無人測量船在淮河崩岸監測中的應用
2020-06-10 08:18:54袁國友
治淮 2020年4期
袁國友
(安徽省淮河河道管理局測繪院 蚌埠 233000)
1 引言
無人船是一種可以無需遙控,借助精確GNSS衛星定位和自身傳感即可按照預設任務在水面航行的全自動水面機器人,英文縮寫為USV。無人船系統融合了船舶、通信、自動化、機器人控制、遠程監控、網絡化系統等技術,實現了自主導航、智能避障、遠程通信、視頻實時傳輸和網絡化監控等功能,可廣泛應用于水下地形測繪、環境監測、科研勘探、搜索救援、水域巡查乃至軍事領域。
2 無人船測量系統工作原理及特點
2.1 無人船測量系統工作原理
無人船系統分為船體系統和作業系統,船體系統包含避障、視頻系統、導航系統、動力系統、通訊系統、船體構造,作業系統包含測深系統、GNSS定位系統。
無人船測量系統是整個無人船系統的核心,承擔著水深測量和導航定位任務,整個測量系統主要由數字測深儀、姿態傳感器、GNSS 接收機、全角度攝像頭及距離傳感器等多種高精密傳感設備。
整個系統的導航定位采用GNSS-RTK 動態差分定位原理(如圖1 所示),在岸基架設GNSS 基準站接收GNSS 衛星信號并將差分數據發送給無人船上安置的GNSS 接收機,實現實時定位和導航功能。
無人船的核心設備之一是測深儀,水深測量由安置在船上的數字測深儀完成,其基本原理是利用換能器將電能轉換成聲能并向水底發射。聲能以回波的形式從水底返回,再通過換能器檢測回波電能信號,從而計算出傳播時間,根據聲速和時間計算出水深,在屏幕顯示出來,并且顯示回波圖形。
2.2 無人船的特點
無人船測量系統具有以下特點:(1)獨立導航功能。在無人船中裝備有智能芯片,通過芯片工作人員可實時獲取無人船的GNSSS 路線,并將之與預先設定的航線坐標對比,這樣可以實時進行航線的調整。(2)智能避障功能。無人船的船頭部分安裝有攝像機和距離傳感器,工作人員可以實時監控無人船的航行情況,一旦遭遇障礙物時,傳感器可迅速傳遞距離信息給智能芯片,這時無人船會根據預設的安全距離數值,果斷采取避讓或停止的動作,提升了無人船測量工作的效率和安全性。(3)實時通訊功能。無人船系統還安裝有數據傳輸設備和實時地圖傳輸設備,依托這兩種設備無人船可與岸上操控中心進行數據的實時對接。(4)具有平穩、持久的航行能力。無人測量船在硬件上作出了一些改進和調整,如將傳統船只單體設計變為三體設計,降低了船只重心,顯著改善了其抗風浪的能力,使船在行駛中更加平穩。
3 無人船水下地形測量實例
3.1 項目概況
安徽省淮河河道管理局測繪院承擔了淮河干流安徽段10 余處崩岸的定期觀測任務,其中包括潁上境內的高臺孜、王臺孜,鳳臺境內的流沙洼、喬口孜、新建隊、啞巴渡,潘集境內的光明、南湖等崩岸。由于上述崩岸每年沖淤變化比較大,河岸呈現不同程度的刷岸,河床呈現不同程度下切,安徽省淮河河道管理局對此保持特別關注,要求局測繪院每年汛前采用“斷面法”測量,并對崩岸變化進行斷面套繪、分析,及時發現險情,采取相應措施防護處理。測繪內容包括1 ∶1000 地形圖及斷面圖,斷面間距設為25~50m。
3.2 外業數據采集
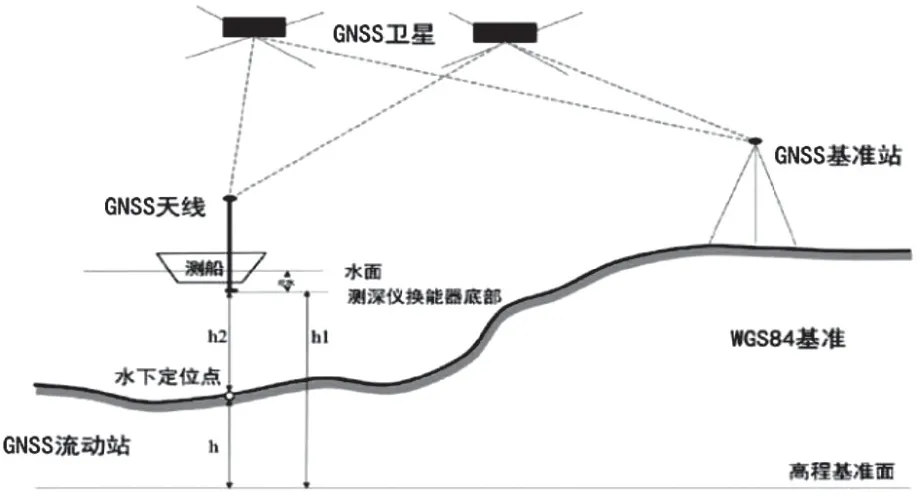
圖1 無人船測量系統基本原理示意圖
考慮大部分崩岸距離確保堤防較近,地形圖及斷面測量范圍測至確保堤防背水側,測量包括陸上及水下兩個部分,陸上部分主要采用GNSSS-RTK 測量。RTK 定位技術就是基于載波相位觀測值的實時動態定位技術,實時提供測站點在指定坐標系中相應點的X、Y、Z 三維坐標。北斗衛星的投入使用,GNSS 接收機能搜索到更多的共同解算衛星,使GNSS 接收機工作更穩定。
水下地形部分采用無人船用“斷面法”進行測量。為提高水下測量的精度和效率,安徽省淮河河道管理局測繪院中海達公司IBOAT BS2 多功能智能無人船測量系統,該設備搭載衛星定位系統、波束測深儀、發射電臺、智能導航系統等軟硬件設備,能夠實現自動設定航線、自動采集數據、自動導航及進行遠程操作等功能,具有智能化高、攜帶方便等優點。在崩岸測量中,由于按航線自動導航作業時有一定的轉彎半徑,可提前在障礙物周圍做好規避航線,實際外圍自動導航作業后還要手動遙控貼近障礙區域采集水深數據,盡可能采集完整。作業要求按1 ∶1000 測量水下地形,航線間隔25m,航向數據采樣點間距5m,地形起伏較大處適當加密。
3.3 數據處理
測量工作完成后,可以進行數據改正,數據后處理。獲得的數據還不能直接使用,需要進行粗差剔除和數據抽稀,對實時獲得的水面高程和水深數據進行處理得到水底正高數據。及時將實測數據轉存至計算機并生成原始文件,使用南方CASS7.1 繪制出崩岸地形圖。
將所有數據展繪于地形圖上,并參照斷面線檢查數據是否遺漏,點位間距是否合適,斷面點位偏離是否超限等。經初檢無問題則導入Excel進行處理。將屬于同一斷面的數據集合在一起,并按自左岸到右岸的次序排列,計算各點在斷面線上的映射點到基點之間的距離和各點偏離斷面線距離,并整理成斷面數據成果表。由斷面成果表將數據整理為繪制斷面圖需要的格式,采用專業繪圖軟件繪制dwg 格式的橫斷面圖。橫斷面圖橫比例尺為1 ∶1000,縱比例尺為1 ∶100。
地形圖及斷面圖繪制完成后,利用該段崩岸歷史資料中的地形圖及斷面進行套繪比較,并結合本段崩岸的地質及相應時段的水文、水沙特性,對該段崩岸的河岸、河床變化進行分析。
3.4 精度檢核
每處崩岸采集中提取了10 個特征點,通過人工測量的方式(漁船攜帶中海達HDmax 測深儀)驗證數據的準確性。經數據對比,平面誤差均在10cm 內,水深數據誤差在5cm,最大誤差為8cm,滿足項目要求。
4 結語
經上述實例驗證,利用無人船水下測量技術獲取水下地形數據,能夠滿足大比例尺地形圖水下地形測量的精度要求,且在復雜水域條件下,能夠大大降低測繪人員的勞動強度,成倍提高了外業測量效率,避免了外業人員水上作業的危險,對促進測繪單位的發展、增強市場競爭力、提高技術服務水平大有裨益,具有良好的市場前景和發展趨勢■
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中國公共安全(2017年7期)2017-10-13 08:18:11
家庭影院技術(2017年9期)2017-09-26 03:41:45
