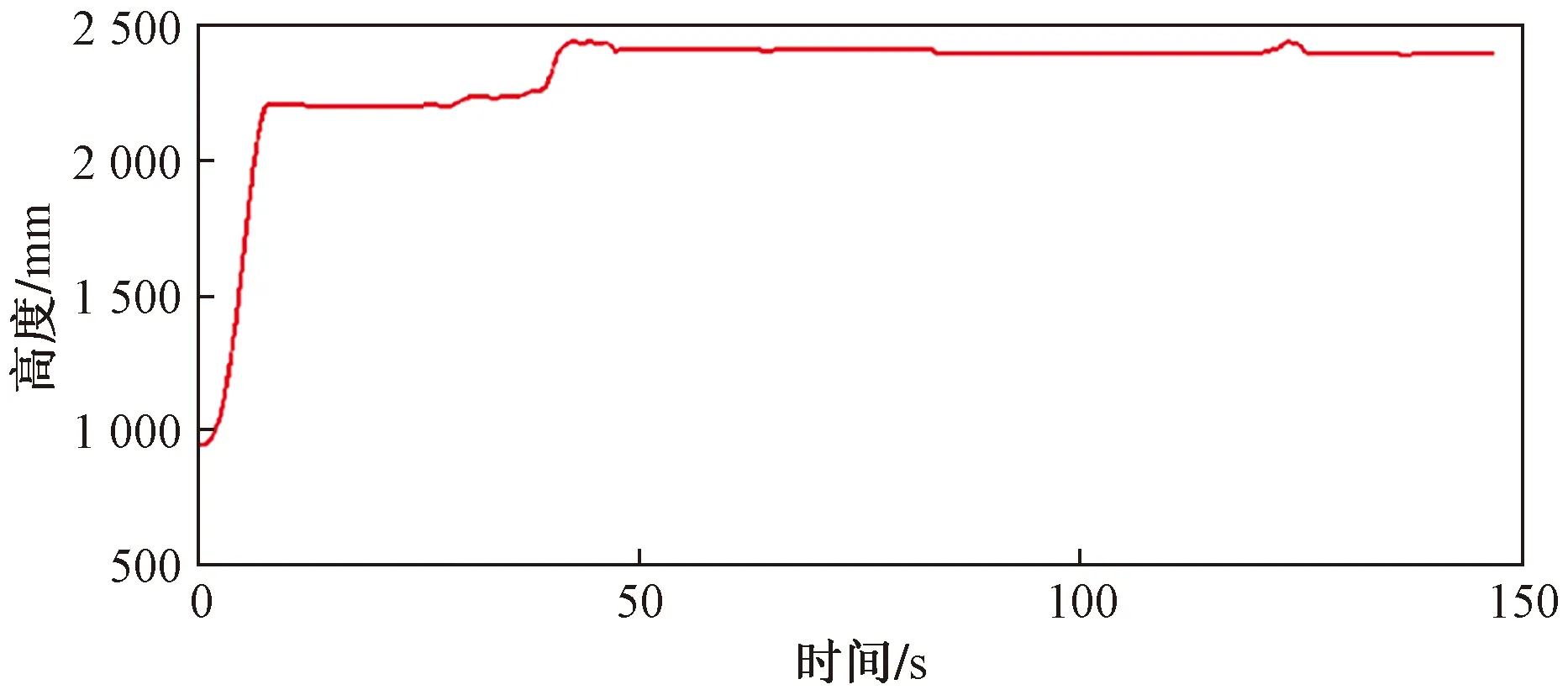
圖7 前行走輪重心變化曲線Fig.7 Variation curve of center of gravity of front walking wheel
4 實驗與驗證
對機器人越障運動進行仿真分析后,進行物理樣機的制作,并將樣機置于模擬線路進行實驗,模擬線路中各金具障礙參數與實際線路金具障礙參數相同。
(1)為測試機器人爬坡性能是否滿足越障要求,將樣機置于模擬線路上引流線段進行實驗,如圖8所示。通過改變引流線段的垂度來實現線路的不同坡度,觀察機器人在不同坡度線路下的行走狀況。實驗結果表明:線路坡度在40°內機器人不會發生打滑現象,機器人滿足爬坡性能要求。

圖8 機器人爬坡示意圖Fig.8 Schematic diagram of robot climbing
(2)為驗證機器人結構設計的合理性及越障過程的穩定性,將樣機置于模擬線路進行防振錘、間隔棒、懸垂線夾及引流線等障礙跨越實驗。機器人跨越引流線障礙實驗如圖9所示,機器人實際越障過程中關節動作與仿真實驗越障過程中關節動作基本一致,越障過程耗時約2.4 min。越障過程中,機器人在箱體重心自適應調節的作用下,重心波動較為平穩,沒有發生前后傾覆現象;機器人在中臂手爪的抓握作用下,在受到風力載荷等外界擾動時沒有發生打滑下墜現象,驗證了機器人具有很好的重心平衡能力與穩定越障能力。

圖9 機器人跨越引流線實驗Fig.9 Experiment of robot crossing drainage line
多次實驗后,將機器人目標參數與機器人實際功能參數進行對比,對比結果如表3所示。對比表3中數據可得機器人具有較強的爬坡能力與負載能力,越障效率較高,機器人各實際功能參數滿足目標設計要求。

表3 機器人目標參數與實際功能參數對比表
5 結論
針對目前輸電線路巡檢機器人作業空間小、不能穩定跨越引流線等復雜障礙的問題,通過分析尺蠖運動特點,研制了一款新型的仿尺蠖式巡檢機器人,對其越障運動過程進行仿真與實驗得出以下結論。
(1)通過中臂的前后滑移動作模仿尺蠖的屈伸蠕動動作,擴展了越障行走臂的作業空間,機器人可以實現引流線等復雜障礙的跨越。
(2)蠕動式越障運動過程中,在中臂手爪抓握及箱體重心自適應調節的作用下,機器人重心起伏波動較為平穩,越障過程穩定可靠。
(3)以蠕動式運動方式,機器人可以實現線路上多種類型障礙的穩定跨越,為輸電線路巡檢機器人研發提供了一種新的思路。
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
