基于多傳感器的數據融合算法研究
2020-07-14 08:35:56敬如雪高玉琢
現代電子技術 2020年10期
關鍵詞:多傳感器
敬如雪 高玉琢
摘? 要: 文中提出基于多傳感器的數據融合算法,該融合方法先對數據進行一致性檢驗,剔除傳感器測量的異常數據,得到最優數據集;其次以支持度與自適應加權估計理論為基礎,提高融合數據的精確度,該算法不需要提前知道任何先驗條件。實際應用結果驗證了算法的準確性,并進行了Matlab仿真。仿真結果表明,此方法計算簡便,可以獲得比有限個傳感器的算術平均值與傳統的自適應加權算法融合值更精確的估計結果,具有較高的可靠性和抗干擾性,可用于測量結果具有正態分布特性的多傳感器測量系統。
關鍵詞: 多傳感器; 數據融合; 數據一致性; 支持度; 自適應加權算法; 仿真分析
中圖分類號: TN919?34? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A? ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)10?0010?04
Research on data fusion algorithm based on multi?sensor
JING Ruxue, GAO Yuzhuo
(School of Information Engineering, Ningxia University, Yinchuan 750000)
Abstract: The data fusion algorithm based on multi?sensor is proposed in this paper. In this fusion method, the consistency of the data is firstly checked, and the abnormal data measured by the sensor is eliminated to obtain the optimal data set. The accuracy of the fusion data is improved based on the support degree and self?adaptive weighted estimation theory. The application of the algorithm does not need to know any prior conditions in advance. The practical application results verify the accuracy of the method, by which the Matlab simulation is carried out.? The simulation results show that the method is simple to calculate and can obtain more accurate estimation results than that of the fusion value of the arithmetic mean value of a finite number of sensors with the traditional self?adaptive weighting algorithm. It has the higher reliability and anti?interference and can be used in multi?sensor measurement systems with normal distribution characteristics.
Keywords: multi?sensor; data fusion; data consistency; support degree; self?adaptive weighting calculation; simulation analysis
0? 引? 言
物聯網作為自動化和智能化的融合體,它的核心是“互聯網+傳感網”, 傳感器具有低能耗、低成本、高精度和集成化的特點[1?3],各類傳感器是傳感網中的必備節點。但由于傳感器本身精度和工藝靈敏度、傳輸誤差、高斯噪聲以及周圍環境對測量數據的干擾影響,在實際情況下的數據測量中,傳感器所處的位置不同,對物體同一屬性參數的測量數據有不同程度的偏差。為減少測量偏差,提高數據精度,一方面,需要提升傳感器硬件本身的測量精度;另一方面,利用算法優化,對測量的原始數據集進行去噪處理,可得到較高的數據融合結果,且抗干擾能力較強。陳彥如等人研究設計CMOS溫度傳感器[4]的工作溫度范圍是-125~-45 ℃,其測量精度誤差絕對值不超過1.5 ℃。本文在文獻[5]的基礎上,研究一種新的參數估計方法,此方法以自適應加權估計理論為基礎,對多傳感器采集到的原始數據進行一致性檢驗,找到數據最優融合集;其次通過關系矩陣,找到支持度最高的傳感器,以其測量數據代替異常數據,進行自適應加權數據融合來估計出一個最優參數。該算法不僅計算過程簡單,而且可以充分利用實驗中所有的測量數據,并用Matlab進行了實例仿真。
1? 數據一致性檢驗
對多傳感器測量的原始數據進行融合之前,利用數據探測技術中的分布圖法[6]找到并剔除異常數據[7]。分布圖中反映數據分布結構的主要參數有:中位數TM、上分位數FU、下分位數FL和分位數離散度dF。設對物體的某一性能指標的檢測采用N個傳感器彼此獨立地進行參數測量,按照測量參數從小到大的順序進行排列,得到一組檢測序列:T1,T2,…,Tn-1,Tn。其中T1是檢測序列的下限,Tn是檢測序列的上限。定義中位數TM為:
[TM=Tn2+Tn2+12]? (1)
上五分位數FU為區間[TM,Tn]的中位數,下五分位數FL為[T1,TM]的中位數。分位數離散度為:
[dF=FU-FL]? ? ?(2)
設定與中位數的距離大于[α?dF]的數據為異常數據,即無效數據的判斷區間為:
[Ti-TM>α?dF] (3)
式中:[α]為常數,一般取值為0.5,1.0,2.0等;[i]的取值為1,2,3,…,n-1,n。當檢測序列的異常數據被找到且被剔除之后,剩下的數據構成最優數據集。
2? 相關支持度
在數據融合集中,數據Xi和Xj分別是第i個傳感器和第j個傳感器的檢測數據,且服從高斯分布,以其概率分布曲線Pi(x)和Pj(x)作為各傳感器的特性函數[8],xi,xj記作Xi,Xj的一次觀測值,σi,σj為其方差,引進置信距離測度,便于直觀反映xi與xj之間的偏差。
[dij=2xixjpi(xxi)dx] (4)
[dji=2xjxipj(xxj)dx] (5)
式中:dij為第i個傳感器與第j個傳感器所測數據之間的置信距離測度。
[pi(xxi)=12πσiexp-12x-xiσi2] (6)
[pj(xxj)=12πσjexp-12x-xjσj2] (7)
假設最優數據集有M個數據,則由置信距離測度dij(i,j=1,2,…,m)構成置信矩陣Dm:
[Dm=d11d12…d1md21d22…d2m????dm1dm2…dmm] (8)
給出融合上限θij,令關系系數rij的取值為:
[rij=1,? ? ?dij≤θij0,? ? dij>θij] (9)
當rij=1,表示第i個傳感器支持第j個傳感器,反之,rij=0,則第i個傳感器不支持第j個傳感器;當rij=1且rji=1,則表明第i個傳感器與第j個傳感器相互支持。N個具有相同精度的傳感器,在測量數據進行數據融合后,可將參數精度提高到一個傳感器N1/2倍。通過關系矩陣Rm可找到支持度最高的傳感器,其測量的數據稱為超數據,用超數據代替被剔除的異常數據,最后進行動態加權融合估計。關系矩陣Rm如下:
[Rm=r11r12…r1mr21r22…r2m????rm1rm2…rmm] (10)
即關系矩陣Rm的第i列之和為第i個傳感器被其他傳感器支持的支持度。傳感器支持度的計算公式為:
[si=j=1mrji,? i=1,2,…,m] (11)
3? 自適應加權融合估計算法
自適應加權融合估計算法的思想:基于總均方誤差最小的前提下,依據每個傳感器實時測量到的數據,動態為各傳感器分配所對應的最優加權因子Wi(i=1,2,…,n),其中傳感器的方差越大,對應所分配的權值越小,以求得最終的估計值[X]貼近真實值X。假設:采用n個傳感器測量某事物的同一特性參數,σ1,σ2,…,σn是n個傳感器的方差,測量的理論值為X,每個傳感器的檢測數據為Xi(i=1,2,…,n),各檢測數據彼此相互獨立且是X的無偏估計,估計后的參數就是最終所求的融合結果。其中[X]和Wi必須滿足:
[X=i=1nWiXi] (12)
由式(12)、式(13)推導出總均方誤差[σ2]:
[i=1nWi=1] (13)
[σ2=Ei=1nW2i(X-Xi)2=i=1nW2iσ2i] (14)
根據多元函數求極值理論,求得在總均方誤差σ2最小的條件,各傳感器所對應的權值為Wi(i=1,2,…,n),當方差越小時,其對應的權值越大。最小總均方誤差[σ2min]為:
[σ2min=1i=1n1σ2i]? ? ?(15)
其對應的每個傳感器的加權因子[Wi]為:
[Wi=1σ2ik=1n1σ2k,? ?i=1,2,…,n]? (16)
通過式(16)對多個傳感器相應權值Wi的計算,代入式(12),進而可得到最終融合結果[X]。
4? 算法舉例
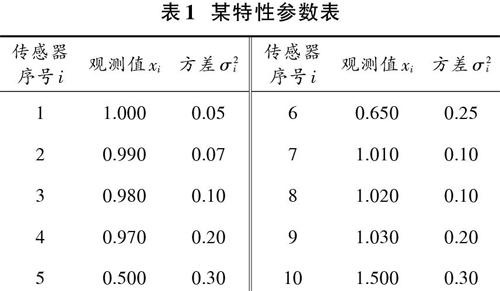
基于文獻[9]中的數據,采用10個同種傳感器測量物體的同一特性參數,指標參數的實際值為1.000,測量到的原始數據如表1所示。
序號i 觀測值xi 方差[σ2i] 1 1.000 0.05 6 0.650 0.25 2 0.990 0.07 7 1.010 0.10 3 0.980 0.10 8 1.020 0.10 4 0.970 0.20 9 1.030 0.20 5 0.500 0.30 10 1.500 0.30 ]
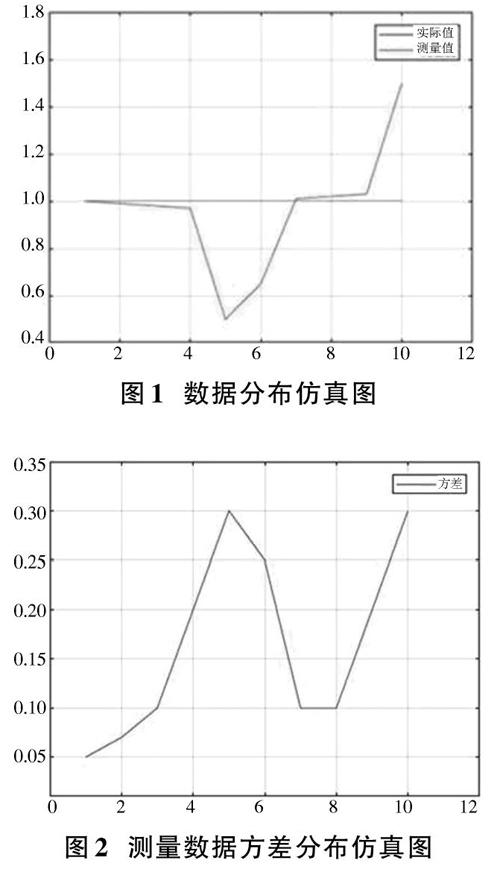
實際值與測量值的分布特征仿真圖如圖1所示,測量值對應的方差分布仿真圖如圖2所示。
對10個傳感器同一時刻所采集到的樣本數據進行數據一致性檢驗。先對原始數據按從小到大順序排序得到:0.500,0.650,0.970,0.980,0.990,1.000,1.010,1.020,1.030,1.500。利用式(1)求得中位數:TM=(0.990+1.000[)2]=0.995,由式(2)知,分位數的離散度dF=1.005-0.965=0.04,此次[α]取2.0,無效數據的判斷區間為[Ti-0.995]>0.08,距離大于0.08的數據為異常數據,距離越大,則表明此傳感器的數據采集準確率越低;反之,傳感器的數據測量準確率越高。經過計算,5號、6號及10號傳感器的數據與中位數的偏差分別為0.495,0.395及0.505,均遠大于0.08,視為異常數據進行剔除,剩下的參數組成最優數據集{x1,x2,x3,x4,x7,x8,x9},假設有一變量Yi服從高斯分布,令y1=x1,y2=x2,y3=x3,y4=x4,y5=x7,y6=x8,y7=x9,數據集變成{y1,y2,y3,y4,y5,y6,y7},且使融合上限θij=0.07,則置信矩陣D7和關系矩陣R7如下:
[D7=00.040.070.110.040.070.110.0300.030.060.060.090.120.050.0300.030.080.100.130.050.040.0200.070.090.110.030.050.080.1000.030.050.050.080.100.130.0300.030.050.070.090.110.040.020]? ? ? ? ?[R7=1100100111110011110001111000110011110001111000111]
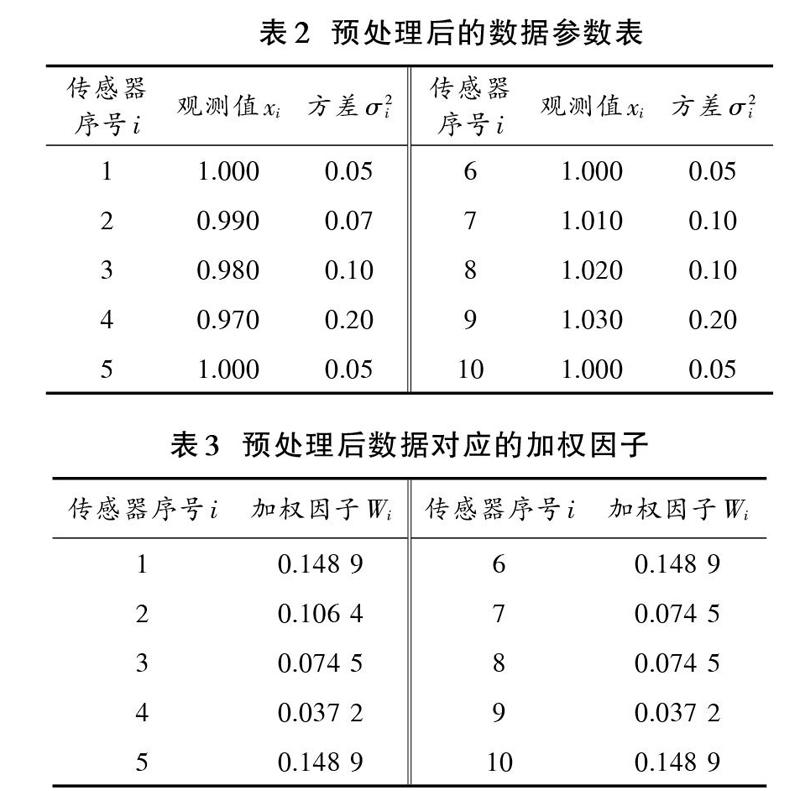
觀察矩陣[R7]得,1號傳感器的支持度為7,為支持度最高的傳感器,2號和7號傳感器的支持度同為5,支持度較次之,3,4,8,9號傳感器支持度都是3,最次之。因此用1號傳感器的超數據代替5號、6號及10號傳感器的測量值,經過處理后的數據參數表如表2所示,依據式(16),求得預處理后各傳感器的加權因子見表3。
數據預處理后得到的方差用Matlab仿真得到圖3。
利用式(12)可計算融合參數:
[X=]1.000[×]0.148 9+0.990[×]0.106 4+0.980[×]0.074 5+0.970[×]0.037 2+1.000[×]0.148 9+1.000[×]0.148 9+1.010[×]0.074 5+1.020[×]0.074 5+1.030[×]0.037 2+1.000[×]0.148 9
=0.999 581
對于10個測量原始數據采用簡單的算術平均法:
[X=] (1.000+0.990+0.980+0.970+0.500+0.650+1.010+1.020+1.030+1.500[)10]=0.965
利用算術平均值法的計算結果是0.965,傳統的自適應加權方法計算出數據融合結果是0.983 0,改進后的自適應加權算法結果是0.999 581。經過數據融合對比發現,采用本文提出的數據融合算法估計的參數精度明顯提高,具有較高的可靠性和魯棒性。
5? 結? 語
本文提出的融合算法不需要知道任何先驗概率,且可充分使用到任何一個傳感器測量到的數據,利用數據的冗余性和互補性進行數據融合,根據計算結果的對比,參數估計準確率提高。在使用多個傳感器對事物同一屬性進行參數測量時,針對測量到的個別異常數據,提出基于數據一致性與支持度的自適應加權估計算法。首先,利用數據一致性對原始數據進行預處理,剔除異常數據,尋找最優數據集;其次,通過支持度選出測量最準確數據的傳感器,用超數據代替異常數據進行下一步的融合估計;最后,在均方差誤差最小的情況下,應用自適應加權算法進行最終的參數估計。自適應加權數據融合算法不僅可以廣泛應用到多傳感器的溫室系統,而且對變速箱故障診斷與風電軸承故障診斷[10?11]及磨礦粒度建模[12]等都有較好的改進效果。
注:本文通訊作者為高玉琢。
參考文獻
[1] 方加娟,鹿艷晶,安鵬.傳感器網絡中的節點能耗監測軟件設計與實現[J].現代電子技術,2017,40(12):53?55.
[2] 黃志武,王曙霞.基于S3C2410的高精度傳感器節點嵌入式設計[J].現代電子技術,2017,40(19):33?36.
[3] 張嚴.基于MEMS海洋湍流傳感器實驗研究[J].現代電子技術,2016,39(1):137?139.
[4] 陳彥如,陳志銘.一種大量程低誤差CMOS溫度傳感器[J].微電子學,2016,46(5):605?607.
[5] 孫田川,劉潔瑜.基于支持度和自適應加權的MEMS陀螺信息融合算法[J].傳感技術學報,2016,29(10):1548?1552.
[6] 張蘭勇,陸晴,耿文杰,等.基于貼近度及分布圖法的數據深度融合算法研究[J].兵器裝備工程學報,2016,37(11):49?55.
[7] 鄭寶周,吳莉莉,李富強,等.基于異常數據預處理和自適應估計的WSN數據融合算法[J].計算機應用研究,2019(9):1?8.
[8] CHEN J, HUANG N, XIONG G, et al. Adaptive weighted mean filtering algorithm based on confidence interval [J]. Journal of Nanjing University of Science & Technology, 2017, 41(3): 307?312.
[9] 萬樹平.基于最小一乘估計的多傳感器信息融合方法[J].計算機工程,2010,36(2):257?259.
[10] JING Luyang, WANG Taiyong, ZHAO Ming, et al. An adaptive multi?sensor data fusion method based on deep convolutional neural networks for fault diagnosis of planetary gearbox [J]. Sensors, 2017, 17(2): 414.
[11] 李紅,孫冬梅,沈玉成.改進加權融合算法與雙譜技術在風電軸承故障診斷中的應用[J].電子器件,2018,41(4):898?904.
[12] 李德鵬,代偉,趙大勇,等.一種基于魯棒隨機向量函數鏈接網絡的磨礦粒度集成建模方法[J].工程科學學報,2019,41(1):67?77.
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
