基于改進(jìn)灰狼優(yōu)化算法的區(qū)域監(jiān)測(cè)機(jī)器人路徑規(guī)劃
2020-06-29 08:58:56李靖,楊帆,2*
科學(xué)技術(shù)與工程 2020年15期
李 靖, 楊 帆,2*
(1.河北工業(yè)大學(xué)電子信息工程學(xué)院,天津 300401;2.河北工業(yè)大學(xué)天津市電子材料與器件重點(diǎn)實(shí)室,天津 300401)
路徑規(guī)劃是機(jī)器人控制領(lǐng)域研究的重點(diǎn)和熱點(diǎn)問(wèn)題,也是機(jī)器人順利完成各項(xiàng)作業(yè)任務(wù)的前提條件。按照算法的基本原理,可以將路徑規(guī)劃算法分為傳統(tǒng)算法、圖形學(xué)算法、群智能算法以及深度學(xué)習(xí)算法。傳統(tǒng)算法主要有人工勢(shì)場(chǎng)法[1]、模糊邏輯算法[2]、禁忌搜索算法[3]等,其缺點(diǎn)在于建模困難,具有一定的局限性。圖形學(xué)算法主要有C空間法[4]、自由空間法[5]、柵格法[6]、voronoi圖法[7]等,其優(yōu)點(diǎn)在于建模簡(jiǎn)單,但其搜索能力不足,對(duì)于大規(guī)模任務(wù)量的路徑搜索具有局限性。群智能算法主要有粒子群算法(particle swarm optimization,PSO)[8]、蟻群算法(ant colony optimization,ACO)[9]、遺傳算法(genetic algorithm,GA)[10]、鯨魚(yú)算法(whale optimization algorithm,WOA)[11]、灰狼優(yōu)化算法(grey wolf optimizer,GWO)[12]等,運(yùn)用自然啟發(fā)的智能仿生學(xué)算法,往往可以解決環(huán)境相對(duì)復(fù)雜的場(chǎng)景,但是其計(jì)算量相對(duì)前兩種會(huì)更高些。此外,還有深度學(xué)習(xí)路徑規(guī)劃算法[13],其魯棒性最高,但需要大數(shù)據(jù)集的支撐,訓(xùn)練、驗(yàn)證、測(cè)試迭代導(dǎo)致時(shí)間復(fù)雜度大,且需要高要求的硬件支撐,對(duì)小樣本數(shù)據(jù)集無(wú)法進(jìn)行無(wú)偏差的估計(jì)。
針對(duì)大任務(wù)量區(qū)域監(jiān)測(cè)場(chǎng)景,綜合考慮四類(lèi)路徑規(guī)劃算法的優(yōu)缺點(diǎn),群智能算法更加符合精度與速度的要求。楊桂華等[14]融合了確定性選擇與隨機(jī)性選擇策略,將改進(jìn)蟻群算法用于室內(nèi)移動(dòng)機(jī)器人路徑規(guī)劃算法。黃長(zhǎng)強(qiáng)等[15]改進(jìn)蟻獅算法進(jìn)行航跡規(guī)劃,將混沌調(diào)節(jié)因子引入螞蟻群體,將反調(diào)節(jié)因子引入蟻獅行為中,提高了探索能力和開(kāi)發(fā)能力。余勝東等[16]提出了應(yīng)用混沌螢火蟲(chóng)算法的無(wú)人機(jī)航跡規(guī)劃,引入立方映射混沌算子來(lái)提高了局部搜索能力和魯棒性。
GWO算法自提出以來(lái),就因其在尋優(yōu)的良好性能,結(jié)構(gòu)簡(jiǎn)單,易實(shí)現(xiàn)等優(yōu)點(diǎn)被廣泛關(guān)注。GWO算法在收斂速度和求解精度上優(yōu)于PSO算法已經(jīng)被驗(yàn)證[12],但其仍具有提升空間。如王秋萍等[17]采用余弦規(guī)律的搜索因子,引入了動(dòng)態(tài)權(quán)重策略,平衡全局搜索和局部開(kāi)發(fā)能力,提高了GWO算法的求解精度。郭振洲等[18]運(yùn)用指數(shù)函數(shù)衰減搜索因子α,使收斂因子隨著迭代次數(shù)的增加非線性動(dòng)態(tài)變化,在搜索與開(kāi)發(fā)階段尋求平衡,以確保逼近最優(yōu)解。徐松金等[19]引入了隨機(jī)收斂因子以平衡搜索能力,引入了差分變異進(jìn)行個(gè)體更新,以提高算法收斂與精確度。
基于上述分析,提出了一種基于改進(jìn)灰狼優(yōu)化算法的區(qū)域監(jiān)測(cè)機(jī)器人路徑規(guī)劃方法。首先引入Logistic混沌映射、自適應(yīng)調(diào)整策略、靜態(tài)加權(quán)平均權(quán)重策略改進(jìn)灰狼優(yōu)化算法,隨后將機(jī)器人載電量、路徑長(zhǎng)度短作為約束,引入K-means算法進(jìn)行任務(wù)聚類(lèi),通過(guò)改進(jìn)的灰狼優(yōu)化算法(improved grey wolf optimizer,IGWO)算法對(duì)模型進(jìn)行離線求解,規(guī)劃出路線,將大任務(wù)量監(jiān)測(cè)作業(yè)自動(dòng)轉(zhuǎn)換成分時(shí)分步作業(yè),為機(jī)器人自動(dòng)自主區(qū)域監(jiān)測(cè)任務(wù)奠定了基礎(chǔ)。
1 問(wèn)題建模
假設(shè)區(qū)域工作環(huán)境地圖已知,T={T1,T2,…,Tn}為任務(wù)點(diǎn)集合,O為機(jī)器人投放點(diǎn)(起點(diǎn))位置,要求Robot遍歷n個(gè)任務(wù)點(diǎn),且需回到起點(diǎn),遍歷路徑為R={O,T1,T2,…,Tn,O},則路徑長(zhǎng)度L為
(1)
以機(jī)器人電量消耗進(jìn)行約束,機(jī)器人作業(yè)需要消耗電量,機(jī)器人全程作業(yè)任務(wù)消耗到電量為
q=ruL
(2)
式(2)中:ru為機(jī)器人單位距離消耗的電量。
為了機(jī)器人能夠順利完成任務(wù)并能返回出發(fā)地聚集,要求機(jī)器人作業(yè)任務(wù)的電量消耗q,要小于機(jī)器人帶電量Q,可以表示為
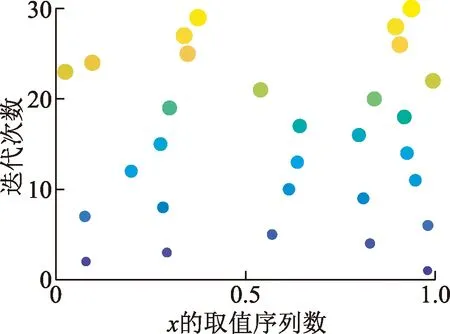
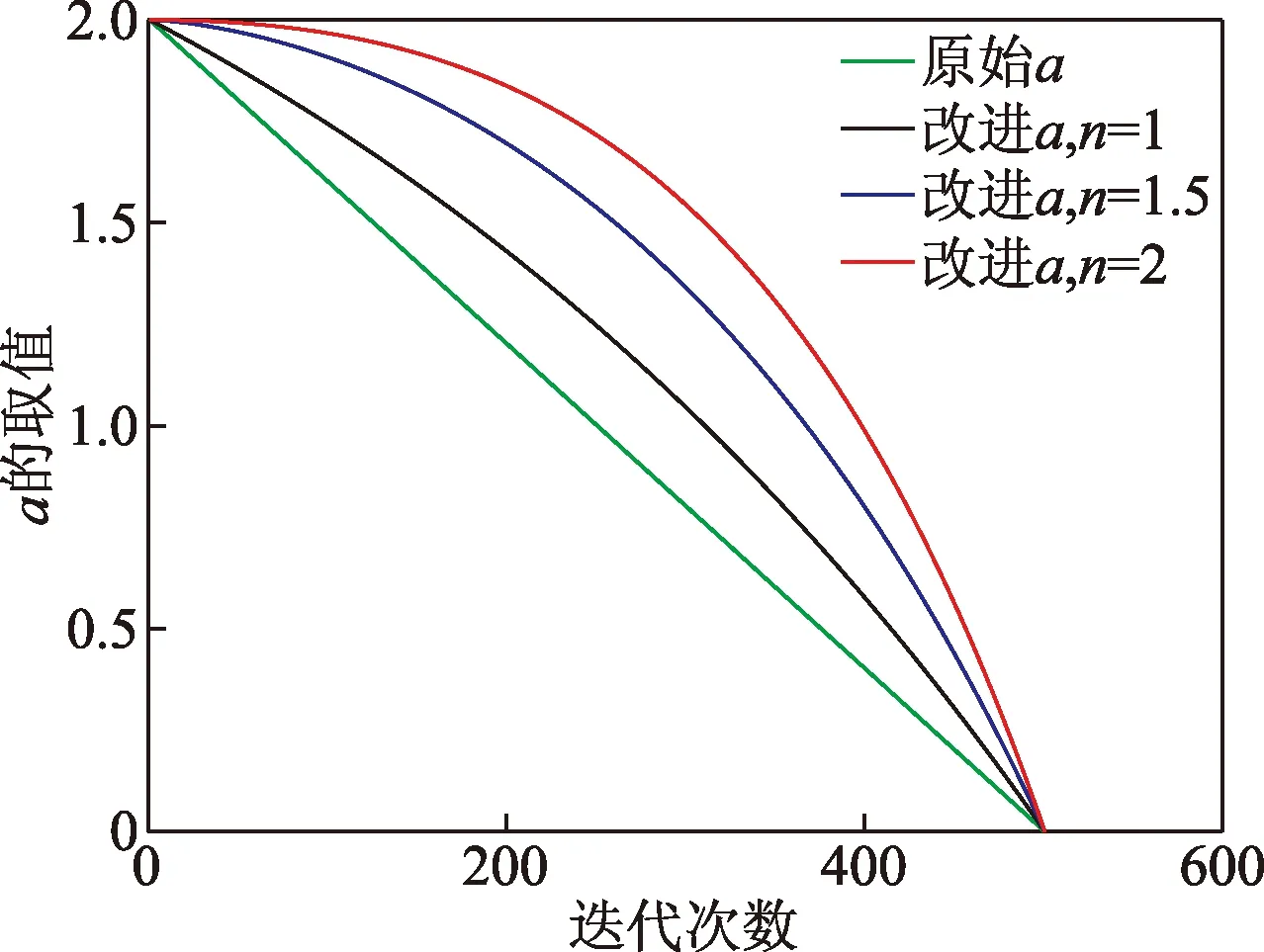
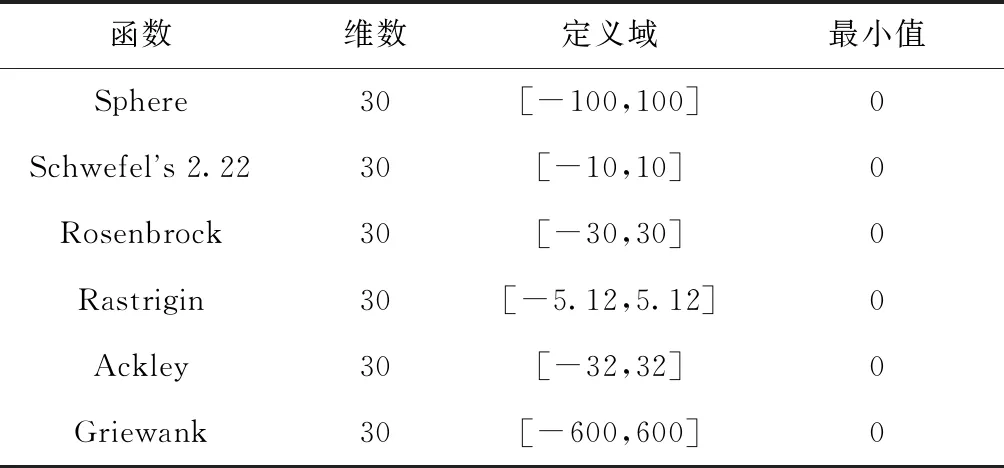
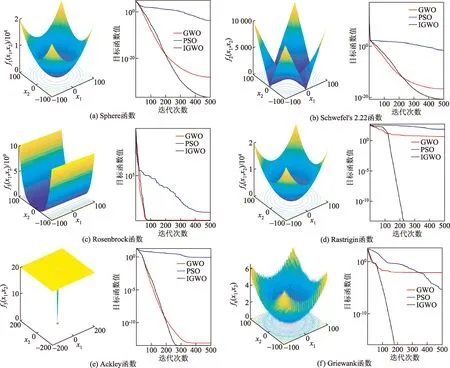
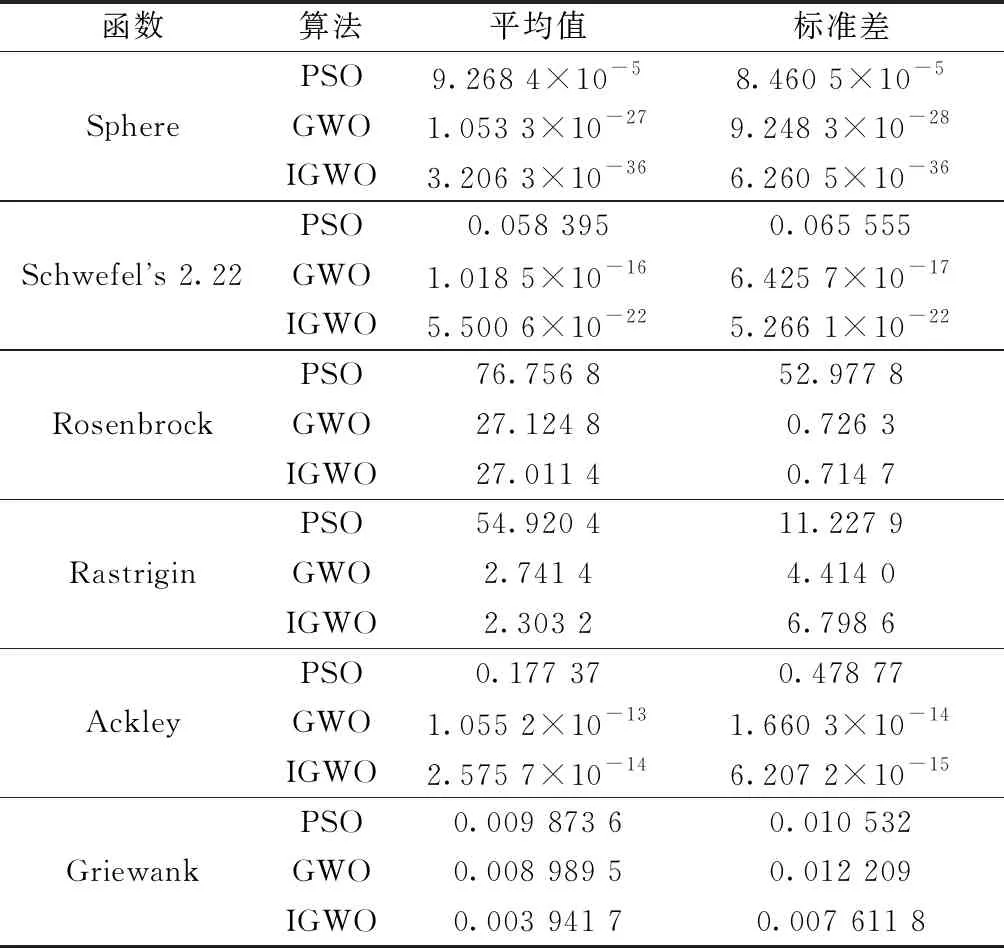
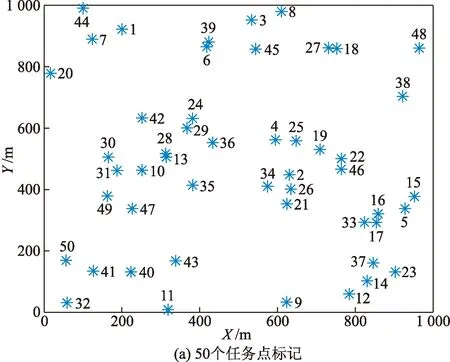
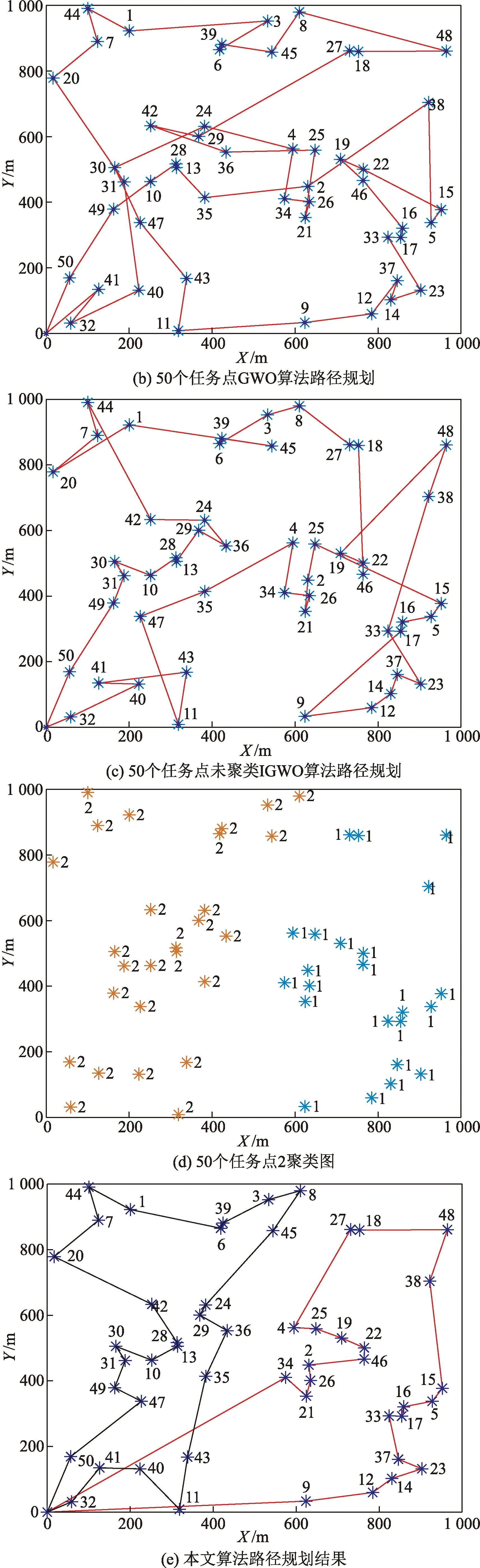
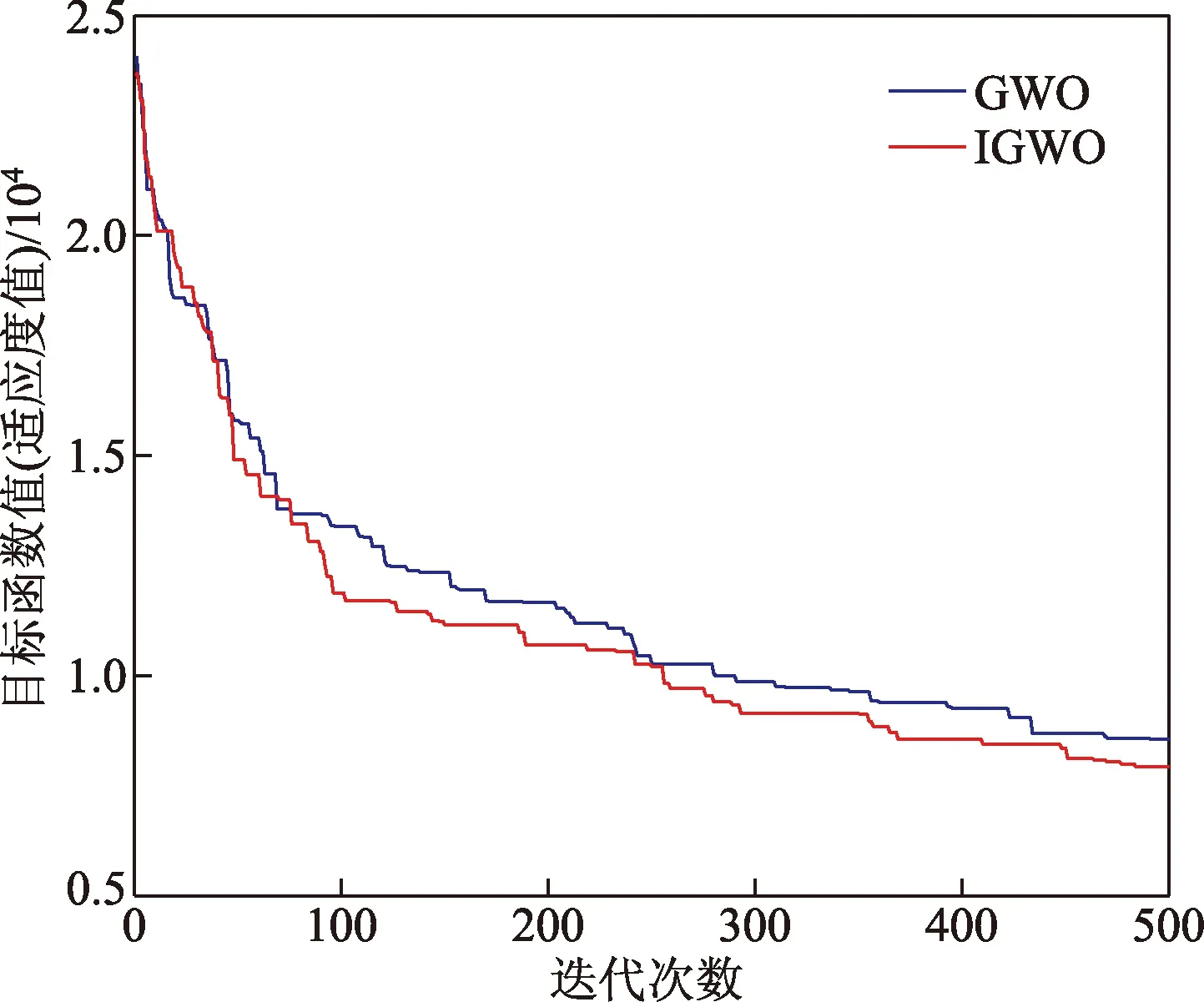
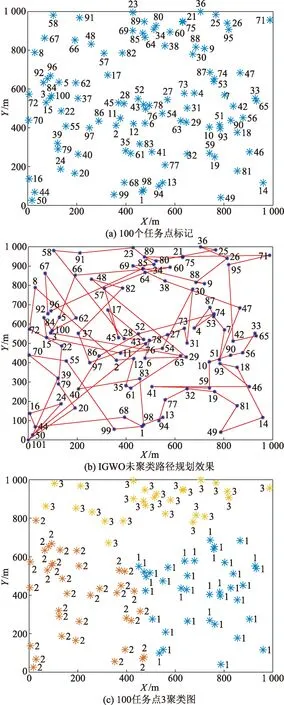
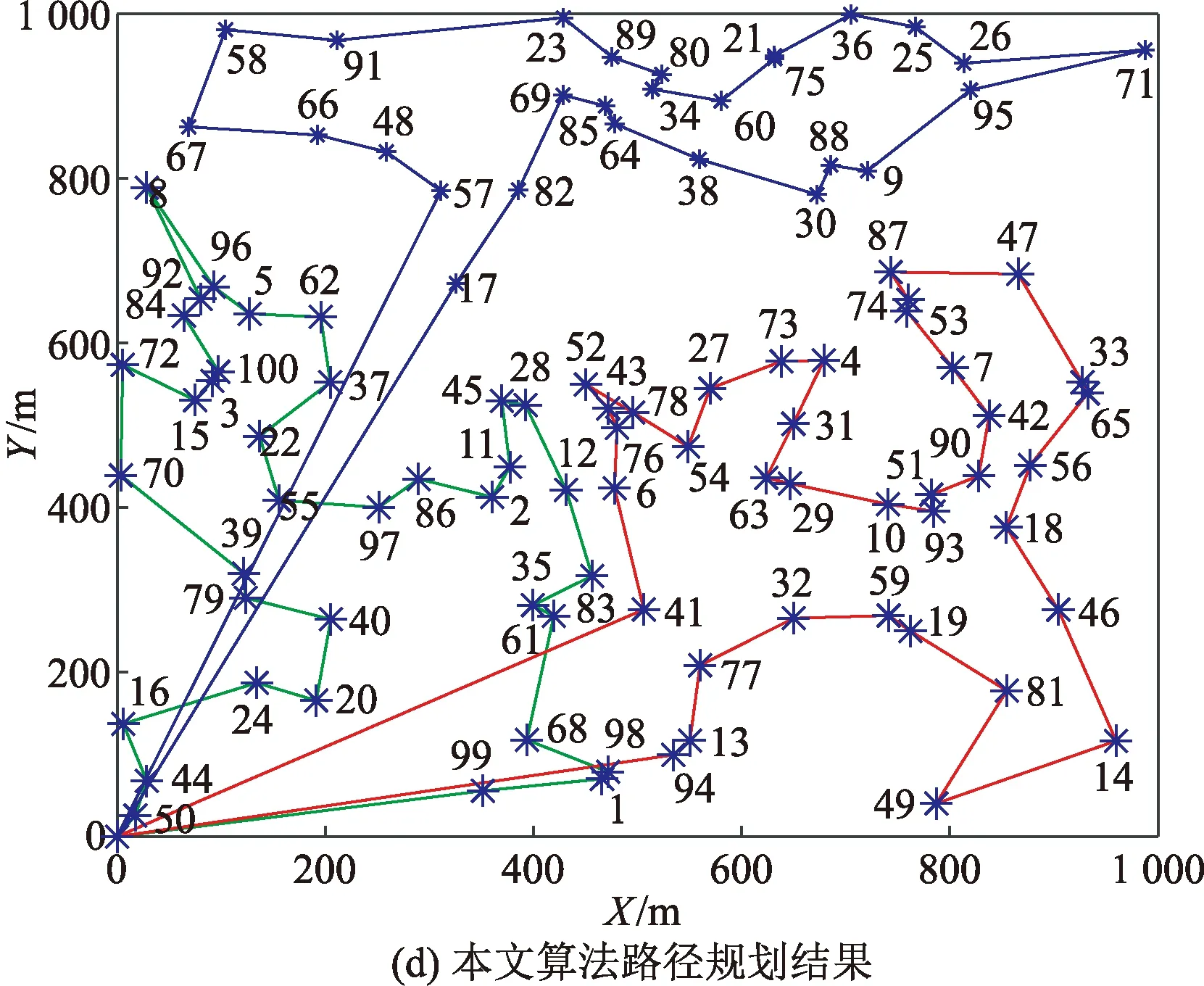
q (3) 以大任務(wù)量巡查監(jiān)測(cè)作業(yè)為背景,通過(guò)機(jī)器人定點(diǎn)巡視,當(dāng)發(fā)現(xiàn)異常點(diǎn),便調(diào)度臨近的機(jī)器人群到達(dá)指定異常點(diǎn)進(jìn)行檢查,排除故障,實(shí)現(xiàn)自動(dòng)監(jiān)測(cè),自主完成作業(yè)的目的。首先改進(jìn)傳統(tǒng)灰狼優(yōu)化算法,加強(qiáng)求解能力;隨后通過(guò)改進(jìn)的灰狼優(yōu)化算法求解在電量約束下的問(wèn)題建模模型,遍歷任務(wù)點(diǎn)進(jìn)行監(jiān)測(cè),發(fā)現(xiàn)異常點(diǎn)派遣臨近機(jī)器人群避障到達(dá)異常點(diǎn),以便排除故障。 2.1.1 GWO算法的等級(jí)結(jié)構(gòu) 灰狼優(yōu)化算法[12]是模擬食物鏈頂端的捕食者狼群的捕食行為產(chǎn)生的算法。灰狼大都喜歡群居,且具有非常嚴(yán)格的社會(huì)等級(jí)制度,如圖1金字塔結(jié)構(gòu)的等級(jí)制度所示。 圖1 灰狼的社會(huì)等級(jí)結(jié)構(gòu)Fig.1 Hierarchy of gray wolf 2.1.2 GWO算法的數(shù)學(xué)模型 在GWO算法數(shù)學(xué)建模中,每只灰狼代表種群中 1 個(gè)候選解,將最優(yōu)解視為α,第二、第三個(gè)最佳候選解視分別為β和δ,其余的候選解視為ω。在GWO算法中,搜索(優(yōu)化)由α、β和δ引導(dǎo),ω狼跟隨這三只狼。 D=|CXp(t)-X(t)| (4) X(t+1)=Xp(t)-AD (5) 式(5)中:t表示當(dāng)前迭代次數(shù);A和C為系數(shù)向量;Xp為獵物的位置向量;D為灰狼個(gè)體與獵物之間的位置關(guān)系向量;X為灰狼的位置向量。A、C計(jì)算公式為 A=2ar1-a (6) C=2r2 (7) 式中:r1和r2的模是[0,1]的隨機(jī)數(shù);a為收斂因子,其數(shù)值隨著迭代次數(shù)的增加從2線性減小到0,計(jì)算公式為 (8) 式(8)中:t為當(dāng)前迭代次數(shù);tmax為最大迭代次數(shù)。 灰狼追蹤獵物位置的數(shù)學(xué)模型描述如式(9)~式(11)所示: {Dα=|C1Xa-X| Dβ=|C2Xβ-X| Dδ=|C3Xδ-X| (9) {X1=Xα-A1Da X2=Xβ-A2Dβ X3=Xδ-A3Dδ (10) (11) 式中:C1、C2、C3為隨機(jī)向量;Dα、Dβ和Dδ分別為α狼、β狼和δ狼與狼群其他成員之間的距離;Xα、Xβ、Xδ分別為α狼、β狼和δ狼的位置;X為當(dāng)前狼的位置。狼群中ω狼的位置由α狼、β狼和δ狼共同決定。 2.2.1 基于Logistic映射的種群初始化 混沌具有隨機(jī)性、遍歷性和規(guī)律性的特點(diǎn)。引入混沌序列,可以使初始種群個(gè)體盡可能地利用解空間的信息,改善全局搜索能力,由于Logistic映射[20]簡(jiǎn)單混沌且遍歷均勻性較好,因此在種群初始化時(shí),使用Logistic映射產(chǎn)生混沌序列,對(duì)狼群進(jìn)行種群位置初始化。Logistic映射的表達(dá)式如式(12)所示: xn+1=axn(1-xn) (12) 式(12)中:xn∈[0,1]為混沌變量;a=4。設(shè)x0=0.428 8。圖2為30個(gè)種群Logistic映射種群初始化后的氣泡圖。 圖2 基于Logistic映射的種群初始化氣泡圖Fig.2 Population initialization bubble diagram based on Logistic Mapping 2.2.2 控制參數(shù)自適應(yīng)調(diào)整策略 a對(duì)GWO算法全局搜索及局部開(kāi)發(fā)能力具有平衡作用,它隨著迭代次數(shù)的增加不斷地從2線性衰減到0,而迭代收斂的過(guò)程并不是線性的,因此,提出了一種非線性控制參數(shù)自適應(yīng)調(diào)整策略,如式(13)所示。通過(guò)調(diào)整a的自適應(yīng)值來(lái)平衡GWO算法的搜索能力和開(kāi)發(fā)能力,在迭代初期全局搜索時(shí),a較大,非線性變化速率快,全局搜索能力強(qiáng),避免局部最優(yōu),在迭代后期a較小,非線性變化速率慢,則在某個(gè)區(qū)域內(nèi)尋求最優(yōu)解,開(kāi)發(fā)能力強(qiáng),收斂速度加快。 (13) 式(13)中:t為當(dāng)前迭代次數(shù);Tmax為最大迭代次數(shù);n∈[1,2]為非線性調(diào)制指數(shù);ainitial為控制參數(shù)a的初始值,ainitial=2。a的非線性衰減對(duì)比如圖3所示。 圖3 控制參數(shù)a對(duì)比Fig.3 Contrast chart of control parameter a 2.2.3 靜態(tài)加權(quán)平均策略 加權(quán)平均策略的主要思想是為三個(gè)頭狼分配配重,以顯示金字塔的層次結(jié)構(gòu),這里引入文獻(xiàn)[17]的靜態(tài)加權(quán)平均策略,分配給α狼的權(quán)重為0.5,β狼的權(quán)重為0.3,則δ狼的權(quán)重為0.2,如式(14)所示: (14) K-means算法[21]是無(wú)監(jiān)督聚類(lèi)算法,不需要有任何的先驗(yàn)知識(shí),其原理思想是基于一種劃分的思想,以距離作為數(shù)據(jù)間相似性度量的標(biāo)準(zhǔn),數(shù)據(jù)間的距離越小,則表明相似性越高,則可以歸為一個(gè)類(lèi)簇。 根據(jù)問(wèn)題建模可知任務(wù)點(diǎn)樣本集T={T1,T2,…,Tn},假設(shè)聚類(lèi)集合為μ={μ1,μ2,…,μk} 距離函數(shù)為 (15) 式(15)中:Tm為第m個(gè)任務(wù);μi表示第i類(lèi)到聚類(lèi)中心。 聚類(lèi)中心更新公式為 (16) 準(zhǔn)則函數(shù)為 (17) 式中:xj表示第j類(lèi)樣本中的數(shù)據(jù)。 考慮機(jī)器人電量約束,通過(guò)檢查行駛路徑機(jī)器人所消耗的電量q是否大于機(jī)器人的載電量,如果q 圖4 問(wèn)題建模求解流程圖Fig.4 Flow chart of problem model solving 實(shí)驗(yàn)仿真環(huán)境為處理器Intel Corei7 CPU @1.8 GHz 2.0 GHz,內(nèi)存16 G,操作系統(tǒng)WIN10,64位,仿真軟件為MATLAB 2019a進(jìn)行仿真。 為了驗(yàn)證改進(jìn)灰狼優(yōu)化算法的性能,選取了國(guó)際上6個(gè)經(jīng)典基準(zhǔn)測(cè)試函數(shù)進(jìn)行測(cè)試,其中Sphere函數(shù)、Rosenbrock 函數(shù)、Schwefel’s 2.22函數(shù)為單峰測(cè)試函數(shù)、Rastrigin函數(shù)、Griewank函數(shù)和Ackley函數(shù)為多峰測(cè)試函數(shù),測(cè)試函數(shù)的維數(shù)、定義域如表1所示。分別對(duì)PSO算法,GWO算法及IGWO算法進(jìn)行了仿真測(cè)試,其測(cè)試結(jié)果對(duì)比如圖5所示,對(duì)比平均值及標(biāo)準(zhǔn)差如表2所示。其中,種群規(guī)模設(shè)置為30,最大迭代次數(shù)設(shè)置為500次。 Sphere 函數(shù): (18) Schwefel’s 2.22函數(shù): (19) Rosenbrock函數(shù): (20) Rastrigin函數(shù): (21) Ackley函數(shù): (22) Griewank函數(shù): (23) 表1 測(cè)試函數(shù)Table 1 Test function 圖5 基準(zhǔn)測(cè)試函數(shù)測(cè)試結(jié)果Fig.5 Benchmark function test results 表2 基準(zhǔn)測(cè)試函數(shù)優(yōu)化結(jié)果對(duì)比Table 2 Optimization comparison of test functions 實(shí)驗(yàn)結(jié)果表明,對(duì)于單峰測(cè)試函數(shù),IGWO算法的收斂速度及精度略高于GWO算法。而對(duì)于多峰測(cè)試函數(shù),IGWO算法的收斂速度遠(yuǎn)遠(yuǎn)高于PSO算法及GWO算法,效果更佳明顯。 假設(shè)環(huán)境地圖為1 000×1 000的區(qū)域內(nèi),模擬隨機(jī)生成50個(gè)任務(wù)點(diǎn)與100個(gè)任務(wù)點(diǎn)兩種情況進(jìn)行算法仿真(圖6~圖8)。起點(diǎn)坐標(biāo)設(shè)置為(0,0),一個(gè)機(jī)器人從起點(diǎn)坐標(biāo)逐一巡視任務(wù)點(diǎn),且能在任務(wù)完成后,回到起點(diǎn)坐標(biāo)處。 圖6 50個(gè)任務(wù)點(diǎn)路徑規(guī)劃效果Fig.6 Results of path planning for 50 task points 圖7 適應(yīng)度對(duì)比Fig.7 Comparison of fitness values 圖8 100個(gè)任務(wù)點(diǎn)路徑規(guī)劃效果Fig.8 Results of path planning for 100 task points 圖6為50個(gè)任務(wù)點(diǎn)仿真效果,通過(guò)GWO算法和IGWO算法對(duì)多任務(wù)點(diǎn)一次性遍歷的路徑長(zhǎng)度分別為7 782.746 3、8 709.361 4 m,IGWO算法比GWO算法規(guī)劃路徑長(zhǎng)度縮短了926.615 1 m,效率提升了10.64%。圖7為50個(gè)任務(wù)點(diǎn)GWO 算法與IGWO 算法的最優(yōu)適應(yīng)度值曲線對(duì)比,可以清晰地看出IGWO算法比GWO算法收斂更快,對(duì)模型的求解能力更強(qiáng)。在機(jī)器人最大載電量的限制下,規(guī)劃長(zhǎng)度遠(yuǎn)遠(yuǎn)大于已有機(jī)器人最大行走長(zhǎng)度 3 500 m,因此需要將任務(wù)點(diǎn)進(jìn)行聚類(lèi),將任務(wù)分時(shí)分步處理,任務(wù)點(diǎn)聚類(lèi)成2類(lèi)時(shí),滿(mǎn)足已有機(jī)器人最大路徑長(zhǎng)度(電量)約束,將搜索任務(wù)分成2次處理,第一次遍歷27個(gè)任務(wù)點(diǎn)進(jìn)行搜索,路徑為0—32— 41— 40—11— 43—35—36—29—24— 45— 8—3—39— 6—1— 44—7—20— 42—28—13—10—30—31— 49— 47—50—0,路徑長(zhǎng)度為3 485.164 2 m,第二次遍歷23個(gè)任務(wù)點(diǎn)進(jìn)行搜索,路徑為:0—34—21—26—2— 46—22—19—25— 4—27—18— 48—38—15—5—16—17—33—37—23—14—12—9—0,路徑長(zhǎng)度為3 489.207 6 m,兩次路徑長(zhǎng)度合計(jì)為6 974.371 8 m,比傳統(tǒng)GWO算法一次性直接遍歷路徑規(guī)劃長(zhǎng)度縮短了19.92%,比IGWO算法未任務(wù)點(diǎn)聚類(lèi)一次性規(guī)劃長(zhǎng)度縮短了10.39%,且滿(mǎn)足了機(jī)器人電量約束。 圖8為100個(gè)任務(wù)點(diǎn)測(cè)試結(jié)果,此時(shí)2聚類(lèi)不能滿(mǎn)足電量約束條件,繼續(xù)進(jìn)行3聚類(lèi),才能滿(mǎn)足約束,從而得到圖8(d)路徑規(guī)劃結(jié)果。如表3所示,100任務(wù)點(diǎn)路徑規(guī)劃總長(zhǎng)度由傳統(tǒng)GWO算法的20 342.147 2 m 縮短到IGWO算法的19 378.594 8 m,再在機(jī)器人電量約束的條件下,進(jìn)行任務(wù)點(diǎn)3聚類(lèi),其路徑長(zhǎng)度縮短為10 965.772 8 m,縮短比例為53.91%。由此可見(jiàn),在大任務(wù)量作業(yè)的場(chǎng)景中,本文算法路徑規(guī)劃優(yōu)勢(shì)更佳明顯。 表3 路徑規(guī)劃測(cè)試結(jié)果Table 3 Test results of path planning 針對(duì)大任務(wù)量監(jiān)測(cè)作業(yè),提出基于改進(jìn)灰狼優(yōu)化算法區(qū)域監(jiān)測(cè)機(jī)器人路徑規(guī)劃算法。該算法選取尋優(yōu)性能良好且穩(wěn)定的灰狼優(yōu)化算法,并對(duì)其進(jìn)一步改進(jìn),以Logistic混沌映射加強(qiáng)種群多樣性,以控制參數(shù)自適應(yīng)調(diào)整策略平衡灰狼優(yōu)化算法的搜索和開(kāi)發(fā)能力,以靜態(tài)加權(quán)平均權(quán)重策略,更新種群位置,加快收了斂速度,從而增強(qiáng)了算法的模型求解能力。根據(jù)任務(wù)量規(guī)模及機(jī)器人載電量約束,引入K-means算法任務(wù)聚類(lèi),并通過(guò)IGWO算法進(jìn)行路徑求解,將大規(guī)模任務(wù)量自動(dòng)自主的轉(zhuǎn)化成分時(shí)分步任務(wù)。實(shí)驗(yàn)結(jié)果表明,IGWO算法無(wú)論是在單峰函數(shù)還是多峰函數(shù)的測(cè)試上收斂效果均有提高,特別在多峰函數(shù)更佳明顯。基于改進(jìn)灰狼優(yōu)化算法的區(qū)域監(jiān)測(cè)機(jī)器人路徑規(guī)劃在大規(guī)模任務(wù)量的場(chǎng)景更能體現(xiàn)出優(yōu)越性,任務(wù)規(guī)模越大,路徑縮短比例更高。2 改進(jìn)的灰狼優(yōu)化算法(IGWO)
2.1 傳統(tǒng)灰狼優(yōu)化算法(GWO)

2.2 改進(jìn)的灰狼優(yōu)化算法(IGWO)
3 問(wèn)題建模求解
3.1 K-means算法
3.2 約束條件下IGWO算法模型求解

4 實(shí)驗(yàn)仿真及結(jié)果分析
4.1 IGWO算法測(cè)試仿真
4.2 基于IGWO算法的區(qū)域搜索機(jī)器人路徑規(guī)劃仿真

5 結(jié)論
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50公民與法治(2020年11期)2020-07-25 02:02:06領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16商周刊(2017年5期)2017-08-22 03:35:26中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16華東科技(2016年10期)2016-11-11 06:17:41
