歐洲業務集合預報系統進展
2020-06-03 03:43:56陳超輝王勇杜鈞何宏讓劉宇迪姜勇強
關鍵詞:系統
陳超輝 王勇 杜鈞 何宏讓 劉宇迪 姜勇強
(1 國防科技大學氣象海洋學院,南京 211101;2 奧地利氣象局,維也納 奧地利 1190; 3 美國國家海洋大氣局國家環境預報中心,美國 馬里蘭 20740)
0 引言
天氣預報能帶來大量的社會效益,無論是極端天氣預警,還是農業規劃[1]。目前實現這一目標的主要手段是運用建立在復雜數理基礎上的數值天氣模式以及各種常規和遙感技術獲取的大量觀測資料通過大規模超級計算機產生的數值天氣預報。但由于高度非線性大氣運動所具有的混沌特性,數值預報模式初值的微小誤差或者模式自身誤差都可能導致單一確定性數值預報結果與實況天氣之間存在較大偏差[2]。
為此,27年前歐洲中期天氣預報中心ECMWF(European Centre for Medium-Range Weather Forecasts)[3-4]和美國國家環境預報中心NCEP(National Centers for Environmental Prediction)[5-6]發布了人類歷史上首批業務集合預報。隨后,加拿大氣象局MSC(Meteorological Service of Canada)在1996年也開始發布業務集合預報,隨后世界上其他氣象中心,如法國、英國、日本、澳大利亞、南非等國也先后進行了跟進,中國氣象局國家氣象中心也于1996年5月下旬開始著手并建立集合預報業務[7]。發展至今,集合預報不僅用于模式的預報過程,即為中短期、月尺度和季節性時間尺度提供預報預測,還用于模式的分析過程,為整個地球系統提供更好的初始狀態估計。大量學者也針對其進展進行了詳細梳理。例如,杜鈞[8]綜合論述了集合預報的概念、基本問題與集合預報應用及發展前景;孔凡鈾[9]針對雷暴尺度天氣集合數值預報所面臨的科學問題、主要構造技術、研究現狀及存在的問題等做了力所能及的探討;李澤椿等[7]回顧了國家氣象中心集合數值預報系統的開發過程、業務系統組成和集合預報產品的解釋與應用等;陳靜等[10]系統總結了集合預報概念、系統組成、初始擾動理論以及產品解釋與應用方面的研究。此外,王晨稀[11]、段明鏗等[12]、麻巨慧等[13]和張涵斌等[14]分別從熱帶氣旋集合預報研究、集合預報方法研究、NCEP與ECMWF及CMC三家極具代表性的全球集合預報業務系統、區域集合預報擾動方法研究等不同視角梳理了集合預報的工作進展。
總體而言,這些文獻主要聚焦集合預報初始擾動技術、模式擾動技術、多模式集合預報、集合預報產品與檢驗等方面,理論歸納相對較多,而專門針對業務系統發展與應用的相對較少;再者,對于歐洲業務集合預報,行業內注意力幾乎全部集中在歐洲全球中期業務集合預報,而對于歐洲范圍內的有限區域高分辨集合預報業務關注甚少;此外,還存在一個重要的事實,即歐洲業務集合預報相比世界其他氣象中心的業務集合預報存在明顯的優勢,并將這種優勢奇跡般地保持至今。基于上述背景分析,從業務發展與應用角度進行歐洲業務集合預報歸納并梳理(包括全球業務集合預報與有限區域高分辨業務集合預報)顯得十分必要。作者認為研究與借鑒歐洲業務集合預報的發展思路,不僅對集合預報理論創新有幫助,還對開展集合預報業務有重要意義。
本文包括以下3 部分內容:第1 部分是關于ECMWF全球業務集合預報歷史沿革及發展概況;第2部分描述歐洲主要國家的有限區域高分辨業務集合預報系統;最后一部分概要介紹歐洲集合預報的動態,仍存在的問題、挑戰及未來方向。
1 ECMWF全球業務集合預報歷史沿革及發展概況
ECMWF作為一個具有廣泛影響力的世界氣象中心,如何客觀看待其發展,十分重要。當前大部分的注意力主要集中于集合預報理論與方法總結,本節內容以一種全新的視角看待歐洲業務集合預報的發展,即從集合預報業務系統整體升級的角度進行探討。歐洲業務集合預報狹義上是指歐洲中期天氣預報中心提供的全球中期業務集合預報,它的出現使得預報員和用戶不僅能夠獲得未來大氣狀態,還能針對未來大氣可能出現的情況進行可靠性與準確性估計。其發展、實施與運維主要歸功于ECMWF及其成員國許多人的工作,也歸功于多年來與ECMWF一起工作以了解其性能并進一步提高集合預報業務水平的世界各國訪問學者的工作。這里主要以業務系統配置升級為主線,討論ECMWF如何從1992年第1次集合預報開始,發展到今天的水平,包括集合預報系統的五個關鍵特征,即用來模擬初始不確定性的方法、用來模擬模式不確定性或模式近似的方法、集合預報系統水平和垂直分辨率、預報時效、集合預報成員個數。
表1給出了從1992年11月至2019年6月的ECMWF全球業務集合預報系統的關鍵特征隨時間的升級演變,易知ECMWF集合預報進行了數次升級。第1列表示配置升級時間,第2列表示系統升級特征的關鍵字描述,第3列至第8列分別為刻畫初值不確定性的初始擾動關鍵特征:水平分辨率、垂直層數、用于計算奇異向量的最優時間間隔、優化區域、前區增長不確定性和后區增長不確定性的模擬方法。第9列至第15列代表預報階段的系統關鍵特征:水平分辨率、垂直層數、預報時效(以d為單位)、集合成員個數、模式不確定性處理方法、與海洋模式耦合以及回報套件的規模(以成員和年份為度量單位)等。

件20a 20a 20a 20a 20a 20a 套報NO NO NO NO NO NO NO NO NO NO NO NO NO NO NO回耦合否NO NO NO NO NO NO NO NO NO NO NO NO NO NO NO是HOPE from d10 1×5×18a HOPE from d10 1×5×18a HOPE from d10 1×5×18a HOPE from d10 1×5×18a NEMO from d0 2×11×NEMO from d0 2×11×置 性配式定模確NO統NO NO NO NO NO NO STP STP STP STP STP STP STP STP STP STP revSTP revSTP系不revSTP revSTP報預和 成個員數33 33 33 33 33 51 51 51 51 51 51 51 51 51 51 51 51 51 51 51 revSTP+BS HOPE from d10 1×5×18a 51 revSTP+BS NEMO from d10 1×5×18a 51 revSTP+BS NEMO from d10 1×5×20a 51 revSTP+BS NEMO from d0 1×5×20a 51 revSTP+BS NEMO from d0 2×11×51 revSTP+BS NEMO from d0 2×11×51 revSTP+BS NEMO from d0 2×11×51 revSTP+BS NEMO from d0 2×11×51 51計性估報效預時定10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 10 d 15 d 15 d/32 d 確15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/32 d 15 d/46 d 15 d/46 d 15 d/46 d 15 d/46 d 15 d/46 d 15 d/46 d 不式層模垂直L19 L19 L19 L19 L19 L31 L31 L31 L40 L40 L40 L40 L40 L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L62 15) L91 15) L91 45) L91 45) L91 45) L91 45) L91 45) L91化 變格平T63 T63要T63 T63 T63主TL159 TL159水TL159 TL159 TL255 TL255 TL255 TL255 TL399配的置報預 性距合區定后確集不SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI SVINI TL399(0~10)/TL255(10~SVINI TL399(0~10)/TL255(10~SVINI TL399(0~10)/TL255(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~10)/TL319(10~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~SVINI TL639(0~15)/TL319(15~務業 性區定球前確NO NO NO NO NO 1 ECMWF全EDA)不Table 1 Time evolution of some key characteristics of the ECMWF operational global medium-range ensemble (OG-ENS) between inception (November 1992) and today (June 2019)SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO SVEVO 10*EDA 10*EDA 10*EDA 10*EDA 25*EDA 25*EDA 25*EDA 25*EDA 25*EDA 25*EDA 50*EDA(SVs和globe 化域計優區NHx NHx NHx估(NH+SH)x(NH+SH)x(NH+SH)x(NH+SH)x(NH+SH)x(NH+SH)x表性定(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC(NH+SH)x+TC確不始化隔優間36 h 36 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48 h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h 48h初直數垂層L19 L19 L19 L19 L19 L31 L31 L31 L40 L40 L40 L40 L40 L62 L62 L62 L62 L62 L62 L62 L62 L62 L91 L91 L91 L91 L91 L91 L91 平率水辨分T21 T21 T21 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42 T42述描字鍵關Oper Impl SV LPO SV OTI SV hor resol NH+SH SV resol/mem EVO SV Stoch sch SPPT vert resol FC hor resol TC SVs sampling rev sampl resolution VAREPS VAREPS mon Rev SPPT hor resol EDA EPS Rev Stoch scheme New ocean model Rev EDA-pert & refc suite vert resol & coupling from d0 Extension to 46d and REFC suite to 22m T42 hor resol Ocean (Horizontal & vertical)Rev EDA Model error changes Rev DA /mem月/年 間時199212 199302 199408 199503 199603 199612 199803 199810 199910 200011 200201 200409 200506 200602 200609 200803 200909 201001 201006 201011 201111 201206 201311 201505 201603 201611 201707 201806 201906
由表1知,1992年12月ECMWF正式開展集合預報業務,集合預報一周運行3次,即每周五、周六、周日00時(世界時,下同)開始運行,初值擾動范圍覆蓋全球,初值不確定性僅采用初始奇異向量模擬,其水平與垂直分辨率分別為T21和L19,奇異向量計算優化時間間隔為36 h,初始擾動集合正負成對分布;在預報階段,預報模式分辨率為T63L19 (約320 km),預報長度為10 d,系統包括33個集合成員,不考慮模式不確定性、不考慮與海洋或海冰模式耦合,也不考慮回報套件。1993年2月,為了處理奇異向量主要集中在南半球的問題,ECMWF引入了局地投影運算算子(Local Projector Operator,LPO),使得奇異向量分布在北半球,這對北半球集合預報的可靠性有重大影響。1994年8月,ECMWF為了改善集合離散度,計算奇異向量的優化時間間隔(optimization time interval,OTI)從36 h增加到48 h,從而改善了超出OTI以外的擾動增長,并從1994年5月1日起,于每日00時生成一次集合預報。1995年3月,ECMWF計算SVs的水平分辨率提高到T42,水平分辨率的提高改善了擾動增長,從而提高了集合預報的可靠性。1996年3月,ECMWF為解決南半球的擾動增長,引入了一套新SVs,它對南半球的集合預報可靠性有重大影響。1996年12月,集合預報的預報階段模式分辨率提高到TL159L31(約120 km),成員個數從33個增加到51個。1998年3月,ECMWF開始引入演化SVs[15](Evolved Singular Vectors,簡稱EVO SVs),演化SVs主要模擬起報時間前兩天的誤差增長效果,實踐表明初始SVs加入演化SVs能夠改善集合預報離散度,尤其在較短預報時效范圍內效果顯著。1998年10月,ECMWF開始考慮與物理參數化相聯系的模式不確定性問題,引入了隨機擾動參數化傾向方案[16](Stochastic Perturbed Parameterization Tendency,SPPT),這種方案在整個預報長度范圍內,對改善集合預報系統離散度和可靠性有顯著效果,尤其是在熱帶地區。1999年10月,計算SVs的模式垂直層數從31層增加到40層。
2000年11月,集合預報系統水平分辨率從TL159提高到TL255(約80 km)。2002年1月,ECMWF增加了容易出現熱帶低氣壓的熱帶地區SVs,效果表明這種方案能夠改善熱帶地區的集合離散度,尤其在出現熱帶風暴的天氣背景下。2004年9月,ECMWF在集合預報初始擾動生成階段采用的采樣策略更改為高斯采樣[17],并于2005年6月改進了高斯采樣方法。2006年2月,集合預報系統水平分辨率開始從TL255L40提高到TL399L62(約60 km)。2006年9月,ECMWF基于可變分辨率集合預報(Variable Resolution Ensemble Prediction System,VAREPS)思路[18]將集合預報長度延至15 d,即在第10天預報模式分辨率從TL399切換至TL255。2008年3月開始,ECMWF基于VAREPS技術將中期集合預報與月尺度集合預報進行合并;在這以前,這兩個業務系統一直獨立運行。新合并系統針對短時效的小尺度和惡劣天氣事件,以及15 d的大尺度預報提供每天2次運行;而對于預報長度達到32 d的大尺度預報每周1次運行[18-19]。此外,從第10天開始,集合預報系統與動力海洋模式HOPE(Hamburg Ocean Primitive Equation)相耦合,同時引入1個每周1次運行的由5個集合成員組成的過去18年的集合預報回報套件。平均結果表明,使用這種新的組合系統,溫帶地區的月預報得分略高。特別是新系統能對極端事件產生更好的月尺度預測,如2003年歐洲熱浪或2007年英格蘭的潮濕夏季。然而,熱帶地區的月預報得分略低于以前的系統,很可能是因為在預報的前10 d缺乏海洋大氣耦合。2009年9月,ECMWF修正了隨機模式誤差方案。
2010年1月,ECMWF集合預報系統的預報階段模式水平分辨率在前10 d從TL319增加到TL639 (約35 km),從第10天到第32天的水平分辨率從TL255增加到TL319(約70 km)。2010年6月,ECMWF在集合預報系統中引入了一組由10個集合數據同化成員構成的新型初始擾動,并取代了演化SVs,效果表明基于集合數據同化的擾動能夠改善與資料同化循環相聯系的擾動刻畫,從而導致集合離散度提高,且在短期預報時效與熱帶地區的效果尤其明顯。2010年11月,刻畫模式誤差方面,ECMWF引入了第二種方案,即采用隨機動能后向散射方案SKEB方案[20](Stochastic Kinetic Energy Backscatter)來模擬次網格尺度能量升尺度轉換過程中存在的不確定性。2011年11月,ECMWF引入了新的海洋模式,即選用分辨率為1°(約100 km)的NEMO(the Nucleus for European Modelling of the Ocean)取代了HOPE模式,集合預報長度延長至32 d,并且每周開始運行2次(每周一和周四00時)。2012年6月,ECMWF對基于集合數據同化的擾動進行了改進,引入了近地面變量擾動,并且回報套件被擴大到涵蓋過去20年。2013年11月,初始擾動計算階段,模式垂直層數從62層增加到91層,集合預報階段與海洋模式耦合也從第10天移到了第0天,使得熱帶地區天氣現象預測效果取得重大進步,例如MJO(Madden-Julian Oscillation)現象。2015年5月,集合預報時間長度從32 d延長到46 d,回報套件擴大到每周2次 (每周一和周四00時)運行的涵蓋過去20年的11個成員集合預報。2016年3月,第1天至第15天,集合預報模式分辨率提高到了TCo639L91(立方八面體網格,約18 km),從第15天到第46天,模式分辨率增加到了TCo319L91(約36 km)。2016年11月,集合預報系統所使用的海洋模式分辨率從1°提高到0.25°(約25 km),垂直層數從42層增加到75層,并且引入了交互式海冰模式LIM2,使得海冰覆蓋能夠動態演變。同時針對SPPT方案中擾動傾向進行了全局修正,以改善全局動量、能量和濕度守恒特性。2017年7月,ECMWF改善了來自集合數據同化系統的濕度背景誤差方差,修正了背景誤差方差小波濾波,并為了改善熱帶氣旋結構改進了4DVAR中下投式探空儀風場觀測的質量控制。另外,預報模式采用了具有較低噪聲和更精確的新型高效長波輻射傳輸方案,對流方案也在較低溫度(低至-38 ℃)下增加過冷水。2018年6月,ECMWF在高分辨率(HRES 4d-Var)和集合數據同化分析表面分析中應用了海冰-大氣弱耦合同化,計算相對濕度增量采用溫度而不再使用虛擬溫度。同時為避免模式積分受到沖擊,模式誤差弱約束強制應用于每個時間步,而不是每個小時。模式誤差方面,SPPT方案再次做了修改,通過減少晴空區離散度、激活平流層傾向擾動,改進了“流相關”誤差表示,SPPT擾動模態的振幅減小(20%)。同時集合數據同化采用了與集合預報系統一樣的 SPPT方案,停用了隨機動能后向散射SKEB方案,從而節約了集合預報系統2.5%的計算成本。2019年6月,ECMWF系統采用連續數據同化,4D-Var外循環數量從3層增加到4層,集合數據同化成員也從25個增加到50個。集合數據同化離散度被應用于計算簡化擴展卡爾曼濾波的土壤分析雅可比矩陣;熱帶區域海面溫度也引入了弱耦合數據同化。改進了對流方案(夾卷、CAPE閉合、淺對流),考慮了輻射方案中的長波散射過程。集合預報系統基于50個集合數據同化成員生成初始擾動。集合預報系統的輻射時間步長從3 h減少到1 h,與HRES一致。
以上內容僅從業務配置升級方面簡要概括了歐洲業務集合預報的發展過程。本質上看,計算成本是驅動集合預報升級的關鍵因素。從1992年12月至2019年6月,預報階段主要變化包括:水平分辨率增加了20倍,從大約320 km增加到大約16 km;垂直分辨率幾乎增加了5倍,從19個垂直層增加到91個垂直層;預測時間從10 d延長到了46 d[21];集合成員個數從33個增加到51個;集合預報制作的頻率也有所增加,當前還開展集合預報回報業務。另外在將近27年的ECMWF配置升級時間軸上,還有一些值得重視的特點:
1)盡管ECMWF越來傾向基于集合數據同化開展集合預報,但SVs在未來幾年不太可能被移除。換言之,SVs一直貫穿ECMWF集合預報系統始終直到今天。在ECMWF全球集合預報第1個版本中,采用奇異向量模擬初始不確定性。奇異向量提供了一個非常嚴謹的理論基礎,直到2008年開始使用集合數據同化與奇異向量耦合[22]之前,奇異向量是ECMWF集合預報系統中唯一使用的初始擾動方法。即便到如今,SVs仍然是ECMWF集合預報系統的一個重要組成部分,因為它能不斷提供關于初始不確定性的動力相關信息。2008年添加了基于集合數據同化的擾動后,系統能夠改善與觀測系統特性(觀測誤差、覆蓋范圍、可擴展性)相關的初始誤差模擬,并自2008年開始,ECMWF 集合數據同化與SVs一直結合使用,以確定中期/月尺度集合預報的初始條件。
2)刻畫模式不確定性的方案選用主要以業務效果評估為基準。1999年,ECMWF以加拿大[23]為樣例,在集合預報中引入了一個旨在模擬模式不確定性的隨機方案SPPT方案[16]。2010年,ECMWF還引入了隨機動能反向散射方案SKEB方案來模擬模式無法解析的過程,即模擬從低于模式分辨率的尺度到模式可分辨尺度的升尺度能量轉移,該方案事后被證明不能帶來任何顯著的好處,于2018年關閉。可見ECMWF在系統應用新型理論方面不只做加法,也做減法,一切以業務效果檢驗為標準。
3)致力于中期、月尺度、季節內尺度和季節尺度集合預報的融合統一與無縫隙。通過使用可變分辨率方法[18-19]和降低超過中期集合預報的模式分辨率,ECMWF能夠生成預報長度更長、對集合性能影響最小的月尺度業務集合預報,即實現中期集合預報與月尺度集合預報合并。通過進一步降低分辨率,能夠生成業務使用的季節尺度集合預報[24]。同時由于提取延伸期的可預測信號非常困難,ECMWF對這些集合預報補充了集合預報回報套件,這些回報集合通常是較小成員規模的集合,其配置除了集合大小之外,其余均與過去幾十年生成的業務集合預報相同。值得記住的是,2006年中期集合預報延長至15 d,2008年集合預報加入月尺度集合預報并延長至32 d,2015年該預報時間進一步延長至46 d。
4)集合預報質量方面穩步提升。由于模式不斷升級、數據同化系統不斷改進、更多觀測數據被使用,以及上述集合預報系統配置的變化,ECMWF集合預報系統性能在過去27年中有了顯著提高。圖1是從1995年1月至2017年6月北半球500 hPa位勢高度集合預報技巧隨時間的演變[21]。通過集合預報與業務分析值進行比較,評價指標采用CRPSS度量,它是將集合預報的連續分級概率評分CRPS與參考預報(如氣候態)進行比較。對于完美預報而言,CRPSS的值為1,值越大,代表技巧越高;而對于只與氣候態統計預報具有相同技巧的預報,則CRPSS值為零。由圖1可知,對于刻畫自由大氣大尺度特征的500 hPa位勢高度,集合預報每10年提高約1.5 d。例如,2017年的5 d預報技巧(綠線)和2001年的3 d預報技巧(紅線)相當,表示在這16年期間,可預測性增加了約2 d。此外,圖1中每條曲線的波峰和波谷呈現出有規律的形態,主要是因為集合預報技巧與季節相關導致的,其中冬季天氣往往比夏季天氣更容易預報。

圖1 1995年1月—2017年6月北半球500 hPa位勢高度集合預報CRPSS隨時間的演變(參考數據為業務分析值,預報時間為24 h、72 h、120 h、168 h和240 h) Fig. 1 Time evolution, from 1 January 1995 to 1 June 2017, of the Continuous Ranked Probability Skill Score (CRPSS) of ENS forecasts of 500 hPa geopotential height over the northern hemisphere, for lead times of 24 h, 72 h, 120 h, 168 h and 240 h. Forecasts are verified against operational analyses
5)各關鍵特征的刷新周期不同。表1中的參數概括了ECMWF集合預報系統的主要特征,這些參數主要針對初始不確定性估計與模式不確定性估計及集合預報系統配置兩大類。從表1可知,ECMWF產生中期預報的集合預報系統,通常每年至少升級1次,與此不同,用于支撐月尺度或季節尺度的回報套件只是偶爾升級,間隔4~6 a,這種緩慢的刷新一部分是因為需要大量回報結果才能完成預報訂正,另一部分是為了向用戶提供長期而穩定的服務。此外,表中歸類的初始不確定性與模式不確定性估計及集合預報系統配置兩個階段,其技術研發與配置升級相互獨立。例如,刻畫初始不確定性時,垂直分辨率刷新頻率較快,從19層起,31層、40層、62層到91層,而水平分辨率,從T21提高到T42,不再變化;奇異向量計算優化間隔從36 h增加到48 h也不再變動;相反在集合預報階段,水平和垂直分辨率均根據需要及時刷新。還可發現初始擾動生成方面存在一條理論主線,即從純粹的初始奇異向量,再到初始奇異向量與演化奇異向量相結合,最終到奇異向量與集合資料同化相結合,即集合預報與資料同化一體化。
2 歐洲范圍內主要有限區域業務集合預報系統發展與概況
歐洲集合預報業務發展至今,在世界范圍內具有廣泛影響力。當前業務部門和預報員的注意力主要聚焦在歐洲中心中期或全球業務集合預報,其實早在1993年,針對潛在惡劣天氣的興趣,在已有的歐洲有限區域模式工作組EWGLAM(European Working Group on Limited Area Modelling)聯系基礎上成立了短期數值天氣預報工作組SRNWP(Short Range Numerical Weather Prediction)。且SRNWP項目從成立時起,就成了歐洲有限區域模式聯盟(短期數值天氣預報模式主要研發實體單位)相互之間進行合作的主要載體,并從2000年開始,該項目一直在歐洲氣象服務網EUMETNET(European Meteorological Services Network)領導下開展工作。這些數值天氣預報聯盟包括ALADIN (Aire Limitée Adaptation dynamique Développement InterNational)、COSMO(Consortium for Small-scale Modeling)、HIRLAM (High Resolution Limited Area Model)、LACE(Limited Area Modelling in Central Europe)項目和英國氣象局。同時鑒于有限區域高分辨集合預報對于提高災害性強天氣的預報準確率具有重要價值,以及探討歐洲業務集合預報框架的完整性,本節內容主要從業務角度梳理歐洲范圍內有限區域業務集合預報系統發展概況,下面分別從SRNWP-PEPS和SRNWP-EPS兩個項目以及歐洲主要有限區域業務集合預報系統展開。
2.1 SRNWP-PEPS 短期數值天氣預報“窮人”集合預報系統
在歐洲,區域模式早期研發主要由4個聯盟組織:HIRLAM、ALADIN、COSMO和英國氣象局,而每個聯盟都有自己的有限區域模式,這些模式都是當今短期數值天氣預報領域的最新技術代表,已被20多個國家氣象服務機構用于業務預報。因此,客觀存在使用不同模式參數化、不同資料同化技術和不同網格分辨率以及不同區域的多種業務預報,并且這些預報結果都是合理的,這就給預報員帶來了巨大挑戰,即如何有效利用現有各種業務數值天氣預報結果。
2002年,德國氣象局產生了將所有可用高分辨率數值預報收集起來開展“窮人”集合預報的想法,理論上可以將來自不同聯盟的區域模式短期預報融合成一個在預報預警過程中效果更優的多模式集合預報。因此在歐洲氣象服務網理事會會議上,建議在歐洲氣象服務網的框架下啟動SRNWP-PEPS[25]工程,其主要目標之一就是對“窮人”集合預報進行評估,以確定它能否為預報預警提供重要支撐和改進。2003年6月,歐洲氣象服務網SRNWP項目主任Quiby邀請歐洲國家的氣象局參加,并啟動了該計劃。2004年底,德國氣象局建立了SRNWP-PEPS業務,包括累積總降水量、累積總降雪、最大10 m風速、最大10 m陣風速度、最高和最低2 m溫度,一天四次(00,06,12和18時) 。到2006年,20多個氣象服務部門(表略)已經加入了該計劃,最終40個確定性和概率預報產品被分發給各貢獻成員。
SRNWP-PEPS的主要處理方法是將單個模式預報直接插值到一個參考網格上,即PEPS網格,間距為0.0625°(約7 km),與德國氣象局模式范圍接近,覆蓋歐洲(30°W—30°E,35°N—70°N)區域,見圖2。在每個PEPS網格點上,針對集合成員使用最近鄰方法計算超過某一閾值的概率。由于每個預報成員具有不同的分辨率和積分區域,所以開展“窮人”集合預報時,成員個數多少取決于網格點位置。如圖2所示,不同顏色代表成員個數不同。此外,集合大小還隨預報變量而變化(表略),因為不是每個模式都提供每個預報變量。例如,只有一些ALADIN和COSMO聯盟國家在其模式環境中考慮了陣風經驗參數模型。
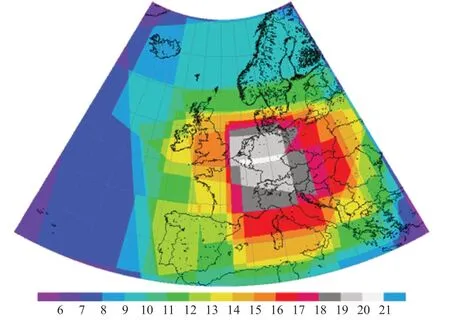
圖2 SRNWP-PEPS格點的最大集合成員個數隨空間的分布 Fig. 2 The spatial distribution of the maximum ensemble size of the SRNWP-PEPS
SRNWP-PEPS的缺點在于其概率預報估計存在偏差,可能是因為每個聯盟內部的預報成員聚類,以及仍然存在一些不確定性源還未考慮,但經過集合后處理生成SRNWP-PEPS訂正后的概率預報,可以作為歐洲其他集合系統的參考。另外,不能忽略提供集合預報成員的有限區域模式運行狀態,否則“窮人”集合預報系統可能不完整。
2.2 SRNWP-EPS 短期數值天氣預報集合預報系統
SRNWP-EPS是在EUMETNET框架下的一個項目,由于該項目任務的復雜與艱巨性,它主要分為兩個階段。第一個階段是從2013年1月至2014年6月,該階段由西班牙氣象廳Estrada領導,其核心目的是實現2 km左右網格尺度的惡劣與高影響天氣短期集合預報開發與應用在歐洲范圍內最大限度地協作。主要完成任務:盡可能確定目前所擁有的項目相關狀況和經驗;計劃使用SRNWP-I和SRNWP-V項目成果,以實現集合預報產品的互操作性和驗證;為后面設計對流可允許尺度的集合預報系統籌劃科學和技術實驗;考慮最合適的初始擾動生成方法及其集合離散度、模型誤差和大尺度邊界不確定性以及可用的嵌套技術;滿足所有相關合作伙伴要求,提供一個適用于不同氣象中心的系統,使得高影響天氣預報得到顯著改善;分析和評估針對甚高分辨率集合預報的有限區域模式集合預報的科學方法發展現狀,包括技術限制與弱點;可用和將來的計算機資源場景;為主要最終用戶考慮必要的產品;為歐洲氣象服務網咨詢委員會提交一份SRNWP-EPS第二階段提案。項目第二階段從2015年7月—2017年12月,但最后延至2018年12月結束。該階段由西班牙和意大利協調,其主要目的是幫助在歐洲建立甚高分辨率的集合預報系統,解決對流允許尺度的天氣現象預報。主要完成任務:開發經訂正后的集合預報新產品和新方法,用于雷暴、霧的極端預報和概率預報;針對極端事件(風、降水、溫度等要素)進行集合訂正;理解集合預報系統對土壤條件和邊界層方案的敏感性及其對選定現象(霧和雷暴)預報的影響。從項目執行看,項目第二階段主要聚焦高影響天氣預報對象雷暴與霧,研究主要聚焦不同歐洲模式系統對土壤模型和邊界層方案的描述不確定性,參與方目前主要有德國、匈牙利、意大利、挪威、波蘭、西班牙、英國等21個歐洲氣象服務網成員國。預計該項目將作為數值天氣預報協作框架下SRNWP-EPS模塊進行第三階段工作,即從2023年1月1日—12月31日。
2.3 歐洲范圍內主要有限區域業務集合預報系統發展概況
由于局地天氣存在很大不確定性,因此歐洲很多國家都研發了有限區域集合預報系統,下面將對主要的代表性區域集合預報簡要討論,各高分辨區域集合業務系統的業務配置如表2所示,系統參數統計截止到2018年11月。
英國氣象局:2005年,首次引入了一個短期區域集合預報系統,以改善對可能影響英國的高影響天氣預報水平[26]。該系統被命名為英國氣象局全球和區域集合預報系統MOGREPS (Met Office Global and Regional Ensemble Prediction System),它主要用于幫助預報風暴的快速發展、風、雨、雪和霧等天氣現象。它包括一個覆蓋北大西洋和歐洲的區域集合預報系統(稱為MOGREPS-R)和一個為其提供側邊界條件的全球集合預報系統,稱為MOGREPS-G。2012年7月,英國氣象局推出了一個對流允許集合預報系統,其網格間距為2.2 km,嵌套在18 km網格的MOGRES-R系統中,預報長度為36 h,由一個控制預報和11個擾動成員組成,稱為MOGRES-UK。2012年,它被首先用于為倫敦奧運會提供概率預報[27]。2013年1月,MOGREPS-G系統水平分辨率從60 km升級到33 km,這使得英國MOGRES-UK對流允許集合預報系統能夠直接嵌套在MOGREPS-G全球集合預報系統中,而不需要中間的區域集合預報系統MOGRES-R[28]。截至2018年11月,該系統水平格距為2.2 km,垂直層達到70層,逐小時預報,預報長度54 h,集合成員24個。2019年3月,英國氣象局對其業務運行的對流尺度集合預報系統 MOGREPS-UK進行了升級,它將每6 h進行一次預報,更新為每1 h進行一次預報,預報長度增加到120 h。
德國:基于二十面體非靜力模式ICON(Icosahedral Nonhydrostatic),在ICON-EPS全球集合預報系統 (40 km)與ICON-EU-EPS區域集合預報系統(20 km)雙向嵌套基礎上,于2012年5月實施了一個2.8 km的對流允許尺度集合預報系統COSMO-DE-EPS,它嵌套在區域集合預報系統內,初始條件擾動來自區域集合預報的LETKF系統,由20個成員組成,每天運行8次,持續到21 h[29]。截至2018年11月,水平分辨率升級到2.2 km,預報長度增加到27 h。
法國氣象局:基于2.5 km AROME模式,開發了一個對流允許尺度集合預報系統,稱為PEARO(Prévision d’Ensemble AROME)系統,它嵌套在ARPEGE-EPS中,即法國全球短期集合預報系統PEARP(Prévision d’Ensemble ARPEGE)。PEARO系統2016年已經完成試驗運行,并且自2016年10月中旬以來,每天業務運行兩次,共有12個集合成員,其初始擾動來自于Arome-EDA系統。截至2018年11月,每天業務運行4次,其中在03時/15時起報的任務預報長度45 h,在09時/21時起報的任務預報長度為51 h。
奧地利:2007年3月,在ALADIN國際合作和中歐有限區域建模區域合作RC LACE(Regional Cooperation for Limited-Area modelling in Central Europe)框架內開發了中歐有限區域集合預報系統ALADIN-LAEF(Aire Limit′ee Adaptation Dynamique D’eveloppement InterNational-Limited-Area Ensemble Forecasting),并正式投入準業務運行。它的主要特征是通過ECMWF全球集合預報動力降尺度。2009年,ALADIN-LAEF系統升級多種處理預報不確定性的方法,以提高預報質量[30]。其初始擾動是通過混合方法[31]將ECMWF奇異向量產生的大尺度擾動與用ALADIN模式培育產生的小尺度擾動相結合得到,水平分辨率為18 km,垂直方向37層,預報長度54 h,由18個成員構成。截至2018年11月,水平分辨率升至11 km,垂直方向45層,預報長度延長至72 h。
當前甚高分辨率集合預報的研究和開發正在歐洲許多國家進行,已經成為集合預報研究的前沿與熱點。作者認為,它應該成為除全球中期集合預報研究外的另一個焦點。歐洲其余國家的現狀不再詳述,其相關參數見表2所示。
總體而言,與歐洲全球集合預報相比,有限區域高分辨率集合預報有如下特點:1)集合預報系統的水平分辨率較高,除挪威(12 km)、奧地利(11 km)、匈牙利(8 km)和意大利(7 km)之外,其余國家均達到了5 km以下,大部分集中在2~3 km。2)有限區域高分辨率集合預報成員個數一般比全球中期集合預報的成員個數少。3)邊界更新時間間隔均低于6 h,大部分達到逐3 h或逐1 h更新邊界條件。4)集合預報的時間長度均比全球中期集合預報長度小,一般不超過72 h。5)初始擾動生成方面,挪威采用集合資料同化擾動加ECMWF全球集合預報的初始奇異向量擾動相結合,西班牙采用多個全球模式降尺度,奧地利采用奇異向量與區域模式增長模培育矢量相混合并結合陸面過程集合分析,匈牙利采用PEARP全球集合預報系統的奇異向量,英國采用高分辨率分析值疊加降尺度擾動,瑞士和意大利采用LETKF算法生成初始擾動,德國采用區域集合預報LETKF系統擾動得到初值,波蘭通過時間滯后的確定性預報擾動土壤參數得到。不難發現,在高分辨率集合預報理論方面,初始擾動存在與全球中期集合預報初值理論切割的傾向,但目前還沒出現一種公認的專門適合對流可分辨尺度集合預報的初值集合預報理論,因此各個國家在結合自身業務實際的基礎上,集合預報理論與形式多種多樣。
3 仍存在問題、挑戰及未來方向
集合預報是歐洲業務預報的主流。當前它不僅廣泛用于氣象部門,還應用于水文學領域、能源部門和航空部門[32-33]等。截至目前,歐洲不但致力于全球集合預報的理論與應用不斷向下迭代,其有限區域模式高分辨集合預報的研究與實踐也在近十幾年取得了豐碩的成果。本文從業務配置的角度簡要探討了歐洲業務集合預報的發展,旨在為集合預報理論探索和業務實踐提供參考與借鑒。
總體而言,對于歐洲全球業務集合預報的發展,存在下面三個趨勢[34]:
1)歐洲全球集合預報逐步走向地球系統建模與同化。例如,全球集合預報系統在升級過程中考慮了與海洋模式和海冰模式耦合以及耦合資料同化,集合預報效果得到顯著改進。這些升級表明,通過增加相關的地球系統相互作用過程,可以進一步提高現有預報的質量,還可以進一步延伸動力預報的預報技巧天數。
2)ECMWF致力于在制作分析值、中期集合預報、次季節尺度集合預報和季節尺度集合預報業務的設計與配置升級過程中走向無縫連接。這種趨勢一方面因科學發展推動,另一方面因為技術要求推動。從科學角度看,有證據表明與延伸期預報相關的過程也與短期預報相關。例如,在ECMWF集合預報中加入了海洋動力模式,使用海洋—陸地—大氣耦合模型來計算季節和月時間尺度,發現它有助于提高集合預報的可靠性和準確性,ECMWF自然也將它引入到中期集合預報中。從技術角度來看,從第0天到第1年,在分析和預報階段使用相同模式的開展集合預報,便于維護和業務升級。
3)全球業務集合預報向更高分辨率方向移動。這個問題源于需要更好解決較小尺度的天氣預報問題以及相鄰尺度之間的相互作用,其前提是增加計算資源。2016年ECMWF通過十年戰略設定了許多宏偉目標,其中包括到2025年引入一個全球5 km的集合預報。并且ECMWF最終將丟棄高分辨確定性預報,而只專注于達到1 km左右的高分辨集合預報[34],目前法國氣象局也采用了這一戰略。
上述關于歐洲全球集合預報發展的三個方面盡管路線清晰,但目前的發展水平僅僅才是開始,還存在許多尚未解決的科學與工程技術問題,需要大氣科學及相關交叉學科厚重的基礎研究支撐。
對于有限區域甚高分辨率集合預報,目前歐洲各個國家所建設的高分辨率集合預報業務相比ECMWF中期集合預報均有相當的優勢,但理論方面仍未形成有效突破,部分做法仍未完全擺脫中期集合預報的理論框架。當前SRNWP-EPS項目第二階段任務業已完成,主要解決土壤模型和邊界層方案的不確定性,預計將開展第三階段工作,主要目標可能致力于對流允許或對流可分辨尺度集合預報的理論突破與業務應用,值得密切關注。
需要說明的是,本文并不是一個關于歐洲業務集合預報進展及應用研究的完全性綜述。許多十分重要的方面,如歐洲各個國家甚高分辨或對流允許/可分辨尺度集合預報沿革和集合預報水平、季節內和季節尺度集合預報進展,以及它們與ECMWF全球集合預報對比等均未有涉及。我們相信,集合預報未來將綻放更多的光彩。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
 Advances in Meteorological Science and Technology2020年2期
Advances in Meteorological Science and Technology2020年2期
- Advances in Meteorological Science and Technology的其它文章
- 主編語
- 氣象部門政府購買人才服務需求探討
- 新時代氣象科普工作的定位與可持續發展路徑研究
- 淺析氣象繼續教育教案的編寫
- 冠層垂直變化的高分辨率激光觀測
- AMS詞匯