永磁同步電機調速系統的非線性魯棒滑模控制
2020-07-14 05:39:29侯利民申鶴松李蘊倬李秀菊
電機與控制學報 2020年6期
侯利民 申鶴松 李蘊倬 李秀菊
摘 要:針對表面式永磁同步電機(SPMSM)調速系統中存在電機內部參數攝動和外部負載擾動等不確定因素時影響調速系統魯棒性的問題,提出帶擴張狀態觀測器(ESO)滑模速度控制的永磁同步電機調速系統H∞魯棒整形電流控制算法。首先,基于端口受控耗散哈密頓(PCHD)標稱數學模型設計了整形控制器,在此基礎上考慮參數攝動和負載擾動構建了H∞魯棒電流控制器,由此得到了H∞魯棒整形電流控制器,改善了電流控制的動態品質和魯棒性;然后,采用滑模控制(SMC)設計了速度控制器,利用擴張狀態觀測器估計綜合干擾項d^,從而得到q軸期望的電流iq,間接改善滑模固有抖振問題的同時進一步增強了調速系統中存在綜合干擾因素時的魯棒性。最后,通過仿真和半實物仿真實驗驗證了所提出控制策略的有效性和可行性。
關鍵詞:表面式永磁同步電機;端口受控耗散哈密頓模型;整形控制;H∞魯棒控制;滑模控制;擴張狀態觀測器
DOI:10.15938/j.emc.2020.06.017
中圖分類號:TM 351文獻標志碼:A 文章編號:1007-449X(2020)06-0143-10
Nonlinear robust sliding mode control of permanent magnet synchronous motor speed regulation system
HOU Li-min1, SHEN He-song1, LI Yun-zhuo1, LI Xiu-ju2
(1.Faculty of Electrical and Control Engineering, Liaoning Technical University, Huludao 125105, China;
2.Protection Automation of Power Supply Company in Huludao, Huludao 125000, China)
Abstract:The robustness of the speed regulation system gets worse when there exist uncertainties such as the inner parameter perturbation of the motor and the ourter load disturbance in the surface permanent magnet synchronous motor (SPMSM) speed regulation system. To solve the problem, the H∞ robust shaping current control algorithm of the permanent magnet synchronous motor speed regulation system is proposed based on the sliding mode speed control with an extended state observer (ESO). Firstly, on the basis of the port controlled hamiltonian with dissipation (PCHD) nominal mathematical model, a shaping controller was designed. Then, considering the parameter perturbation and the load disturbance, a H∞ robust current controller was constructed. So a H∞ robust shaping current controller was obtained, which improves the dynamic characteristic and robustness of current control. Secondly, a speed controller was designed by adopting the sliding mode control (SMC), and the ESO was used to estimate the comprehensive disturbance term d^. Thus, the desired current of the q axis iq is obtained, which suppresses the inherent chattering problem of sliding mode control indirectly and enhances the robustness of the speed regulation system in the presence of comprehensive interference factors further. Finally, the effectiveness and availability of the control strategy were verified by simulation and the hardware in the loop simulation experiment.
Keywords:surface permanent magnet synchronous motor; port controlled hamiltonian with dissipation model; shaping control; H∞ robust control; sliding mode control; extended state observer
0 引 言
永磁同步電機(permanent magnet synchronous motor,PMSM)因其具有結構緊湊、高效率、高力矩慣量和高功率密度等突出優點,在加工制造業、新能源汽車和家電等領域都有著廣泛的應用。由于PMSM是一類多變量、強耦合、非線性系統,當系統中存在參數攝動或負載擾動等不確定因素時,傳統的矢量控制已難以滿足電機調速系統的高性能控制要求。因此,一些高性能控制策略,如滑模控制、自適應控制、自抗擾控制、魯棒控制等被廣泛應用到了PMSM調速系統中。
魯棒控制是針對系統中存在的不確定因素問題而提出的先進控制方法[1-5]。當從能量角度研究電機調速系統的魯棒性時,經常用到的是端口受控耗散哈密頓(port controlled hamiltonian with dissipation,PCHD)系統理論。該理論是研究非線性系統的一種重要工具,已有學者們把這一理論應用到了PMSM調速系統中[6-9]。文獻[9]針對電流環上的外部不確定性干擾(電壓波動),在PCHD模型基礎上設計了id、iq的H∞魯棒整形電流控制器,提高了電流控制的魯棒性。但其只考慮了電流環中的特定干擾,而沒有考慮負載擾動的影響。負載擾動是影響調速系統性能的關鍵因素之一。當系統中存在負載擾動等不確定因素時,可能導致轉速跟蹤誤差變大。
滑模控制能夠克服系統的不確定性, 對干擾和未建模動態具有很強的魯棒性, 而且可以通過滑動模態的設計獲得滿意的動態品質,尤其是對非線性系統的控制具有良好的控制效果,且具有響應迅速、控制設計簡單等優點[10-11]。但是,在控制過程中由于采用了開關信號,不可避免地會存在抖振。為了抑制抖振對系統性能的影響,有學者先后提出了一些改進的控制策略。文獻[12]采用了冪次函數fal(S,α,δ),明顯地減小了PMSM的轉矩脈動。文獻[13]采用變系數雙冪次趨近律和非奇異快速終端滑模面相結合,提出了連續的控制律,抑制了抖振。
由于單一的控制策略各有其自身的優缺點,除了通過改變自身控制策略來克服其缺點的方法以外,還可以通過多個控制方法的結合來彌補各自缺陷。如滑模自抗擾控制[14]、魯棒自適應控制[15-17]、魯棒自適應滑模控制等。文獻[18]在無需參數整定的自抗擾控制結構基礎上,針對易受到轉動慣量、負載轉矩突變及摩擦力等系統擾動影響時,其控制策略難以達到高穩態準確度要求的問題,結合滑模控制算法的優勢,提出了一種PMSM滑模自抗擾控制策略,使控制器保持原自抗擾控制器優點的同時,提高了系統內部的抗干擾能力。文獻[19]針對齒槽轉矩、電流測量誤差和磁通諧波引起的轉矩脈動,采用魯棒迭代學習的控制方法,在減小了周期性轉矩脈動的同時,利用自適應算法估計了系統的參數變化和外部干擾并補償到魯棒迭代學習速度控制器中,消除了系統干擾并抑制了滑模抖振。
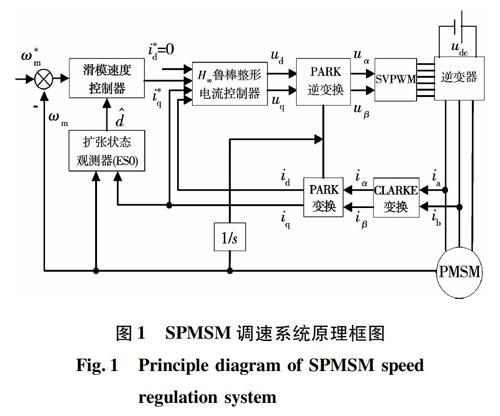
本文針對表面式永磁同步電機(surface permanent magnet synchronous motor,SPMSM)在運行過程中存在的參數攝動和負載擾動的影響,從提高系統的魯棒性和動態品質的角度,設計了帶擴張狀態觀測器(extended state observer,ESO)滑模速度控制的永磁同步電機調速系統H∞魯棒整形電流控制算法。調速系統電流環控制器采用H∞魯棒整形電流控制器取代PI調節器,得到電流控制信號ud、uq。速度環設計了滑模速度控制器,并利用擴張狀態觀測器估計綜合干擾項d^,得到q軸期望的電流iq。最后通過仿真和半實物仿真實驗驗證了本文方法的有效性。
1 SPMSM的PCHD數學模型
SPMSM 在d-q旋轉坐標系上考慮參數攝動和負載擾動建立的數學模型[20]為:
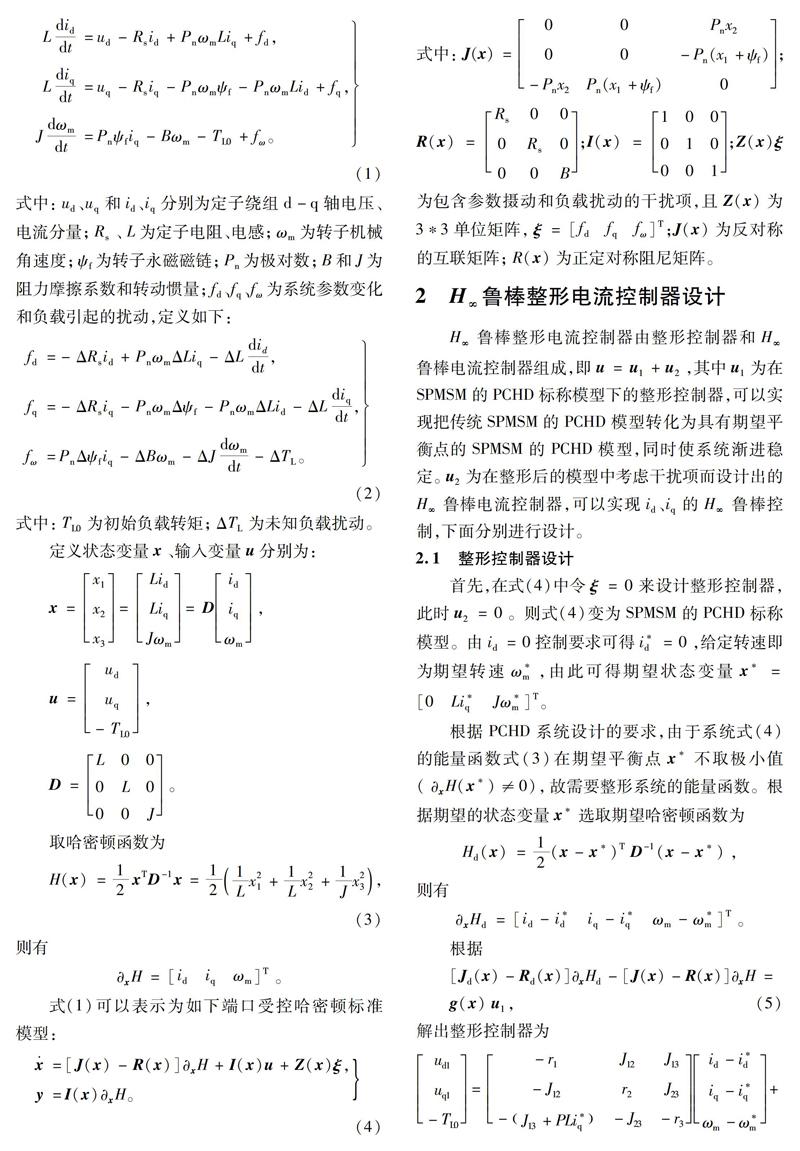
式中:ud、uq和id、iq分別為定子繞組d-q軸電壓、電流分量;Rs、L為定子電阻、電感;ωm為轉子機械角速度;ψf為轉子永磁磁鏈;Pn為極對數;B和J為阻力摩擦系數和轉動慣量;fd、fq、fω為系統參數變化和負載引起的擾動,定義如下:
式中:TL0為初始負載轉矩;ΔTL為未知負載擾動。
定義狀態變量x、輸入變量u分別為:
則有
xH=[idiqωm]T。
式(1)可以表示為如下端口受控哈密頓標準模型:
式中:J(x)=00Pnx200-Pn(x1+ψf)-Pnx2Pn(x1+ψf)0;R(x)=Rs000Rs000B;I(x)=100010001;Z(x)ξ為包含參數攝動和負載擾動的干擾項,且Z(x)為3*3單位矩陣,ξ=[fdfqfω]T;J(x)為反對稱的互聯矩陣;R(x)為正定對稱阻尼矩陣。
2 H∞魯棒整形電流控制器設計
H∞魯棒整形電流控制器由整形控制器和H∞魯棒電流控制器組成,即u=u1+u2,其中u1為在SPMSM的PCHD標稱模型下的整形控制器,可以實現把傳統SPMSM的PCHD模型轉化為具有期望平衡點的SPMSM的PCHD模型,同時使系統漸進穩定。u2為在整形后的模型中考慮干擾項而設計出的H∞魯棒電流控制器,可以實現id、iq的H∞魯棒控制,下面分別進行設計。
2.1 整形控制器設計
首先,在式(4)中令ξ=0來設計整形控制器,此時u2=0。則式(4)變為SPMSM的PCHD標稱模型。由id=0控制要求可得id=0,給定轉速即為期望轉速ωm,由此可得期望狀態變量x=[0LiqJωm]T。
根據PCHD系統設計的要求,由于系統式(4)的能量函數式(3)在期望平衡點x不取極小值(xH(x)≠0),故需要整形系統的能量函數。根據期望的狀態變量x選取期望哈密頓函數為
解出整形控制器為
對于Ja(x)和Ra(x)的參數選擇問題,由于系統平衡時有Pnψfiq-Bωm-TL0=0,所以令J13=-PLiq,J23=r3=0;為簡單起見,令J12=0。根據耗散性定義,整形后的系統是可阻尼配置的期望耗散哈密頓系統[21]。對于耗散哈密頓系統來說,阻尼系數的大小與能量函數的收斂速度有關。在不影響系統穩定性的前提下,選擇相對大的阻尼系數r1、r2會提高響應速度。
1)加減載+參數攝動半實物仿真實驗。
采集到的n、idq、iabc曲線如圖6所示。
從圖6中可以看出,圖6(a)、圖6(b)在加減載瞬間,方案一產生的轉速波動較大,而方案二產生波動較小,且逐漸恢復。圖6(c)~圖6(f)中,與方案一相比,方案二的電流變化比較平滑。因此,當負載變化時方案二具有更強的抗負載擾動能力。當參數發生變化時,方案二對應的速度和電流曲線無明顯變化,體現了控制器對參數攝動的強魯棒性。最終,可以得出半實物仿真實驗與仿真結果保持一致的結論。
2)升降速和正反轉半實物仿真實驗。
采集到的n曲線如圖7、圖8所示。
從圖7、圖8中可以看出,方案一在升降速和正反轉瞬間波動較大,而方案二的跟蹤曲線比較平滑,體現了本文控制策略的優良動態品質。從上述分析可以得出,半實物仿真實驗所得的結果與仿真保持一致。
5 結 論
本文在矢量控制系統基礎上進行了魯棒控制方法的研究,提出了一種基于滑模速度控制和H∞魯棒整形電流控制的雙閉環控制策略。在電流環考慮參數攝動和負載擾動設計了H∞魯棒整形電流控制器,在速度環采用冪次函數設計了滑模速度控制器,其中綜合干擾項d^由ESO實時觀測,并進行前饋補償。仿真和半實物仿真實驗結果表明,與傳統PI控制相比,本文提出的控制策略能有效抑制負載擾動對系統性能的影響,且具有對參數攝動的強魯棒性,同時能夠改善系統的動態品質。
參 考 文 獻:
[1] LIU Y H, CAO G Z, TANG S X, et al. Energy-based stabilisation and HSymboleB robust stabilization of stochastic non-linear systems[J]. IET Control Theory & Applications, 2018, 12(2): 318.
[2] 藍益鵬, 陳其林, 胡學成. 磁懸浮永磁直線電動機控制系統非脆弱魯棒控制的研究[J]. 電工技術學報, 2016, 31(7): 26.
LAN Yipeng, CHEN Qilin, HU Xuecheng. Research on non-fragile robust control for magnetic levitation permanent magnet linear motor control system[J]. Transactions of China Electrotechnical Society, 2016, 31(7): 26.
[3] ZOU Y, HUO W. Nonlinear robust controller for miniature helicopters without singularity[J]. IEEE Transactions on Aerospace and Electronic Systems,2017,53(3):1402.
[4] 周湛清, 夏長亮, 陳煒, 等. 具有參數魯棒性的永磁同步電機改進型預測轉矩控制[J]. 電工技術學報, 2018, 3(5): 965.ZHOU Zhanqing, XIA Changliang, CHEN Wei, et al. Modified predictive torque control for PMSM drives with parameter robustness[J]. Transactions of China Electrotechnical Society, 2018, 3(5): 965.
[5] 王琦, 陳龍勝. 非仿射純反饋不確定系統預設性能魯棒自適應控制[J]. 電機與控制學報, 2017, 21(2): 109.WANG Qi, CHEN Longsheng. Prescribed performance adaptive robust control for a class of uncertain non-affine pure feedback system[J]. Electric Machines and Control, 2017, 21(2): 109.
[6] 侯利民,王巍. 表面式永磁同步電機無源非奇異快速終端滑模控制[J].電工技術學報, 2014, 29(11): 45.HOU Limin, WANG Wei. Passivity-based control and nonsingular fast terminal sliding mode control for SPMSM[J]. Transactions of China Electrotechnical Society, 2014, 29(11): 45.
[7] 吳忠強, 吳昌韓, 趙立儒, 等. 基于哈密頓函數的永磁同步電機混沌系統魯棒控制[J]. 物理學報, 2015, 64(9): 1.WU Zhongqiang, WU Changhan, ZHAO Liru, et al. Robust control for permanent magnet synchronous motors based on hamiltonian function[J]. Acta Physica Sinica, 2015, 64(9): 1.
[8] 符曉玲, 劉旭東. 基于自適應反步法和端口受控哈密頓理論的永磁同步電機控制[J]. 電機與控制應用, 2016, 43(10): 35.FU Xiaoling, LIU Xudong. Control of permanent magnet synchronous motor based on adaptive backstepping method and port controlled hamiltonian theory[J]. Electric Machines & Control Application, 2016, 43(10): 35.
[9] 吳忠強, 吳昌韓, 賈文靜, 等. 基于能量函數的永磁同步電機無速度傳感器控制[J]. 中國機械工程, 2016, 27(5): 585.WU Zhongqiang, WU Changhan, JIA Wenjing, et al. Speed sensorless H∞ control for PMSM based on energy function[J]. China Mechanical Engineering,2016, 27(5): 585.
[10] HOU Limin, WANG Longyang, WANG Huaizhen. SMC for systems with matched and mismatched uncertainties and disturbances based on NDOB[J].Acta Automatica Sinica, 2017,43(7):1257.
[11] 黃宴委, 劉喆怡, 熊少華, 等. 基于二階終端滑模優化的電流環滑模控制[J]. 電機與控制學報, 2018, 22(3): 74.HUANG Yanwei, LIU Zheyi, XIONG Shaohua, et al. Sliding mode control for current loop by second order terminal sliding mode[J]. Electric Machines and Control, 2018, 22(3): 74.
[12] 李國飛, 滕青芳, 王傳魯, 等. 應用滑模控制的四開關逆變器PMSM系統FCS-MPC策略[J]. 浙江大學學報, 2017, 51(3): 620.LI Guofei, TENG Qingfang, WANG Chuanlu, et al. FCS-MPC strategy with sliding mode control for PMSM systems driven by four-switch inverters[J]. Journal of Zhejiang University, 2017, 51(3): 620.
[13] 冒建亮, 李奇, 朱海榮. 一種連續非奇異快速終端滑模控制方法[J]. 控制與決策, 2016, 31(10): 1873.MAO Jianliang, LI Qi, ZHU Hairong. A continuous nonsingular fast terminal sliding mode control method[J]. Control and Decision, 2017, 31(10): 1873.
[14] DINH H T, TRUONG D K, NGUYEN T H, et al. Active disturbance rejection control design for Integrated guidance and control missile based SMC and extended state observer[C]//2017 International Conference on System Science and Engineering, July 21-23, 2017, Ho Chi Minh City, Vietnam. 2017: 476.
[15] 陶瑞超, 馬杰, 趙輝. 基于間接自適應魯棒的永磁同步電機電流控制器設計[J]. 控制理論與應用, 2017, 34(3): 296.
TAO Ruichao, MA Jie, ZHAO Hui.Current controller design of permanent magnet synchronous motor based on indirect adaptive robust control[J]. Control Theory & Applications, 2017, 34(3): 296.
[16] 史震, 何晨迪. 高超聲速飛行器姿態跟蹤魯棒自適應控制[J]. 電機與控制學報, 2018, 22(7): 18.SHI Zhen, HE Chendi. Robust adaptive attitude control for hypersonic reentry vehicle[J]. Electric Machines and Control, 2018, 22(7): 18.
[17] 王一光, 李曉杰, 陳興林. 基于永磁直線同步電機的光刻機掩模臺魯棒自適應神經網絡控制[J]. 電工技術學報, 2016, 31(6): 38.WANG Yiguang, LI Xiaojie, CHEN Xinglin. A robust adaptive neural network control method based on permanent magnetic linear synchronous motor for the reticle stage of lithography[J]. Transactions of China Electrotechnical Society,2016,31(6):38.
[18] 黃慶, 黃守道, 馮垚徑, 等. 基于變結構自抗擾永磁電動機速度控制系統[J]. 電工技術學報, 2015, 30(20): 31.HUANG Qing, HUANG Shoudao, FENG Yaojing,et al.Variable structure based active-disturbance rejection controller for speed control system of permanent magnet synchronous motor[J].Transactions of China Electrotechnical Society,2015,30(20):31.
[19] LIU Jing, LI Hongwen, DENG Yongting. Torque ripple minimization of PMSM based on robust ILC via adaptive sliding mode control[J].IEEE Transactions on Power Electronics,2018,33(4):3655.
[20] 劉旭東, 李珂, 張奇, 等. 基于非線性擾動觀測器的永磁同步電機單環預測控制[J]. 中國電機工程學報, 2018, 38(7): 2154.LIU Xudong, LI Ke, ZHANG Qi, et al. Single-loop predictive control of PMSM based on nonlinear disturbance observers[J]. Proceedings of the CSEE, 2018, 38(7): 2154.
[21] 侯利民, 王巍. 無速度傳感器的表面式永磁同步電機無源控制策略[J]. 控制與決策, 2013, 28(10): 1581.HOU Limin, WANG Wei. Speed sensorless system of passivity-based control strategy for SPMSM[J]. Control and Decision, 2013, 28(10): 1581.
(編輯:邱赫男)
收稿日期: 2018-07-08
基金項目:遼寧省自然科學基金計劃項目(201602350)
作者簡介:侯利民(1976—),男,博士,副教授,研究方向為電力電子與電力傳動、電機控制;
申鶴松(1988—),男,碩士,研究方向為電機控制;
李蘊倬(1996—),女,碩士研究生,研究方向為電機控制;
李秀菊(1977—),女,碩士,研究方向為電力系統保護。
通信作者:申鶴松