基于高速開關閥的電靜液作動器非線性仿真研究
2020-07-15 09:05:24司國雷劉宇輝郭大勇鄧健輝劉慶獻
液壓與氣動 2020年7期
唐 兵,司國雷,劉宇輝,郭大勇,鄧健輝,劉慶獻
(四川航天烽火伺服控制技術有限公司,四川 成都 611130)
引言
電靜液作動器(Electro-Hydrostatic Actuator,EHA)是目前國內外研究最為熱門的一種新型電力作動器。它不需使用中心液壓源以及發動機驅動泵,其內部有獨立的液壓源、電機(一般為直流電機)、液壓泵、液壓閥組、作動筒、檢測元件以及控制器。電機由飛機主電源提供電力,它帶動定量泵、控制泵的轉速,從而控制泵輸出的壓力和流量,由泵輸送到作動筒活塞,最終達到控制作動筒位移輸出的目的。其運動方向及速度通過雙向電機進行調節;電機轉向則由誤差信號(指令和實際位置偏差)決定。
目前典型的EHA系統屬于容積控制系統,沒有閥參與控制,按照控制方式的不同分為以下3種形式[1]:定排量變轉速型(EHA-VS)、變排量定轉速型(EHA-VP)和變排量變轉速型(EHA-VSVP)。

針對典型的EHA頻響低,文獻[3]提到的泵閥協調控制雖然兼顧了典型泵控系統的高效率和伺服閥控系統的高頻響等優點,但是由于EHA屬于閉式系統,泵、閥磨損產生的顆粒物難以濾除。由于油液污染更容易導致系統出現故障,故提出了一種基于4個高速開關閥控制的電靜液作動器。采用4個高速開關閥組成一個H橋路,使泵的進、出油口與作動器的A,B油口實現完全獨立控制[4]。由于高速開關閥的開啟、關閉時間很短(均小于1 ms),使得EHA系統頻響可以達到伺服閥控制系統的頻響范圍,同時還具有很高的系統效率。特別適合于火箭發動機的俯仰和偏航通道姿態控制等對作動器的重量和體積要求比較苛刻的場合。
高速開關閥是借助于控制電磁鐵所產生的吸力,使得閥芯高速正、反向運動,從而實現液流在閥口處的交替通、斷功能的電液控制元件。高速響應能力是高速開關閥應具備的最重要的特性。目前中國航天科技集團公司烽火機械廠已經研制成功一種用于脈沖爆震火箭發動機配流的新型先導式大流量高速開關閥,其組成結構如圖1所示。主要性能參數:主閥芯行程1 mm,開啟、關閉時間均不大于0.9 ms,在閥口壓差1 MPa 的情況下,測得的流量大于49 L/min,額定壓力8 MPa[5]。
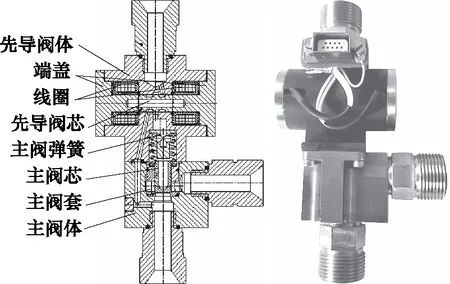
圖1 新型先導式大流量高速開關閥
1 結構原理
由于作動器首尾采用鉸接的形式進行連接,圖2中AE為發動機噴管的中心線,D點位于噴管的外殼邊緣;B點為作動器的上支點;線段AB為作動器的有效力臂。由圖2可知,當作動器伸、縮時,即BD改變長度時,噴管將圍繞A點擺動,同時作動器也會圍繞B點擺動,從而使得作動器的有效力臂AC的長度也會改變。
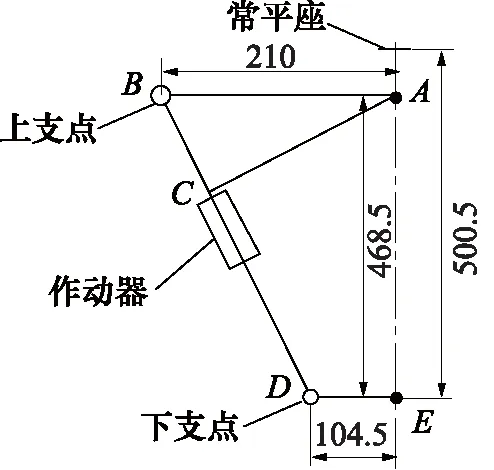
圖2 火箭二級主發動機俯仰和偏航通道姿態控制結構圖
基于高速開關閥的電靜液作動器系統方案如圖3所示。通過轉速傳感器對無刷直流電機的轉速進行閉環控制,從而實現對泵輸出流量的控制。通過角度轉速傳感器對高速開關閥或泵進行控制,從而實現對作動器的位移控制,最終到達控制發動機擺角的目的。
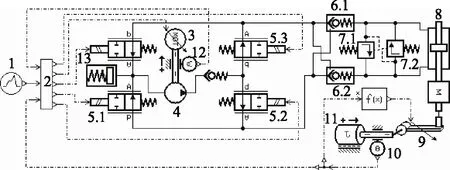
1.輸入信號 2.伺服驅動及高速開關閥控制器 3.無刷直流電機 4.液壓泵 5.高速開關閥 6.液控單向閥 7.安全閥 8.作動器 9.模擬連桿機構 10.角度傳感器 11.模擬負載 12.轉速傳感器 13.彈簧式蓄能器圖3 基于高速開關閥的電靜液作動器系統控制方案
采用4個常開式高速開關閥,使泵到作動器的液壓通道構成H型橋路,通過分別控制4個高速開關閥的開啟、關閉時序實現作動器A,B油口進、出油的完全獨立控制。2個液控單向閥構成1個液壓雙向鎖,在達到目標角度后鎖定作動器。2個安全閥構成雙向式安全閥,當作動器承受的負載超過額定負載時,發生溢流,從而保證作動器不受高壓沖擊;當負載是大慣量負載時,可起到緩沖作用。彈簧式蓄能器用于補償油液由于溫度變化導致的體積變化,同時也為泵的吸油口提供背壓,防止在高轉速情況下,泵的吸油口出現負壓,導致吸油不足。模擬連桿機構用于仿真研究分析時,模擬實際運動過程中隨著發動機噴管角度改變引起的有效力臂改變。
根據火箭發動機在不同飛行階段的實際使用工況,可使系統工作在泵控模式或閥控模式,以滿足系統的使用要求,并減小系統能量損耗。
2 數學模型分析
基于高速開關閥的電靜液作動器系統中,當系統需要作動器快速響應時,使用高速開關閥進行高速開、關控制作動器的運動速度和方向,而電機僅作為動力元件使用,工作在恒轉速模式下;當系統不需要作動器快速響應時,通過調節泵的轉速,來調節泵的流量,從而控制作動器的運動速度;而通過控制高速開關閥的開、關順序,來控制作動器的運動方向,這時泵又是控制元件。無刷直流電機的數學模型為[6]:
(1)
式中,Uc—— 電樞電壓,V
Kc—— 反電動勢系數,V/(rad·s-1)
ω—— 電機輸出角速度,rad/s
L—— 電樞繞組電感,H
i—— 電樞電流,A
R—— 電樞繞組電阻,Ω
Kt—— 轉矩系數,N·m/A
J—— 電機轉子轉動慣量,kg·m2
Bm—— 轉動摩擦阻尼系數,N·s/rad
Tf—— 負載轉矩,N·m
斜盤式柱塞泵的數學模型為:
(2)
式中,Qt—— 泵的平均流量,m3/s
d—— 柱塞直徑,m
Z—— 柱塞數量
R—— 柱塞分布圓半徑,m
γ—— 斜盤傾角,rad
高速開關閥閥芯運動微分數學模型:
(3)
式中,Fmag—— 電磁吸力,N
m—— 閥芯及復位彈簧質量,kg
Bd—— 閥芯運動阻尼系數,N·s/m
Kd—— 復位彈簧剛度,N/m
Fw—— 閥芯穩態液動力,N
Ft—— 閥芯瞬態液動力,N
Fk—— 閥芯液壓卡緊阻力,N
G—— 閥芯重力,N
(4)
式中,N—— 線圈匝數
ixq—— 線圈的電流,A
μ0—— 空氣磁導率,H/m
δ—— 氣隙長度,m
Sa—— 銜鐵有效面積
電磁鐵電路數學模型:
(5)
式中,Uxq—— 線圈電壓,V
Rxq—— 線圈電阻,Ω
Lxq—— 線圈電感
一般來說,我會把日常生活安排得很愜意:早上6點在我最喜歡的咖啡館喝一杯拿鐵,和助手見面,回復郵件。上午10點左右去游泳,吃一頓早午飯,小睡一會兒,然后就去拍照。晚上和朋友在河邊抽著雪茄結束一天的生活。
電磁鐵電感數學模型:
(6)
3 仿真模型及參數設置
根據無刷直流電機的數學模型建立的仿真分析模型如圖4所示。電機的調速采用經典的PID控制器,對其進行速度調節。
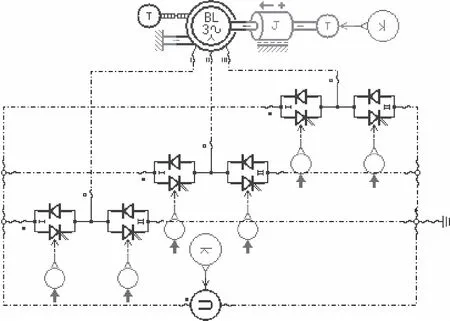
圖4 無刷直流電機仿真分析模型
本項目高速開關閥的驅動控制采用單電壓的脈寬調制式,該驅動方式具有電路結構簡單,響應速度快、保持電流小等優點。根據數學模型建立高速開關閥的仿真分析模型如圖5所示。
最終根據子元件模型,建立電靜液作動器的整體仿真模型,如圖3所示。仿真分析的具體主要參數:無刷直流電機額定電壓56 V,額定功率750 W,額定轉速7000 r/min;斜盤式柱塞泵額定壓力21 MPa,額定流量0.3 mL/r;高速開關閥額定壓力21 MPa,閥芯直徑8 mm,閥芯位移0.3 mm,閥芯質量2.65 g,開啟、關閉時間均不大于0.5 ms。發動機俯仰和偏航通道姿態控制的主要技術指標:發動機在灌注狀態下的轉動慣量J為32.7 kg·m2;游機擺軸、軸承、動密封的摩擦力矩為41.2 N·m;轉動角度范圍不大于±4.0°;輸入信號幅值δc為0.2°的對數頻率特性:幅值小于-3 dB時,頻響不小于10 Hz;相位滯后90°時,頻響不小于8 Hz。
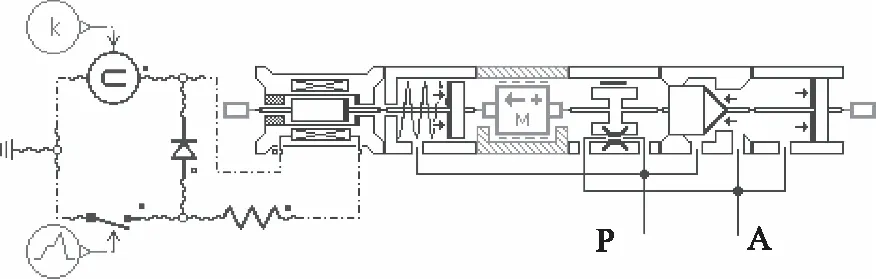
圖5 高速開關閥的仿真分析模型
4 仿真結果分析
目前高速開關閥的外部控制信號,多采用脈寬調制式(PWM),根據高速開關閥的極限響應頻率不同,PWM的基頻一般在5~100 Hz;PWM的占空比則由輸入信號與角度反饋信號相減,然后進行PID計算得出占空比的大小,從而形成閉環控制。由于高速開關閥的開啟關閉響應時間相對控制電路的響應時間來說還是太慢,故占空比的可調范圍一般只有10%~90%左右,超出此范圍,高速開關閥將處于半開或半關狀態。
針對這種情況,下面進行3種控制算法的對比仿真分析。第一種算法,輸入信號與角度反饋進行比較,并根據負載角速度和角加速度進行預測計算高速開關閥的開啟、關閉提前量,控制模型如圖6所示。
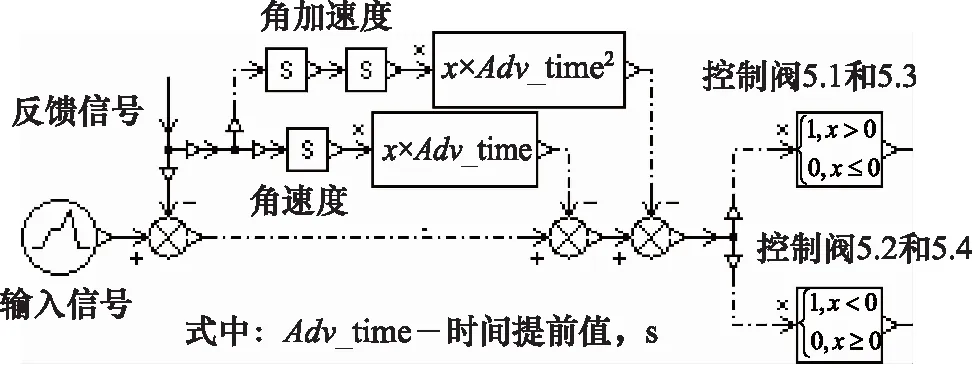
圖6 時間預測的非線性控制模型
第二種算法是在第一種算法的基礎上,考慮高速開關閥的開啟、關閉存在一定的響應滯后,故占空比的調節范圍存在一定死區,如圖7所示。
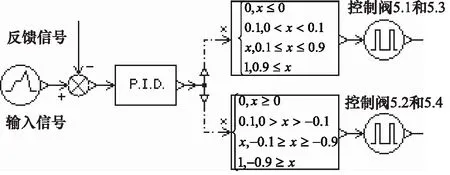
圖7 帶死區的PID非線性控制模型
第三種算法為經典的PID控制算法,不考慮高速開關閥占空比死區的問題,控制模型如圖8所示。
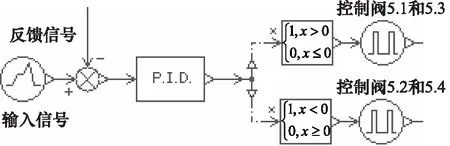
圖8 常規PID的非線性控制模型
4.1 階躍響應仿真分析
對于3種算法的參數調定,均按階躍響應滿足超調量σp≤20%,調節時間(穩態誤差不大于±2%所需要的時間)ts≤0.2 s作為標準。得到的仿真結果如圖9所示。
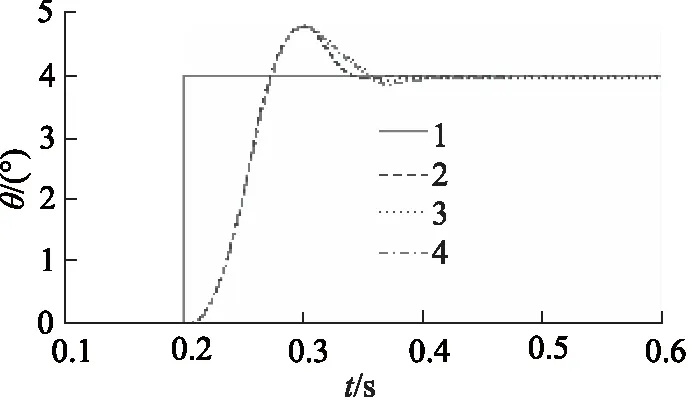
1.輸入信號 2.時間預測模型 3.帶死區PID算法 4.常規PID算法圖9 階躍輸入響應曲線
從圖9中曲線可知,3種算法的仿真結果其超調量σp≤20%,調節時間ts為0.18 s左右時均能滿足設計要求。
4.2 斜坡輸入響應仿真分析
輸入斜率為20°/s的斜坡輸入信號,進行仿真計算,得到的響應曲線如圖10所示。從圖10中可知,時間預測模型的跟隨性最好;其他兩種算法跟隨情況基本一致,但是都存在過沖的情況,跟隨性較差。
4.3 正弦輸入響應仿真分析
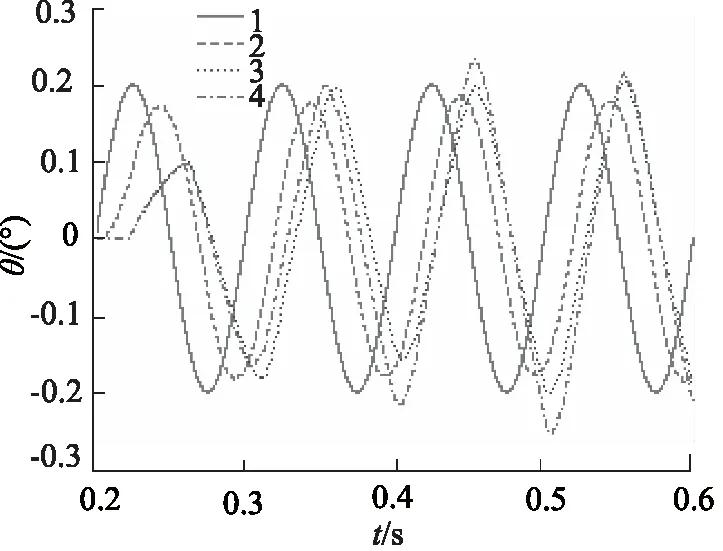
根據階躍響應的調節時間,初步選取正弦輸入信號的頻率為5 Hz,幅值為額定轉角范圍的±5%(0.2°),進行仿真分析,得到的響應曲線如圖11所示。從圖中可知,時間預測模型的跟隨性最好,幅值下降到-0.39 dB左右,相位滯后不大于30°;其他兩種算法幅值超過了+2 dB,相位滯后不大于58°。

1.輸入信號 2.時間預測模型 3.帶死區PID模型 4.常規PID模型圖10 斜坡輸入響應曲線

1.輸入信號 2.時間預測模型 3.帶死區PID算法 4.常規PID算法圖11 5 Hz正弦輸入響應曲線
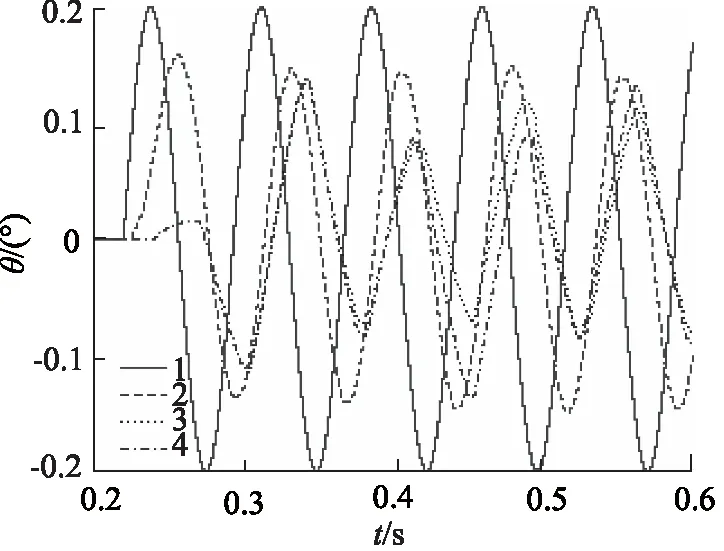
增加輸入正弦信號的頻率到10 Hz,幅值保持不變,得到的仿真分析曲線如圖12所示。從圖中可知,時間預測模型的跟隨性最好,幅值下降到-1.32 dB左右,相位滯后不大于70°;帶死區PID算法幅值下降到-0.05 dB,相位滯后大于90°;常規PID算法幅值達+1.35 dB左右,相位滯后大于90°。
1.輸入信號 2.時間預測模型 3.帶死區PID算法 4.常規PID算法圖12 10 Hz正弦輸入響應曲線
增加輸入正弦信號的頻率到13.6 Hz,幅值保持不變,得到的仿真分析曲線如圖13所示。從圖13中可知,時間預測模型的跟隨性最好,幅值下降到-2.91 dB 左右,相位滯后仍然≤90°;其他2種算法幅值下降已經超過了-3 dB,相位滯后>90°。
1.輸入信號 2.時間預測模型 3.帶死區PID算法 4.常規PID算法圖13 13.6 Hz正弦輸入響應曲線
5 結論
通過研究基于高速開關閥的電靜液作動器在某型號火箭二級主發動機俯仰與偏航通道姿態控制上的應用,提出了系統的整體設計方案,建立了無刷直流電機、斜盤式柱塞泵以及高速開關閥等子系統的數學模型,最終完成了全系統的建模和仿真。通過以上設計與仿真分析可得如下結論:
(1) 基于高速開關閥的電靜液作動器采用時間預測模型進行了系統閉環控制仿真分析,結果表明系統的控制性能完全能夠滿足火箭二級主發動機俯仰與偏航通道姿態控制的要求;
(2) 由于高速開關閥的非線性,采用時間預測模型比采用PID算法具有更高的響應頻率,更好的線性度;
(3) 對于火箭二級主發動機由于燃燒導致轉動慣量減小的應用情況,固定控制參數的調節器難以滿足實際使用要求,必須根據發動機轉動慣量的變化速率,改變調節參數,才能滿足發動機實際使用要求。
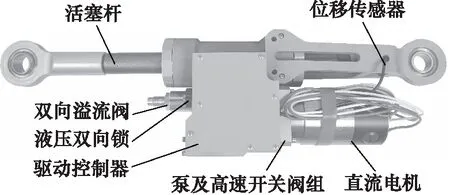
圖14 基于高速開關閥的電靜液作動器
根據完成的設計與仿真計算結果,完成了圖紙設計,并加工、裝配完成了電靜液作動器的樣機(見圖14所示)。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
電子制作(2018年11期)2018-08-04 03:25:42
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車與新動力(2015年1期)2015-02-27 12:11:01