無人船在清淤工程中的應用研究
2020-06-18 03:43:54
水利建設與管理 2020年5期
(廣州市水電建設工程有限公司,廣東 廣州 510600)
1 工程概況
磁湖位于黃石市中心,磁湖徑流面積62.8km2,湖泊面積8.2km2,平均水深1.75m,湖體容量1748萬m3,是兼有防洪、排澇、養殖和游覽等功能的水資源地。
亞行貸款黃石水污染綜合治理項目生態修復子項目磁湖清淤第一期工程位于黃石市市中心。其中清淤工程范圍為南磁湖湖首生態港渠和南磁湖南岸清淤,總清淤量為382319m3。
2 選擇課題
磁湖是黃石市市區的一座城中湖,1997年被湖北省政府批準為省級風景區。磁湖底泥的淤積狀況直接決定水生態修復的成敗,因此磁湖清淤項目成為了水生態環境修復的重要環節。
通過對以往清淤項目進行調查(見圖1),傳統清淤驗收方式,一般采用人工插標尺桿的方式進行驗收檢查。由于該方式人為因素干預大,導致以往清淤工程的誤差大,因此超欠挖值往往都在0.4~1m之間,甚至更高。

圖1 傳統清淤超欠挖誤差值統計
從圖1可知,傳統清淤誤差大,導致清淤效果達不到治理和恢復水生態的效果。為了改變以往的測量弊端,減少傳統清淤工程施工誤差,公司特組建無人船QC小組,對磁湖的河床清淤進行準確測量。無人船在清淤工程中的應用課題產生原因流程見圖2。
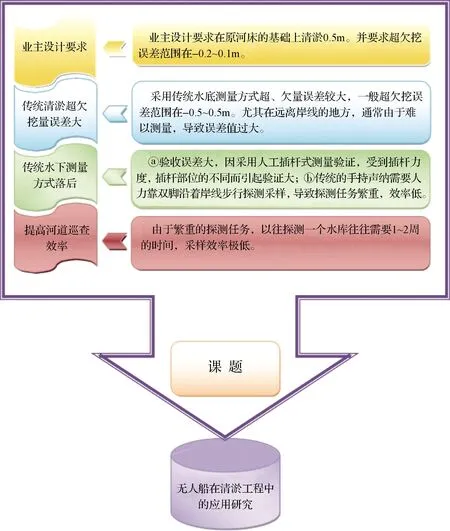
圖2 課題選擇
3 設定目標
QC小組在前期的調查中,發現傳統清淤施工中,超欠挖量為-0.5~0.5m,而公司要求項目部在本工程中,減少傳統測量誤差,提高效率、降低復查成本。因此抽調“企業創新中心”的技術骨干,研究無人船水下測量技術。希望通過新技術的引進能將超欠挖誤差控制在-0.18~0.08m。
4 方案比選
清淤測量探測項目主要由測量探測方式和測量探測載體兩部分組成。QC小組通過同類項目的調查及網上查新,分別對測量探測設備和測量探測載體的選擇進行了分析比較。
4.1 測量探測設備比選
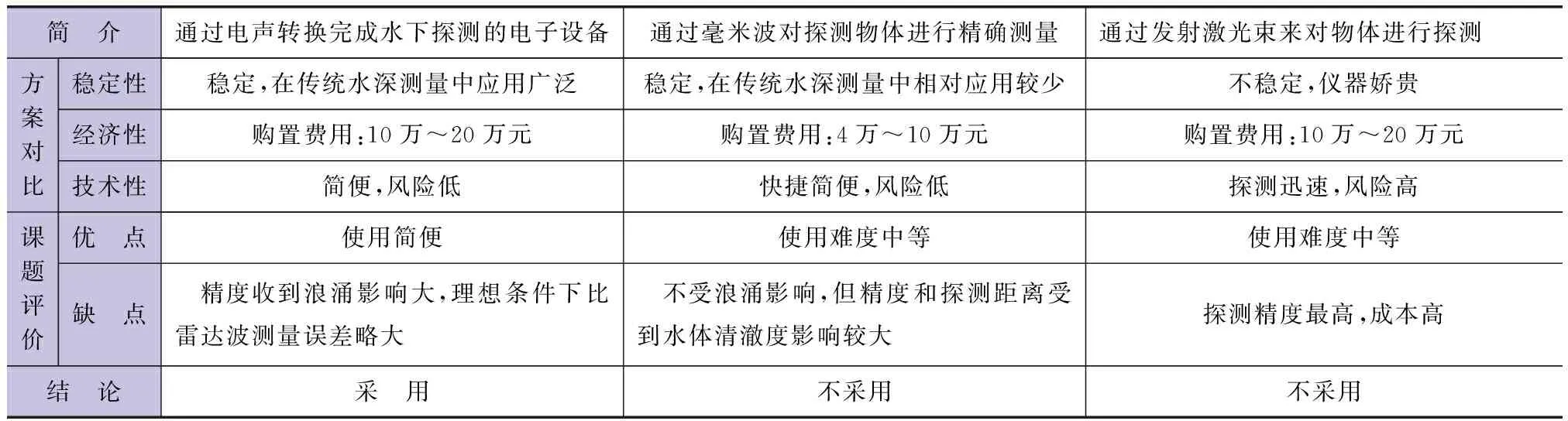
測量探測設備比選見表1。
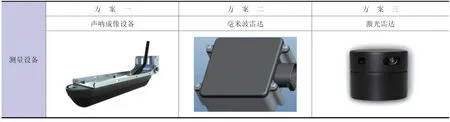
表1 測量探測設備比選
續表
小結:通過以上分析,測量探測設備優選方案為聲吶成像設備。
4.2 測量探測載體比選
測量探測載體比選見表2。

表2 測量探測載體比選
小結:通過以上分析,測量探測載體優選方案為無人船。因此,最終清淤測量探測項目采用“無人船搭載聲吶成像儀”方案。
5 制定對策
“無人船搭載聲吶成像儀”方案由船體安裝和調試、聲吶成像儀連接和調試兩部分任務組成,因此,QC小組針對這兩項任務制定了對策表,見表3。

表3 任務對策實施計劃
6 對策實施
6.1 無人船控制系統
無人船控制系統如圖3所示,聲吶情況如圖4所示。
6.2 對策實施
6.2.1 船體安裝和調試
對策:優選載體及完成制作安裝。
措施如下。
6.2.1.1 船型的優選
船型的選擇主要從船身、船體材料、尺寸三方面進行考慮(見圖5)。通過對任務情況和廠商提供的船型尺寸進行分析(見表4),最終確定了采用GFRP材質的雙體船作為本次任務的載荷設備。
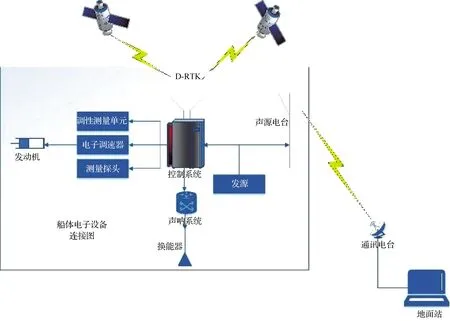
圖3 無人船控制系統
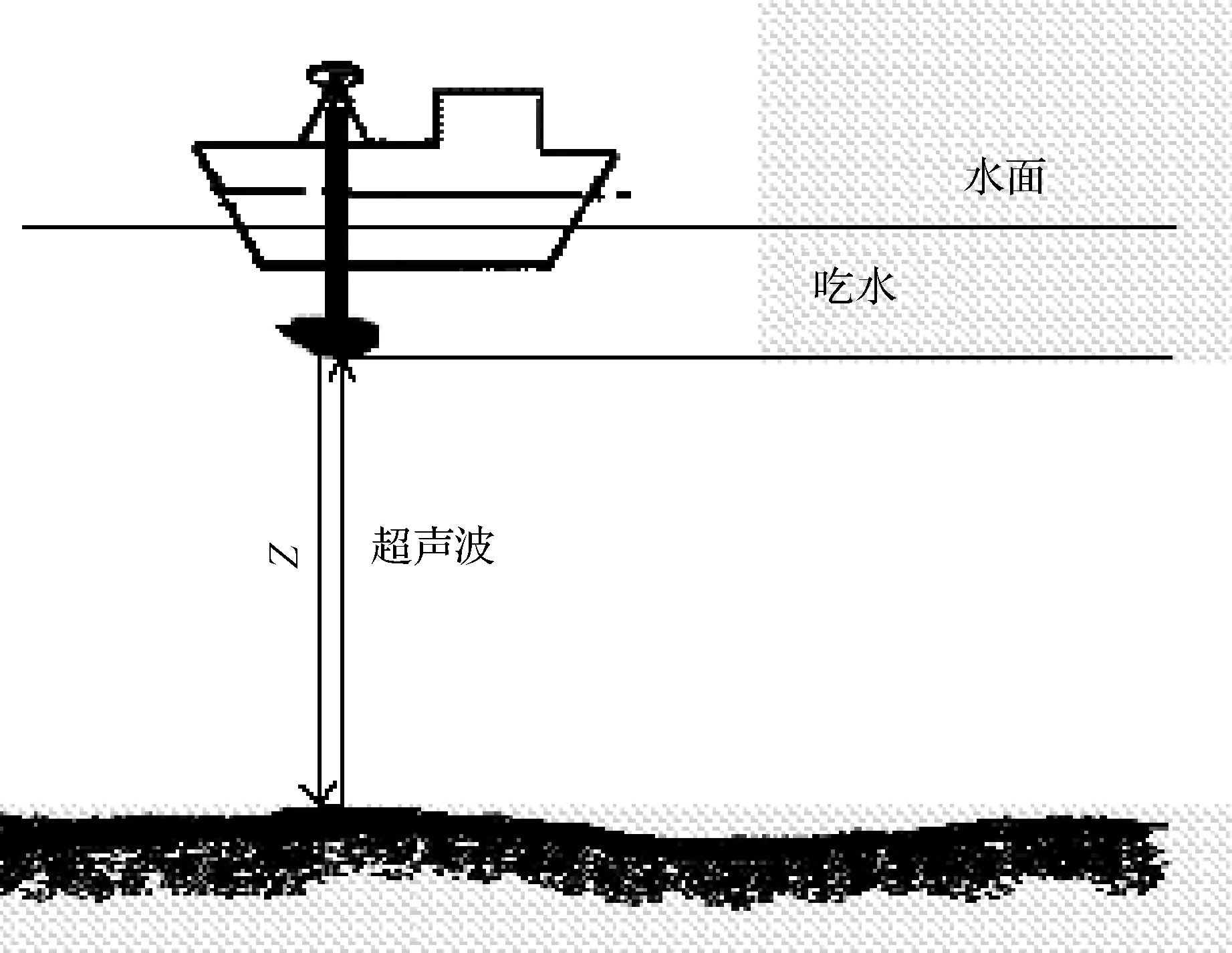
圖4 聲吶示意圖

圖5 船體類型示意圖
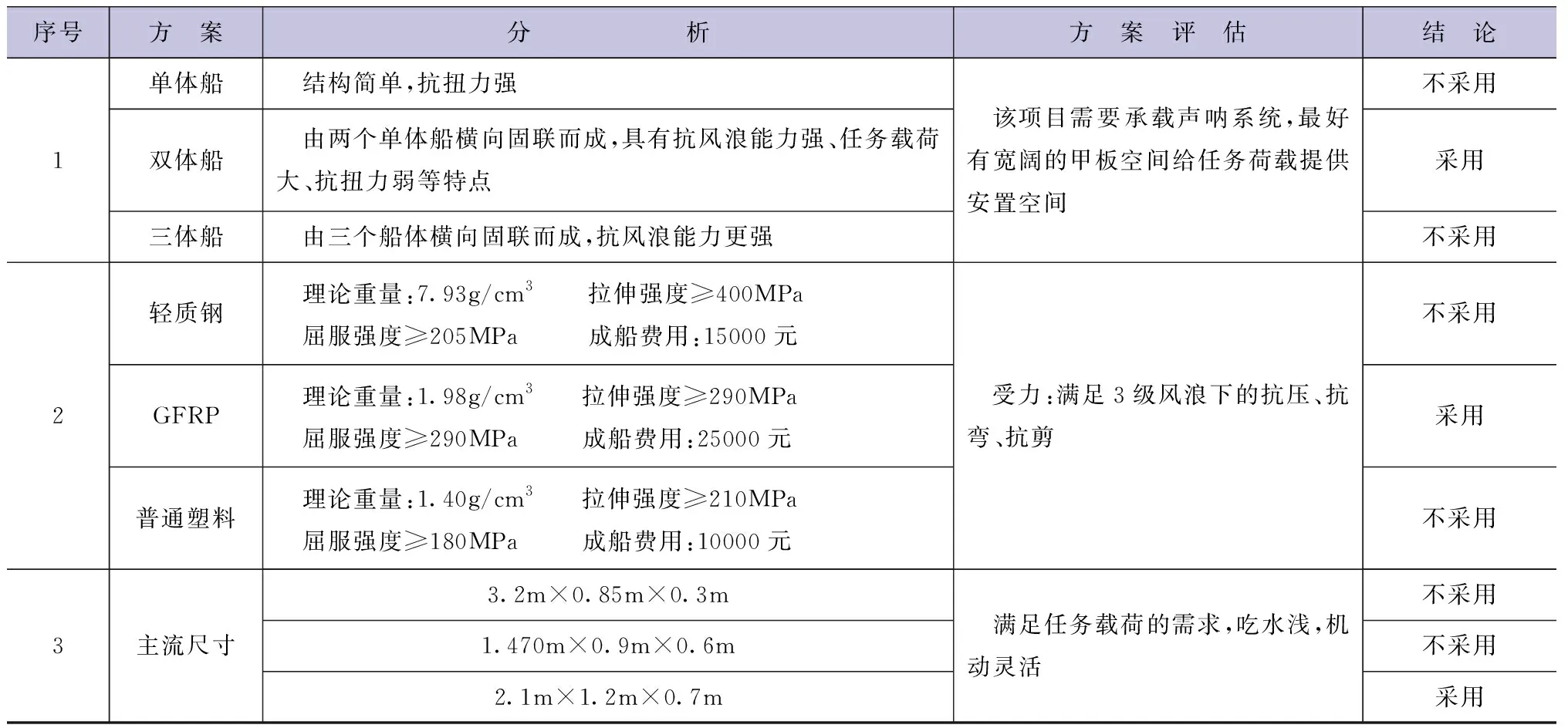
表4 船體分析及評估
總結:從理論參數、力學性能、經濟性等方面對載體進行選擇,最終選用尺寸為2.1m×1.2m×0.7m、GFRP材料的雙體船為本次任務的載荷船體。
6.2.1.2 動力系統的優選
動力系統選擇分為發動機選擇和螺旋槳選擇兩個部分,小組成員對發動機和螺旋槳進行比選分析,最后確定電機和定距漿為本項目的動力選擇。
動力系統如圖6所示,動力系統分析及評估如表5所列。

圖6 動力系統示意圖
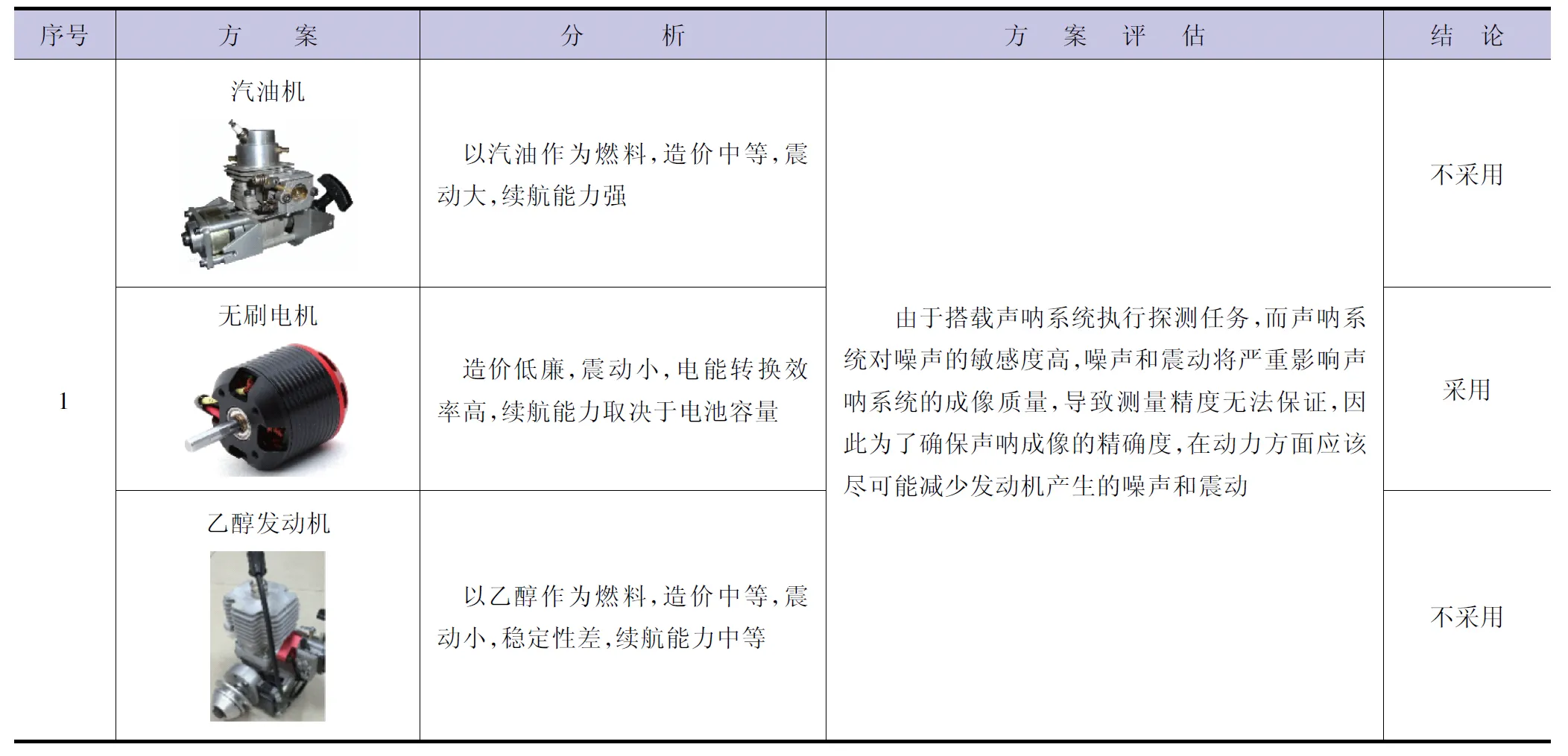
表5 動力系統分析及評估

續表
6.2.1.3 定位系統的優選
定位系統的優選見圖7,定力系統精度及分析見表6。
小組成員通過定位原理與定位精度比較,結合項目要求,最終選定采用偽差分定位作為本項目的定位系統。
6.2.1.4 安裝和調試
a.將D-RTK接收機天線與測深儀換能器盡量安裝在同一測深桿上,測深桿位于船身重心上,以確保穩定。換能器吃水深和D-RTK天線高為固定值,便于量取水位線深和天線高,并可減小由負載、航速、航向變化以及水深測量誤差。

圖7 定位系統示意圖

表6 定位系統精度及分析
b.對控制系統進行參數調整,校準電子磁羅盤。通過對磁羅盤的校準,船體能識別到自身相對地面的姿態。由于風浪影響而發生偏航情況時,船體能及時調整到正確的航線上。
c.小組成員攜帶設備在湖邊進行航線規劃測試,并觀察船體偏航距離是否小于5m(見表7)。

表7 航跡過程
從航跡數據可知,無人船在執行任務過程中偏航距離一般小于5m,僅在航線轉彎處受風浪影響會出現偏航過大的跡象。航跡吻合度達到93.3%,滿足使用要求。
結論:小組通過測試驗證,船體能按照預先規劃的航線自主航行,航跡與預期航線吻合程度高達93.3%。達到預期效果。
6.2.2 聲吶成像儀連接和調試
對策:實現聲吶成像。
措施如下。
6.2.2.1 聲吶選擇
聲吶系統優選分析見表8。
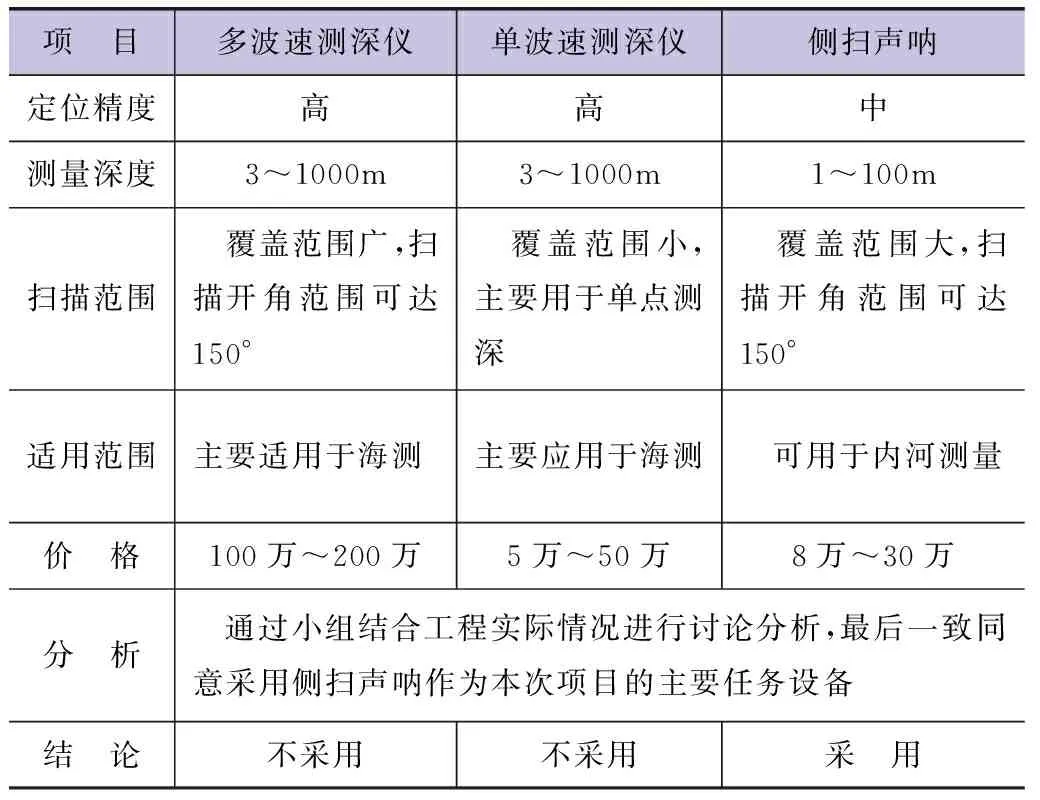
表8 聲吶系統優選分析
通過方案比較,優選采用側掃聲吶作為本次項目的主要任務設備。
6.2.2.2 聲吶安裝
將側掃聲吶換能器安裝在船身重心位置上,遠離螺旋槳、發動機等電子設備,以免相互干擾,確保安裝后不改變船身重心。將信號線接入船艙自動駕駛器中,與地面站平臺連接穩定后,將接線口打膠并進行防水處理。確保無誤后進入調試階段。
6.2.2.3 調試及檢查
小組成員通過4次試驗(見表9),并查閱資料,逐步將測量精度提高,最后將測深精度確保在小于1.0cm范圍以內。

表9 聲吶試驗過程記錄
結論:通過試驗驗證,達到目標預期效果。
7 效果檢查
通過方案比選和實施,小組成員正式前往磁湖驗證研究成果。
實施對策后,在清淤前后進行了探測和比對,將欠挖的部分進行返工處理,使清淤工作的計量更加有效。
通過無人船對清淤前后的高程對比,我們找出了6個不符合業主要求的清淤點,其中5個欠挖點、1個超挖點(見表10)。隨后再次安排施工隊伍對這6個不合格點進行返工,返工后數據見表11。
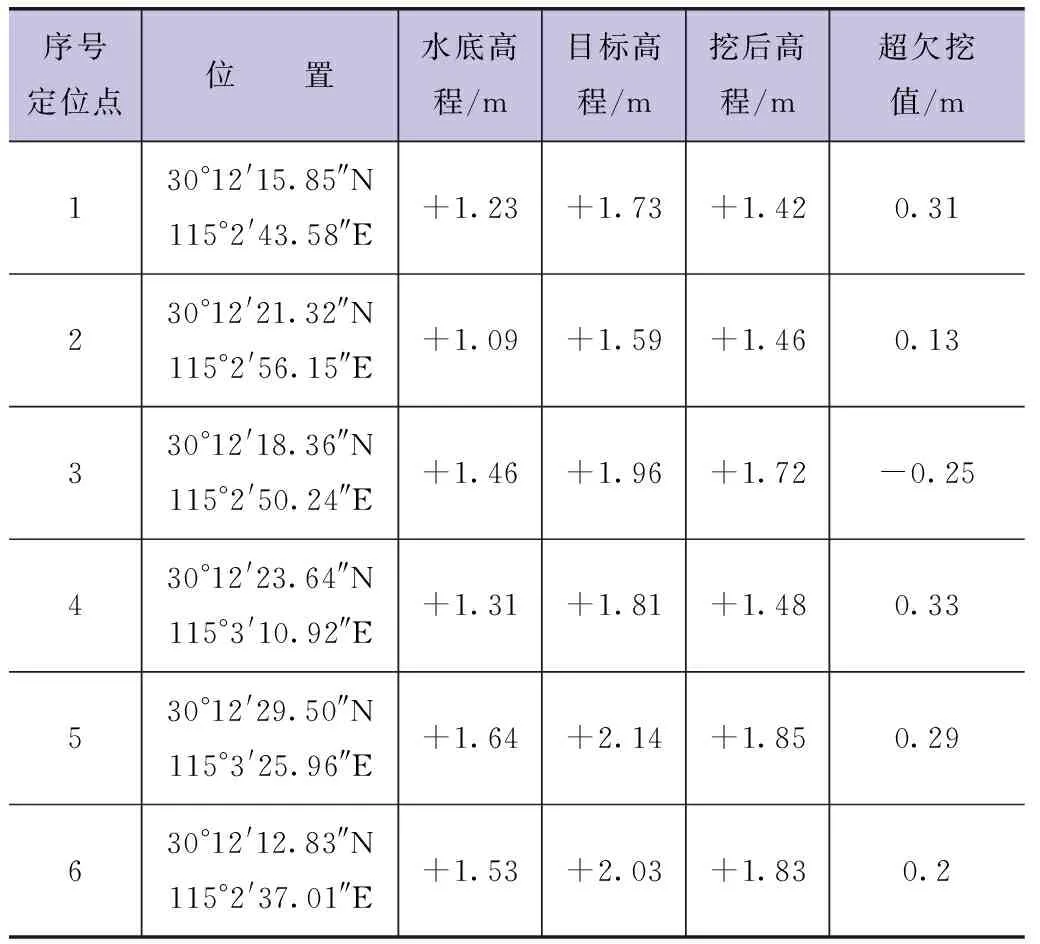
表10 第一次清淤數據超欠挖過大的位置
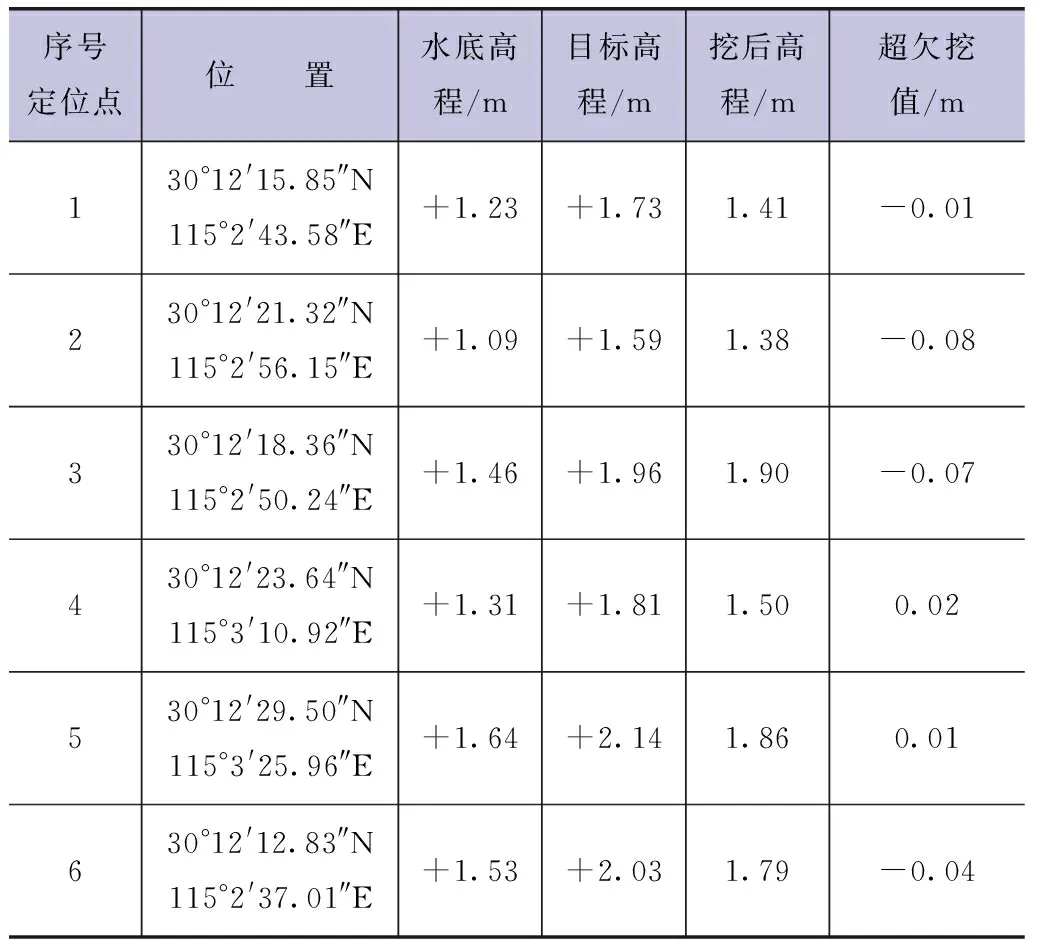
表11 第二次清淤返工后數據
由第二次清淤數據可知,目前清淤誤差值在-0.08~+0.02m之間,滿足小組設定的誤差要求。
此次QC小組活動,小組成員首次在公司范圍內將自動化無人船與傳統的水利工程項目相結合。采用無人船搭載聲吶成像系統的方式,對河床岸線進行全方位的探測,省去人工徒手插竹竿的復雜而繁重的工作,大大改善了以往河床清淤驗收的弊端,降低了傳統清淤驗收的誤差值,提高了河床清淤的準確度。清淤前后聲吶成像對比見圖8。
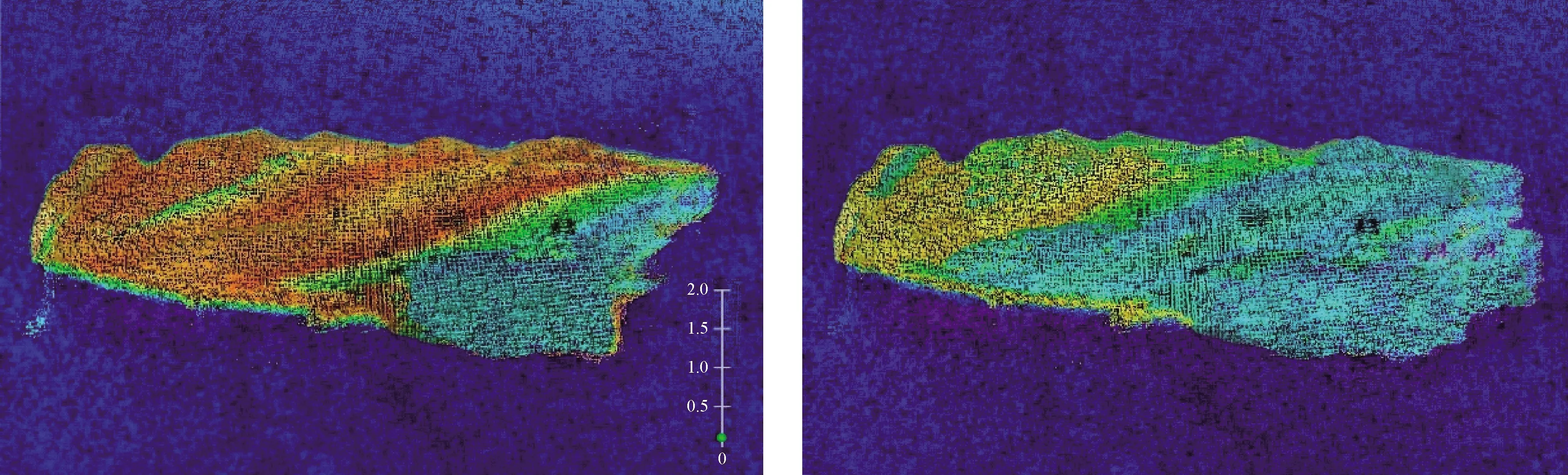
圖8 清淤前后聲吶成像圖
8 制定鞏固措施
8.1 標準化
小組將無人船在清淤工程的實施過程中行之有效的對策和相關措施納入到鞏固措施階段,編制了標準化措施(見表12),經公司工程技術部門審核、總工程師審批,已在公司相關工程上推廣應用。

表12 無人船在清淤工程中的相關標準
8.2 鞏固期應用
小組活動成果納入標準化成果后,小組連續3個月對成果進行多次應用,應用結果如表13所列。
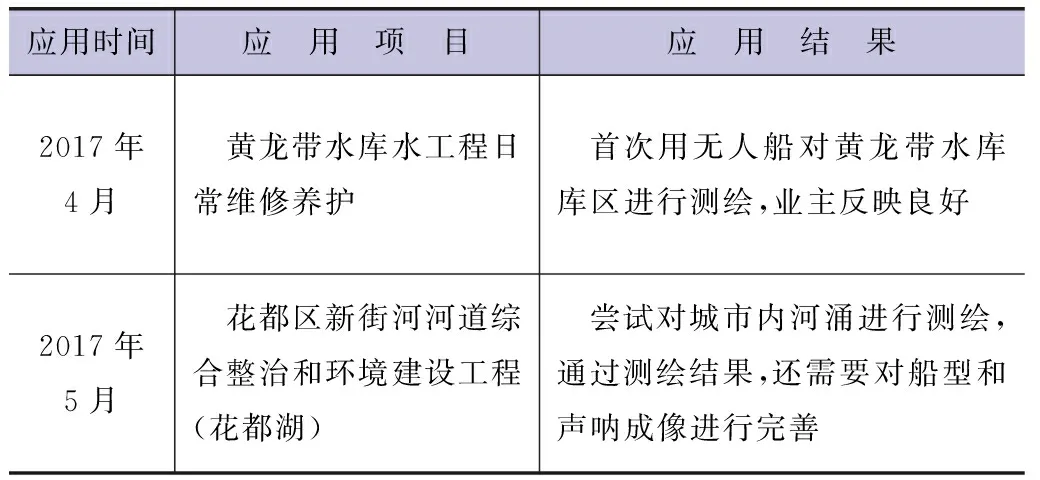
表13 鞏固期的應用
9 總結與下一步打算
9.1 QC活動總結
本次QC小組活動嚴格遵循PDCA程序,先后經過10次大的活動、20次小的活動,陸續不斷開展了四個階段即計劃(Plan)、實施(Do)、檢查(Check)和處理(Action)的工作,分析問題時做到了一環緊扣一環、具有邏輯性;并且在各個階段的決策時能做到QC小組成員深入施工現場調查取證,以客觀事實為依據,用數據說話;能恰當準確地應用統計圖表來歸納問題、發現問題和分析問題。
9.2 下一步打算
在以后的工作中,我們準備繼續以健全制度、提高質量、創造效益為核心開展QC活動,針對無人船在內河河床測量的問題開展新一輪的PDCA循環,全面提高無人船搭載聲吶的成像精度和項目組全體員工的綜合素質。在此次的QC小組活動過程中,我們發現無人船在水利工程的應用上仍然有提升的空間,因而,為了更好地開展無人船在水利行業上的應用,我們下一個QC小組活動的課題初步定為“無人船在監控內河水質上的應用”。
猜你喜歡
中學生數理化·七年級數學人教版(2021年11期)2021-12-06 05:38:46
江蘇安全生產(2020年3期)2020-04-21 05:44:14
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
云南教育·中學教師(2019年6期)2019-08-13 07:03:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
基層中醫藥(2018年11期)2019-01-31 05:26:52
電子制作(2018年12期)2018-08-01 00:47:44
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
制造技術與機床(2017年6期)2018-01-19 02:41:21
電子制作(2017年19期)2017-02-02 07:08:38