主從機(jī)械手遙操作雙邊自適應(yīng)阻抗控制策略
2020-07-03 05:56:58張建軍吳中華劉群坡王紅旗劉衛(wèi)東
上海交通大學(xué)學(xué)報(bào) 2020年6期
關(guān)鍵詞:模型設(shè)計(jì)
張建軍, 吳中華, 劉群坡, 王紅旗, 劉衛(wèi)東
(1. 河南理工大學(xué) 電氣工程與自動(dòng)化學(xué)院,河南 焦作 454000; 2. 西北工業(yè)大學(xué) 航海學(xué)院, 西安 710072)
主從機(jī)械手遙操作雙邊系統(tǒng)解決了因距離限制使操作者直接處于危險(xiǎn)區(qū)域的問(wèn)題,實(shí)現(xiàn)了人機(jī)智能交互[1].從機(jī)械手位于工作區(qū)域直接與操作對(duì)象交互,跟蹤主機(jī)械手的運(yùn)動(dòng)信號(hào)并將與環(huán)境交互力信號(hào)傳送至本地主機(jī)械手,使操作者在操作本地主機(jī)械手的同時(shí)能夠感知從機(jī)械手傳送至本地的力信息[2].然而,主從機(jī)械手具有非線性特征、參數(shù)的不確定性[3]、關(guān)節(jié)摩擦[4]、外部干擾以及通訊時(shí)延問(wèn)題[5].此外,操作者和遠(yuǎn)端環(huán)境分別與主從機(jī)械手交互影響機(jī)械手?jǐn)?shù)學(xué)模型.遠(yuǎn)端從機(jī)械手運(yùn)動(dòng)過(guò)程受到阻力等不確定擾動(dòng),難以獲得機(jī)器人數(shù)學(xué)模型,且無(wú)法通過(guò)線性系統(tǒng)的伺服控制理論設(shè)計(jì)控制器.不確定遙操作控制在保證整體系統(tǒng)穩(wěn)定性的前提下,提高透明性及魯棒性,將位置、力信號(hào)同步地在主、從機(jī)械手上復(fù)現(xiàn),依然是整體控制目標(biāo)[6].
假設(shè)操作者與被操作對(duì)象無(wú)源,主從遙操作系統(tǒng)可以看作外環(huán)、實(shí)現(xiàn)主手(全文主手即主機(jī)械手)力跟蹤、內(nèi)環(huán)從手位置跟蹤的雙閉環(huán)控制系統(tǒng).其控制主要有基于力反饋[7]以及位置反饋[8]兩種反饋方式,實(shí)現(xiàn)主手與從手(全文從手即從機(jī)械手)力和位置的協(xié)同一致.為了解決遙操作控制中存在的模型不確定及外部干擾等問(wèn)題,國(guó)內(nèi)外很多學(xué)者提出了不同的控制方法[9-10].針對(duì)機(jī)械手雙邊遙操作系統(tǒng)從手不確定干擾問(wèn)題,Park等[11-12]提出了從手阻抗控制與積分滑模消除從手不確定干擾問(wèn)題并實(shí)現(xiàn)了力位移跟蹤,但未考慮主手關(guān)節(jié)摩擦以及外部不確定問(wèn)題.郭語(yǔ)等[13]針對(duì)主手的不確定問(wèn)題,提出了主手端擾動(dòng)觀測(cè)器的雙邊阻抗控制下的自適應(yīng)控制.然而其控制律設(shè)計(jì)以質(zhì)量-阻尼線性系統(tǒng)為基礎(chǔ),對(duì)于二維豎直平面受到重力影響存在控制不確定性.Sharifi等[14-15]在主從機(jī)器人考慮非線性動(dòng)力學(xué)模型,針對(duì)關(guān)節(jié)摩擦引起的模型不確定問(wèn)題,提出了自適應(yīng)雙邊控制方法并應(yīng)用到康復(fù)訓(xùn)練遙操作過(guò)程中,但是沒(méi)考慮外部干擾引起的不確定問(wèn)題.針對(duì)速度不可測(cè)以及不確定動(dòng)態(tài)方程問(wèn)題,Yang[16]提出了基于速度觀測(cè)器的神經(jīng)網(wǎng)絡(luò)不確定補(bǔ)償?shù)聂敯艋?刂疲瑢?shí)現(xiàn)了主從手力位置同步.
通訊時(shí)延是影響遙操作控制性能的關(guān)鍵問(wèn)題,很多學(xué)者對(duì)固定時(shí)延以及可變時(shí)延做了深入研究.然而,對(duì)于如排雷排爆、水下遙操作、核輻射區(qū)遙操作等雙邊遙操作系統(tǒng),由于距離較近通訊時(shí)延影響可以忽略不計(jì),此時(shí)模型不確定性以及外部干擾引起的問(wèn)題更為明顯.本文針對(duì)主從機(jī)械手雙邊遙操作過(guò)程中動(dòng)態(tài)模型不確定及外部干擾問(wèn)題,提出了雙邊自適應(yīng)阻抗控制策略.通過(guò)建立線性二階微分方程的參考阻抗模型,將主從手參考阻抗模型的動(dòng)態(tài)響應(yīng)期望位置作為主從機(jī)械手末端的操作空間下的位置跟蹤目標(biāo),并且設(shè)計(jì)了主從手控制律.通過(guò)自適應(yīng)調(diào)節(jié)補(bǔ)償參數(shù)的不確定性,針對(duì)外部干擾,設(shè)計(jì)了自適應(yīng)上界估計(jì)率,利用基于滑模控制的自適應(yīng)律來(lái)抑制不確定誤差及外部干擾作用,實(shí)現(xiàn)了模型不確定性及外部干擾下的魯棒性能.所設(shè)計(jì)的控制律無(wú)需獲知雙機(jī)械手的準(zhǔn)確數(shù)學(xué)模型以及主從機(jī)械手的不確定干擾上界,只需要保證主從手力測(cè)量的準(zhǔn)確性,主從機(jī)械手位置和關(guān)節(jié)長(zhǎng)度的準(zhǔn)確測(cè)量,即可實(shí)現(xiàn)主從手力位移跟蹤漸進(jìn)收斂特征.
1 數(shù)學(xué)模型及基本屬性
n自由度主從機(jī)械手關(guān)節(jié)空間非線性動(dòng)力學(xué)模型為[17]
(1)
(2)
式中:Ωi(qi)為關(guān)節(jié)空間下關(guān)節(jié)位置qi與操作空間下末端位置xi的函數(shù)關(guān)系.設(shè)xi與qi同維,即設(shè)機(jī)械手為非冗余,Ji(qi)=dΩi(qi)/dqi為非奇異矩陣.將式(2)代入式(1),整理可得機(jī)械手在操作空間的動(dòng)力學(xué)方程:
(3)
結(jié)合式(1)與(3)可得:
(4)
上述非線性機(jī)械手系統(tǒng)具有以下屬性[18-19]:
屬性1機(jī)械手慣性矩陣Mi(qi)與Mxi(qi)正定,且有上下界.

屬性4根據(jù)未知參數(shù)不同,機(jī)械手動(dòng)力學(xué)模型可以線性化為
(5)

2 整體控制策略
本文提出的基于參考阻抗模型的自適應(yīng)雙邊控制框圖如圖1所示.ximm,xims分別為主、從機(jī)械手阻抗模型輸出的期望位置.為了實(shí)現(xiàn)主機(jī)械手上的人機(jī)交互以及從機(jī)械手目標(biāo)抓取過(guò)程交互,設(shè)計(jì)了兩種阻抗模型.在該控制方案中,主手通過(guò)操作者作用力與環(huán)境力建立阻抗模型獲取期望的主手位置,通過(guò)魯棒自適應(yīng)控制律及外部誤差上界估計(jì)實(shí)現(xiàn)基于阻抗模型的期望位置跟蹤.從手通過(guò)環(huán)境力與主手位置建立期望的阻抗模型,通過(guò)魯棒自適應(yīng)調(diào)節(jié)控制律及自適應(yīng)上界估計(jì)實(shí)現(xiàn)從手對(duì)從手期望阻抗位置跟蹤.基于阻抗模型的參考自適應(yīng)阻抗控制的目標(biāo)是基于關(guān)節(jié)摩擦及外部干擾等引起數(shù)學(xué)模型不確定的前提下,保證主從手力-位置跟蹤的穩(wěn)定性及收斂性.
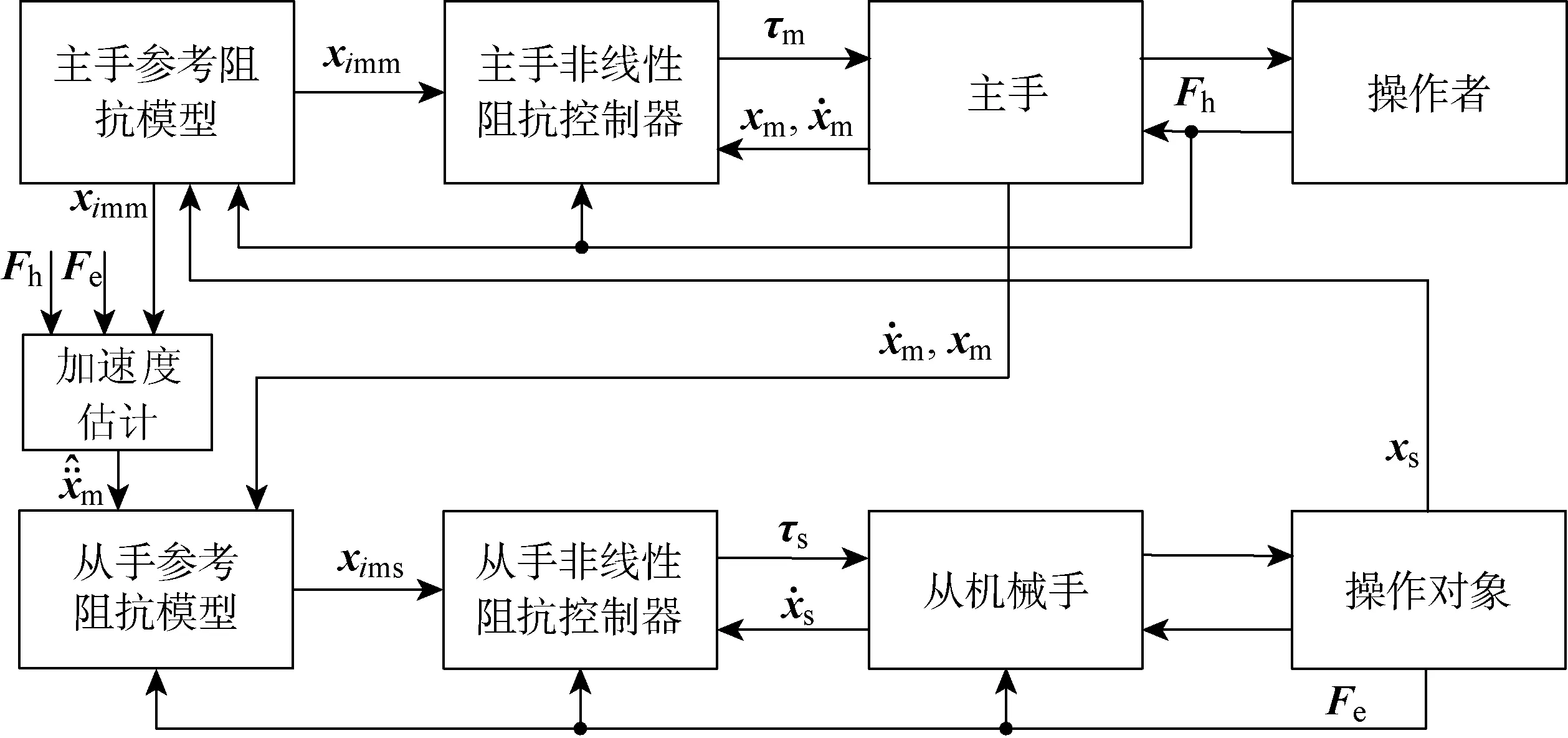
圖1 遙操作雙邊自適應(yīng)阻抗控制結(jié)構(gòu)圖
3 控制器設(shè)計(jì)
阻抗控制通過(guò)調(diào)節(jié)用戶設(shè)定的目標(biāo)阻抗模型使機(jī)器人末端實(shí)現(xiàn)柔順性運(yùn)動(dòng),將阻抗控制加入自適應(yīng)特征,使在外界不確定條件下主機(jī)械手觸覺(jué)力跟蹤從手觸覺(jué)力信號(hào)具有魯棒性能.在自適應(yīng)阻抗控制實(shí)現(xiàn)過(guò)程中,將設(shè)計(jì)的阻抗控制模型作為參考模型,通過(guò)設(shè)計(jì)控制器和自適應(yīng)律使被控對(duì)象閉環(huán)動(dòng)態(tài)模型逼近參考模型.在提出的阻抗遙操作系統(tǒng)中,定義了兩種阻抗模型根據(jù)主手上與人的交互以及從手與環(huán)境的交互過(guò)程,主從機(jī)械手期望阻抗模型設(shè)計(jì)如下[20]:

(6)
(7)


(10)
(11)

(12)
(13)
證明:選取李雅普諾夫函數(shù)為
(14)
由于Mxm、Mxs正定,很顯然V0>0.對(duì)式(14)求V0關(guān)于時(shí)間的一階導(dǎo)數(shù),將式(10)、(11)及相應(yīng)控制律(12)、(13)代入,可得

(15)
定理1證明完畢.然而,實(shí)際應(yīng)用中主從機(jī)械手控制器無(wú)法保證動(dòng)態(tài)方程參數(shù)以及外部干擾信號(hào)全部已知,基于τmeq、τseq設(shè)計(jì)不確定條件下的主從手操作空間控制律為
(16)
(17)


(18)

(19)
(20)
(21)


(22)


(23)

(24)
(25)
(26)
主從機(jī)械手的自適應(yīng)律設(shè)計(jì)為
(27)

(28)
式中:Pm、Ps為正定對(duì)角矩陣.
4 穩(wěn)定性證明

證明:選取李雅普諾夫函數(shù)為
V1=Vm+Vs
(29)
(30)
(31)
(32)

(33)

(34)

(35)
由式(33)、(35)與(29)可得
(36)
對(duì)式(36)不等式兩端積分可得



(37)
(38)

5 仿真與驗(yàn)證
從機(jī)械手跟蹤主機(jī)械手運(yùn)動(dòng)過(guò)程中,分為自由空間運(yùn)動(dòng)以及與環(huán)境接觸約束運(yùn)動(dòng)[24,25].建立從機(jī)械手抓取目標(biāo)的受力模型,只考慮運(yùn)動(dòng)位置對(duì)Fe的影響,從機(jī)械手在與環(huán)境接觸時(shí),環(huán)境受力看成無(wú)源的線性彈簧,一維空間下,接觸力Fe可以表示為
(39)
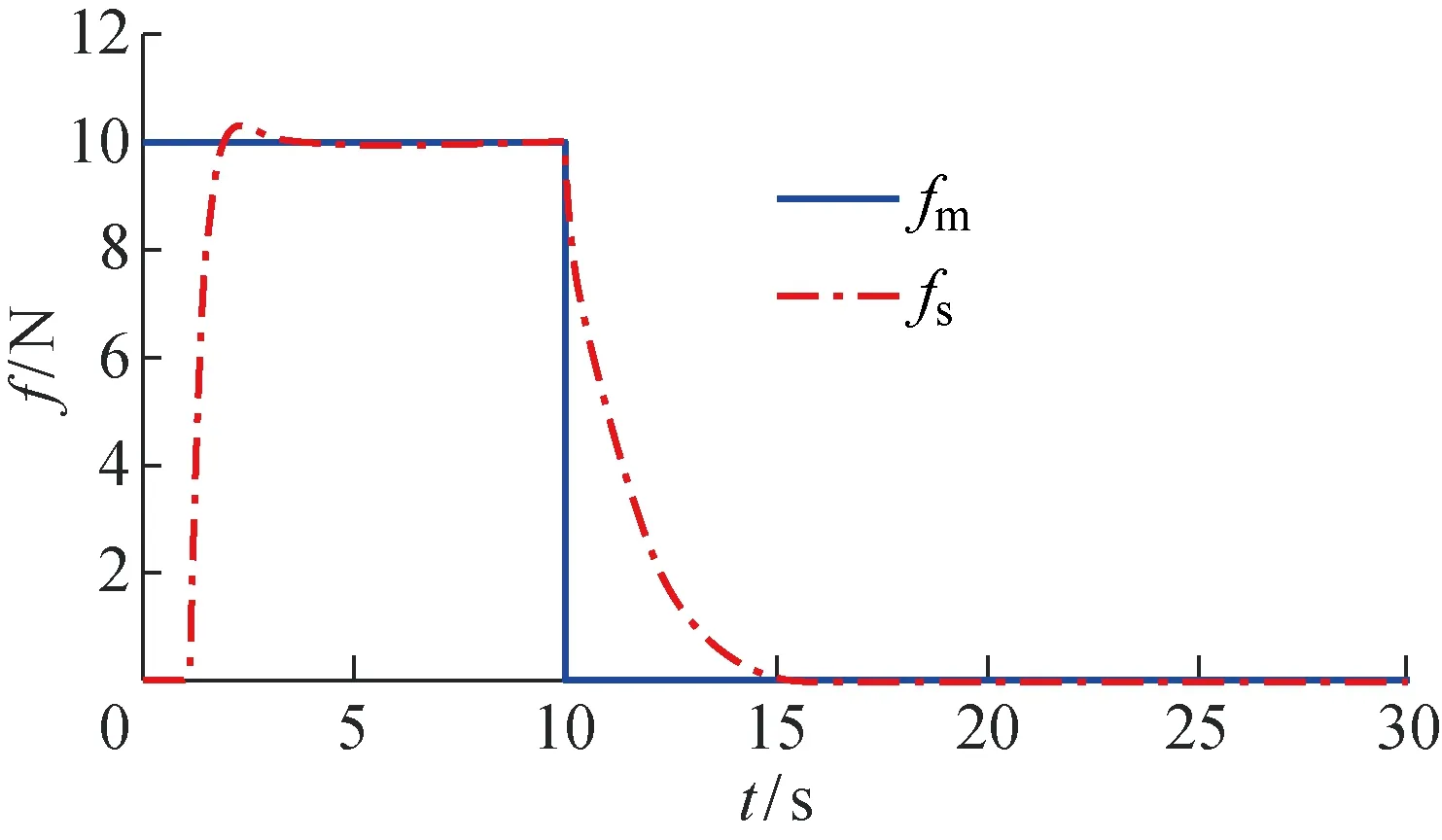
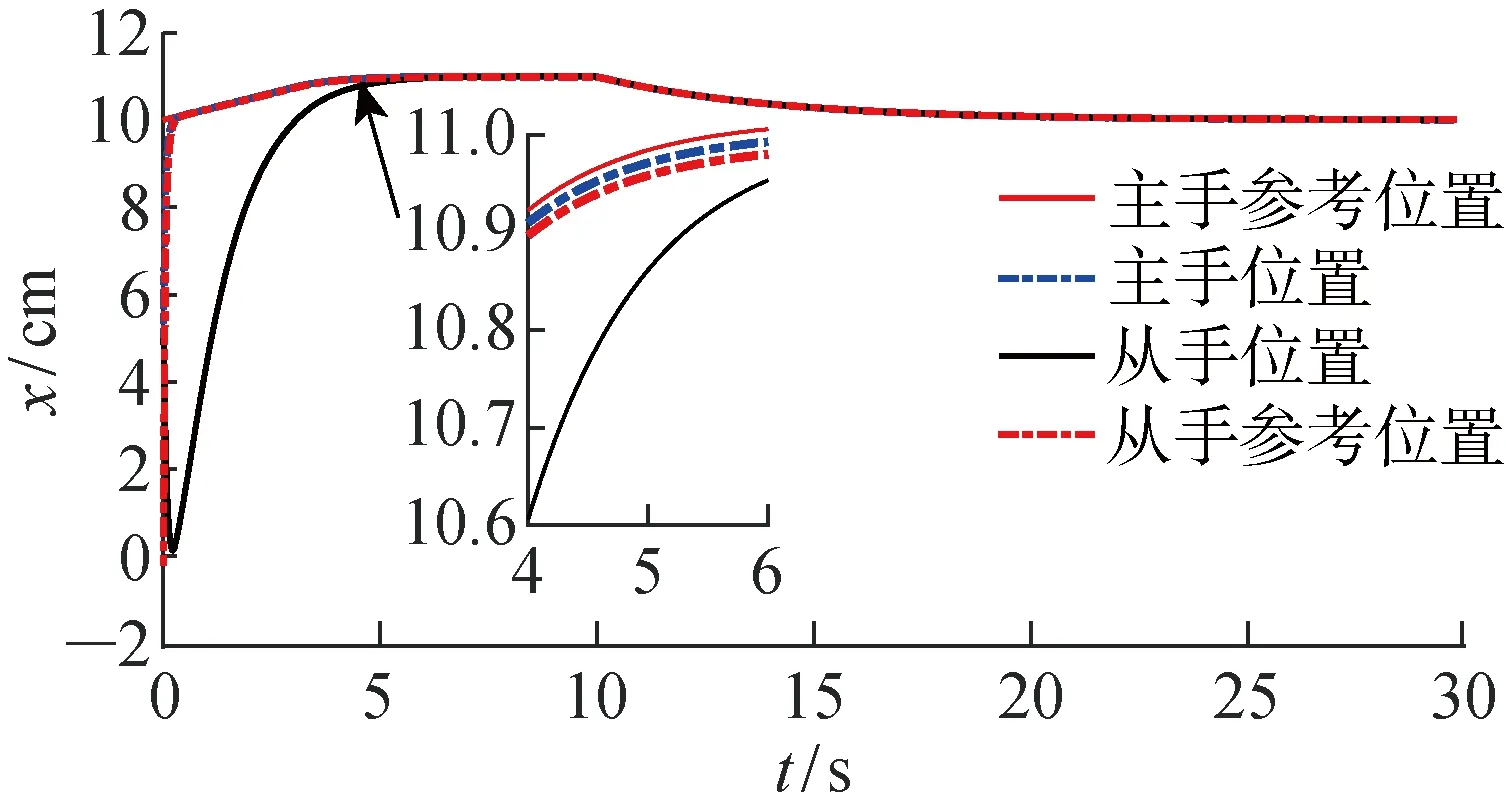
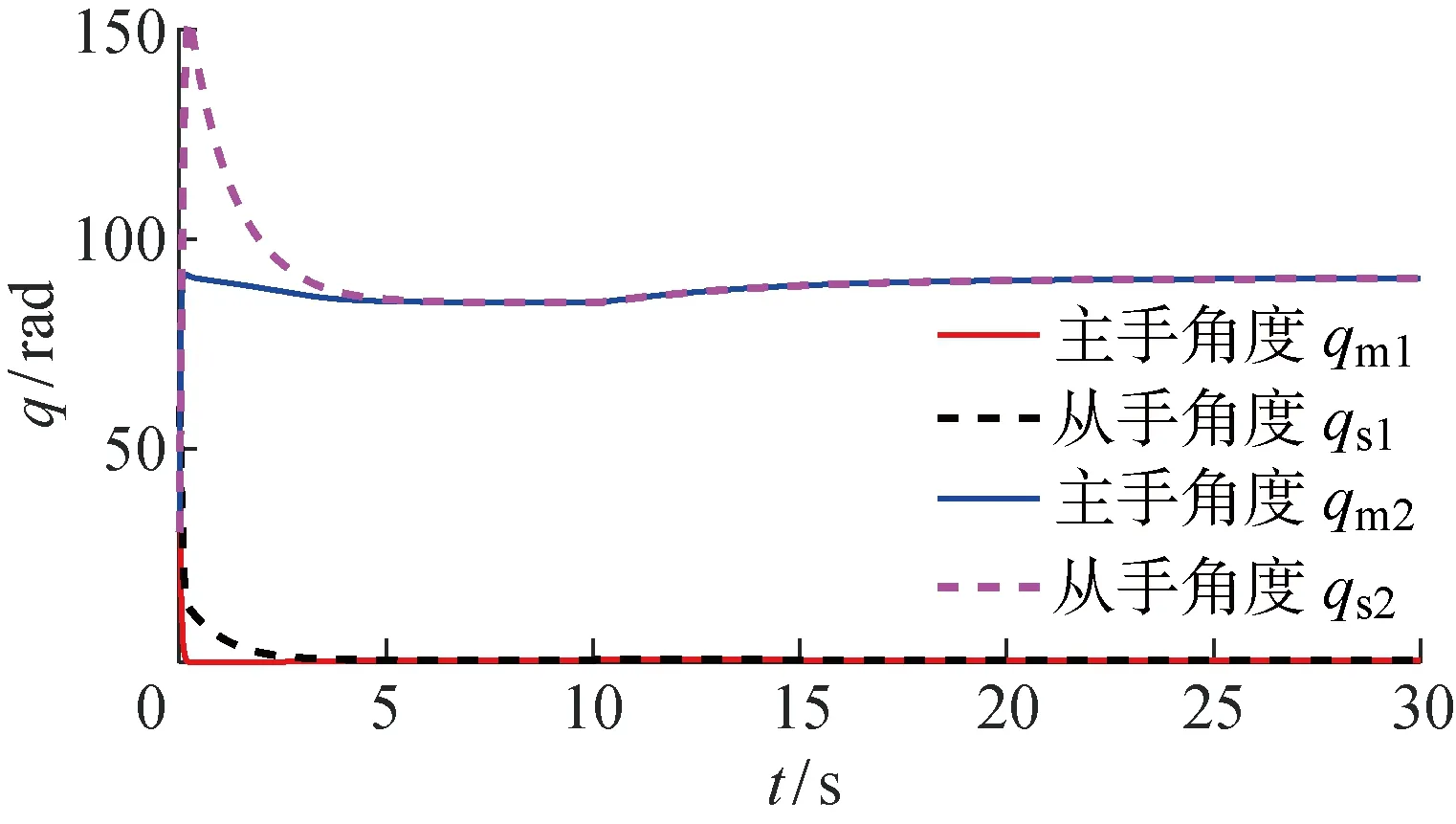
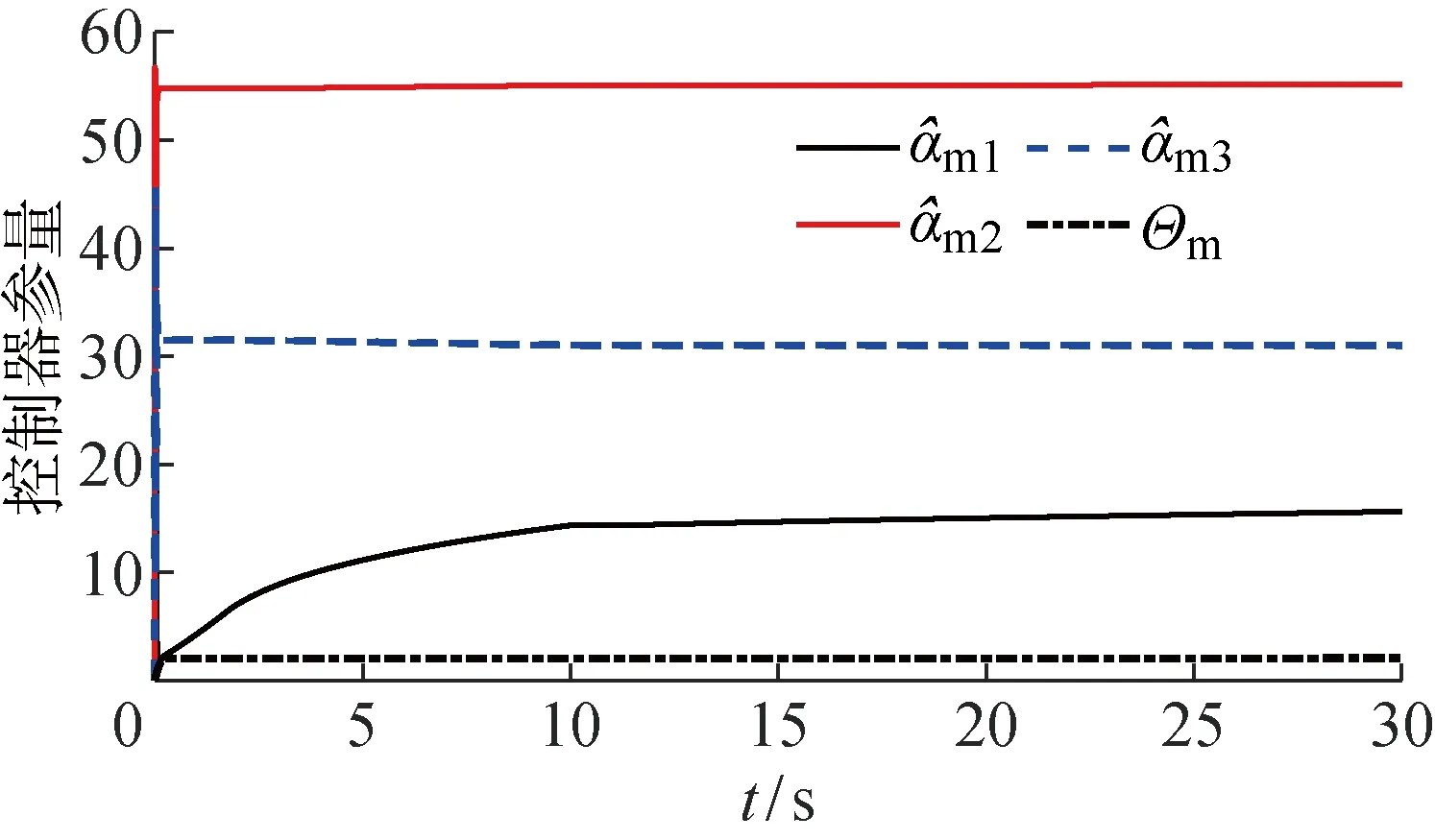
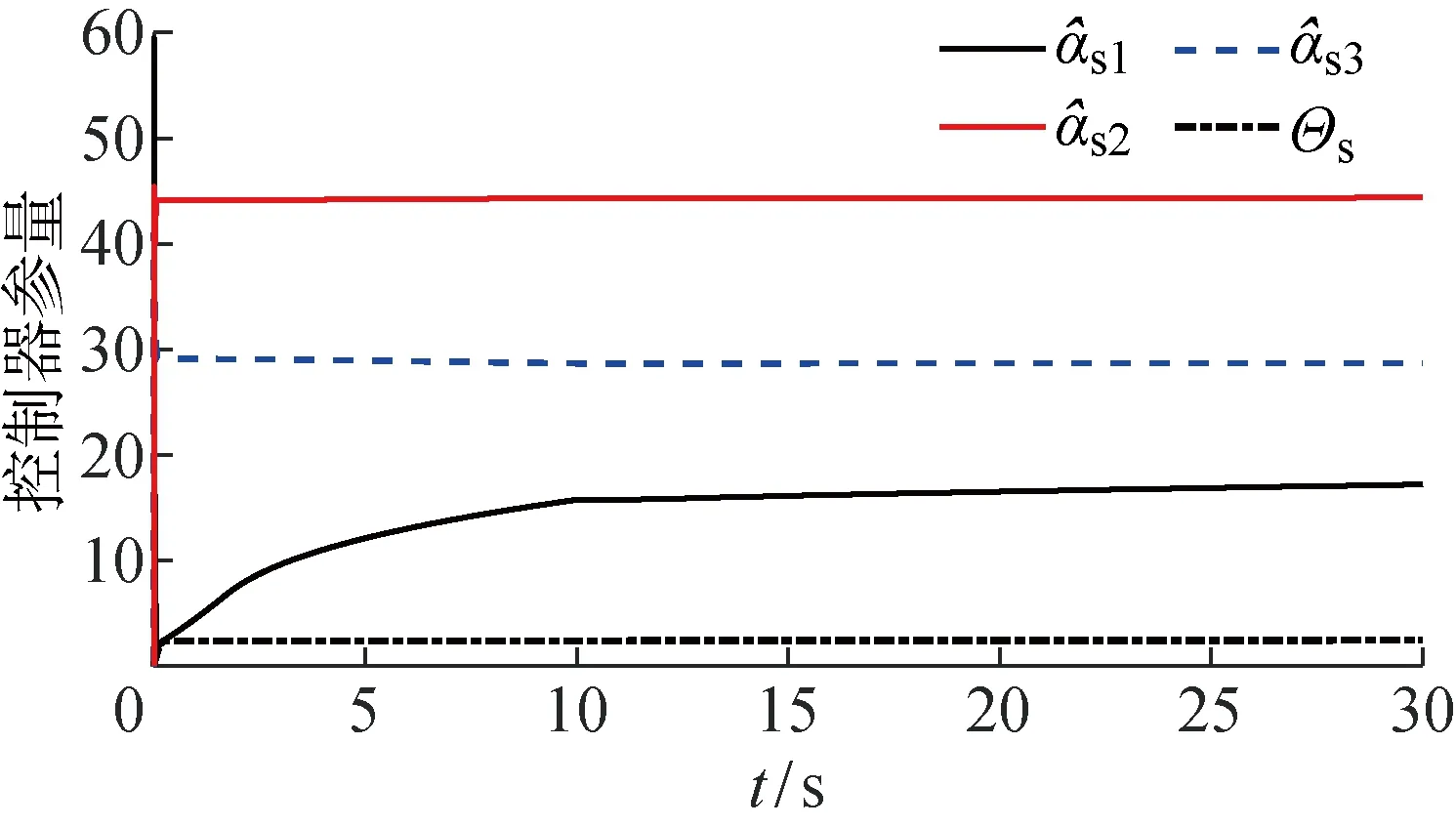
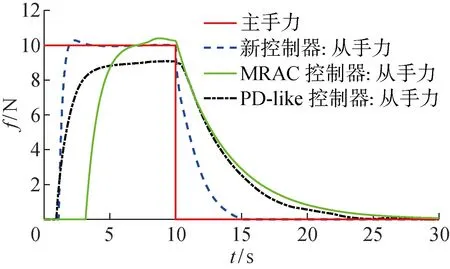
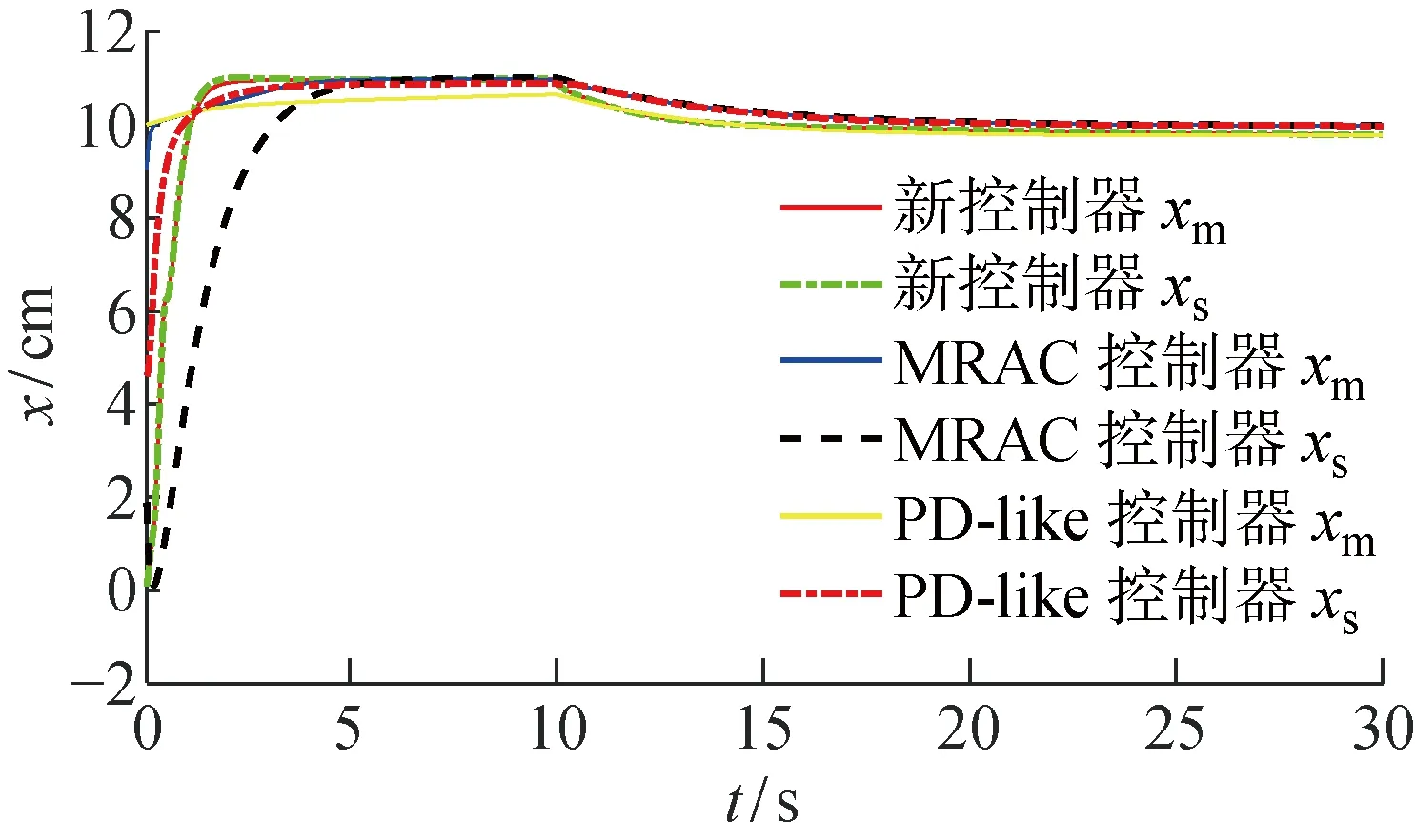
式中:xe為一維空間下,從機(jī)械手與接觸環(huán)境的位置;ke為抓取目標(biāo)的剛度系數(shù).xs 圖2 遙操作機(jī)械手結(jié)構(gòu)示意圖 設(shè)操作者只在操作空間x軸方向施加作用力,x軸方向剛度系數(shù)ke=100 N/m,y軸方向不施加作用力.從機(jī)械手在x軸方向xe=0.1 m處與抓取目標(biāo)接觸.仿真時(shí)間設(shè)為30 s,前10 s在主機(jī)械手上施加10 N的作用力,然后將作用力設(shè)為0 N.即在機(jī)械手上施加10 N作用力持續(xù)10 s,然后不再施加力,持續(xù)20 s,觀察機(jī)械手的力-位移跟蹤狀態(tài). 圖3~5中f為作用力,qi1、qi2為qi的元素.從手、主手操作空間位置實(shí)現(xiàn)對(duì)主從機(jī)械手設(shè)定阻抗模型期望位置跟蹤,同理實(shí)現(xiàn)從手對(duì)主手的關(guān)節(jié)位置跟蹤,在主手上操作者施加力與從手和環(huán)境中之間交互力一致協(xié)調(diào)相等.從手初始位置位于與抓取目標(biāo)不接觸的自由位置,跟蹤主機(jī)械手位置運(yùn)動(dòng)到0.1 m時(shí)實(shí)現(xiàn)于抓取目標(biāo)交互,此時(shí)從手依然實(shí)現(xiàn)對(duì)主手的位置跟蹤,此時(shí)主手上開(kāi)始感受到從手的反饋力以致到主手力信號(hào)與從手力信號(hào)誤差漸進(jìn)收斂于0. 圖3 遙操作機(jī)械手力跟蹤曲線圖 圖4 主從機(jī)械手參考位置與位置跟蹤曲線圖 圖5 遙操作主從手關(guān)節(jié)角度跟蹤曲線圖 圖6 主手自適應(yīng)律曲線圖 圖7 從手自適應(yīng)律曲線圖 在系統(tǒng)模型不確定以及外部干擾條件下,整體系統(tǒng)仍然保證從手對(duì)主手的力跟蹤以及從手對(duì)主手的位置跟蹤.主手內(nèi)部不確定自適應(yīng)律以及外部干擾上界不確定自適應(yīng)律對(duì)外部干擾以及自身模型不定性的補(bǔ)償,滿足了魯棒穩(wěn)定性特征. 為了驗(yàn)證所設(shè)計(jì)控制器的先進(jìn)性與優(yōu)越性,所設(shè)計(jì)的控制器(新控制器)與文獻(xiàn)[1]的模型參考自適應(yīng)控制和文獻(xiàn)[2]的PD+like控制器做了相應(yīng)比對(duì).針對(duì)式(1)所示包含關(guān)節(jié)摩擦及外部干擾的機(jī)械手模型,在主手x方向加10 N的力信號(hào),3種控制器的力跟蹤與位移跟蹤曲線如圖8和9所示. 由圖8和9可知,所提出的控制方法跟蹤過(guò)程具有快速性及無(wú)靜態(tài)誤差的特點(diǎn),避免了由于外部干擾引起的震蕩特點(diǎn). 圖8 不同控制器條件下主、從手力跟蹤曲線圖 圖9 不同控制器條件下主、從手位置曲線圖 提出了基于阻抗參考模型的自適應(yīng)控制方法實(shí)現(xiàn)主手、從手力位移信號(hào)的同步.通過(guò)建立線性二階微分方程的參考阻抗模型,將主從手參考阻抗模型的動(dòng)態(tài)響應(yīng)期望位置作為主從機(jī)械手末端的操作空間下的位置跟蹤目標(biāo).對(duì)機(jī)械手動(dòng)態(tài)參數(shù)不確定在線學(xué)習(xí)估計(jì),對(duì)外界干擾作不確定上界估計(jì),并且設(shè)計(jì)了滑模控制項(xiàng)消除內(nèi)部干擾與外部不確定干擾,保證了主從機(jī)械手閉環(huán)動(dòng)態(tài)方程與參考阻抗模型動(dòng)態(tài)方程相一致,實(shí)現(xiàn)了主從機(jī)械手末端對(duì)參考阻抗模型輸出的期望位置誤差漸進(jìn)收斂于0.利用李雅普諾函數(shù)證明了系統(tǒng)的穩(wěn)定性及透明性,在MATLAB/Simulink上進(jìn)行仿真實(shí)驗(yàn)驗(yàn)證了控制系統(tǒng)的魯棒性及自適應(yīng)能力.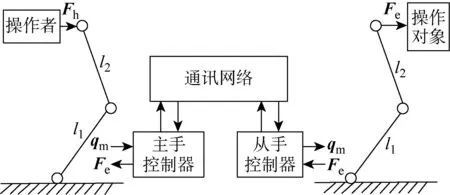



6 結(jié)語(yǔ)
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
流行色(2020年1期)2020-04-28 11:16:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03