混合動(dòng)力汽車驅(qū)動(dòng)控制策略優(yōu)化研究
2020-07-20 03:24:56陳珂立
汽車世界·車輛工程技術(shù)(上) 2020年3期
陳珂立
摘 要:為進(jìn)一步提高混合動(dòng)力汽車驅(qū)動(dòng)系統(tǒng)的動(dòng)力性和燃油的經(jīng)濟(jì)性,進(jìn)而設(shè)計(jì)了并聯(lián)式驅(qū)動(dòng)控制策略并對(duì)動(dòng)力系統(tǒng)進(jìn)行了優(yōu)化。遺傳算法具有尋優(yōu)能力強(qiáng)和魯棒性的特點(diǎn),利用其對(duì)隸屬度函數(shù)和模糊規(guī)則進(jìn)行優(yōu)化,以達(dá)到提升驅(qū)動(dòng)控制系統(tǒng)性能的目的。
關(guān)鍵詞:混合動(dòng)力汽車;模糊控制;遺傳算法
0 前言
混合動(dòng)力汽車在結(jié)構(gòu)組成上很簡(jiǎn)單,只需在現(xiàn)有的汽車結(jié)構(gòu)上進(jìn)行直接改造,便能獲得非常廣泛的應(yīng)用效果。PHEV驅(qū)動(dòng)模式能效降低燃油的消耗,實(shí)現(xiàn)節(jié)能減排目標(biāo),但要想使各個(gè)驅(qū)動(dòng)模式都進(jìn)行無縫和平滑的轉(zhuǎn)換,還需要加強(qiáng)對(duì)PHEV驅(qū)動(dòng)控制系統(tǒng)進(jìn)行深入的研究。PHEV驅(qū)動(dòng)控制系統(tǒng)在運(yùn)行過程中會(huì)受到很多隨機(jī)因素的影響,是一個(gè)多變量的非線性系統(tǒng),進(jìn)而增加的驅(qū)動(dòng)優(yōu)化的難度。模糊邏輯控制運(yùn)用其魯棒性的特點(diǎn),不需要建立相關(guān)的數(shù)學(xué)模型,將其應(yīng)用于混合動(dòng)力汽車驅(qū)動(dòng)控制系統(tǒng)優(yōu)化設(shè)計(jì)能夠起到很好的效果。同時(shí)還可采用遺傳算法對(duì)模糊子集劃分和隸屬度函數(shù)進(jìn)行優(yōu)化,使驅(qū)動(dòng)控制系統(tǒng)具有自學(xué)能力提高PHEV的燃油經(jīng)濟(jì)性。
1 PHEV模糊驅(qū)動(dòng)控制策略設(shè)計(jì)
對(duì)驅(qū)動(dòng)控制系統(tǒng)進(jìn)行優(yōu)化的目的在于能夠很好地保證混合動(dòng)力車的性能,并對(duì)汽車行駛過程的所需求的轉(zhuǎn)矩進(jìn)行合理的分配,讓發(fā)動(dòng)機(jī)處于高效工作狀態(tài),這時(shí)好需要將動(dòng)力電池SOC值保持其在規(guī)定的范圍內(nèi)進(jìn)行浮動(dòng),有效保證電池的使用壽命。
模糊控制器在進(jìn)行設(shè)計(jì)時(shí)對(duì)于輸入的變量控制在兩個(gè),一個(gè)是指車輛在進(jìn)行行駛時(shí)其請(qǐng)求轉(zhuǎn)矩和發(fā)動(dòng)機(jī)轉(zhuǎn)矩所形成的差值,另一個(gè)則是能夠保持汽車動(dòng)力的蓄電池在蓄電池組荷電狀態(tài)的SOC值。為輸入變量的主要原因是保證整個(gè)發(fā)動(dòng)機(jī)都能保證在最優(yōu)轉(zhuǎn)矩的曲線范圍內(nèi)上下進(jìn)行浮動(dòng)。當(dāng)在對(duì)模糊控制的輸出變量進(jìn)行設(shè)置時(shí)將其為發(fā)動(dòng)機(jī)轉(zhuǎn)矩系數(shù),并對(duì)其進(jìn)行功率分配,這時(shí)發(fā)動(dòng)機(jī)的實(shí)際轉(zhuǎn)矩將為系數(shù)最優(yōu)轉(zhuǎn)矩,這樣就能得出發(fā)動(dòng)機(jī)的實(shí)際轉(zhuǎn)矩將會(huì)是其需求轉(zhuǎn)矩與發(fā)動(dòng)機(jī)轉(zhuǎn)矩之間的差值。以下舉例輸入?yún)⒘哭D(zhuǎn)矩差值的隸屬度函數(shù)確定過程。
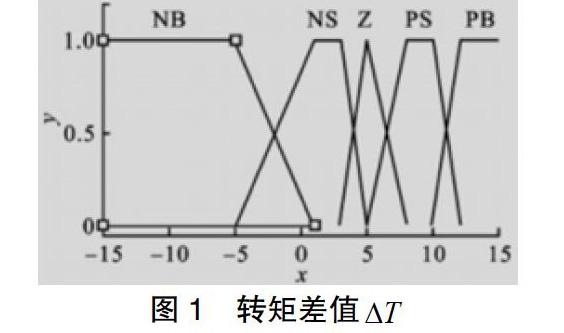
建立在模糊邏輯控制相關(guān)的理論學(xué)習(xí)上,將請(qǐng)求轉(zhuǎn)矩和最優(yōu)轉(zhuǎn)矩之家的差值的語言模糊子集進(jìn)行定義為{NB,NS,Z,PS,PB},根據(jù)發(fā)動(dòng)機(jī)參數(shù)與工況確定論域,進(jìn)而以梯形函數(shù)和三角形函數(shù)的形式對(duì)模糊控制輸出變量的隸屬度函數(shù)進(jìn)行表示,如圖1。
2 基于遺傳算法的優(yōu)化模糊控制器設(shè)計(jì)
在對(duì)模糊控制器優(yōu)化時(shí)需要借助遺傳算法,但必須首先就要有效確定其待尋優(yōu)隸屬度函數(shù)的參數(shù)值,進(jìn)而對(duì)參數(shù)變化的范圍進(jìn)行確定,通過對(duì)相關(guān)參數(shù)做好編碼使其能夠形成染色體,并在此基礎(chǔ)上增加遺傳操作,以達(dá)到尋優(yōu)的效果。
(1)通過優(yōu)化所得到的目標(biāo)函數(shù)值為模型所采用的PHEV車型的耗油量以及尾氣排放值,約束條件為整車的動(dòng)力性參數(shù)以及SOC值整個(gè)工況循環(huán)的變化量,以不同的權(quán)重系數(shù)對(duì)最優(yōu)化的目標(biāo)值進(jìn)行表示,建立起相應(yīng)的適應(yīng)度函數(shù)為:
其中,為目標(biāo)函數(shù),為約束條件下的懲罰函數(shù),為約束條件下的權(quán)重值,為約束條件下的數(shù)目。
(2)對(duì)隸屬度函數(shù)進(jìn)行優(yōu)化。對(duì)隸屬度函數(shù)進(jìn)行編碼雖然能夠細(xì)化其模糊子集,具有操作簡(jiǎn)單等優(yōu)點(diǎn),但實(shí)際卻并不合理,當(dāng)變量的值越接近零點(diǎn)時(shí),對(duì)模糊子集就需要越細(xì)致地劃分,進(jìn)而達(dá)到精準(zhǔn)控制的目的,但這樣會(huì)增加其函數(shù)的陡峭。因此可對(duì)論域進(jìn)行不均勻劃分,在對(duì)不同類型控制系統(tǒng)輸入時(shí)有相應(yīng)的輸出與之對(duì)應(yīng),進(jìn)而使動(dòng)態(tài)性能達(dá)到理想要求。
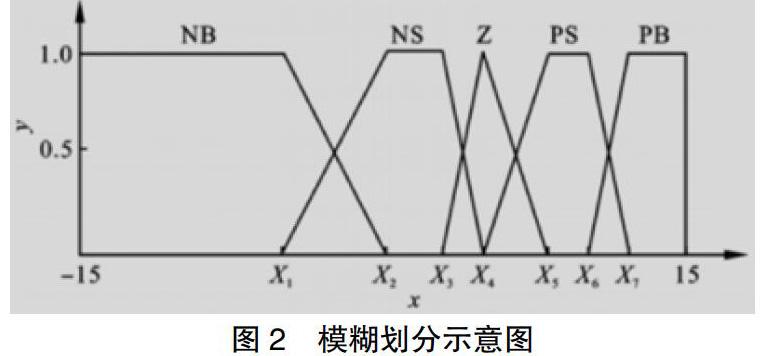
當(dāng)對(duì)模糊編輯控制器進(jìn)行設(shè)計(jì)時(shí)就需要運(yùn)用模糊編號(hào)對(duì)其進(jìn)行劃分,改變編碼方式和自由度,將有效縮短汽車運(yùn)行時(shí)搜索的空間以及計(jì)算時(shí)間。用類對(duì)隸屬度函數(shù)的各個(gè)節(jié)點(diǎn)進(jìn)行劃分,通過輸入變量論域得到模糊劃分和子集的隸屬度函數(shù)如圖2。
3 仿真與分析
將車輛行駛過程的最高車速控制在182km/h,一直保持車輛速度為86.5km/h行駛,爬坡度≥20%用以表征其爬坡能力。在Advisor2002中配置相關(guān)的PHEV主要仿真參數(shù)。
在CYC_UDDS行駛工況下進(jìn)行仿真,通過對(duì)Advisor2002的實(shí)踐可知,UDDS路況下的行駛常用于對(duì)輕便型車輛進(jìn)行測(cè)試,得到行程為12.39km,車速為92.24km/h,行駛時(shí)間為1368s。整個(gè)道路循環(huán)過程包括了起步和停止,充分反映出各個(gè)階段的工作狀態(tài)。
通過仿真,對(duì)比PHEV模糊控制器優(yōu)化前與優(yōu)化后的策略,在CYC_UDDS道路工況下,循環(huán)行駛時(shí)的燃油量將減少0.11L/100km,尾氣排放總量將降低為0.036g/km。
4 總結(jié)
混合動(dòng)力汽車驅(qū)動(dòng)控制系統(tǒng)進(jìn)行優(yōu)化的主要目的在于提高其動(dòng)力性和燃油經(jīng)濟(jì)性,現(xiàn)階段采取最多的優(yōu)化方式就是結(jié)合模糊邏輯控制和遺傳算法,充分發(fā)揮其優(yōu)勢(shì),進(jìn)而對(duì)PHEV驅(qū)動(dòng)設(shè)計(jì)控制策略,并在UDDS行駛工況下進(jìn)行模擬仿真,有效驗(yàn)證了PHEV模糊控制策略能夠進(jìn)一步提高燃油的經(jīng)濟(jì)性,并能在車輛行駛過程中降低其尾氣排放量,提高了整個(gè)動(dòng)力汽車的控制性能。
參考文獻(xiàn):
[1]尹安東,趙韓,孫駿等.基于混雜系統(tǒng)理論的混合動(dòng)力汽車驅(qū)制動(dòng)控制研究術(shù)[J].汽車工程,2015,37(10):1150-1155.
[2]楊世春,朱傳高,高瑩等.并聯(lián)式混合動(dòng)力汽車遺傳模糊控制策略的優(yōu)化研究[J].汽車工程,2011,33(02):106-111.
[3]王耀南,劉東奇.電動(dòng)汽車機(jī)電復(fù)合制動(dòng)力分配策略研究[J].控制工程,2014,21(03):347-351,356.