基于改進AK-MCS 法的船舶板架極限強度可靠性分析
2020-06-29 08:43:48羅文俊王德禹
中國艦船研究 2020年3期
羅文俊,王德禹*
1 上海交通大學海洋工程國家重點實驗室,上海200240
2 高新船舶與深海開發裝備協同創新中心,上海200240
0 引 言
近年來由于船舶的極限承載能力不夠,在高海情下,許多船舶出現了局部失效破損甚至引發整體斷裂的海損事故。因此,船舶的極限承載能力是船舶設計中需要重點考慮的方面。目前,國內外學者對于船舶的確定性極限強度的研究頗多,卻鮮有考慮諸多不確定因素的船舶極限強度可靠性研究。
蒙特卡羅(MC)法是計算可靠度最準確的方法,且適用于極限狀態函數為高維度、多峰、強非線性的情況。結合代理模型采用MC 法計算結構的可靠度,只需知道功能函數值的正負號即可,因此要求代理模型盡可能準確擬合極限狀態邊界。邱志平等[1]利用人工神經網絡構建近似模型獲得近似設計點,結合MC 模擬(MCS)計算結構可靠度。Rashki等[2]提出以MC 樣本點的概率密度值作為權重因子,篩選出位于失效區域的樣本點。張亮等[3]采用神經網絡擬合極限狀態函數,從而根據函數映射關系生成大量極限狀態函數值,然后通過MC 概率分析得到結構的可靠度。陳松坤等[4]以樣本點到極限狀態邊界的距離和權重因子同時作為篩選準則,篩選出極限狀態邊界附近的點訓練BP 模型。Xiao 等[5]開發了3 種學習函數,確保了大多數新選擇的訓練樣本點遠離現有樣本點,并且使其盡可能接近極限狀態函數,在不考慮初始樣本不確定性的情況下產生確定的結果。侯國祥等[6]采用神經網絡擬合應力函數,結合MCS 計算內燃機的可靠度指標。Lü等[7]提出結合Kriging模型和線性采樣的主動學習可靠性分析方法(AK-LS)法,通過構建的主動學習函數H 篩選出對提高Kriging 模型精度最好的樣本點,以較少的樣本點構造高精度Kriging 模型。Echard 等[8]提出了結合Kriging 模型和MCS 的主動學習可靠性分析方法(AK-MCS),引入了一種學習函數U,通過將失效面附近的點和預測誤差較大的點篩選出來,以較少的樣本點實現了對極限狀態邊界的高度擬合。Zheng 等[9]提出 基 于改進AK-MCS 中U 函數的可靠性分析方法,通過采用U 函數篩選出初步最佳樣本點,然后再篩選出與初步最佳樣本點預測值異號且距離其最近的樣本點,通過這兩點連線,生成n 個等分點,再通過U 函數篩選出這n+2 點中U 函數值最低的點,作為最佳樣本點加入訓練集更新Kriging 模型。
AK-LS 方法的優點在于采樣點分布在整個設計空間,全局預測精度好;不足之處是Kriging 模型的后期更新效率較低,收斂速度較慢。AK-MCS方法的優點在于采樣點主要集中在極限狀態邊界附近,極限狀態邊界的擬合精度高,且后期收斂較快;不足之處在于Kriging 模型前期全局擬合精度較低,導致更新效率較低,收斂速度較慢[11]。
本文將充分利用以上兩種基于主動學習的可靠性分析方法的優勢,采用新的序列采樣篩選準則UH,并使用K 折交叉驗證(K-fold cross validation)法作為序列采樣停止準則,提出改進的AK-MCS 方法,對船舶板架的極限強度可靠性進行研究。使用該方法評估船舶實際航行中局部結構失效破損概率,尤其針對船舶局部較危險結構進行可靠性研究。本文對于船舶板架極限強度可靠性的研究具有重大意義。
1 改進AK-MCS 方法
1.1 學習函數U
在AK-MCS 方法中,Echard 等[8]引入了一種學習函數U:

式中:G?(X)和σG?(X)分別為Kriging 代理模型預測值的均值和方差。通過計算所有樣本點的U 值,將U 值最小點作為下一個最佳樣本點加入到實驗設計(DOE),同時將G?(X)值接近于0 的點(即失效面附件的點)和σG?(X)值較大的點(即預測誤差較大的點)篩選出來,以更新Kriging 模型。這種方法的優點在于不需要優化算法來識別添加到DOE 的下一個樣本點,便于使用Matlab 建模軟件中的DACE 工具箱。
1.2 學習函數H
Shannon[10]在1948 年 提 出 了“信 息 熵”的 概念,信息熵是對信息的量化度量。熵隨著變量不確定性的增大而增大,分析變量所需的信息量也隨之增大。Lü等[7]提出了結合Kriging 模型和線路抽樣法(LS)的主動學習可靠性分析(AK-LS)方法,其中引入了基于信息熵的學習函數H:
式中:f(G?(X)) 為G?(X) 的正態分布概率密度函數;H(G?(X)) 為G?(X) 的 混 亂 度,可 以 用 來 判 斷G?(X)的不確定性。若某點的信息熵越大,預測越不準確,該樣本點對提高代理模型精度的作用越大。
1.3 樣本點篩選準則UH
AK-MCS 方法中,樣本點篩選準則采用學習函數U,通過計算所有MC 樣本點的U 值,選擇U值最小點作為最佳樣本點,加入DOE中更新Kriging模型。這種篩選準則的缺點是Kriging 模型前期更新效率較低,收斂速度較慢;優點在于采樣點集中在失效面附近,可有效提高Kriging 模型對失效面的擬合精度,且后期收斂較快。AK-LS 方法中樣本點篩選準則采用學習函數H,通過計算所有MC 樣本點的H 值,選擇H 值最大點作為最佳樣本點,加入DOE 中更新Kriging 模型。這種篩選準則的缺點是Kriging 模型的后期更新效率較低,收斂速度較慢;優點在于采樣點分布在整個設計空間,對于前期提高Kriging 模型的全局預測精度貢獻較大。
本文采用的篩選準則結合了這兩種學習函數的優勢。先使用U 函數篩選出少量分布在失效面附近的候選樣本點,然后采用H 函數從候選樣本點中篩選出對提高Kriging 模型精度貢獻最大的點。即結合兩種學習函數,在每一輪迭代中篩選出對提高Kriging 模型擬合極限狀態邊界精度貢獻最大的樣本點。這種新的篩選準則既能有效保證Kriging 模型的精度,又能提高效率,減少了調用功能函數的次數。
1.4 迭代停止準則
本文迭代停止準則采用K 折交叉驗證[5]。將原始DOE 數據均分成K 組,每個子集分別做一次驗證集,剩下的K-1 組子集作為訓練集,生成K 個代理模型。根據每個代理模型計算失效概率,迭代停止準則為
1.5 收斂準則
在MC 方法中,MC 樣本容量應足夠大才能確保失效概率的準確性。尤其是對于失效概率非常低的情況,需要大量MC 樣本點。可根據變異系數評估樣本點數量nMC對失效概率計算結果的影響[12]。
每次迭代停止時,需要對輸出的變異系數進行校核,以確保樣本容量足夠大。本文取變異系數C.O.VPf≤0.05。
1.6 改進AK-MCS 方法的計算流程
改進AK-MCS 方法(AK-MCS(UH))的建立具體步驟為:
1)在設計空間中采用MC 采樣生成樣本集S,所有樣本點均不調用有限元模型(FEM)。
2)生成訓練集。采用拉丁超立方(LHS)采樣生成少量樣本點,生成的樣本點調用FEM 計算得出響應集,建立初始DOE。
3)根據初始DOE,使用DACE 工具箱建立Kriging 模型。
4)用Kriging 模型預測S 集中樣本點的響應值,采用MC 法計算失效概率P?f。
5)采用樣本篩選準則UH篩選出最佳樣本點X。
6)開始停止迭代準則判斷。若滿足停止條件,則進入下一步,否則將樣本點X 加入DOE 中,返回步驟3)。重復上述步驟,直到滿足停止準則。
7)進行收斂準則判斷。檢查失效概率的變異系數C.O.VPf,保證該次試驗有足夠多的樣本點。若計算結果低于設定值,則輸出失效概率,流程結束;否則生成新的MC 樣本點,加入到S 集,返回步驟4),重復上述步驟,直至滿足收斂準則。
以上步驟的流程圖如圖1 所示。
在實際工程應用中,訓練集中樣本點的響應值往往需要通過耗時的有限元計算得到,訓練集過大意味著計算成本巨大。而本文方法致力于以最少的樣本點建立具有足夠精度的Kriging 模型,從而盡可能減少調用有限元模型的次數,縮減計算成本。
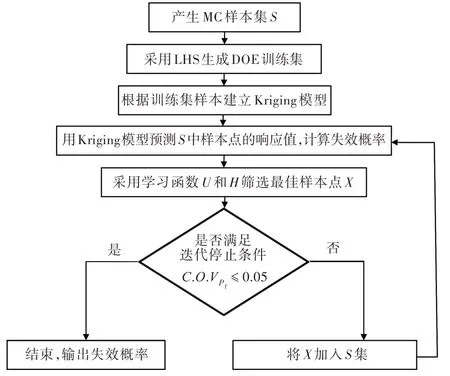
圖1 改進AK-MCS 方法流程圖Fig.1 Flow chart of improved AK-MCS method
1.7 算例展示
為驗證本文提出的改進AK-MCS 方法的有效性和適用性,引用了文獻[8]的一個非線性振蕩器數學算例,其物理模型如圖2(a)所示。采用不同可靠性方法計算對比。該振蕩系統的動態響應,如圖2 所示。
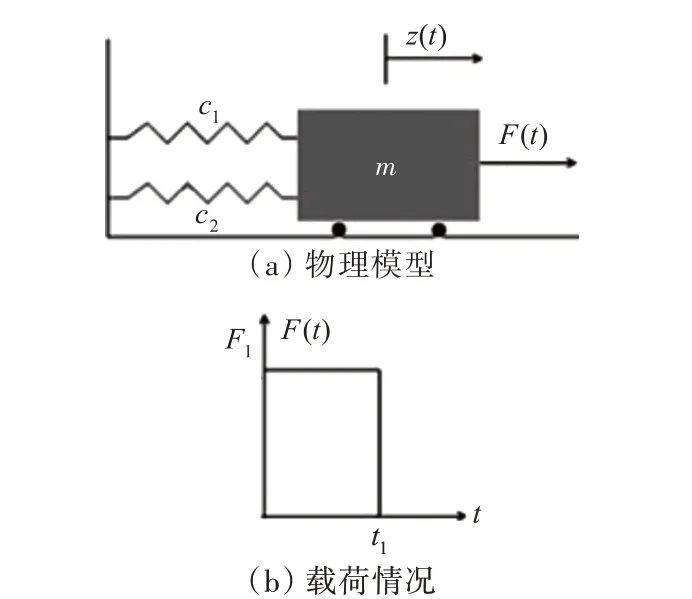
圖2 非線性振蕩器Fig.2 Nonlinear oscillator
該模型的功能函數為[8]

獻[8]。6 個變量均為各自獨立的隨機變量,其分布范圍如表1 所示。
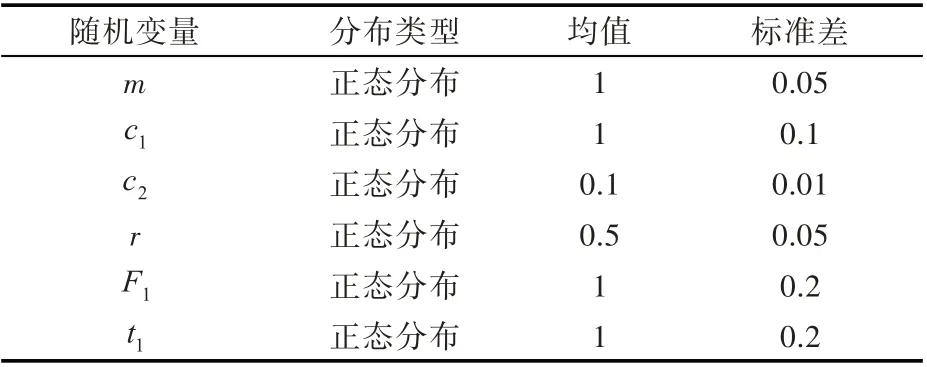
表1 非線性振蕩器設計變量特性Table 1 Nonlinear oscillator design variable characteristics
基于MC 抽樣的7×104個樣本點,分別運用MC 法、AK-MCS(U)法、AK-MCS(H)法 以 及AK-MCS(UH)法等對樣本點進行求解,所得結果如表2 所示。
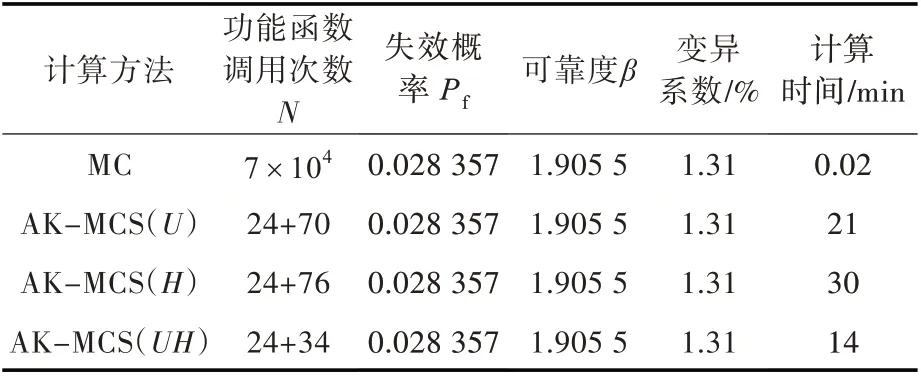
表2 非線性可靠性計算結果Table 2 Nonlinear reliability calculation results
表2 中,功能函數調用次數“24+70”為24 個初始樣本點加上70 個篩選樣本點。對比結果可以看出:AK-MCS(UH)方法計算的失效概率與MC法的結果一致,說明AK-MCS(UH)方法具有良好的計算精度;AK-MCS(UH)法僅調用了58 次功能函數,比AK-MCS(U)少調用了36次,比AK-MCS(H)少調用了42 次,顯著減少了功能函數的調用次數;AK-MCS(UH)的 計 算 時 間 為14 min,比AK-MCS(U),AK-MCS(H)的計算時間各減少了7和16 min,說明AK-MCS(UH)法提高了求解效率。
2 基于改進AK-MCS 法的船舶板架極限強度可靠性分析
由縱骨和橫梁組成的板架結構是船舶結構的主要組成部分,因此有必要校核船舶板架的極限強度。在求解船舶板架的極限強度時,材料特性、板厚及載荷等都具有一定的隨機性,會對船體板架極限承載能力的計算結果產生影響,因此需要對船舶板架結構極限強度可靠性進行研究。本文將基于改進的AK-MCS 方法對文獻中[13]一艘蘇伊士型油船的船底板架進行極限強度的可靠性研究,截取船舶中加筋板計算其在組合載荷下的失效概率。幾何模型如圖3 所示。
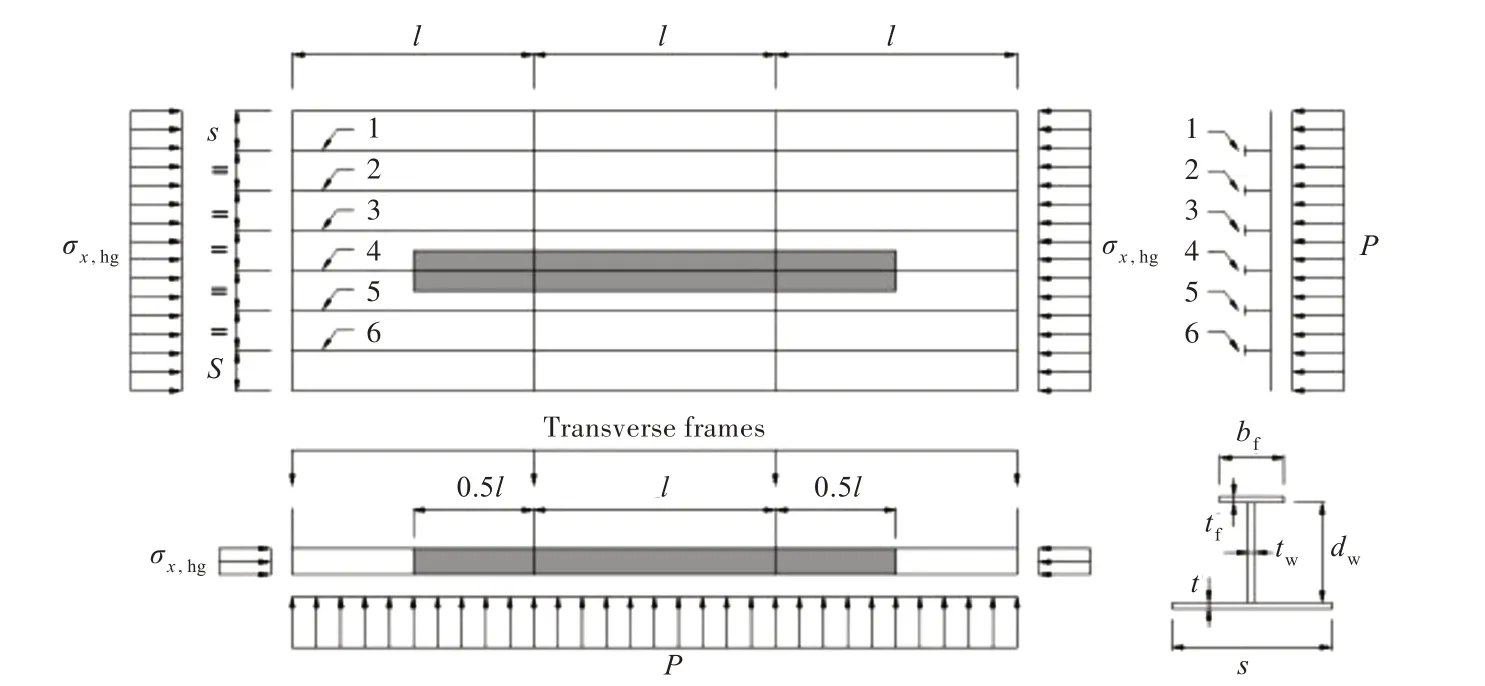
圖3 加筋板幾何示意圖Fig.3 Geometric diagram of stiffened plates
加筋板承受中拱彎矩σx,hg作用,底板承受橫向水壓力P。加筋板模型的功能函數為
G=σU-σx,hg(6)
式中:G<0 為結構失效;σU為加筋板的極限承載能力,即在橫向壓力、縱向彎矩組合載荷下的極限強度,調用有限元模型計算;σx,hg為加筋板在中拱狀態下的實際承載壓力,可根據Shu 等[13]提出的經驗公式進行計算。

以上各式中參數含義如表3 所示。
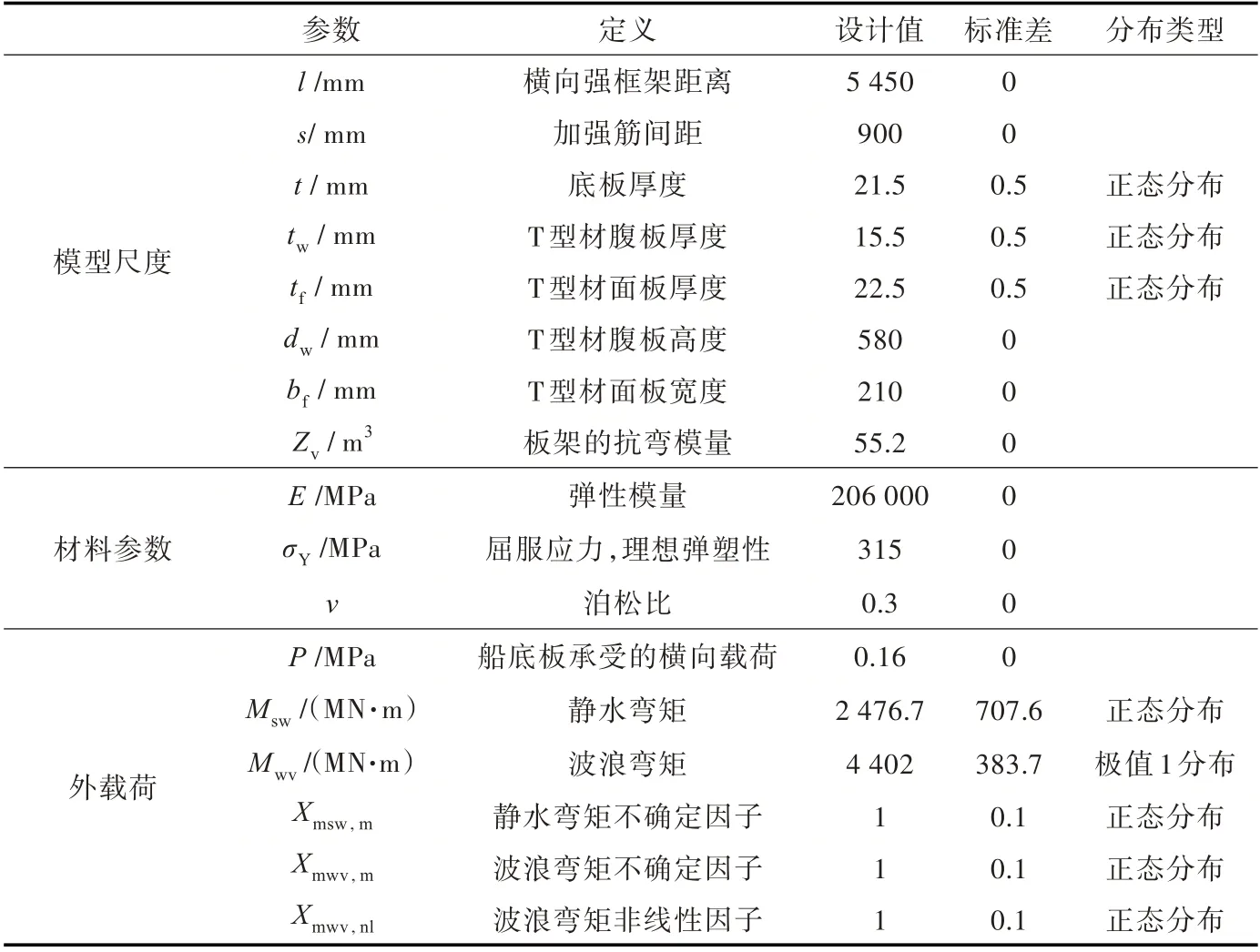
表3 加筋板模型參數Table 3 Stiffened plate model parameters
該計算模型選用了縱向雙跨距的1/2+1+1/2單根加筋板模型,如圖4 所示。本模型同時考慮了幾何尺寸與外載荷的不確定性,加筋板模型參數如表3 所示。
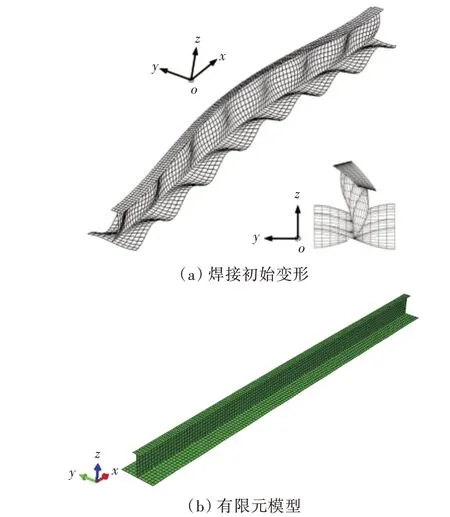
圖4 加筋板有限元模型以及焊接初始變形(比例因子為50)Fig.4 Finite element model of stiffened plates and initial deformation of welding(scale factor is 50)
圖5 為尺寸取設計值時加筋板在極限狀態下的有限元計算結果。
從圖5(b),圖5(c),圖5(d)可知,板架的失效模式分別由梁柱屈曲失效、桁材腹板失效和加筋側傾失效3 種失效模式耦合組成。
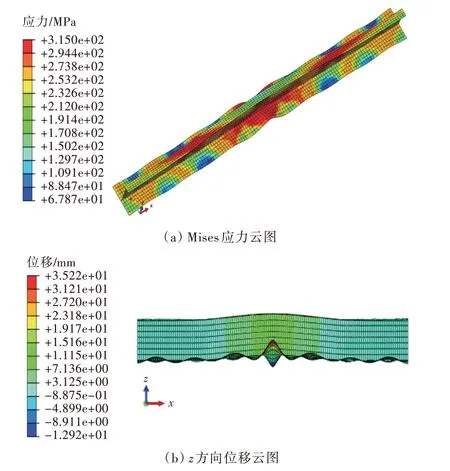
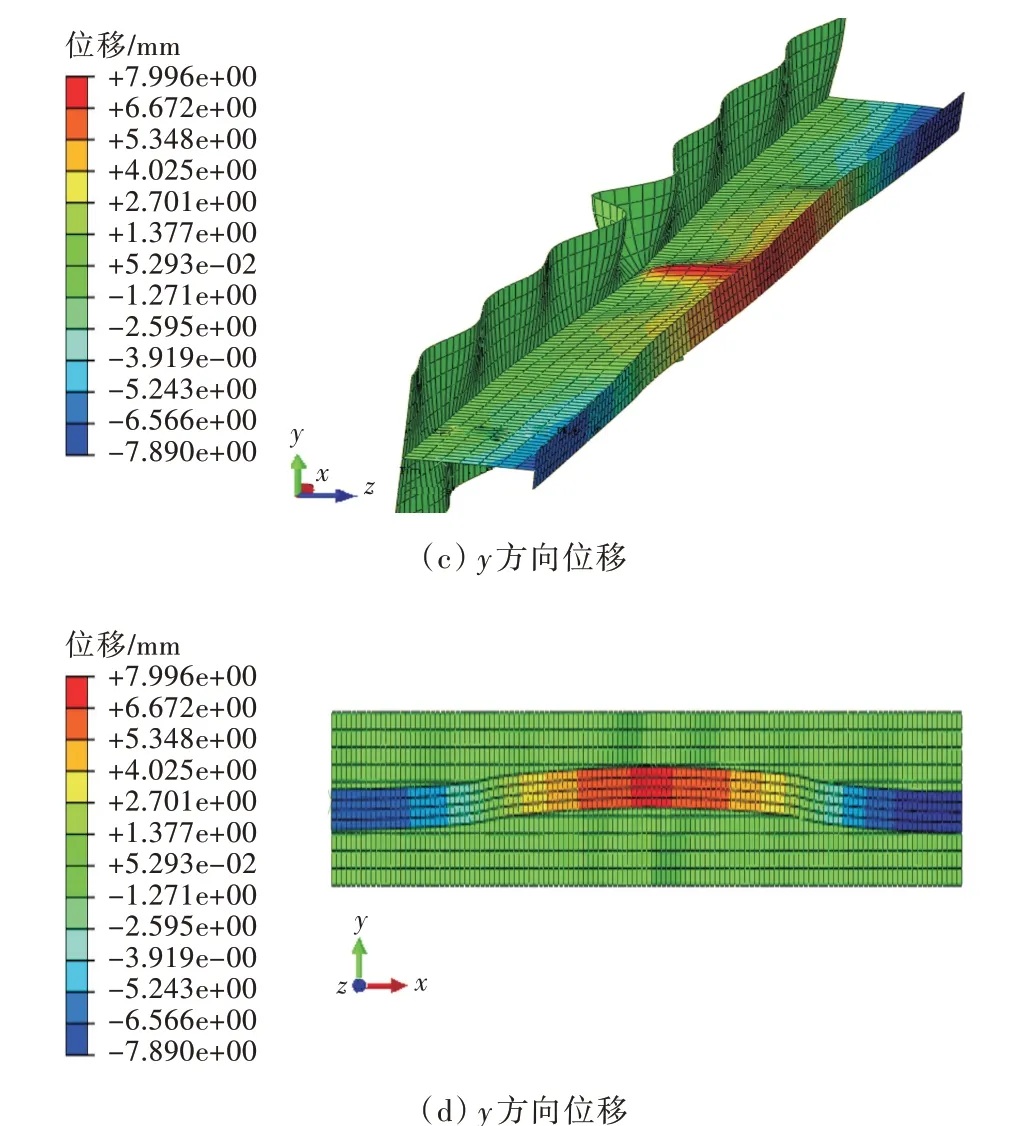
圖5 加筋板極限狀態下有限元模型計算云圖(變形放大倍數為8)Fig.5 The finite element calculation cloud chart of stiffened plate under limit state(deformation magnification is 8)
本算例對比了文獻[4]的改進蒙特卡羅法(BP-MC)[4]和文獻[13]采用MCS 以及結合二階響應面的MC 模擬(RS-MC)計算的加筋板的失效概率。同時,采用AK-MCS(U)法,AK-MCS(H)法以及AK-MCS(UH)法對其進行求解,計算結果如表4 所示。
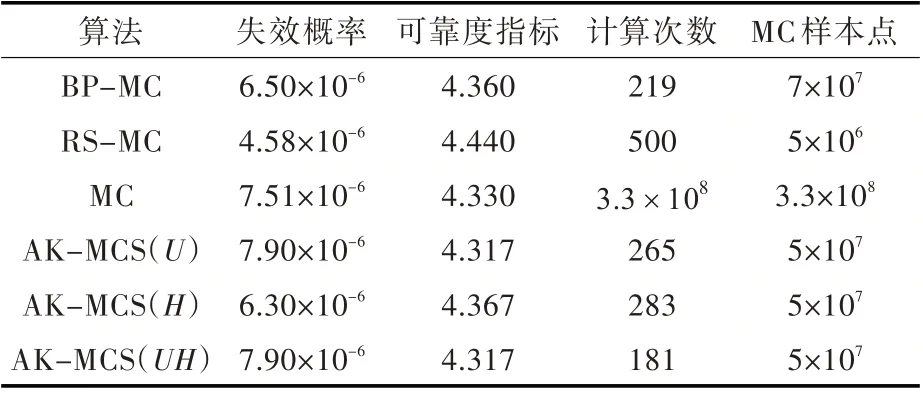
表4 加筋板可靠度計算結果Table 4 Stiffened plate reliability calculation result
由表4可知,改進AK-MCS方法(AK-MCS(UH))計算得到的失效概率最接近MC 方法的計算值,具有較高的計算精度。且僅需調用有限元模型181 次,比AK-MCS(U)法、AK-MCS(H)法 和BP-MC 法各少調用84,102 和38 次,是6 種方法中調用有限元模型次數最少的可靠性方法,有效降低了計算成本,對于船舶板架結構極限強度計算具有較好的適用性。
3 結 論
在工程實際應用中,通常保留了非常大的安全裕度,因此失效概率非常小。在此情況下,難以進行可靠性評估,尤其是當單次有限元模型仿真耗時較長時,計算成本將非常龐大。船舶結構極限強度可靠性分析具備以上特點,為此本文提出了改進AK-MCS 法,并將其應用于組合載荷作用下的船底板架極限強度可靠性分析,得到如下主要結論:
1)改進AK-MCS 法具有較高的求解精度和效率。以非線性振蕩器數學模型為例,驗證了該方法的可行性。可見,改進AK-MCS 法的計算結果與MC 法結果一致,且顯著減少了調用功能函數的次數和計算時間,在保證求解精度的同時提高了計算效率。
2)改進AK-MCS 法在船舶板架極限強度可靠性研究中具有良好的適用性和高效性,與MC法計算結果相比,計算誤差只有5%,與文中其他方法相比最接近于MC 法的計算結果,且調用有限元模型次數比原方法減少了32%,有效降低了計算成本。
本文所提改進AK-MCS 方法具有較好的繼承性,適用于其他行業的高可靠度工程結構問題,也可以與智能優化算法結合進行可靠性優化設計。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18
船海工程(2013年6期)2013-03-11 18:57:27
