淺談智能多工位焊接機器人的設計與實現
2020-07-10 04:42:58王詠梅
科學與信息化 2020年7期
關鍵詞:智能
王詠梅
摘 要 焊接作為一種制造技術,是為適應工業發展需要,以現代工業為基礎發展起來的,并且直接服務于機械制造工業。焊接生產的效率和質量問題必須通過實現焊接生產過程的機械化和自動化來加以解決,焊接機器人的出現為實現這一目標提供了可能。采用機器人焊接已經成為焊接技術自動化的主要標志。
關鍵詞 智能;多工位;焊接機器人
1焊接機器人的意義
在工業生產中采用焊接機器人具有重大意義:①提高焊接質量,保證焊件均一性。焊接工藝參數(包括焊接電流、電壓、焊接速度及焊接干伸長度等)對焊接質量具有決定性的作用。人工焊接時,操作人員的焊接技術、精神狀態等直接影響焊接質量。機器人焊接時,降低了對工人操作技術的依賴,焊接質量得以保證。②改善工人的勞動條件和工作環境。焊接機器人工作時,工人只需裝卸工件,遠離焊接弧光、煙霧和飛濺等,使工人從惡劣的工作環境和大強度的勞動中解脫出來。③提高勞動生產率。機器人可以全天候連續生產。另外,通過使用焊接機器人進行高速高效焊接可以顯著提高生產效率。④縮短產品改型換代的周期。機器人焊接可以通過修改程序以適應不同工件的生產,從而實現小批量產品的焊接自動化[1]。
2智能多工位焊接機器人的實現
2.1 虛擬空間技術
(1)基于OpenGL的多機器人仿真環境
針對現有機器人仿真軟件無法嵌入用戶控制算法,提出開發基于OpenGL多機器人協同控制算法的軟件仿真環境,并通過嵌入碰撞檢測算法實現對多機器人在協同工作時的運動空間碰撞檢測及碰撞位置的顯示與預警。該軟件包括人機界面,仿真結果可視化,可按實際需求添加控制算法。
(2)基于Matlab的多機器人仿真環境
提出了一種以Matlab軟件為平臺,充分結合Pro/E 等三維實體設計軟件、Matlab 3D 動畫技術建立可視化程度高、細節顯示逼真的機器人3D仿真研究平臺。并經過了機器人 3D 仿真模型的建立、仿真實體的數據導入和仿真系統的3D動畫演示等步驟,最終得到一個系統軟件開放程度高、可視化效果逼真的機器人3D仿真環境。
(3)基于CAD導航的機器人末端軌跡規劃
為解決機器人噴涂作業中傳統人工示教方法耗時長、易出錯和過于依賴工人技術等局限性,提出一種基于CAD導航的機器人工具軌跡規劃方法。該方法通過對噴涂漆膜霧錐模型建模優化得到最佳路徑間距,采用優化路徑間距作為與工件CAD模型求交獲取噴涂路徑,最后通過噴涂路徑求得機器人工具軌跡。該方法可以實現對噴涂路徑間距優化,從而使在此基礎上規劃噴涂軌跡能夠滿足漆膜平均厚度要求和漆膜厚度變化。
2.2 空間碰撞檢測及避障技術
(1)混合包圍體層次樹碰撞檢測算法
為解決噴涂、焊接、裝配等工業現場中能快速檢測出機器人與周邊環境是否發生碰撞,提出一種適用于鉸接模型機器人的碰撞檢測算法——混合包圍體層次樹算法。該算法借助由OBB包圍機器人連桿時更緊湊和以OBB為基元構建球包圍體時計算簡化、耗時少這些不同包圍體所具有的優勢,并采用由頂層、中間層和底層三層結構構成的包圍體層次樹技術。如果包圍體層次樹中父節點包圍體不存在碰撞,則無須對子節點包圍體進行碰撞檢測,且頂層與中間層采用二叉樹結構來存儲數據,以此加快碰撞檢測速度。而且該算法可以隨著機器人實際運動時各連桿間相對位置的變化而動態更新,以此適應機器人的碰撞檢測。
(2)并行混合包圍體層次樹碰撞檢測算法
針對現有多機器人間碰撞檢測算法耗時過多的問題,提出上層動態剔除層、中間連桿層、底層三層結構的并行動態包圍體層次樹碰撞檢測算法。首先采用三層結構構建機器人兩兩間動態包圍體層次樹;然后依次對上、中、底各層設計并行加速的并行架構,采用OpenMP的3種并行結構實現碰撞檢測并行計算。在相同實驗條件下,動態包圍體層次樹中間連桿層、底層并行處理后碰撞檢測效率是原動態包圍體層次樹的2倍左右,是RAPID的4倍以上。
(3)基于二階錐規劃的超二次曲面接近查詢
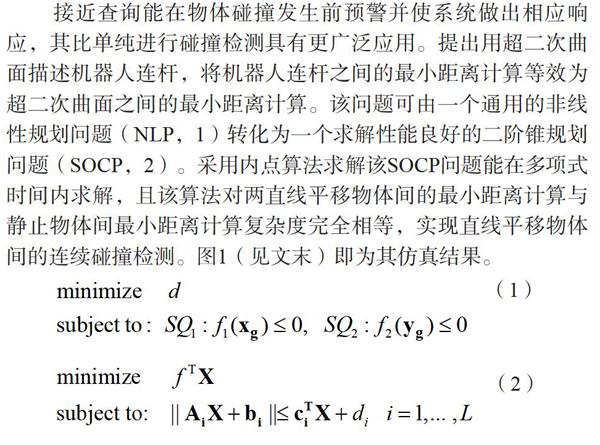
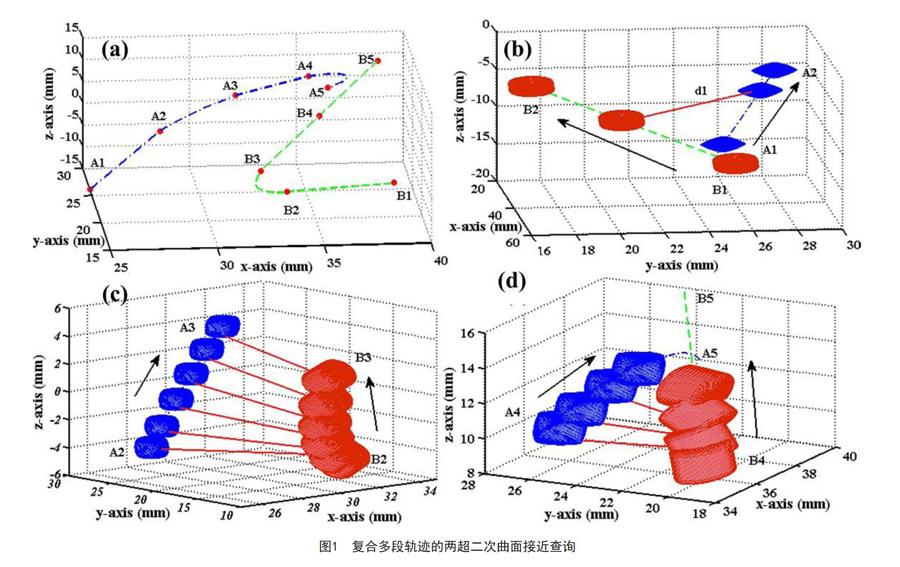
接近查詢能在物體碰撞發生前預警并使系統做出相應響應,其比單純進行碰撞檢測具有更廣泛應用。提出用超二次曲面描述機器人連桿,將機器人連桿之間的最小距離計算等效為超二次曲面之間的最小距離計算。該問題可由一個通用的非線性規劃問題(NLP,1)轉化為一個求解性能良好的二階錐規劃問題(SOCP,2)。采用內點算法求解該SOCP問題能在多項式時間內求解,且該算法對兩直線平移物體間的最小距離計算與靜止物體間最小距離計算復雜度完全相等,實現直線平移物體間的連續碰撞檢測。圖1(見文末)即為其仿真結果。
2.3 多機器人系統避障與最優協調
采用延時啟動的時空置換策略,實現多機器人系統的避障與最優協調。以車間現場環境下給定軌跡的多工業機器人系統(不限于兩臺)為研究對象。通過定義規范化路徑和規范化軌跡,將機器人連桿與連桿之間的空間碰撞信息反映射為時間碰撞信息。采用延時啟動的時空置換策略,推導多工業機器人系統無碰撞的充分條件和最優協調的必要條件,并分別建立兩種條件下的混合整數線性規劃模型。
2.4 智能變位裝夾機構的研制
一個完整的機器人焊接系統一般包括機器人本體、控制系統、自動焊機和自動變位機等組成。2自由度的智能焊接變位機方案設計、結構分析與計算、計算機仿真、零件圖及裝配圖的繪制,于2012年年底完成樣機的制作和調試,與自主研制的6自由度機器人一起組成機器人自動焊接系統。
開發的變位機的主要技術參數:
額定載荷:200kg;
工作臺尺寸:φ800mm;
最大回轉速度:12.0rad/min;
最大翻轉速度:8.0rad/min;
最大偏心距:150mm;
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44