某UUV裝備電機典型故障分析及排除
2020-06-02 15:27:53譚善文
裝備維修技術 2020年24期
關鍵詞:故障排除
摘 要:介紹某UUV(無人水下航行器)裝備收放電機和槽道電機的結構原理,結合修理實際對兩型電機的典型故障進行分析及排除,保證收放電機和槽道電機正常工作,提高該裝備的修理效率。
關鍵詞:收放電機;槽道電機;故障排除;UUV
引言
收放電機和槽道電機是某UUV裝備的重要組部件,它們工作性能的優劣直接關系某UUV裝備任務的實現,該裝備保障過程中經常出現收放電機和槽道電機的故障,影響該裝備的修理效率。因此,梳理分析收放電機和槽道電機典型故障,總結修理經驗,對快速定位及排除故障、提高該裝備的修理效率有著積極的實際意義。
1? 收放電機結構原理
收放電機是收放裝置的動力單元,由永磁電機和減速器組成,電機輸出軸通過彈性連軸器與絞轂連接,輸出軸進行正反轉時,帶動絞轂同步進行正反轉,實現校準源信標電纜的釋放與回收。
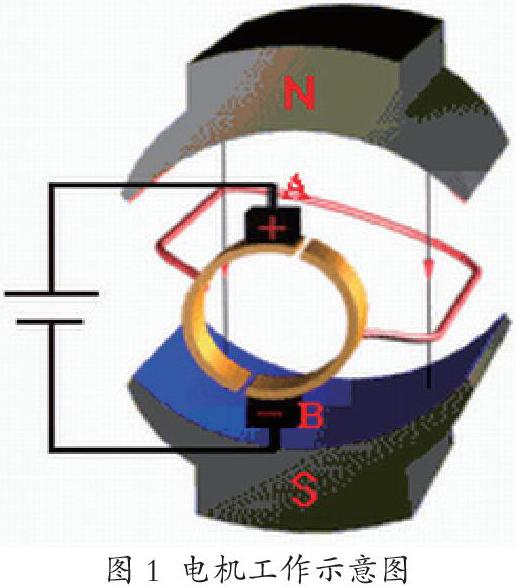
收放電機是直流永磁有刷電機,電刷A連接直流電源的正極的一端,電刷B連接直流電源的負極的一端,如圖1所示。
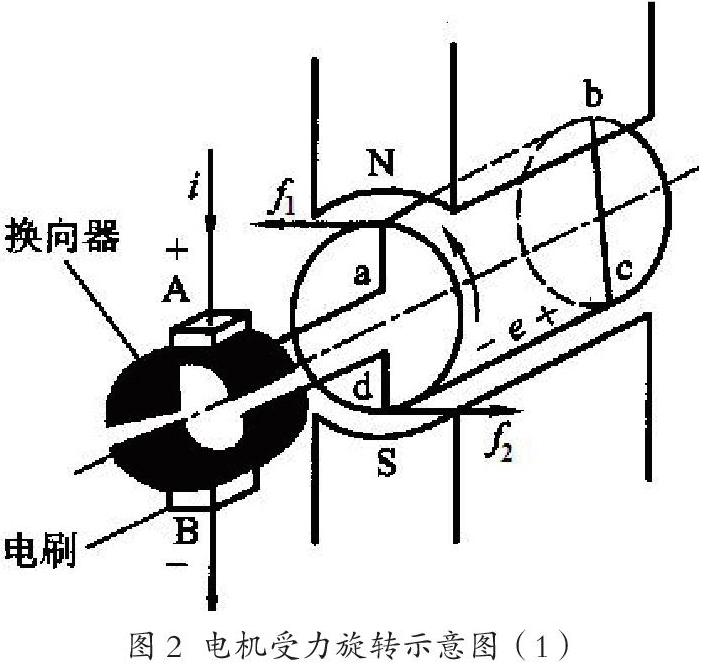
當電樞線圈中有電流流過時,受磁場作用,導體ab受力為f1,導體cd受力為f2,故整個電樞線圈形成逆時針方向的電磁轉矩,當電磁轉矩大于阻轉矩時,電機轉子逆時針旋轉,如圖2所示。
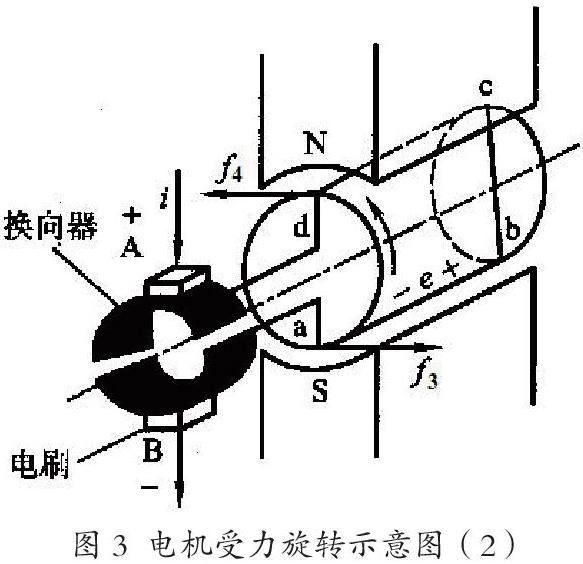
當電樞線圈旋轉到圖3所示位置時,導體ab旋轉到S極端,受力為f3,導體cd旋轉到N極端,受力為f4。此時電樞線圈的電磁轉矩仍是逆時針方向,線圈在該電磁轉矩作用下繼續逆時針旋轉。
實際直流電動機的電樞并非單一線圈,磁極也并非只有一對,而是根據實際需要有多個線圈。線圈分布在電樞鐵心表面的不同位置,按照一定的規律連接起來,構成電機的電樞繞組[1]。磁極也是根據需要N、S極交替旋轉多對。
收放電機定子與轉子如圖4、圖5所示。
2? 收放電機典型故障分析及排除
2.1? 收放電機堵轉電流偏小
海軍標要求收放電機的堵轉電流≥8.5A,但在修理過程中,發現某收放電機堵轉電流偏小,最大只有5.87A,不符合技術要求。經測量正常收放電機的內阻約為0.61Ω,而該收放電機的內阻達到為1.22Ω左右,高于正常內阻范圍,初步判斷為電機繞組內阻偏大造成。電機堵轉時,所有電能都只轉化為線圈的熱能,電機的工作電壓為7.2V,正常內阻為0.61Ω左右,故正常時理論堵轉電流可達7.2/0.61=11.8A。同理,可計算出該故障收放電機的理論堵轉電流為7.2/1.22=5.90A,與實測值吻合。接著,經過細心排查,發現電機轉子換向片與線圈的壓接處,有一端松開,壓接牢靠后重新檢測,堵轉電流為8.96A,符合技術要求,故障排除。
2.2? 收放電機釋放回收電流偏大
某收放電機空載時釋放平均電流≥5.6A、回收平均電流≥7.2A,而海軍標要求為空載時收放平均電流≤1.5A。剛開始,技術人員以為是電機裝配不到位影響了電機運轉,造成空載收放電流過高。但重新分解裝配后,故障依舊。接著,懷疑是否為電機驅動裝置有故障,驅動電壓過大造成。經測量,電機工作電壓為7.2V,正常。最后,經多方查閱資料了解到,對于未安裝換向極的小容量直流電機,常常采用移動電刷位置的方法來改善換向,就是將電刷從幾何中心線上移開一個適當的角度,使換向元件產生的切割電勢的方向與自感電勢的方向相反,相互抵消,以達到改善換向的目的。果然,把電刷從幾何中心線上移開適當角度后,重新檢測,電機空載時釋放平均電流0.8A左右、回收平均電流1.1A左右,符合技術要求,故障排除。但需要注意的是,永磁體定子與電刷的相對位置不能顛倒,否則會造成電機轉向顛倒,從而導致收放電機釋放與回收方向顛倒。
3? 槽道電機結構原理
槽道電機作用是提供航行器上浮下潛或在水下懸停定位時需要的垂向推力,使航行器快速下潛或懸停于水下某一深度,保證校準源信標浮于水面,確保校準源信號的接收性能。槽道電機屬于無刷直流電動機,其結構如圖6所示。它主要由電動機本體、電子開關線路和位置傳感器三部分組成[2]。當電樞繞組的某一相通電時,該電流與轉子磁極所產生的磁場相互作用而產生的轉矩,驅動轉子旋轉,控制電路根據位置傳感器測定的電機轉子位置有序的觸發驅動電路進行有序換相,以驅動直流電動機[3]。
槽道電機的位置傳感器為霍爾傳感器,其作用是測定直流無刷電動機轉子磁極位置,實時為電子開關線路反饋對應的換相信息,將轉子磁極的位置信息轉換為電信號,然后去控制電樞繞組換相,如圖7所示。
無刷直流電機驅動電路有半橋驅動和全橋驅動,全橋驅動又可分為星形(Y)聯結和三角形(△)聯結,通電方式有兩兩通電、三三通電等。如圖8所示,槽道電機控制電路采用的是三相星形(Y)聯結全控橋式電路,通電方式采用的是兩兩通電的方式。每個時刻均有2個功率管導通,間隔60°電角度換相1次,每次換相1個功率管,每個功率管導通120°電角度,各功率管的導通順序是T1T2、T2T3、T3T4、T4T5、T5T6、T6T1、…。
4? 槽道電機典型故障分析及排除
4.1? 槽道電機正轉方向正常,轉速過高,反轉不啟動
修理過程中,發現某槽道電機正轉方向正常,轉速過高,反轉不啟動。首先,用一個正常的槽道電機替代原電機,電機運轉正常,故障可定位在槽道電機上;接著經過仔細排查,確認供電相序正確;最后調整霍爾傳感器位置,發現霍爾傳感器安裝位置不同,電機運轉狀態也不同,調整霍爾傳感器到適當位置,電機運轉正常,故障排除。
4.2? 槽道電機正反轉運轉異常,有顯明抖動現象
修理過程中,發現某槽道電機正反轉運轉異常,有顯明抖動現象。首先,用一個正常的槽道電機替代原槽道電機,電機運轉正常,可定位為槽道電機故障;接著調整霍爾傳感器位置,故障仍舊;最后查閱資料得知槽道電機屬于直流無刷三相電機,采用兩兩通電方式進行電子換向。經仔細排查,發現供電相序接線不正確,按正確接線重新焊接,電機運轉正常,故障排除。
5? 結語
本文簡要介紹了某UUV裝備收放電機和槽道電機的結構原理,總結了收放電機和槽道電機典型故障的修理經驗,對快速定位及排除故障、提高該裝備的修理效率起到了積極作用,同時也為同行修理保障提供參考和借鑒。
參考文獻:
[1]顧繩谷.電機及拖動基礎.上冊[M].4版.北京:機械工業出版社,2004.
[2]張琛.直流無刷電動機原理及應用[M].北京:機械工業出版社,2004.
[3]牛海清,謝運祥.無刷直流電動機及其控制技術的發展[J].微電機,2002(5):36-38.
作者簡介:
譚善文(1986-),男,漢族,廣東廣州,本科,工程師,黃埔軍械修理廠軍械裝備分廠,從事水中兵器修理相關工作。
(中國人民解放軍第四八零一工廠黃埔軍械修理廠,廣東 廣州 510715)
猜你喜歡
中國科技博覽(2016年24期)2016-12-28 20:41:00
電子技術與軟件工程(2016年18期)2016-11-14 02:07:15
農機使用與維修(2016年10期)2016-11-10 09:42:39
農機使用與維修(2016年10期)2016-11-10 09:40:20
農機使用與維修(2016年10期)2016-11-10 09:33:04
中國科技博覽(2016年19期)2016-10-19 13:06:01
科學與財富(2016年28期)2016-10-14 20:50:37
科技視界(2016年15期)2016-06-30 16:26:38
科技視界(2016年10期)2016-04-26 11:29:18
科技視界(2016年7期)2016-04-01 08:34:50
