半球諧振陀螺在海洋導航定位中的應用
2020-06-15 03:21:00許江寧何泓洋
導航定位學報 2020年3期
關鍵詞:系統
李 鼎,許江寧,何泓洋
半球諧振陀螺在海洋導航定位中的應用
李 鼎,許江寧,何泓洋
(海軍工程大學 電氣工程學院,武漢 430033)
為進一步研究慣性導航系統,介紹1種具有高精度、高穩定性、長使用壽命的固態振動陀螺:給出半球諧振陀螺的結構和工作原理;闡述其國內外發展歷程、研究現狀和實際應用;最后分析半球諧振陀螺在海洋導航定位中的發展潛力和發展趨勢。
半球諧振陀螺;導航;慣性技術;海洋導航
0 引言
隨著我國經濟發展,海外貿易延伸越來越遠,需要加快建設海洋強國,以達到近海防御、遠海護衛的戰略要求。海軍裝備的發展十分重要,未來海軍對武器裝備將提出更高要求,對導航定位的核心即慣導系統也將提出更高的需求。未來的慣導系統將以高精度、高可靠性、高穩定性、長使用壽命、抗干擾能力強為目標。本文主要介紹和分析滿足未來海洋導航定位需求的半球諧振陀螺技術。
半球諧振陀螺(hemispherical resonator gyros, HRG)是1種發展前景良好的新型高性能陀螺。半球諧振是基于科里奧利加速度產生的科氏力[1],利用諧振子開口端駐波進動效應來檢測基座旋轉。半球諧振陀螺是1種結構簡單的新型固體振動陀螺,與經典陀螺相比,沒有高速旋轉的轉子與活動支撐,從根本上避免了機械摩擦,大幅度提高了精度,具有良好的抗沖擊振動性[2],慣性技術界認為,半球諧振陀螺是21世紀捷聯慣導系統中最理想的元件之一[3]。美國空間任務優先采用半球陀螺慣性導航系統,已經累計在空間零故障飛行300萬h,可靠性高達0.995[4]。其具有15 a以上的超長使用壽命,適合應用于衛星、空間飛行器、海洋艦船等的導航工作。
在美國、俄羅斯、歐洲等國家和地區,半球諧振陀螺已經在衛星、空間飛行器、海軍艦艇、陸軍裝備、礦井探測等領域得到了廣泛應用[5]。半球諧振陀螺已經成為法國新一代海洋導航定位系統的主要慣性導航設備。國內的研究雖然起步較晚,但在“十五”計劃后,就取得了突破性成果,已經有完整的研發生產線,能夠研發制造出滿足我國航天航空方面工程應用的產品。
1 基本結構與工作原理
1.1 基本結構
半球諧振陀螺結構主要由敏感器件、緩沖電路、控制電路等部分組成,其中敏感器件包括3個部件:半球諧振子、激勵罩和敏感基座[6],如圖1所示。
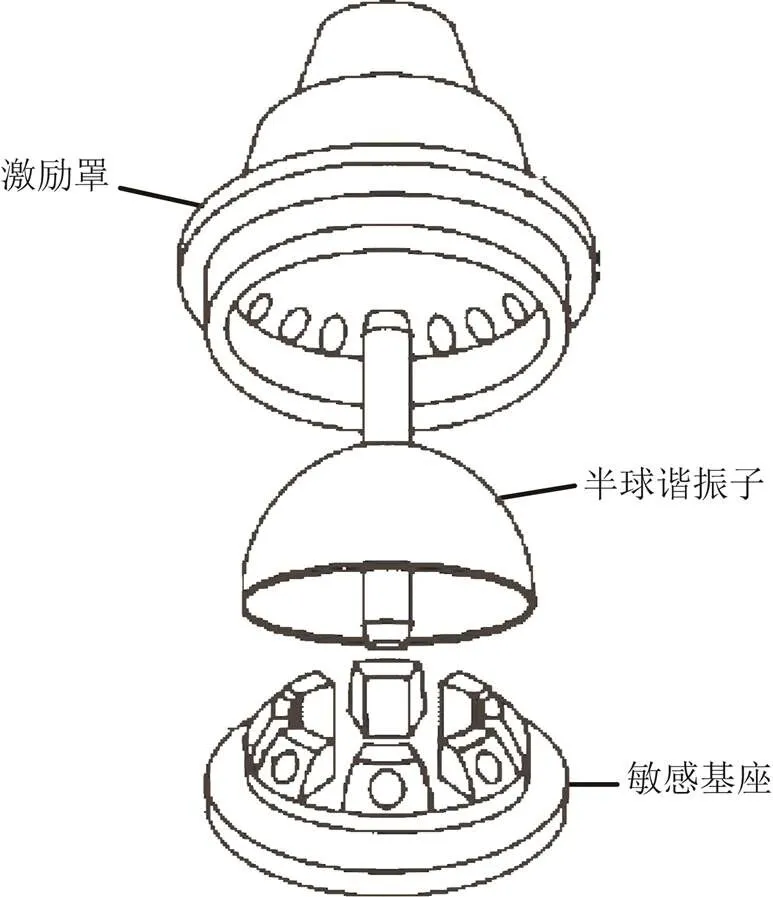
圖1 半球諧振陀螺結構
半球諧振子是1個由熔融石英材料制成的半球彈性體,是構成陀螺的主體部分。激勵罩主要由激勵電極組成,利用靜電力作用,諧振子產生振動并提供修正誤差。敏感基座上有多個讀出電極,用于讀出根據電容檢測出的諧振子振動情況,并獲得陀螺的旋轉角度信號[7]。
隨著加工技術的進步,目前基于經典3件套構型改進成2件套構型,2件套構型如圖2所示。2件套構型沒有3件套構型中的“激勵罩”,而是把“敏感基座”上的“敏感電極”與“激勵電極”結合在一起[8]。這種2件套構型體積和質量都比3件套構型小,結構簡單,且成本更低。其缺點是加工技術難度大、精度高、實現難度大。
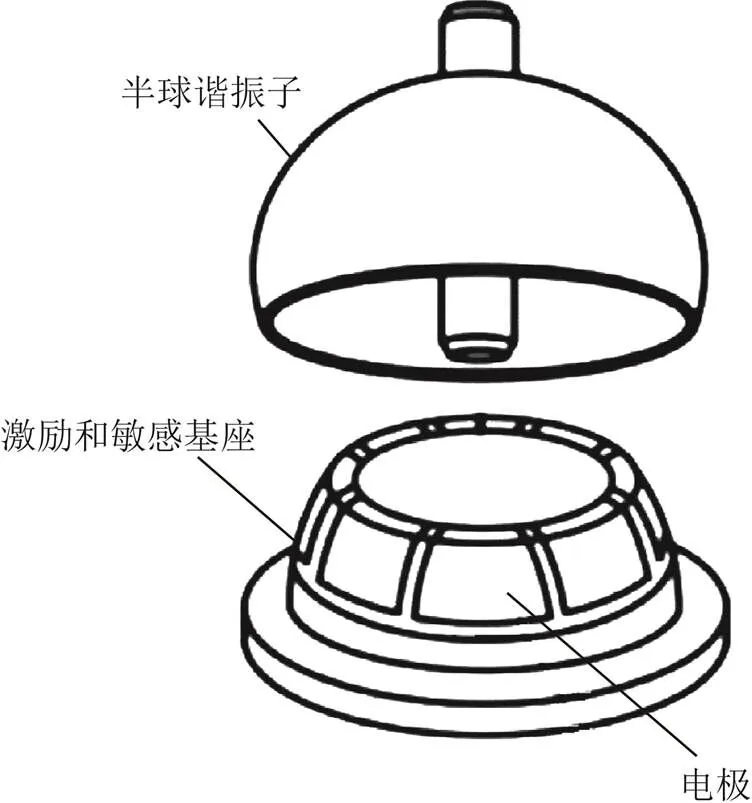
圖2 2件套半球諧振陀螺構型
1.2 工作原理
半球諧振陀螺是1種固體振動陀螺,它通過檢測諧振子徑向振動產生的駐波沿環向的進動,來確定旋轉角度與速度[9]。
半球諧振子在激勵罩的作用下,處于2階工作振型時,振型進動原理如圖3所示。
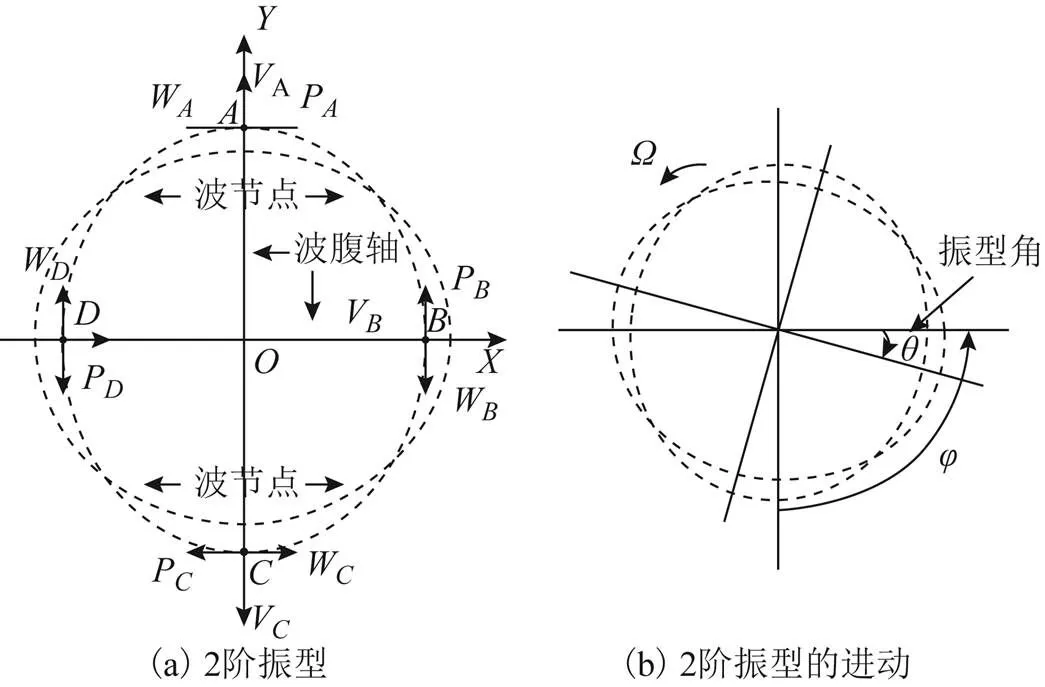
圖3 振型進動原理
陀螺在不加外界角速度輸入時,半球諧振子維持環向波數為2的4波腹振動,半球諧振子唇緣的振型在2個正交的橢圓與圓之間變化,振型具有4個波腹點和4個波節點,2個橢圓長軸的端點為駐波的波腹點,2個橢圓的交點稱為波節點[10]。
因此只要測量出半球諧振子的振型角變化,即可計算出陀螺轉過的角度[7]。
半球諧振陀螺有2種常用的工作模式——全角模式(whole-angle mode)和力平衡模式(force-to-rebalance mode)[11],及1種新型工作模式——自校準模式(self-calibration)。
通過控制激勵罩的激勵電場,使諧振子建立1個固定振幅的駐波。陀螺在何種模式下工作,取決于駐波是否相對于諧振子產生相對運動[12]。當在力平衡模式下工作時,激勵電場控制駐波波形,與諧振子保持相對靜止,通過檢測保持相對靜止所需的靜電力大小,即可以獲得科氏力的大小,根據科氏力與轉速間的比例關系,即可解算出載體的轉動速率[13]。雖然這種模式檢測精度高、噪聲特性低,但由于受制于力平衡回路的電極電壓飽和作用,其動態測量范圍較小[14]。當在全角模式工作時,駐波與諧振子產生相對運動。由于進動角與輸入角速度成正比,則可實時解算諧振振型直接輸出角度信號。此模式諧振振型處于自由進動狀態,因此測量范圍大,動態性能好,線性度高。新型工作模式即自校準式,是利用交換激勵檢測模態,進行陀螺零偏的自校準,通過跟蹤進動因子,進行力平衡模式比例因子的自校準,此模式可將陀螺精度提高1個數量級[15]。
2 國內外研究現狀
美國、法國、俄羅斯在HRG的研制中處于領先地位,目前它們的HRG已經成功應用到衛星、飛機、空間飛行器、海洋船舶,陸地導航等領域。英國、日本近年來也開始了HRG的研制。國內的HRG研究起步較晚,但目前也取得很大突破,并已應用到衛星導航中。
1986—1990年,HRG研究取得許多突破:例如,提出利用激光進行質量清除的諧振子平衡器、改進關鍵工藝、開發新的諧振子制造方法來改善陀螺的時間常數等,先后研制出HRG158系列、直徑為30 mm的HRG130T。美國最早研究旋轉慣性導航系統就使用了Delco公司專門研制的半球諧振陀螺,基于HRG158X開發的Carousel-400慣導系統為旋轉慣導系統的代表作品,該系統將HRG集成于6軸冗余導航系統中,成為首個運用到航空領域的HRG。
法國的半球諧振陀螺研制,在全球屬于領先地位,代表性的公司為法國賽峰公司,其集團旗下的薩基姆(Sagem)公司自20世紀90年代開始研究HRG技術,之后在半球諧振陀螺關鍵技術如諧振子加工、諧振子調平、高精度控制電路等方面提出技術方案,如圖4所示。
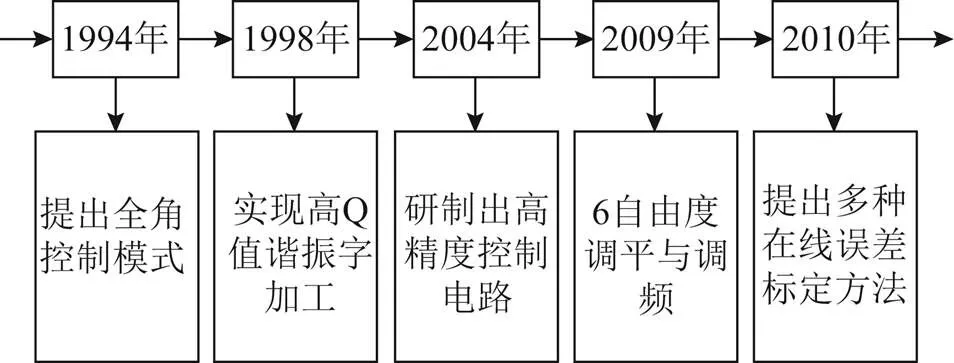
圖4 Sagem公司技術研發進度
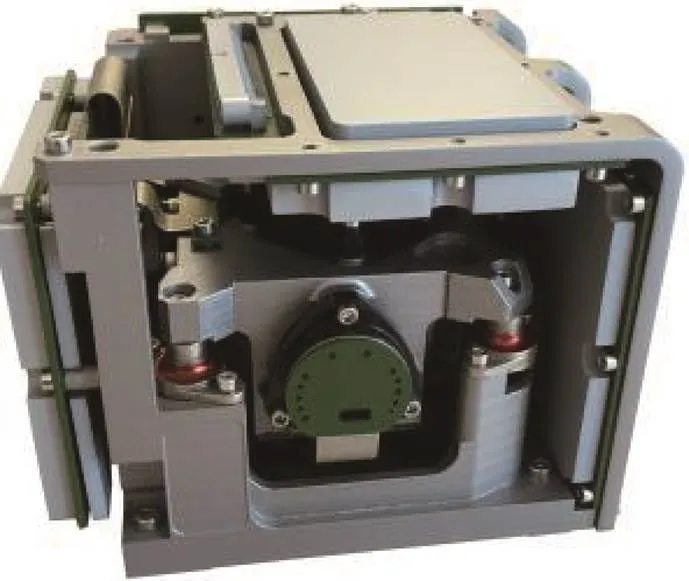
圖5 ONYX慣導系統

表1 ONYX性能參數
目前ONYX已經成功應用于法國陸軍的獅鷲(Griffon)輪式裝甲車系統、GEONYX陸地系統、ARIANE6型火箭、PAVAM單兵導航等項目。
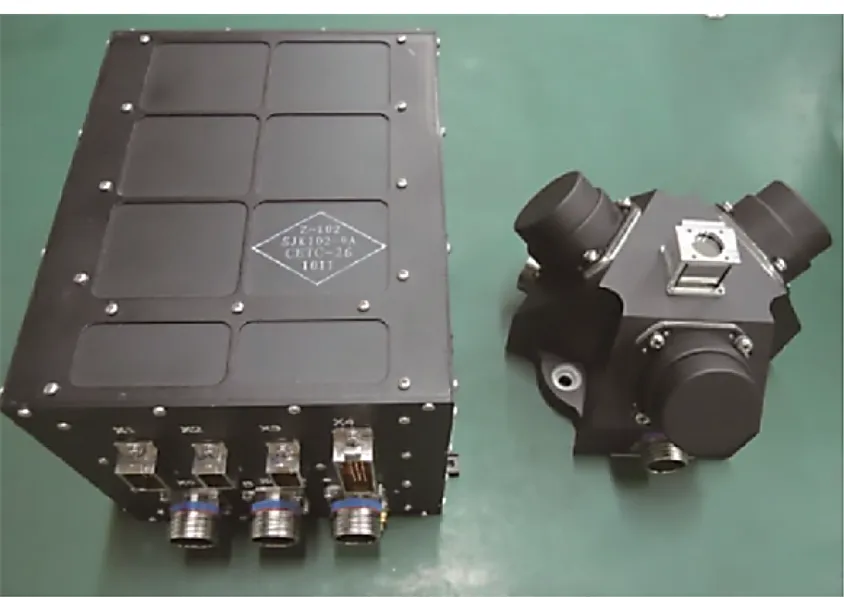
圖6 實踐-9號衛星半球諧振陀螺姿態敏感器

圖7 國防科大研制的微半球諧振陀螺樣機
3 HRG在海洋導航定位中的應用與分析
3.1 HRG在海洋導航定位中的應用
20世紀80年代起,HRG就開始運用到航空航天導航領域,但是HRG在海洋導航定位領域的應用,在近些年才開始得到發展。在海洋導航定位領域,HRG主要應用于航姿參考系統與慣性導航系統。
HRG結構簡單、高精度、高可靠性、免維護等品質滿足了長航時運行而無需維護的船舶導航。法國賽峰電子與防務公司在HRG的海洋導航定位研究中占主導地位。賽峰公司為商船、工程船舶、近海船、各種規模的軍艦和潛艇提供高性能、高精度的導航系統,主要推出了面向水面艦艇的BLUENAUTE系列、ARGONYX系列和面向海軍潛艇的BLACK-ONYX系列的慣性導航系統。這3種慣性導航系統都是基于賽峰公司的HRG Crystal技術研發的,賽峰公司在海洋導航定位領域主推產品為BLUENAUTE系列慣性導航系統(如圖8所示)。

圖8 BLUENAUTE系列慣導系統
3.2 HRG在海洋導航領域應用潛力分析
除了半球諧振陀螺,海洋導航定位慣性導航系統采用的陀螺還主要包括:液浮陀螺、靜電陀螺、激光陀螺、光纖陀螺等。
美國20世紀80年代以前的水面艦船與潛艇,廣泛應用液浮陀螺,20世紀從80年代開始,在戰略核潛艇上裝備靜電陀螺。90年代以后,激光陀螺普遍裝備在水面艦艇與部分戰術攻擊核潛艇上,戰略核潛艇裝備了新一代靜電陀螺。目前美國正用光纖陀螺替換激光陀螺,水面艦艇已經完成了替換工作[37]。
我國大部分水面艦船的慣導系統,采用的是液浮陀螺。戰略核潛艇主要使用靜電陀螺,我國早期使用的為俄產靜電陀螺,近年來國產靜電陀螺水平已經接近美國早期水平,國產靜電陀螺也開始裝備到核潛艇上。
法國在20世紀90年代中后期,裝備的慣性導航系統是激光陀螺,近年來光纖陀螺得到發展,開始裝備艦船。法國目前積極研究半球諧振陀螺,并將逐步裝備到各型水面艦船與潛艇上[37]。
未來的慣性導航系統將以高精度、高可靠性、高穩定性、長使用壽命、抗干擾能力強為目標[38],半球諧振陀螺的特點滿足未來慣導系統的技術要求,是新一代艦船慣性導航系統的理想慣性元件。表2列出了各代海洋導航定位慣性導航系統采用的各種陀螺,并對半球諧振陀螺與其他各種陀螺性能進行比較分析,對半球諧振陀螺進行潛力分析。
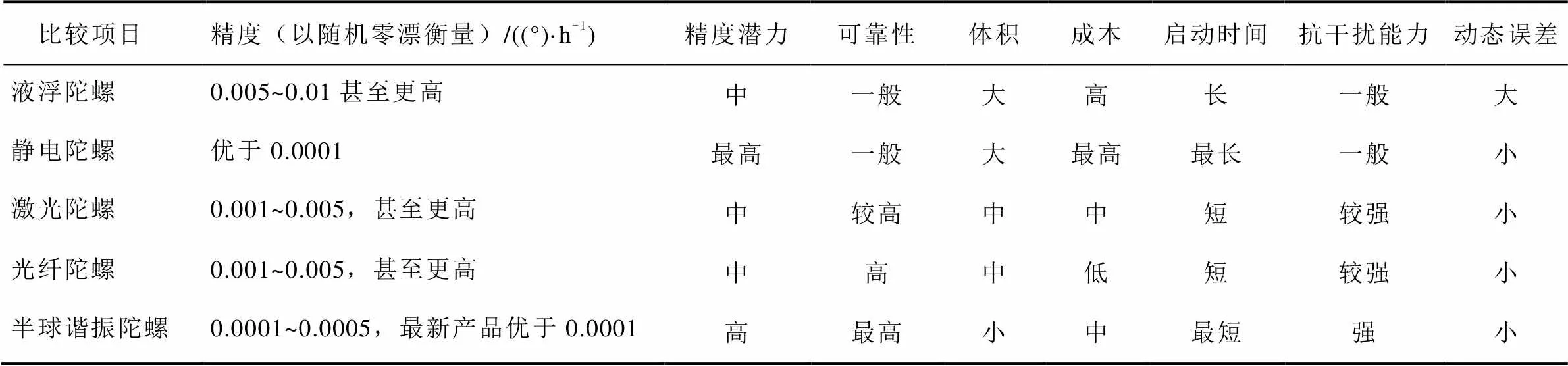
表2 海洋導航定位慣性技術比較
分析表2可以得出:靜電陀螺是目前精度水平最高的陀螺,適用于潛艇等高精度場合,HRG的精度次于靜電陀螺。HRG的精度目前無法超越靜電陀螺。但是HRG相比于靜電陀螺,有著成本低、啟動時間短、抗干擾能力強、體積小等優點。靜電陀螺是導航系統中費用最高的元件,這限制了它的進一步推廣與發展。對于光纖陀螺與激光陀螺,其優勢主要體現在成本方面,精度有一定的發展潛力,但是與HRG相比,精度較低。HRG可以滿足我國海軍長航時作戰艦艇對長航時工作、高精度、高可靠性、高抗干擾能力的慣性導航系統的需求。綜上所述,HRG相比其他陀螺有著更好的發展前景。
但是,HRG也存在著一些限制其發展及推廣的短板:
1)目前HRG的制造成本較高,單只HRG高達10萬~100萬美元,不利于其市場開拓及工程化應用。
2)由于石英半球諧振子的加工與裝配工藝限制,而其壁薄、形狀復雜、對加工精度要求高,制約了HRG的研制。同時,在半球諧振陀螺裝配過程中,諧振子、激勵罩與讀出基座間存在裝配間隙誤差,影響其均勻性和對稱性,導致半球諧振陀螺的諧振中心偏離質心和形心,影響半球諧振陀螺的精度。
3)測控電路對諧振子的振動控制的不精確性,也是限制HRG精度的1個因素,因此需要進一步研究高分辨率的測控電路[39]。
4 HRG發展趨勢
隨著科技水平的發展及制造工藝的提高,半球諧振陀螺技術也隨之加速發展。半球諧振陀螺未來的發展趨勢主要為以下幾個方面:
1)向更高性能化發展。更高性能是指更高精度、更低成本、系統體積更小、功耗更低。目前國內研究的半球諧振陀螺精度和國外研制的半球諧振陀螺相比差距較大,還有很大進步空間。可以通過設計更高分辨率測控電路[40]或提高加工與裝配精度2方面來降低誤差,提高精度。不斷減小半球諧振陀螺的體積、成本、功耗等性能是推進半球諧振陀螺發展的必然趨勢。未來需要在保證半球諧振陀螺的精度與可靠性等優勢的前提下,不斷減小整個半球諧振陀螺慣導系統的成本、體積、質量和功耗,使整個慣導系統的C+SWaP優于其他傳統陀螺。
3)在海洋導航領域將取代光學陀螺。隨著科研水平的提高和制造工藝的發展,半球諧振陀螺的各項性能得到改善,導航的精確性、連續性、可靠性、價格成本等優勢越來越突出。在未來幾十年,半球諧振陀螺將取代光學陀螺,成為新一代海洋導航慣性導航系統慣性器件的可能性很大。
5 結束語
半球諧振陀螺是1種新型的固態振動陀螺,具有高精度、高可靠性、長使用壽命等優點,已經在航空航天領域得到了廣泛應用,各方面性能都得到驗證。半球諧振陀螺技術將進一步發展,應用也會更加普遍,在海洋導航領域的應用也有著較好的發展前景。但是國內半球諧振陀螺研制技術尚處于起步階段,與國外有著較大的差距,精度和尺寸等性能參數有進一步提升的空間。半球諧振陀螺技術的發展,對我國的國防安全和科技發展有著重要的作用,對綜合定位、導航、授時(positioning, navigation and timing, PNT)體系的建設有重要意義。
[1] PERSSON A. How do we understand the Coriolis force ?[J]. Bulletin of the American Meteorological Society, 1998, 79(7): 1373-1386.
[2] ROZELLE D M. The hemispherical resonator gyro: from wineglass to the planets[C]//Space Flight Mechanics Committee. Proceedings of the 19th AAS/AIAA Space Flight Mechanics Meeting. Savannah, USA: Space Flight Mechanics Committee, 2009: 1157-1178.
[3] 呂志清. 半球諧振陀螺在宇宙飛船上的應用[J]. 壓電與聲光, 1999, 21(5): 349-353.
[4] Anon. Northrop Grunnan′s hemispherical resonator gyro matks 30 million operating hours in space[EB/OL]. [2019-10-26]. http://news.northropgrumman.com/news/leleases/Northrop-grumman-s-hemispherical-resonator-gyro-marks-30-million-operating-hours-in-space.
[5] 毛海燕, 梁宇, 袁小平, 等. 半球諧振陀螺現狀及發展趨勢[J]. 壓電與聲光, 2014, 36(4): 584-587.
[6] 高勝利. 半球諧振陀螺的分析與研究[D]. 哈爾濱: 哈爾濱工程大學, 2008.
[7] 方針, 劉書海, 余波. 半球諧振陀螺的基礎理論研究[J]. 導航定位與授時, 2017, 4(2): 72-78.
[8] 徐志強, 劉建梅, 王振, 等. 石英半球諧振子精密加工技術探討[J]. 導航與控制, 2019, 18(2): 69-76.
[9] 楊倩. 基于半球諧振陀螺的慣性導航系統研究[D]. 哈爾濱: 哈爾濱工業大學, 2007.
[10] WANG X, WU W, LOU B, et al. The modeling of hemispherical resonator gyro and its space applications[C]//The International Society for Optics and Photonics (SPIE). Proceedings of the 7th International Symposium on Precision Engineering Measurements and Instrumentation. Yunnan, China: SPIE, 2011: 8321-8324.
[11] MATTHEWS A, RYBAK F J. Comparison of hemispherical resonator gyro and optical gyros[J]. IEEE Aerospace and Electronic Systems Magazine, 1992, 7(5): 40-46.
[12] 于翔宇, 張嵐昕, 段杰, 等. 全角模式半球諧振陀螺振型控制與角度檢測[J]. 導航與控制, 2019, 18(2): 33-38, 76.
[13] 趙萬良, 成宇翔, 孫殿竣, 等. MEMS半球諧振陀螺的角速度積分及其FPGA設計[J]. 半導體光電, 2017, 38(1): 40-44.
[14] 王旭, 吳文啟, 方針, 等. 力平衡模式下半球諧振陀螺正交誤差控制[J]. 儀器儀表學報, 2012, 33(4): 936-941.
[15] TRUSOV A A, PHILLIPS M R, MCCAMMON G H, et al. Continuously self-calibrating CVG system using hemispherical resonator gyroscopes[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of 2015 IEEE International Symposium on Inertial Sensors and Systems (ISISS). Hapuna Beach, USA: IEEE, 2015: 1-4.
[16] BRYAN G H. On the beats in the vibrations of a revolving cylinder or bell[C]//University of Cambridge. Proceedings of the Cambridge Philosophical Society. Cambs, UK: University of Cambridge, 1890, 7(24): 101-111.
[17] LYNCH D D, MATTHEWS A, VARTY G T. Innovative mechanizations to optimize inertial sensors for high or low rate operations[C]//German Society for Positioning and Navigation. Proceedings of Symposium Gyro Technology. Stuttgart, Germany: German Society for Positioning and Navigation, 1997: 109-130.
[18] DICKINSON J, STRANDT C R. HRG strapdown navigator[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of the IEEE Symposium on Position Location and Navigation. Las Vegas, USA: IEEE, 1990: 110-117.
[19] ANTHONY M. The operation and mechanization of the hemispherical resonator gyroscope[C]//The Institute of Electrical and Electronics Engineers (IEEE). Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS). Monterey, USA: IEEE, 2018: 7-14.
[20] LOPER E J, LYNCH D D. Hemispherical resonator gyro-status report and test results[C]//Institute of Navigation. Proceedings of the National Technical Meeting. San Diego, USA: Institute of Navigation, 1984: 105-107.
[21] 郭宗本. 旋轉調制式捷聯慣導系統初始對準技術研究[D]. 北京: 北京航空航天大學, 2008.
[22] 楊建業, 汪立新, 張勝修, 等. 半球諧振陀螺旋轉慣導系統誤差抑制機理研究[J]. 宇航學報, 2010, 31(10): 2321-2327.
[23] 潘瑤, 曲天良, 楊開勇, 等. 半球諧振陀螺研究現狀與發展趨勢[J]. 導航定位與授時, 2017, 4(2): 9-13.
[24] MEYER D, ROZELLE D. Milli-HRG inertial navigation system[J]. Gyroscopy and Navigation, 2012, 3(4): 227-234.
[25] 彭慧, 方針, 譚文躍, 等. 半球諧振陀螺發展的技術特征[J]. 導航定位與授時, 2019, 6(4): 108-114.
[26] REMILLIEUX G, DELHAYE F. Sagem Coriolis vibrating gyros: a vision realized[EB/OL]. [2019-10-26]. https: //www. researchgate. net/publication/283814118_Sagem_Coriolis_Vibrating_Gyros_A_vision_realized.
[27] CLERC S, MARTELLA P, DURRANT D, et al. Development of the european IMU for space applications[C]//Aerospace Research Central (ARC). Proceedings of the AIAA Guidance, Navigation, and Control Conference. Florida, USA: ARC, 2009: 5870.
[28] JEANROY A, BOUVET A, REMILLIEUX G. HRG and marine applications[J]. Gyroscopy and Navigation, 2014, 5(2): 67-74.
[29] DELHAYE F. HRG by SAFRAN: the game-changing technology[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of the 5th IEEE International Symposium on Inertial Sensors and Systems (INERTIAL). Lake Como, Italy: IEEE, 2018: 1-4.
[30] 薛連莉, 戴敏, 葛悅濤, 等. 2018年國外慣性技術發展與回顧[J].飛航導彈, 2019(4): 16-21.
[31] DELEAUX B, LENOIR Y. The world smallest, most accurate and reliable pure inertial navigator: ONYX?[C]//IEEE Aerospace and Electronic Systems Society (IEEE AESS). Proceedings of the 2018 DGON Inertial Sensors and Systems (ISS). Braunschweig, Germany: IEEE, 2018: 1-24.
[32] 呂志清. 半球諧振陀螺(HRG)研究現狀及發展趨勢[C]//中國慣性技術學會. 2003年慣性技術科技工作者研討會論文集. 北京: 中國慣性技術學會, 2003: 106-108.
[33] 方針, 余波, 彭慧, 等. 半球諧振陀螺技術發展概述[J]. 導航與控制, 2015, 14(3): 2-7.
[34] 帥鵬, 魏學寶, 鄧亮. 半球諧振陀螺發展綜述[J]. 導航定位與授時, 2018, 5(6): 17-24.
[35] 石巖, 席翔, 吳學忠, 等. 微半球諧振陀螺技術研究進展[J]. 導航與控制, 2019, 18(2): 1-8.
[36] LI W, XI X, LU K, et al. A novel high transduction efficiency micro shell resonator gyroscope with 16 T-shape masses using out-of-plane electrodes[J]. IEEE Sensors Journal, 2019, 19(13): 4820-4828.
[37] 劉飛, 馬林. 艦艇慣性導航技術現狀及發展趨勢[J]. 中國造船, 2011, 52(4): 282-293.
[38] 許江寧. 淺析水下PNT體系及其關鍵技術[J]. 導航定位與授時, 2017, 4(1): 1-6.
[39] 張鈺瑩, 張衛, 崔峰, 等. 基于FPGA的壓電半球諧振陀螺數字測控系統設計[J].半導體光電, 2019, 40(3): 313-317.
[40] 何杰, 樸繼軍, 朱玲瑞, 等. 先進微陀螺器件及微慣性測量單元最新研究進展[J].壓電與聲光, 2019, 41(3): 410-415.
[41] 莊須葉, 王世和, 李平華, 等. 微型化半球陀螺制備工藝發展現狀及趨勢分析[J].導航與控制, 2019, 18(2): 52-60.
[42] 汪紅兵, 林丙濤, 梅松, 等. 微半球諧振陀螺技術研究進展[J].微納電子技術, 2017, 54(11): 772-780.
Application of hemispheric resonant gyro in marine navigation and positioning
LI Ding, XU Jiangning, HE Hongyang
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
In order to further study on the inertial navigation system, the paper introduced a solid-state vibrating gyroscope with high precision, high stability and long service life: the structure and working principle of the hemispheric resonant gyro were given, and the domestic and foreign development history, research status and practical application were described, finally the development potential and development trend of hemispherical resonant gyro in marine navigation and positioning were analyzed.
hemispherical resonant gyro; navigation; inertial technology; marine navigation
P228
A
2095-4999(2020)03-0023-09
李鼎,許江寧,何泓洋. 半球諧振陀螺在海洋導航定位中的應用[J]. 導航定位學報, 2020, 8(3): 23-31.(LI Ding, XU Jiangning, HE Hongyang. Application of hemispheric resonant gyro in marine navigation and positioning[J]. Journal of Navigation and Positioning, 2020, 8(3): 23-31.)
10.16547/j.cnki.10-1096.20200304.
2019-12-16
國家重點研發計劃項目(2016YFB0501700, 2016YFB0501701)。
李鼎(1997—),男,湖南益陽人,碩士研究生,研究方向為慣性技術及應用。
許江寧(1964—),男,江西九江人,博士,教授,研究方向為慣性技術及應用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32