臂載線結構激光手眼矩陣的精確標定
——多坐標系轉換法
2020-07-03 05:38:06經小龍郭為忠
上海交通大學學報 2020年6期
經小龍, 胡 源, 郭為忠
(上海交通大學 機械與動力工程學院, 上海 200240)
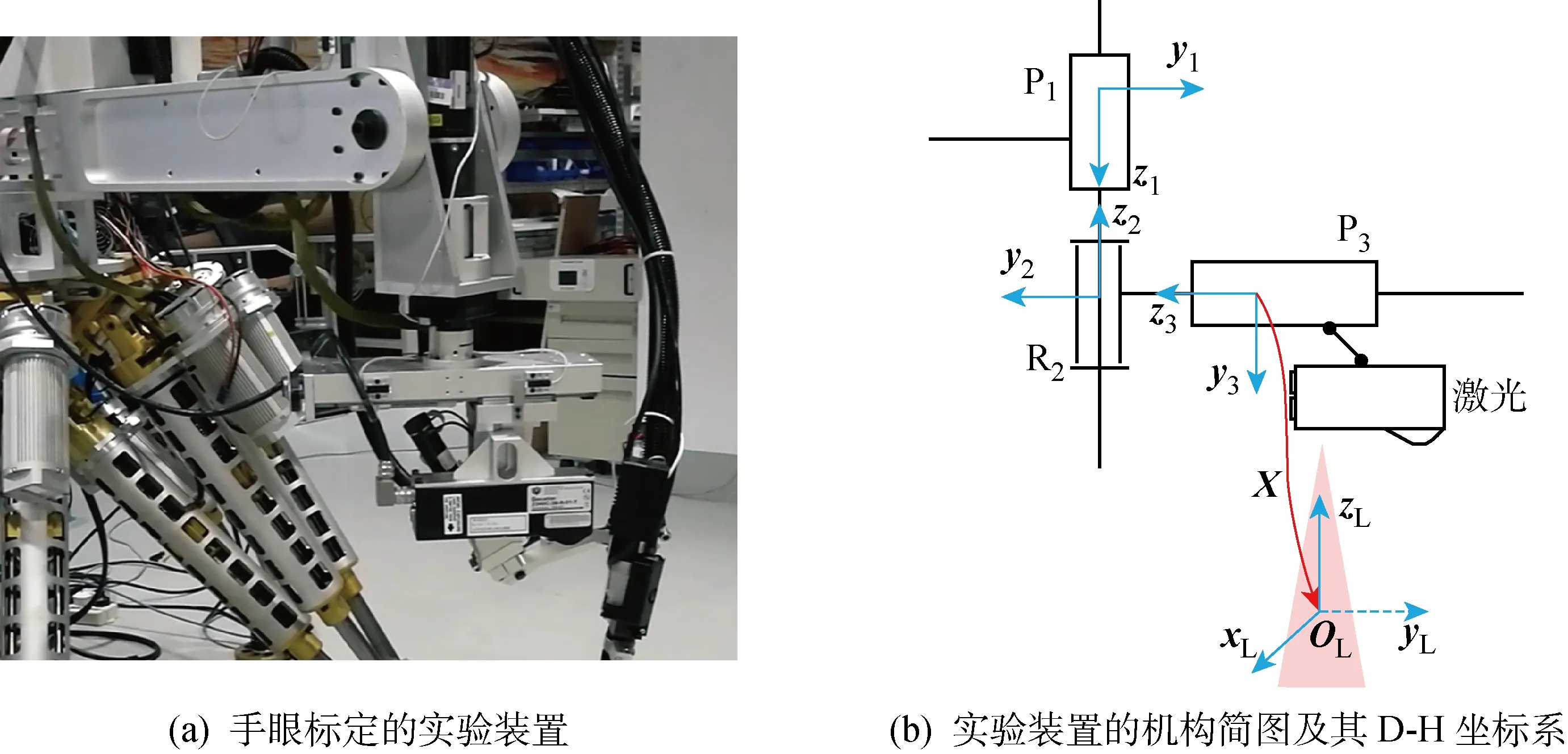
圖1 臂裝線激光與P1R2P3機械臂的手眼結構
將傳感器(攝像頭、線結構激光位移傳感器)安裝于機器人的末端連桿上,構成對環境具有一定感知能力的智能機器人是機器人的主要發展趨勢[1].線激光傳感器具有高測量速度和高精度等特點,時常用在諸如焊接定位等高精度作業中.但是,線激光傳感器每次只能測量激光掃描平面內的二維輪廓信息,實現三維感知則需通過手眼矩陣將這種二維輪廓信息轉換為相對于末端連桿坐標系的三維點云信息,然后將三維信息轉換到全局坐標系.手眼矩陣的測量過程即為手眼標定,又稱為外參標定.
對于傳感器的手眼標定,目前最為廣泛使用的是建立形如GX=XF的手眼方程[2]后再對其進行求解,但該方法難以直接用于線結構激光的手眼標定.Che等[3]將激光二維坐標系和測量裝置掃描軸組合成非正交坐標系,并建立起該非正交坐標系到全局坐標系的數學模型和求解算法,進而求得手眼矩陣.然而,這種方法操作不便、計算復雜,且非正交坐標系變換會引入非線性誤差,難以用于線結構激光這種高精度傳感器的手眼標定.此外,利用多傳感器[4-5]的特點和相關約束關系求解手眼矩陣也受到某些研究者的青睞,但多傳感器的使用增加了實驗的難度和不確定性.內外參數同時標定[6-8]也獲得了廣泛的研究,但這對于已進行過內參出廠預標定的線結構激光傳感器并無必要,且會增加標定和計算的復雜度.使用立方體3個互相垂直的3條邊構成中間坐標系進行手眼標定[9-11],針對特定機器人的手眼標定[12-14]以及手眼標定的相關優化算法[15-17]也受到了較大的關注.針對線激光的手眼標定,最為經典的方法是定點變位姿(FPDP)法[1, 18-19]及其改進方法[20-21],由于其操作和計算的簡便與快捷性,受到很多研究者的青睞.但這種方法受到機械臂的制造誤差、裝配誤差、電機回程誤差等影響較大,并可能會在某些機構構型的機械臂中失效.此外,文獻[22]提出一種利用中間坐標系間接求取手眼坐標系的方法,可消除運動學誤差的影響.但是,該方法需要借助一塊嵌有9個標準球體的平面基板,操作較為復雜,且難以應用于激光等二維視覺傳感器上.

1 臂裝線激光的手眼結構
臂裝線激光與P1R2P3機械臂的手眼結構如圖1所示.線結構激光傳感器安裝于P1R2P3焊接機械臂的第3個關節P3上.線激光的測量平面為OL-xLzL,其測量結果為線激光坐標系下的二維輪廓
CL={mi=(xi,0,zi),i=0,1,…,k}
(1)
式中:mi為二維輪廓點云的第i個點.
假設手眼矩陣X已知,可通過齊次變換進行三維重建,獲得的全局坐標系中的三維點云為
(2)

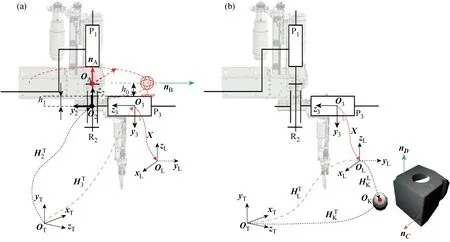
圖3 多坐標系轉換法原理圖
2 定點變位姿法

由于關節位移可通過電機編碼器反饋獲得, 所以可通過Denavit-Hartenberg (D-H)方法求得球心在全局坐標系下的坐標Qi(i=1,2,…,n).由于標定球和全局坐標系始終保持不變,所以存在關系
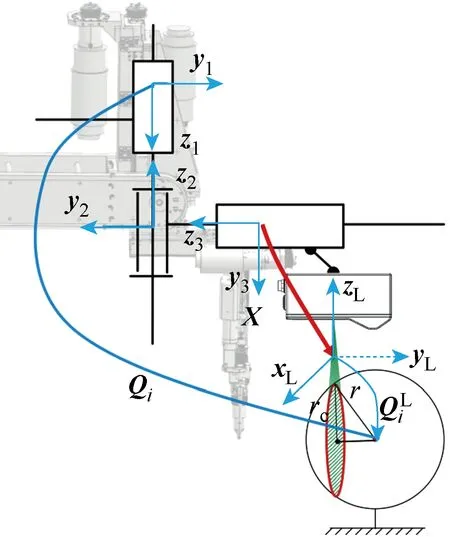
圖2 定點變位姿法原理圖
通過最小二乘法即可快速求得手眼變換矩陣X.但是,該方法對機械臂本體的制造誤差、裝配誤差、電機回程誤差、運動學模型的誤差非常敏感,計算結果往往誤差較大,無法直接用于高精度點云的三維重建.
3 多坐標系轉換法

(5)

(1) 控制轉動關節R2旋轉使靶球沿圓弧運動,激光跟蹤儀記錄靶球球心在T中的運動軌跡.通過最小二乘法對軌跡進行擬合,獲得該圓弧軌跡的圓心記為OA,圓弧軸線記為nA.
(2) 控制移動關節P3移動使靶球沿直線運動,激光跟蹤儀記錄其運動軌跡,該直線軌跡所在直線向量記為nB.
(3) 已知靶球球心與關節P3上表面的垂直高度為h0,關節R2的D-H坐標系2原點與關節P3上表面的垂直高度為h1.
則關節R2的D-H坐標系2相對于T的齊次變換矩陣為
(6)
移動關節P3的電機編碼器讀數為q3,則有
(7)
(3) 將靶球球心位置作為原點,兩個法向量分別作為x、y方向的坐標軸,構建臨時坐標系K,則該臨時坐標系K相對于激光跟蹤儀坐標系T的齊次變換矩陣為
(8)
(4) 保持靶球和標準塊位置固定不動,記錄此時關節P3位移為q30.控制移動關節P3移動,同時線激光不斷掃描獲得一系列二維輪廓數據,記錄每一幀輪廓CL={mi,i=1,2,…,k}及其對應的關節廣義輸入q3i,通過齊次變換即可得每一幀輪廓在激光坐標系中的坐標為
(9)
由上述所有輪廓線所組成的三維點云為C為
C=∪Ci
(10)

(11)
(12)
最后,根據式(5)即可計算出手眼變換矩陣X.
4 手眼矩陣標定實驗
實驗機器人為圖1所示的P1R2P33自由度串聯機械臂,線激光傳感器為Gocator2340,其單次掃描輪廓點數為 1 280,測距范圍為190~210 mm,測量精度為0.037 mm.為方便比較,可根據手眼矩陣X計算其旋轉軸v,旋轉角度θ和平移矩陣p,并在4.3節的誤差分析中分別用ev,eθ,ep表示各自的測量誤差.
(13)
θ=
(14)
(15)
4.1 定點變位姿法標定實驗
通過定點變位姿法進行3次標定實驗,每次實驗測量16組數據,其中1次的測量結果如表1所示.其中:x、y分別為激光所截截圓形輪廓線的圓心坐標;d1、θ2、d3分別為驅動關節P1R2P3的廣義輸入.
通過式(3)~(4)和式(13)~(15)計算,可獲得3次實驗的結果分別為
表1 定點變位姿法的一次標定實驗數據
Tab.1 One of the experimental data of fixed point from different poses methods
組數x/mmy/mmrc/mmd1/mmθ2/(°)d3/mm116.00-10.93-27.67171.673.3590.92215.12-15.02-26.70172.044.0792.37???????1534.5512.55-18.76180.07-13.3890.18
4.2 多坐標系轉換法標定實驗
通過多坐標系轉換法進行3次標定實驗,其過程示意如圖4所示,其中1次測量結果如表2所示.
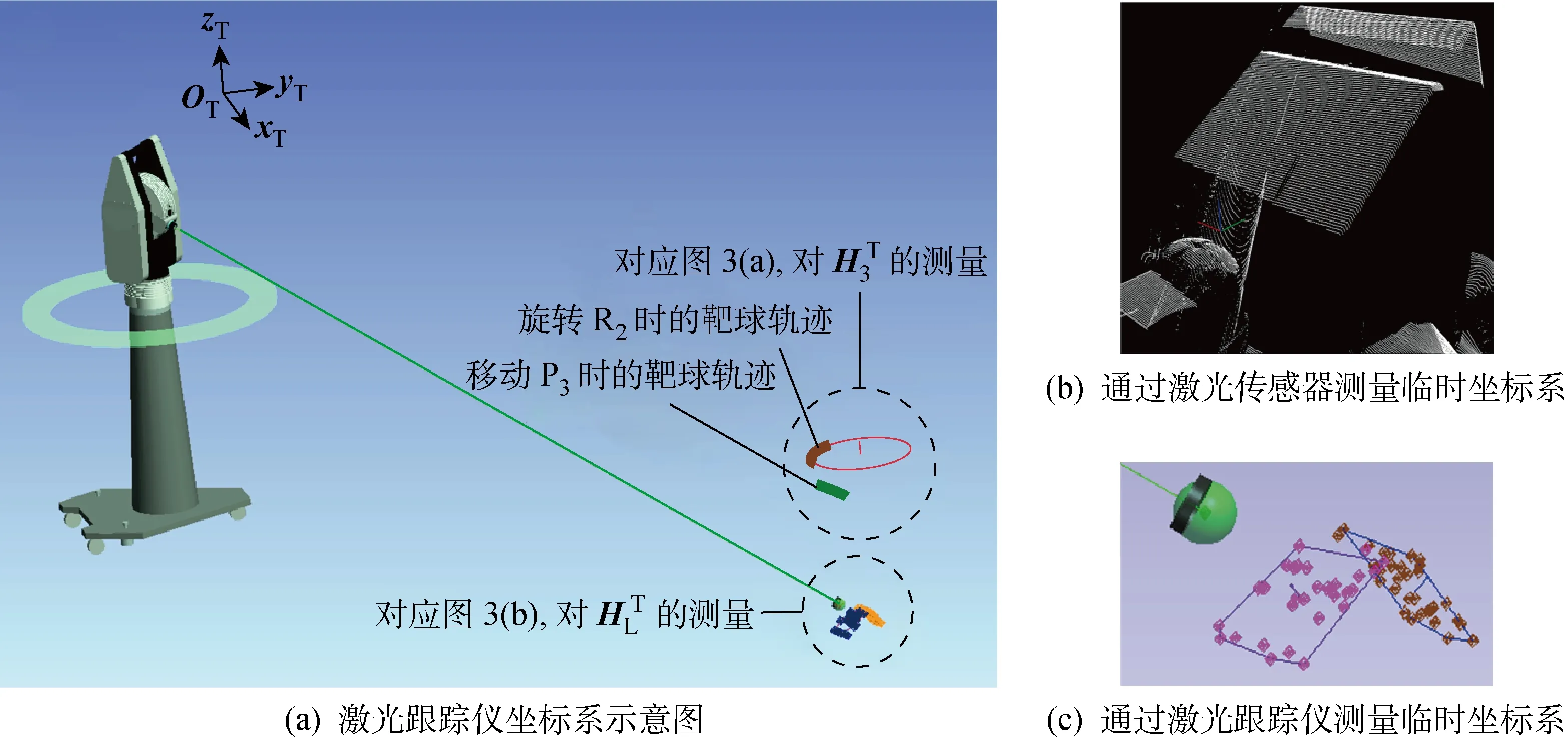
圖4 多坐標系變換法測量手眼矩陣實驗

表2 MCT法的1次標定實驗數據
通過式(5)~(15)計算,可獲得3次實驗的結果分別為
4.3 實驗結果誤差分析
下文將分別對定點變位姿法和多坐標系轉換法的標定結果進行誤差分析,由于事先不知道手眼標定矩陣的準確值,所以取3次實驗的平均值作為手眼標定矩陣的無偏估計.由于手眼標定矩陣的旋轉矩陣部分和平移矩陣部分量綱不同,所以分別對其旋轉軸、旋轉角度、平移矩陣進行誤差分析.


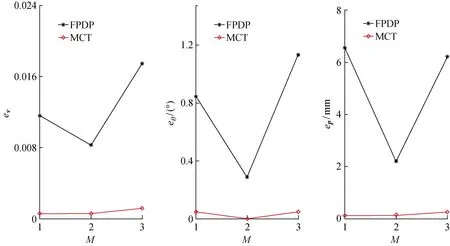
圖5 手眼矩的陣旋轉軸、旋轉角度、平移矩陣誤差
由圖5可知,FPDP法測量手眼矩陣誤差大、精度低、測量結果不穩定.這是由于FPDP法在整個過程中需要不斷運動所有關節并多次記錄各個關節的廣義輸入,所以手眼矩陣精度對機械臂關節的加工精度、裝配精度、電機回程誤差、運動學模型誤差等因素非常敏感.這一影響在平移矩陣的計算結果上體現得尤為明顯,其平移矩陣的誤差甚至達到5 mm以上,這在對精度要求非常高的應用場合是無法接受的.另一方面,其平移矩陣p在y方向的值py=0恒成立,但事實上這不是正確的結果.這是由于FPDP法在求解式(3)時需要將該式轉化為形如GX=F的方程,然后再通過最小二乘法求解,但是該方程中矩陣G不滿秩,因此造成求解結果中py的缺失.這也是FPDP法的另一缺陷,FPDP法在測量某些機構位型的手眼矩陣時會造成缺項,不具備普適性.
另一方面,使用所提的MCT法測量手眼矩陣,其精度有了極大的提升.在不同的實驗條件下,手眼矩陣的計算結果相差極小,各次計算所得的旋轉軸線誤差ev<0.001,旋轉角度誤差eθ≤0.07°,位移矩陣誤差ep≤0.25 mm,相比于FPDP法,其誤差極大地降低了.這是由于在測量過程中,僅需機械臂末端的兩個關節產生運動,完全消除了機械臂末端兩關節之前的關節加工誤差、裝配誤差、電機誤差的影響.此外,最后兩個關節僅在最初運動一次后即固定不再改變,并未在整個標定過程中多次取值,因此也極大地減小了因這最后兩個關節的誤差對結果精度的影響,從而進一步提高了測量精度.此外,MCT法通過借助臨時坐標系間接測量手眼矩陣的思想,僅使用最后兩個關節之間的D-H參數,不需要最小二乘法求解,不會出現矩陣不滿秩而無法計算X某些項的情況,可用于任何二自由度及以上的臂載線結構激光的手眼矩陣的精確標定.
5 結語
本文提出一種用于臂載線結構激光手眼矩陣精確標定的新方法——多坐標系轉換法.該方法借助激光跟蹤儀和標定物,找到末端連桿坐標系E和線結構激光坐標系L相對于激光跟蹤儀坐標系T的齊次變換矩陣,從而間接計算末端連桿與線激光坐標系的手眼矩陣.該方法操作簡便、誤差小、精度高,并且對實驗器材沒有嚴格要求.實驗結果顯示,由該方法測量所得手眼矩陣的旋轉軸誤差小于0.001,旋轉角度誤差小于0.07°,位移矩陣誤差小于0.25 mm.經過對比發現,其性能優于傳統的定點變位姿法.該方法不受傳感器類型的影響,既適用于可獲得二維信息的傳感器,如線激光,也適用于可獲得三維信息的傳感器,如三維激光和雙目攝像頭.此外,該方法不受機構位型的影響,適用于任何兩自由度及以上的串聯機械臂手眼結構的標定.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21