人體杠桿
2020-07-20 03:25:56盧倩
科學大眾·小諾貝爾 2020年4期

“給我一個支點,我就能撬動整個地球。”阿基米德的這句名言,想必同學們都不陌生。那他這句話說得有道理嗎?其實,他的這個偉大想法運用了杠桿原理。在蘇教版五年級《科學》下冊第1單元“神奇的機械”的第2課《怎樣移動重物》中,就為同學們詳細講解了杠桿原理在生產、生活中的應用。其實,我們的身體運動也有杠桿原理的體現,四年級的同學將會在《科學》下冊第1單元“骨骼與肌肉”的第2課《關節》》和第3課《肌肉》中學習到。
接下來,南京市鼓樓區芳草園小學盧倩老師將帶領同學們走進本期的“加油科學課”,和同學們一起運動起來,尋找運動中的人體杠桿!
同學們,你們能在撬地球的杠桿中找到它的支點、動力臂、阻力臂、動力和阻力嗎?請在圖中畫出來吧!
不知道同學們畫得對不對呢?我們一起來理理思路!
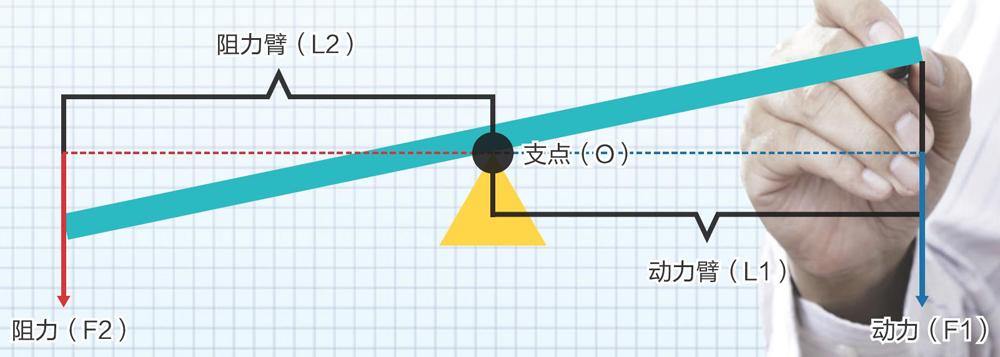
杠桿:能繞一個固定點轉動的硬棒;
支點:杠桿繞著轉動的點,通常用字母O來表示;
動力:使杠桿轉動的力,通常用F1來表示;
阻力:阻礙杠桿轉動的力,通常用F2來表示;
動力臂:從支點到動力作用線的距離,通常用L1表示;
阻力臂:從支點到阻力作用線的距離,通常用L2表示。
杠桿原理:動力F1x動力臂L1=阻力F2x阻力臂L2。
實際上,用杠桿移動地球是不可能的,但是杠桿作為一種簡單機械,很多機器中都有它的存在。
2020年1月1日,首個華為智能無人店在武漢開業,消費者根據屏幕提示購物后,由一大兩小的智能機械臂協同工作取貨。首先,大機械臂抓取陳列箱運至操作臺(負責取貨);然后,再由小機械臂抓取貨物投放至出貨口(負責出貨)。從選定產品到取貨僅需幾分鐘的時間,是智能售貨的充分展示。早在前幾年,實現喂食功能的機械臂、會表演的機械臂不斷涌現,為生活帶來了很多便利。
毋庸置疑,機械臂就是一個可以繞固定點旋轉的硬棒一杠桿。其實,這樣的機械臂仿造了人類的手臂。那么,我們的手臂是不是也是杠桿呢?人體中的運動是不是也和杠桿有關呢?
愛思考的你一定很好奇:組成人體運動系統的是骨、關節、肌肉,運動時,肌肉的收縮和舒張帶動骨骼和關節的運動,這和杠桿有什么關系呢?讓我們在運動中探尋其中的奧秘吧!
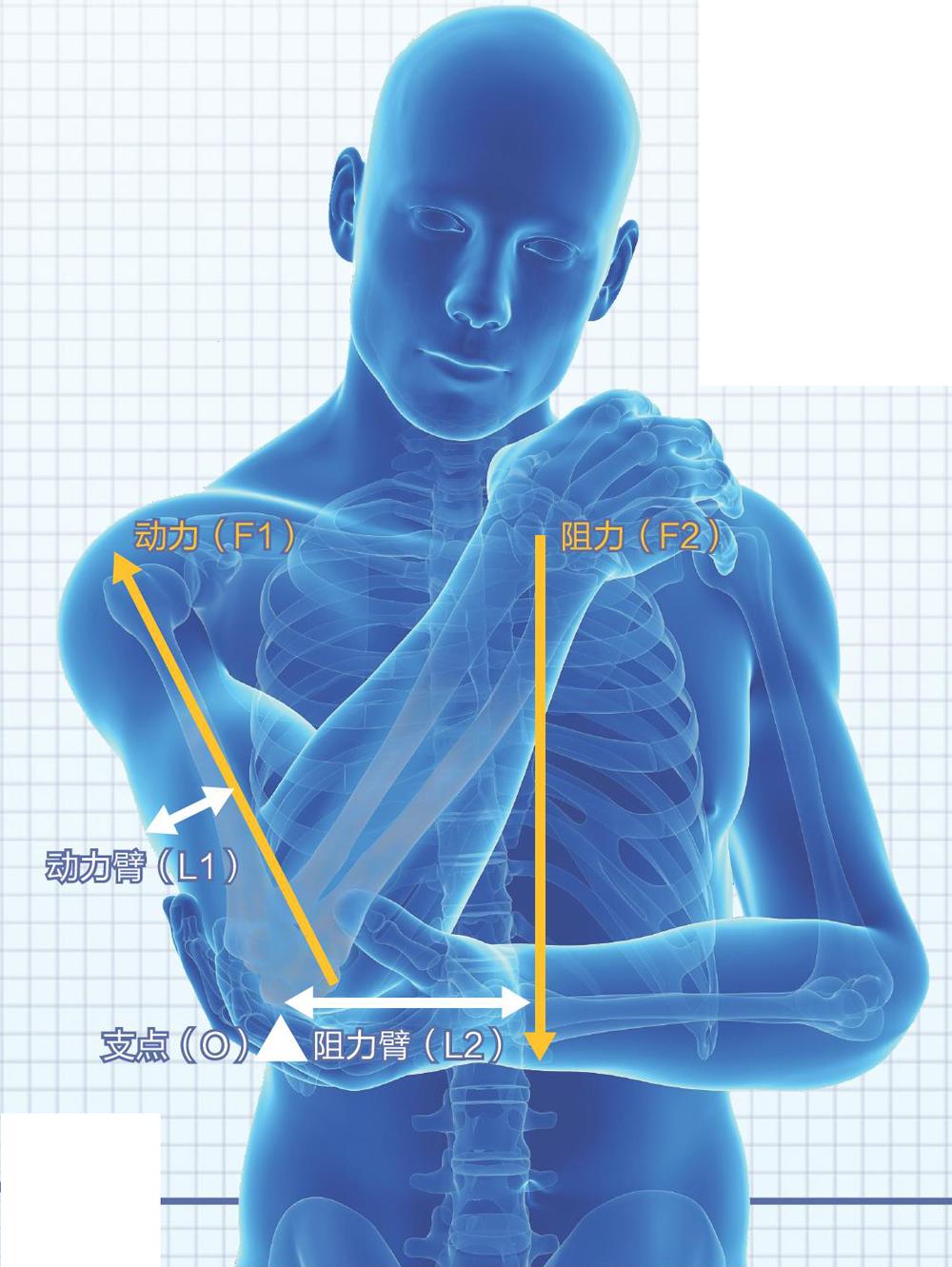
屈肘運動
我們一起來做!請你坐正后將肘關節固定在桌上,前臂自下而,上運動,托起一件重量適中的物體,注意肘關節不動哦!將物體輕輕放下,再來一次!先感受這里有沒有杠桿。如果有,支點、動力、阻力又分別是什么?它們在哪里呢?想好了畫一畫,再往下看哦!
杠桿——我們的前臂是能夠繞著固定點(肘關節)運動的骨頭;
支點——肘關節;
動力——肱二頭肌產生的帶動前臂運動的力;
阻力——物體的重力。
你找對了嗎?
你知道嗎?當你舉起一個重物,肌肉竟然要花費約6倍以上的力氣。為什么會這么費力呢?試著用杠桿原理來分析,它會帶給你全新的認識哦!如左圖所示,我們找到支點(肘關節)到動力(肱二頭肌的拉力)作用線的距離動力臂L1,再找到支點(肘關節)到阻力(物體的重力)作用線的距離一一阻力臂L2,I可以看到:動力臂L1<阻力臂L2。根據動力F1x動力臂L1三阻力F2x阻力臂L2,所以動力F1必須大于阻力F2,顯然這是一種費力杠桿。
雖然費力,但是它可以節省距離(少移動距離),且加快速度,提高工作效率;因此費力杠桿也稱為速度杠桿。
踮腳運動
我們每天行走時,輕輕松松就可以抬起自己的身體。而如果我們想抬起和自己體重一樣的物體,可就非常費力了。你知道為什么嗎?這和我們研究的杠桿有關系嗎?
現在,我們一起慢慢踮起腳尖,兩秒鐘后,放下腳跟,再來一次。試著找一找其中的杠桿在哪里,支點、動力、阻力在哪里。這確實是一個變形的杠桿:
杠桿——我們腳部的骨頭,它們形成一個整體,能夠繞著腳尖轉動;
支點——腳尖部位;
動力——腿肚肌肉產生的拉力,帶動杠桿運動;
阻防——人體的重力。
踮腳確實很輕松,抬起重物卻很費勁,難道這個腳部的杠桿能為我們省力嗎?
我們一起來分析。如左圖所示,我們找到支點(腳尖)到動力(腿部肌肉的拉力)作用線的距離,即動力臂L1;找到支點(腳尖)到阻力(人體重力)作用線的距離,即阻力臂L2。顯而易見,動力臂L1>阻力臂L2。根據杠桿原理,動力F1x動力臂L1=阻力F2x阻力臂L2,可以得出動力F1<阻力F2,這個杠桿是省力杠桿。而且同樣體重下,腳越長,動力臂越大,就越省力。
點頭運動
原來,在我們的身體運動時,不僅有杠桿的應用,還有省力杠桿和費力杠桿之分呢!我們的身體是不是很奇妙呢?說到人體運動,點頭、低頭可以算得上是頻率最高的運動之一了。那么,點頭、低頭中有杠桿原理的應用嗎?
請你和同桌一起做!坐端正,慢慢地低下頭,然后輕輕地抬起頭,再來一次,你找到其中的杠桿了嗎?如果你找到了,請你把它的幾個要素畫在右圖中!
頭顱繞著脊柱頂端轉動,就是一個變形的杠桿:
支點一脊柱頂端是固定不動的點;當我們低頭時,動力一頭顱的重量,脊柱前后肌肉帶來的力量;當我們抬頭時,則恰好相反。
我們認為,支點到動力作用線的距離約等于支點到阻力作用線的距離,如右圖所示。因此,動力大致等于阻力,這個杠桿既不省力,也不費力,我們稱之為等臂杠桿。
不知不覺,相信同學們已經學會了分析人體杠桿的方法,恭喜大家在科學探索的道路上又有了進步!接下來,歡迎大家進入最后的挑戰環節!
劃戰俯臥撐俯臥撐是常見的健身運動,主要鍛煉上肢、腰部及腹部的肌肉,在日常訓練、體育課及軍事體能訓練中都是一項基本訓練。如果條件允許,請你試著做兩個俯臥撐吧!
怎么樣?是不是有點難?確實,對于大部分人來說,這是一項具有挑戰性的運動。你覺得俯臥撐運動涉及省力杠桿、費力杠桿,還是等臂杠桿呢?
像之前土樣,我們先找到杠桿的支點、動力、阻力、動力臂、阻力臂。
杠桿——人的整個身體;
支點——腳與地面的接觸點;
動力——地面對手臂的支持力;
阻力——人體的重力;
動力——臂手掌與腳的距離;
阻力臂——腰到腳的距離。
看到了嗎?動力臂L1>阻力臂L2,根據杠桿原理的公式,動力F1x動力臂L1牛阻力F2x阻力臂L2,可以得出動力F1<阻力F2。其實,這是一個省力杠桿。
雖然俯臥撐運動中的杠桿是省力杠t桿,但是對于提供動力支撐的手臂來說,也是非常有挑戰性的,所以我們感覺到俯臣臥撐有些難。
工中人體中還有很多杠桿原理的應用,當你彎腰起身時,當你擺手或咀嚼食物時,是否也用到了杠桿原理呢?你會分析它們嗎?期待你能更多地嘗試和發現,更全面地認識人體!
實際上,華為商店用到的機械臂、機械爪都是人體杠桿的應用延伸,細心的你七定能夠主動體驗、主動觀察,用科技改變生活!
責任編輯:陸艷 責任校對:夏越
