基于Fisher兩類判別的機庫目標識別
2020-06-30 09:08:58高嘉彬孫夢南
科學技術與工程 2020年15期
高嘉彬, 潘 軍*, 孫夢南
(1.吉林大學地球探測科學與技術學院,長春 130026;2.北京北機機電工業有限責任公司,北京 101109)
機庫是機場內用于檢修飛機、保障飛行的主要建筑,是軍事打擊的重點,也是在遙感影像上需要被解譯的重要目標之一。如何定量構建機庫目標的識別特征,以及采用何種方法識別是當前需要解決的科學問題。目前,基于高分可見光遙感影像的目標識別方法,主要是利用形狀、大小等幾何特征而較少使用波譜特征[1-3]。文獻[4]提出的機庫目標識別方法也是基于空間特征而非波譜特征。對此,需要研究是否可以利用波譜特征識別高分可見光遙感影像中的機庫目標。通過選取訓練樣本分析機庫目標與其他地物之間的波譜差異,根據機庫目標在特征空間上與少量地物存在一定區分難度的情況,選用Fisher兩類判別法進行分類識別。針對常規的Fisher兩類判別法在聚類后判別結果不夠精確的情況,構建逐層剝離法對其進行改進,以實現利用波譜特征識別出高分可見光影像上機庫目標的目的。
1 機庫目標及其識別特征
飛機修理庫,簡稱機庫,是飛行維修區的主要建筑,機場的重要組成部分之一。機庫是用于對飛機進行定期檢修的大跨度單層建筑物,多為鋼筋混凝土結構,數量隨機場具體情況而定。機庫通常位于機場的一側,周圍有停機坪,并有滑行道相連接。機庫的建筑樣式可分為單跨和多跨,庫房面積一般較大,頂部多為鋼結構,形式主要有單坡面式、雙坡面式、多坡面式和拱形等。機庫通常由維修機庫大廳、航材庫以及與之配套的辦公、車間、動力站房、特種車庫和餐廳等附屬用房組成。
在目視解譯時,通常是根據形狀、大小、顏色、陰影、位置和活動等特征來識別目標[5]。這些識別特征又可以分為幾何特征和波譜特征。機庫在可見光遙感影像上反映出的波譜特征主要是顏色特征,是由其頂部的建筑材料涂裝所決定的。在同一幅遙感影像上,機庫目標通常具有相同的顏色,雖然由于建筑頂部樣式等原因會產生細微變化,但總體顏色大致相同,且同一坡面一般呈單一均勻色調。這種顏色特征使得機庫目標與周圍背景存在差異,可以被區分識別。
在計算機解譯時,目標的識別特征一般由目視解譯的識別特征決定。機庫目標的顏色特征實際上是構成機庫目標像元的各波段地物灰度值(DN)的綜合反映。而計算機目標識別的本質是對像元的重分類,且基于波譜特征的分類方法通常有閾值分割法和特征空間聚類法等[6]。對此,通過分析影像上機庫目標和其他地物的像元DN的分布情況,以判斷機庫與其他地物之間是否具有可分性并選擇適當的分類方法。
2 典型地物波譜特征分析
2.1 訓練樣本的選取
選用“吉林一號”衛星獲取的某機場可見光衛星影像,如圖1所示。該影像有藍(B1:450~520 nm)、綠(B2:520~600 nm)、紅(B3:630~690 nm)三個波段,空間分辨率0.72 m。在影像上,機庫目標主要有白色和紅色2種顏色的屋頂。結合研究區域內的目標情況,選取具有代表性的10類地物作為訓練樣本,分別記為白頂機庫、紅頂機庫、飛機、道路、植被、裸地、跑道、停機坪、白頂建筑和紅頂建筑。

圖1 某機場可見光衛星影像圖Fig.1 Visible satellite image of an airport
2.2 灰度分布特征
灰度閾值法是一種基于像素的灰度值對影像進行分類的方法,主要是反映單波段上目標像元的分布特征。假設目標與背景之間的像元灰度值在總體分布上存在一定差異,那么根據這種差異設定分割閾值,可以將目標與背景分開。該方法計算簡單,應用廣泛,對于目標與背景存在明顯對比的影像十分適用[7]。通過統計訓練樣本在各波段上的DN得到灰度分布圖(圖2)。由圖2可以看出,在機庫目標的灰度分布區間內,也有其他較多地物的灰度分布。這表明看出,在各單一波段上機庫目標與其他地物的對比并不明顯,不能通過設定閾值將機庫目標與其他地物分割開,即無法利用灰度閾值法對機庫目標進行分類識別。
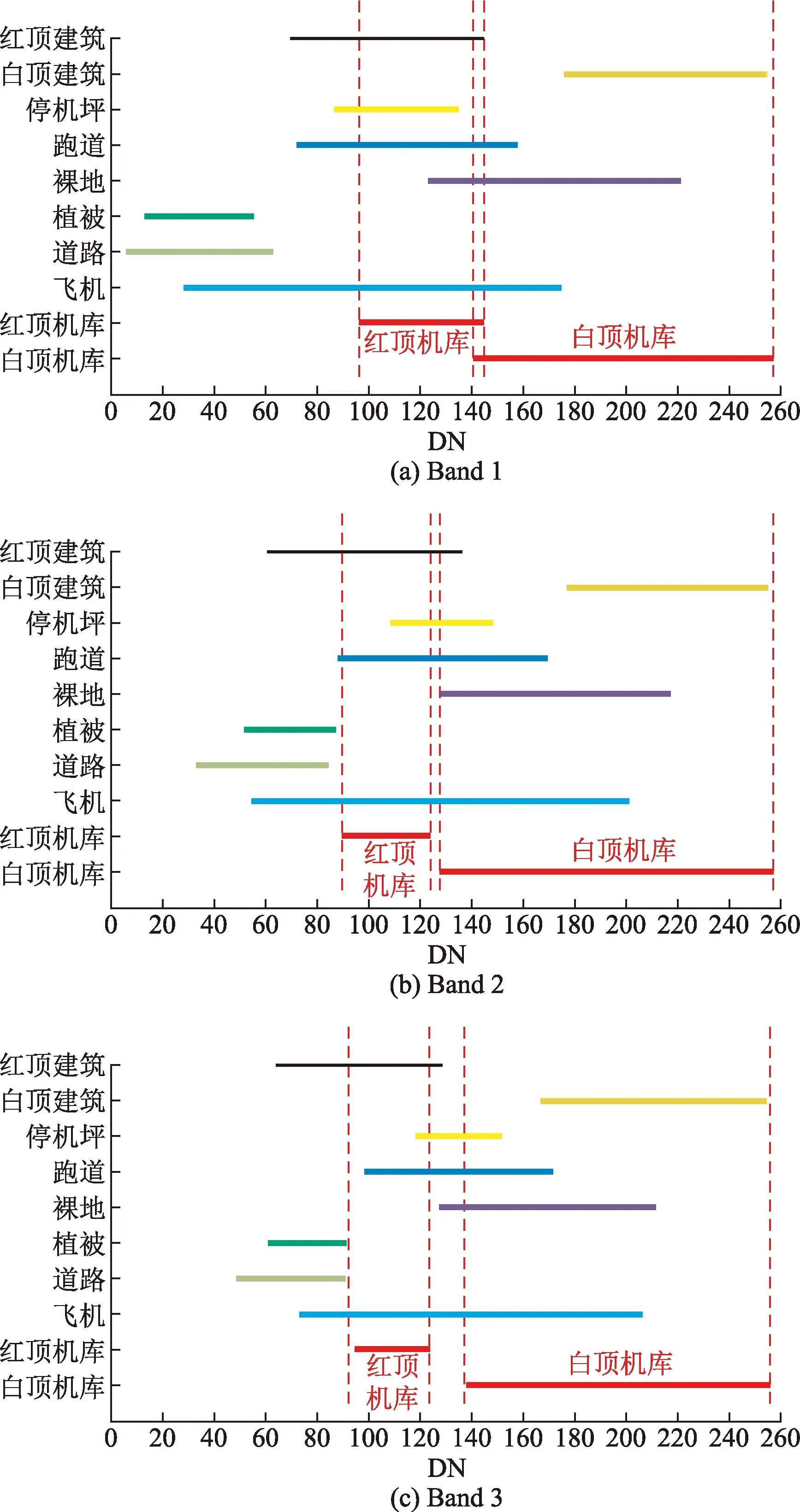
圖2 各訓練樣本不同波段灰度分布Fig.2 Gray-scale distribution of training samples in different bands
2.3 點群分布特征
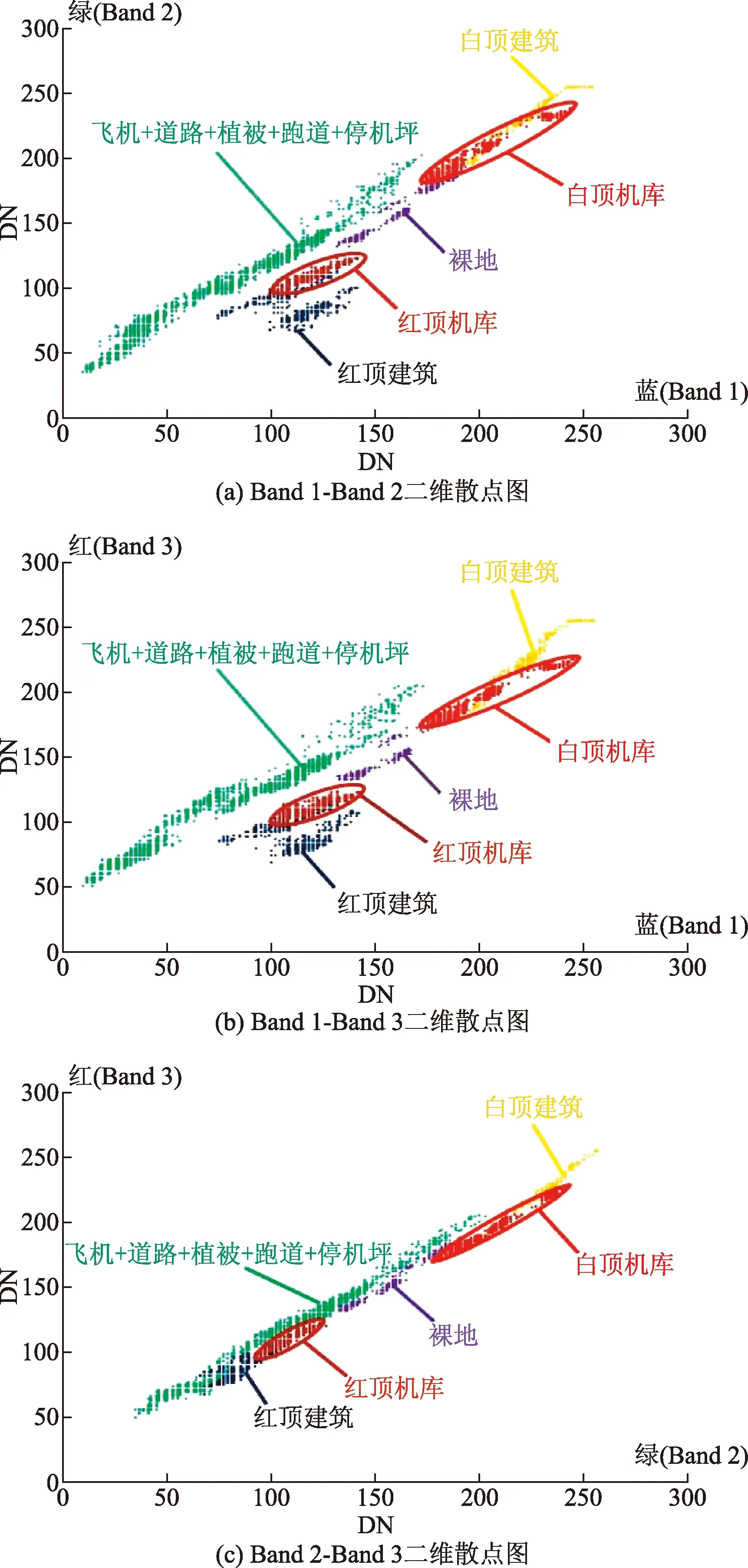
圖3 各訓練樣本二維散點圖Fig.3 Two-dimensional scatter plots of training samples
遙感影像可以看作由波段和灰度值構成的特征空間,其中波段代表特征空間坐標軸,灰度代表坐標取值,像元則是分布在特征空間上的點。與灰度閾值法不同,特征空間聚類法主要是反映了多波段下目標像元的分布特征。由于同類地物一般具有相似的波譜特性,其像元在特征空間上會聚集為點群,可以采用決策理論或統計方法將這些點群區分開。通過統計訓練樣本各波段的DN并將各波段兩兩組合,得到二維散點圖,如圖3所示。這些二維散點圖是三個波段構成的特征空間向任意兩個波段構成的二維平面的投影。這些點群在各二維平面上的分布位置不同,可以得出這些點群在三維的特征空間中是分離開的,即可以利用波譜特征識別機庫目標。通過計算訓練樣本Jeffries Matusita和Transformed Divergence的值可以進一步判斷訓練樣本之間區分的難易程度。這兩個值大小在0~2.0,數值越大則樣本越容易區分,通常認為在1.8以上即可以達到良好的區分效果。而機庫目標與其他大部分地物的訓練樣本的值均在1.8以上,表明機庫目標與其他大部分地物目標較易區分。其中,機庫目標與飛機、道路、跑道、植被和停機坪等五類地物的點群較易區分;而白頂機庫與白頂建筑、裸地,紅頂機庫與紅頂建筑的點群分布相對較近且分離度均小于1.8,存在一定分離難度。這也與目視解譯時觀察到的情況基本一致。基于以上分析結果,分類難點主要是機庫目標與少數地物之間,而在多光譜影像中Fisher兩類判別法可以對類似情況實現較為準確的分類識別[8]。因此選用更適合在少數樣品間分類的Fisher兩類判別法對影像進行分類。
3 Fisher兩類判別法
3.1 基本原理
Fisher兩類判別法由Fisher在1936年提出,是根據樣品的多個特征確定待分樣品歸屬的一種監督分類方法[9]。Fisher判別的核心思想是降維,即將樣品在多維變量空間上的觀測值投影到低維空間(直線)上,使得兩類樣品的點群得以顯著區分。如圖4 所示的二維情況為例,設有A、B兩類總體,其在各軸上的投影均有重疊,無論利用變量x1或x2,均不能得到很好區分。但是若投影到直線R上,則兩類樣品投影差別顯著,并可找到分界點R0。這就相當于尋找線性組合R=c1x1+c2x2,使兩類樣品顯著區分,并根據特征值x1、x2進行計算,與R0比較來判定未知樣品的歸屬。
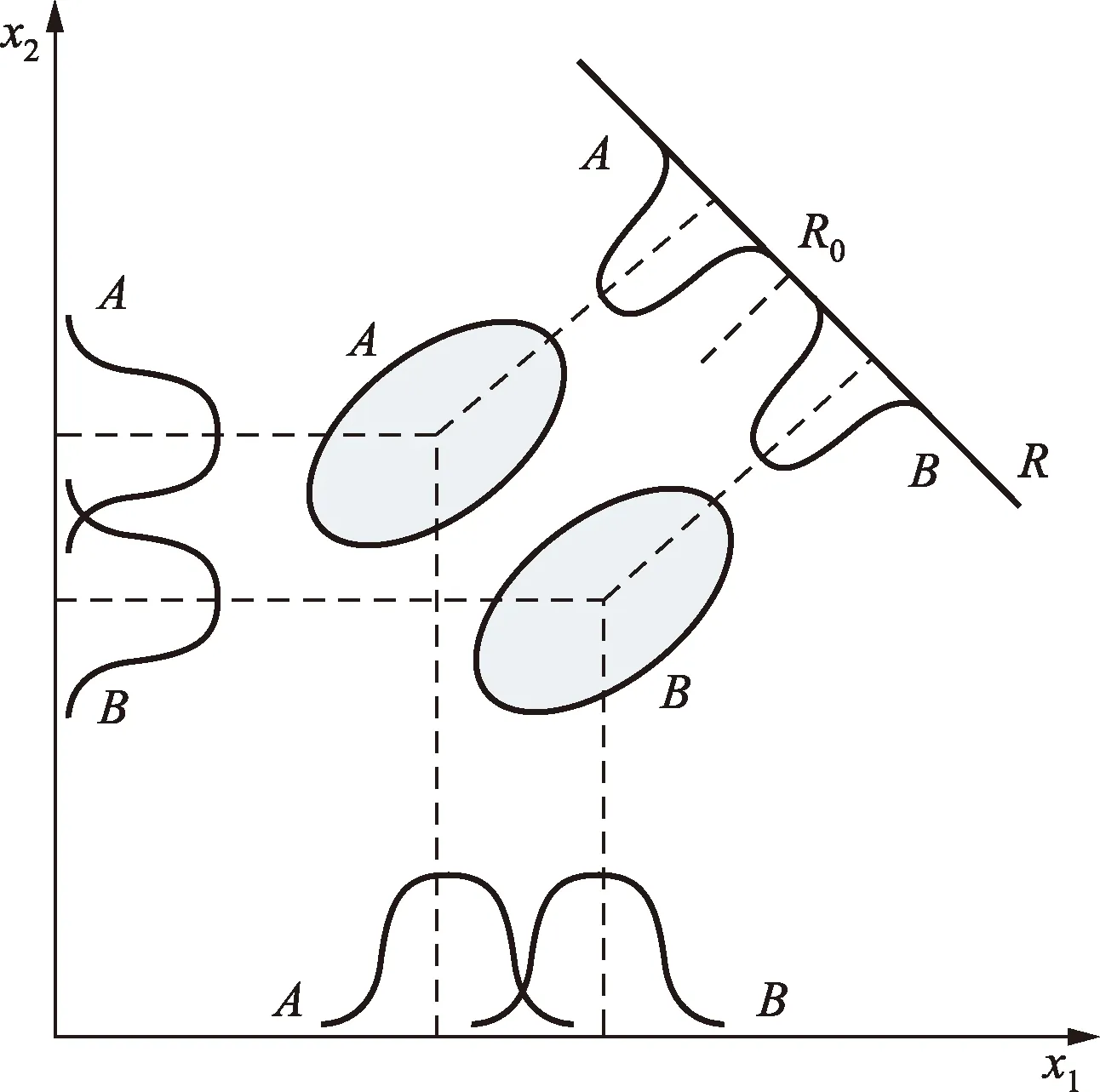
圖4 Fisher兩類判別原理圖Fig.4 Fisher two kinds of discrimination princeples
3.2 判別函數

設判別函數為
R=c1x1+c2x2+…+cmxm
(1)

(2)
則判別函數的類間離差為
(3)
而判別函數的類內離差為
(4)
為建立最優的判別函數,應使函數類間離差最大、類內離差最小,即I=Q/F達到極大,推導可得:
(5)
式(5)中:
(6)
式(2)的矩陣形式為Lc=d。當L滿秩時,有唯一解c=L-1d,從而可求得判別函數R。
3.3 判別準則
(7)
式(7)中:σA=(FA/nA)1/2,σB=(FB/nB)1/2。

對于判別效果,可以用錯判率E來檢驗。
(8)
式(8)中:ne為錯判樣品個數;n為已知歸屬的樣品數。E越小則判別效果越好。
4 實驗過程及結果分析
4.1 常規的Fisher兩類判別法
常規的方法是指在利用Fisher兩類判別法對多類樣品進行判別時的通常方法。該方法先通過對樣品的聚類分析以減少每次判別時的樣品數量,使得每次判別只在兩到三類間進行。然后根據聚類結果,對包含目標樣品的類別逐級區分,直到區分出目標樣品。以下是利用常規方法進行的實驗。
(1)利用各訓練樣本不同波段的灰度均值作為其特征空間的點群中心,通過Ward法(最小離差平方和法)進行聚類分析,如圖5所示。
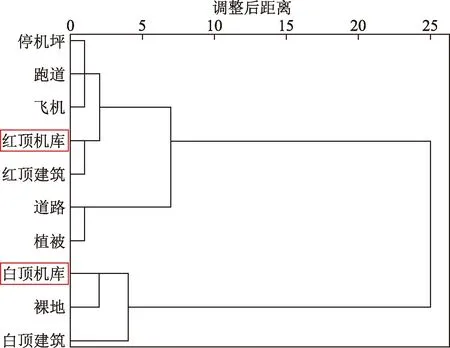
圖5 10類地物聚類譜系圖Fig.5 10 classes of ground objects cluster genealogy
(2)根據聚類結果以每次分類為節點,利用Fisher兩類判別法逐級分類識別。①將停機坪、跑道、飛機、紅頂機庫、紅頂建筑、道路、植被與白頂機庫、裸地、白頂建筑進行分類識別,記為1-1;將白頂機庫、裸地與白頂建筑進行分類識別,記為2-1;②將停機坪、跑道、飛機、紅頂機庫、紅頂建筑與道路、植被進行分類識別,記為2-2;③將白頂機庫與裸地進行分類識別,記為3-1;④將停機坪、跑道、飛機與紅頂機庫、紅頂建筑進行分類識別,記為3-2;將紅頂機庫與紅頂建筑進行分類識別,記為4-1。
(3)將B1、B2、B3三個波段的值分別記為x1、x2、x3,計算出Fisher判別函數式和判別系數,結果如表1所示。
(4)將Fisher判別結果代入到影像中運算得到結果,如圖6所示,其中紅色標記部分為被識別出的像元。
4.2 逐層剝離Fisher兩類判別法
從利用常規方法的實驗中可以看出影像中被錯分的像元較多。這是因為聚類后形成的新點群集合包含了多類樣品,導致在判別時投影方向的選擇和函數的建立并不一定針對目標樣品,使得在新點群間進行判別分類時產生誤差。這些誤差逐步累積最終影像了分類結果的精度。針對這一情況,構建逐層剝離法對其進行改進。
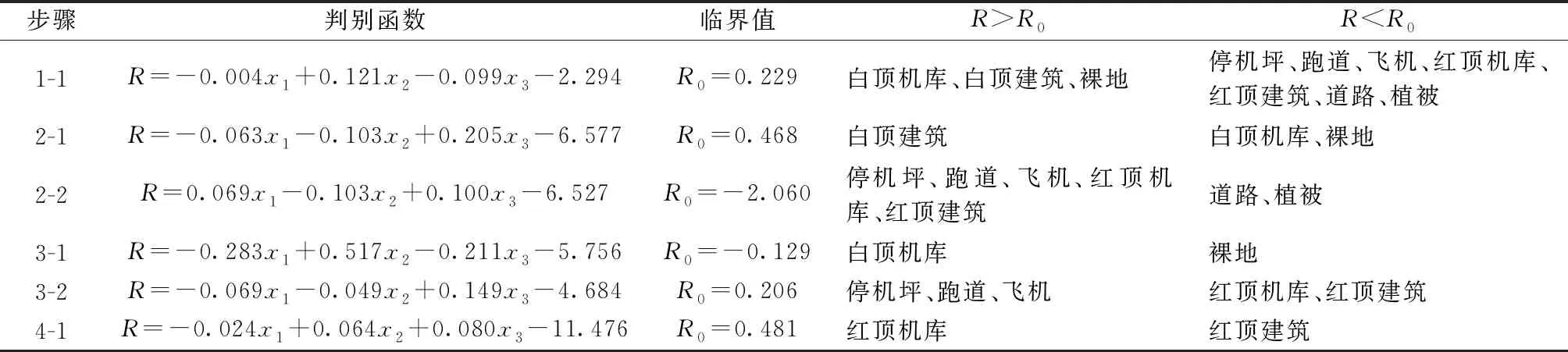
表1 常規Fisher兩類判別結果表Table 1 Two classes of discriminant result for conventional Fisher
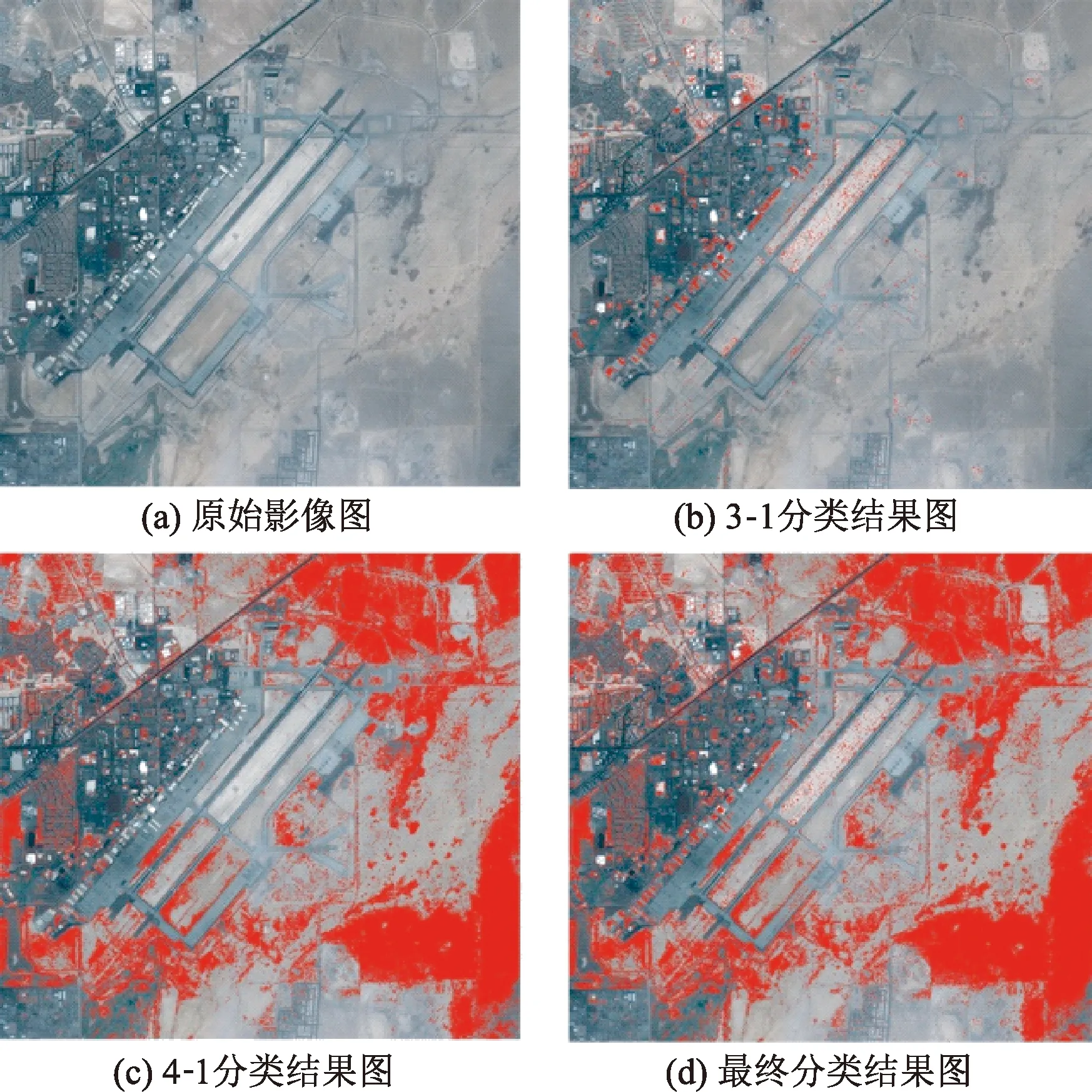
圖6 常規Fisher兩類判別結果Fig.6 Result of two classes of discriminant method for conventional Fisher
逐層剝離法是指以識別目標為核心,不進行聚類分析,而是直接將目標樣品與其他地物兩兩之間逐個判別分類,通過剝離其他地物的干擾,即在特征空間中劃定一個只包含目標點群的區域達到分類識別的目的。這種方法實質上仍然是在兩類樣品間進行分類判別,但是判別依據僅是各個樣品的點群分布特征且只在兩類樣品間進行,這就使得無論是投影方向的選擇和判別函數的建立都要更加準確,識別精度也就更高。以下是利用常規方法進行的實驗。
(1)將紅頂機庫與白頂機庫進行分類,記為1-1。
(2)將白頂機庫分別與其他訓練樣本進行分類,分別記為2-1(飛機)、2-2(道路)、2-3(植被)、2- 4(裸地)、2-5(跑道)、2- 6(停機坪)、2-7(紅頂建筑)和2- 8(白頂建筑)。
(3)將紅頂機庫分別與其他訓練樣本進行分類,分別記為3-1(飛機)、3-2(道路)、3-3(植被)、3- 4(裸地)、3-5(跑道)、3- 6(停機坪)、3-7(白頂建筑)和3- 8(紅頂建筑)。
(4)將B1、B2、B3三個波段的值分別記為x1、x2、x3,計算出Fisher判別函數式和判別系數,結果如表2所示。
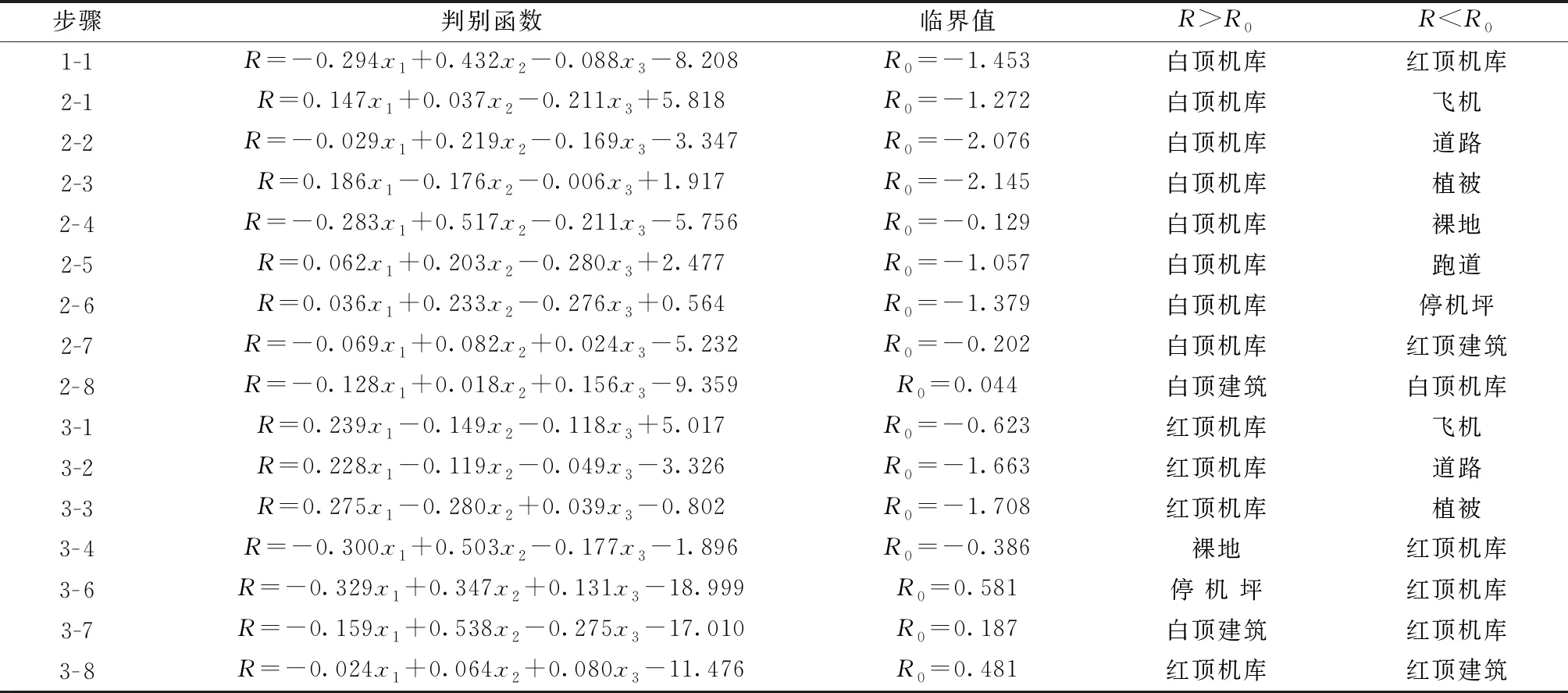
表2 逐層剝離法Fisher判別結果Table 2 Fisher discriminant result of layer-by-layer stripping method
(5)將Fisher判別結果代入到影像中運算得到結果,如圖7所示,其中紅色標記部分為被識別出的像元。
4.3 實驗結果分析
通過目視解譯和掌握資料得出該機場共有機庫19座,如圖8所示,其中黃色標記部分為機庫,并以此作為驗證識別結果精度的標準。經過分別統計兩種方法結果中的機庫實際總像元數、分類識別總像元數、正確分類識別像元數和錯誤分類識別像元數,并計算正確分類/分類總數、正確分類/實際總數和E得到基于像元的分類結果統計如表3所示。其中,逐層剝離法與常規方法相比較,分類識別
的總像元數由14 786 495個降至2 220 938個,但正確分類識別的像元數由83 428提高至83 656個,正確分類與分類總數的比例提高了3.21%,且E下降了0.21%。這表明逐層剝離法的分類精度和效率均優于常規方法。通過目視解譯對比分析發現,逐層剝離法對影像中的裸地、植被等地物具有更好的區分效果。這是因為逐層剝離法能夠減少常規方法中因聚類分析后判別而產生的誤差,并且通過減少每次參與判別的樣品數以提高判別精度。但是無論是常規法還是逐層剝離法,在最后的結果中仍有其他地物的像元被錯分進來。這表明僅利用波譜特征并不能完全準確識別出機庫目標,在日后研究中可以進一步結合機庫目標的幾何識別特征提高識別精度。
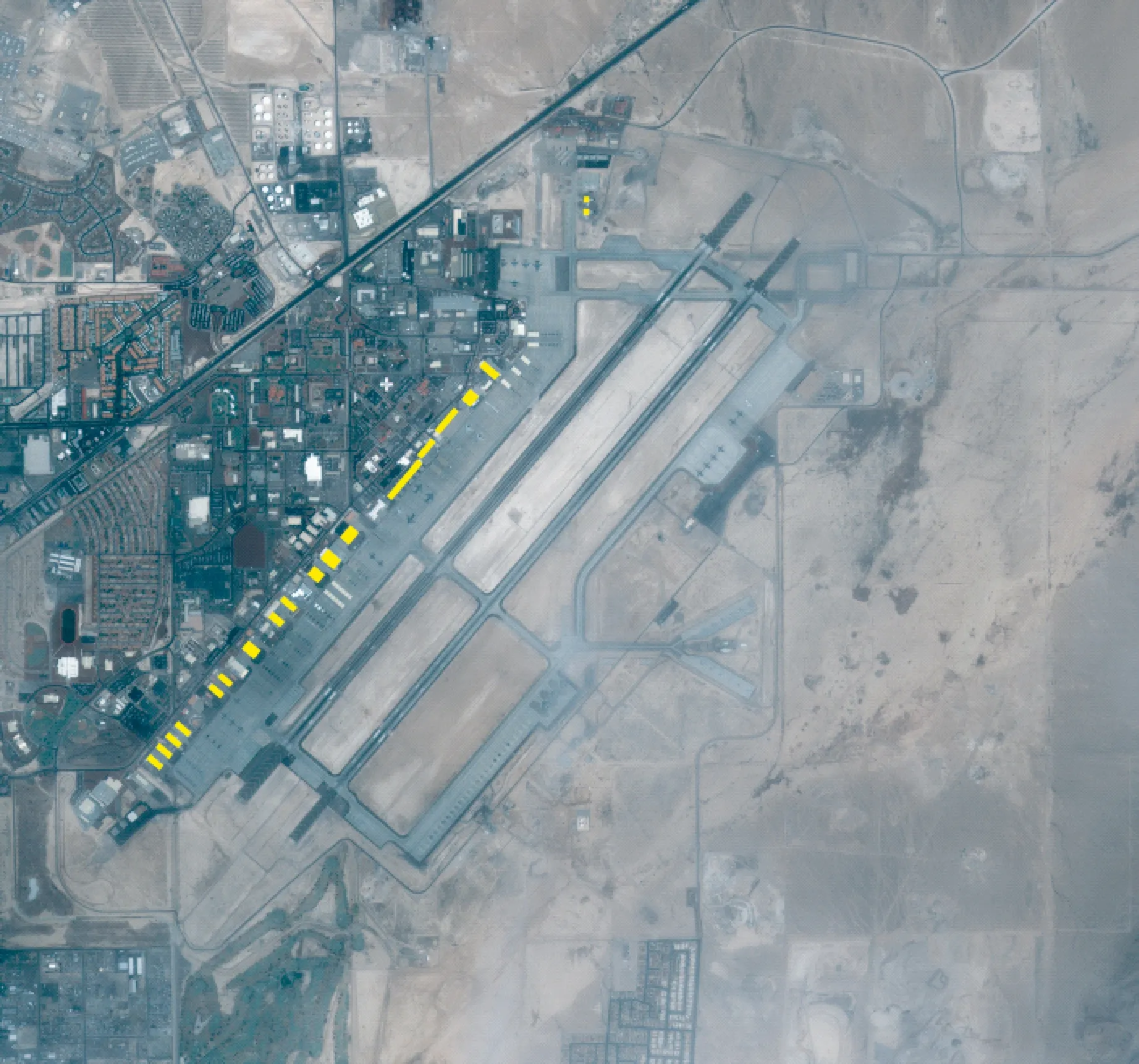
圖8 某機場機庫目標位置示意Fig.8 The target location of an airport hangar

表3 基于像元的分類結果統計Table 3 Pixel-based statistic of classification results
5 結論
通過上述研究,得出以下結論。
(1)在高分可見光遙感影像中,利用波譜特征并結合Fisher兩類判別法可以有效識別出機庫目標,正確識別像元數占機庫目標實際像元數的77%以上。
(2)在針對多類樣品進行Fisher兩類判別時,逐層剝離法雖然在計算上較常規方法略微復雜,但錯分像元數能夠減少85%以上,具有更高的識別的精度和效率。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
世界科學技術-中醫藥現代化(2020年2期)2020-07-25 02:05:36
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
