深海聲學潛標的定位方法研究
2020-07-07 06:26:42薛睿超楊燕明周鴻濤許德偉
聲學技術 2020年3期
薛睿超,楊燕明,周鴻濤,許德偉,楊 晟
(1.國家海洋局第三海洋研究所,福建廈門361005;2.國家衛星海洋應用中心,北京100000)
潛標是獲取海洋環境噪聲信息的重要技術裝備。潛標裝置能攜帶多種測量和探測儀器, 在惡劣海況條件下相對隱蔽地進行長期、定點、連續和多層面同步測量, 所以潛標裝置在海洋科學調查研究、海洋軍事偵察等方面得到了廣泛的應用[1-4]。潛標技術最早發展于上個世紀50年代的美國,60多年來已發展為一種主要的海洋測量設備[5]。現在國際上除了美國,英國、法國、俄國、加拿大等國也成立了以水下工程技術和深潛技術為主的一批海洋高新技術開發機構。潛標技術也向綜合性、長時間、區域性的方向發展[6-10]。
本文中深海潛標定位指的是潛標入水后,底層的重塊在海流的影響下會發生漂移,在深海海域漂移的距離會隨著海深的增加而增加,導致潛標在海中的實際位置與入水坐標存在數百米的誤差。對于深海海域,潛標整體長度在1 000~6 000 m之間,在海流的影響下,潛標姿態往往有一定的傾斜[11-13],主浮體和重塊的水平距離可以達到幾百米到近千米。故雖然記錄了潛標的入水坐標,潛標的位置有可能發生很大的變化[14],給潛標的搜尋工作帶來很大的困難,甚至直接導致回收失敗、系統丟失,造成巨大的經濟損失。為了得到潛標在水中的實際位置以便回收工作的順利進行,有必要進行重新定位。特別是在潛標回收時,如果遇到釋放器失效等情況造成潛標無法回收,衛星通信(簡稱衛通)設備無法工作,必須先進行定位以及姿態分析,得到潛標的實際位置以及水下姿態等信息才可開展打撈工作。
1 潛標結構介紹
為了便于本文方法的說明,先簡要介紹深海潛標的常見結構[15-18],如圖1所示。各部分的功能說明如下:
(1) 衛通設備:一般固定在主浮體上,可與衛星通信,在水中處于休眠狀態,釋放后隨主浮體浮出水面后啟動工作狀態,可以把主浮體的坐標經緯度發送給調查人員;
(2) 主浮體:提供整套潛標系統的主要浮力,其上可綁漂流繩便于回收;
(3) 接收陣:潛標搭載的記錄設備(如水聽器和深度記錄儀),具體數量和固定位置根據海域情況和數據要求決定;
(4) 過渡繩:用于連接接收陣和底部設備的纜繩;
(5) 浮球:提供整套系統的部分浮力以及重要設備上浮所需要的浮力,個數和單位浮力需要具體計算;
(6) 聲學釋放器:潛標回收的主要設備,通過與調查船上的甲板單元進行通信,可返回聲學釋放器與甲板單元之間的距離數據,并可觸發釋放模式斷開與重塊的連接,使整套潛標系統上浮;
(7) 鋼纜:連接釋放器與重塊,長度不宜過短以起到緩沖作用;
(8) 重塊(或抓力錨):使整套系統能沉入海底,重量需具體計算,一般應大于系統整體浮力的2~3倍,其上可加減速傘以減小沉底速度。
2 定位方法
2.1 十字交叉法
2.1.1 設計原理
十字交叉定位法的原理是基于幾何方法的中垂線定理,具體是:通過聲學釋放器的測距功能,設計船舶行駛的多條測線,并在途中進行多次測距,最終找到距離潛標最近的坐標。該方法原理簡單易懂,便于操船人員理解和執行,缺點是較費船時,精度較低。
2.1.2 實施方式
首先根據記錄的重塊入水點,船舶航行至目標點附近距離1海里(1海里=1 852 m)左右,以正北方向距船舶一海里處為目標點,然后分別確定試探測線、確定測線以及驗證測線。
試探測線:由目標點和船舶的連線確定,長度為1~2海里,具體視測量結果決定。
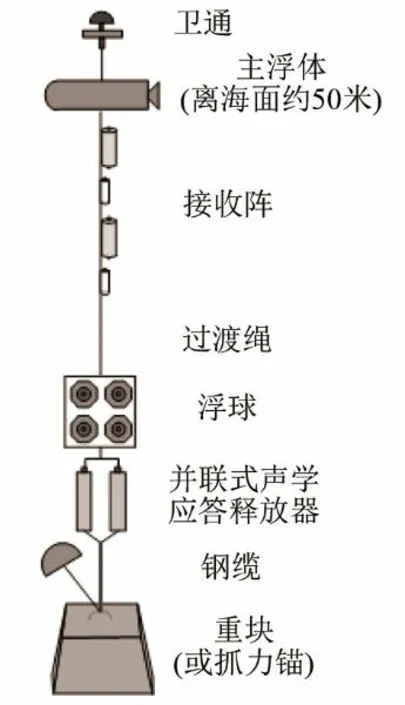
圖1 常見潛標結構圖Fig.1 The universal structure chart of submerged buoy
確定測線:根據試探測線的結果,以其垂直線和最小測距坐標為垂足確定確定測線,通過確定測線可初步得到重塊沉底的位置坐標;
驗證測線:以確定測線的垂線和第二次最小測距坐標為垂足驗證測線,通過驗證測線來驗證最終重塊的沉底位置。
“十字交叉法”船舶航行軌跡由圖2所示。具體實施步驟如下:
(1) 船舶航行通過AB測線,期間每隔5 min做一次聲學釋放器應答實驗,并記錄距離值和坐標,根據距離值的變化情況(如從大到小再到大),提取兩個距離值最相近的點連線,其中垂線所在位置可定出確定測線CD;
(2) 船舶航行通過CD測線,同AB測線步驟可得另一中垂線EF,兩條中垂線的交點可定出坐標點G點;
(3) 最后船舶航行通過EF測線,同樣進行聲學釋放器應答實驗進行驗證。如經過G點前后距離值由大變小再變大,則證明G點為最終計算得到的水泥塊沉底坐標。
由圖2可知,實際航行路線為A→B→C→H→E→F。
2.2 三點法
2.2.1 設計原理
本文所要介紹的另一種定位方法是三點式潛標定位法,該方法只需要對3個非同一直線上的坐標進行測距,測量過程在回收航行過程中即可完成,即能準確地定位重塊在海底的實際位置。相比十字交叉法,該方法基于數學計算和幾何模型,執行難度較低,節省了船時。
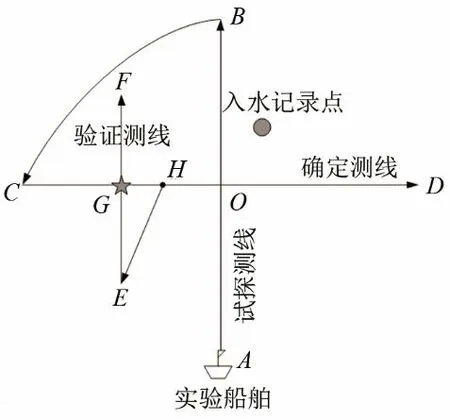
圖2 “十字交叉法”船舶航行軌跡Fig.2 Ship tracks for "cross method" localization
為實現上述目的,所采用的技術方案包括如下步驟:
(1) 獲取三個釋放器響應距離內不同位置的經緯度和相應的測距值;
(2) 把數據代入本文的幾何模型中;
(3) 通過自編的計算程序進行計算處理,得到重塊經緯度和深度的計算值和示意圖。
步驟(1)中需要在調查船靠近潛標的航行中做3次測量(其間距離不宜過小),相對于十字交叉法,需要設計特定的測線進行定位,節約了船舶航行的時間和成本,這是本方法的一大優勢。步驟(2)中涉及的計算方法構建的幾何模型如圖3所示:3次測量實驗的坐標計為A、B、C(3點應相距一定的距離且不在同一直線上),所測得的3個距離值計為ra、br、cr,設L點為重塊在海中的坐標,以A為球心、ra為半徑的球與以B為球心,rb為半徑的球相交于面1。同理,以A為球心、ra半徑的球與以C為球心、rc為半徑的球相交于面2。其平面示意圖如圖4所示。圖4中,A、B、C3點所處面為海面,OD為球A與球B相交面在海面的投影,OE為球A與球C相交面在海面的投影,則OL垂直海面于O點,O點為線OL在海面的投影。由幾何關系可知,面1與面2必垂直于海面且二者相交于直線OL,則OL也垂直于海面,具體計算過程見2.2.3節。所以O點的經緯度即為所求重塊的位置,OL的長度為重塊處的海深;步驟(3)中的計算程序基于MATLAB軟件編寫,計算結果包括重塊的經緯度、重塊所處位置的海深以及測量結果的位置示意圖等。
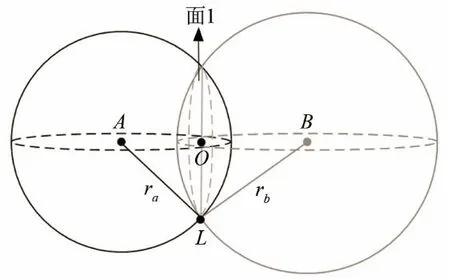
圖3 空間幾何模型示意圖Fig.3 Schematic diagram of spatial geometry model
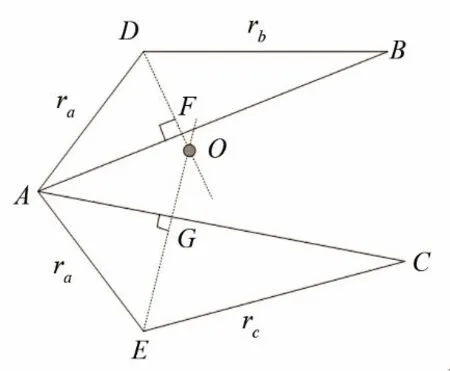
圖4 平面幾何模型示意圖Fig.4 Schematic diagram of plane geometry model
2.2.2 實施方式
下面結合圖例對本文的實施方式進行說明。實施方法流程圖如圖5所示。具體實施步驟如下:
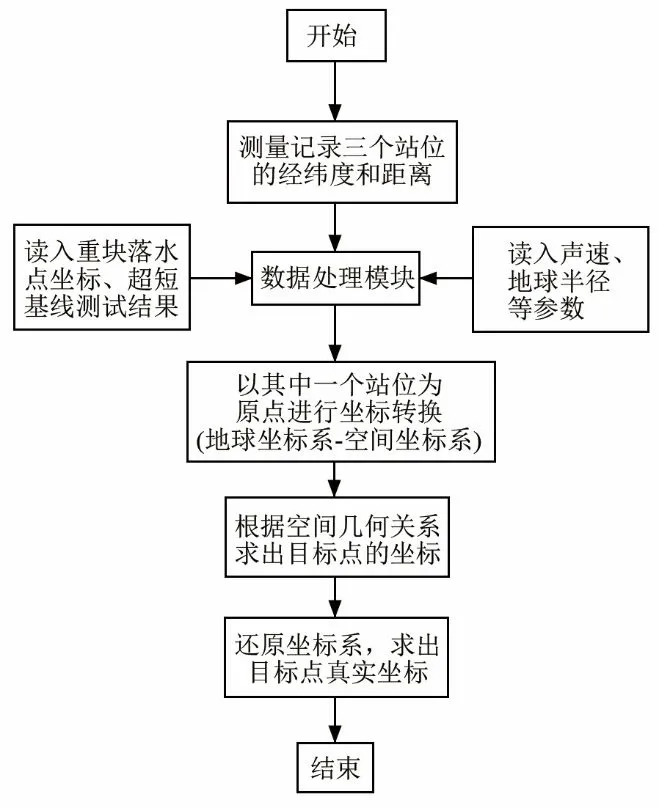
圖5 三點法計算流程圖Fig.5 The flow chart of three-point method calculation
(1) 在潛標布放點附近的3個不同站位進行3次聲學釋放器響應實驗,得到3組數據,該步驟可以在回收潛標的航行過程中進行;
(2) 輸入重塊落水點、當地平均聲速、地球平均半徑、超短基線測試結果(如有)等參數;
(3) 把地球坐標系轉換為以A(B、C也可)為原點的空間坐標系,記為A坐標系,求出A坐標系中B、C的坐標;
(4) 根據空間幾何關系,計算得到目標點的坐標以及OL的長度。具體計算步驟如下:
? 求出球A、球B與球A、球C的兩個相交圓所在平面的方程;
? 求出平面ABC的單位法向量;
? 由平面ABC和兩個相交圓所在平面定出O點的坐標以及OL的長度;
(5) 還原為地球坐標系,得到目標的經緯度值和海深。
2.2.3 計算過程
設三次測量的點為A、B、C,坐標分別為(ax,ay),(bx,by),(cx,cy),已知地球半徑R=6 371 116 m,計算過程如下:
(1) 轉換為地球坐標系,則:
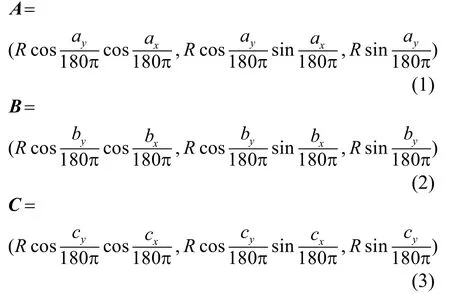
(2) 轉換為以A為原點的空間坐標系,則A、B、C的坐標A、B、C分別為

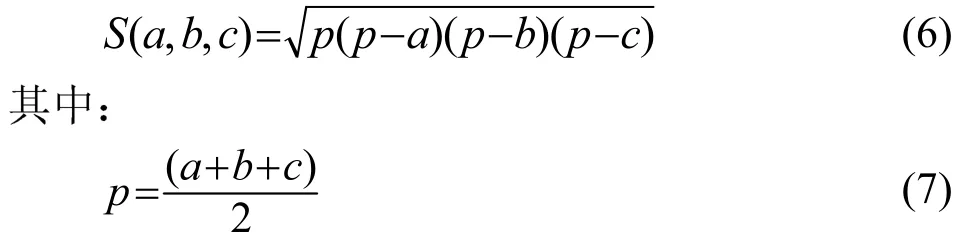
(3) 在空間坐標中,已知兩點坐標,則兩點間的距離為

根據海倫三角公式,三角形面積可表示為
(4) 根據A、B兩點的坐標和距離求出球A、球B相交圓周所在平面(以下簡稱面AB)的單位法向量,同理求出球A、球C相交圓周所在平面(以下簡稱面AC)的單位法向量:


由面AB和面AC法向量可求出ABC所在平面的法向量:

(5) 求出F、G點在以A為原點的空間坐標系里的坐標:

(6) 至此,已知3個相交面的法向量和面上的點坐標,求解方程組可確定O點,根據AL和AO的長度確定深度OL的長度:

3 對比實驗驗證
本文中的兩種方法均已在實際航次中得到應用,取得了良好的效果。其中三點式定位法在某海域的某專項聲學調查航次期間,利用潛標上搭載的超短基線定位設備的測量結果進行了對比實驗。實驗所布放的潛標所在海域水深約為2 000 m,符合深海的標準。
3.1 驗證方法
在潛標的浮球上安裝了一個超短基線水下定位系統,該系統激活后,通過與船載部分GPS的通信可以得到水下設備所在處的經緯度以及與調查船之間的距離,具有較高的精確度。通過本文方法的結果與該位置數據進行對比,可以判斷本文方法的準確性以及誤差范圍。
實驗過程如下:調查船布放潛標后,記錄重塊的入水點坐標;在附近海域分別進行3次測量,為提高實驗的準確性,分別在重塊入水點的3個不同方位的站位進行了測量,對比實驗測點及結果示意圖如圖6所示。超短基線設備因工作深度問題,只能安裝在離水面較近的玻璃微珠浮球上,潛標上安裝多個不同深度的深度傳感器設備,可用來分析潛標在水中的姿態和傾角等參數。

圖6 對比實驗測點及結果示意圖Fig.6 The measuring points and the results of comparative experiment
3.2 實驗結果與誤差分析
對比實驗設備安裝結構及誤差分析結果如圖7所示。實驗結果重塊距落水點水平漂移距離379 m,超短基線水下定位系統返回的坐標位置與本方法計算的坐標位置二者相差359 m。考慮到超短基線所在浮球的位置與聲學釋放器之間的線纜長度為1420 m(設計值),再根據深度傳感器數據,判斷潛標在水中的姿態傾角約為14 °,則實際水平距離應為343.5 m,計算值誤差為15.5 m,如圖7所示。

圖7 對比實驗設備安裝及誤差分析結果Fig.7 Layout of comparative experiment and the error analysis result
4 結 論
本文介紹的三點式定位法的精度依賴于聲學釋放器的系統定位精度,而聲學釋放器的精度受其數據處理方法的影響(如默認聲速為 1 500 m·s-1),返回的測量距離往往有幾米到幾十米的誤差。假設水深為 5 000 m,綜合考慮各設備精度,實際誤差在50 ~100 m間、精度為1%~2%,可以滿足實際使用要求。
本文介紹的定位方法經過多次海上調查實驗的驗證,具有計算精度高、可節約航行時間的特點,可以有效地解決深海潛標回收工作中遇到的實際問題,如潛標失效或者定位海底固定目標等,可供從事海洋調查的人員參考交流。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
