導引頭伺服系統的自抗擾控制
2020-05-18 02:36:12朱海榮張先進
兵器裝備工程學報 2020年4期
朱海榮,吳 瑜,張先進,李 奇
(1.江蘇工程職業技術學院 機電學院, 江蘇 南通 226007; 2.東南大學 自動化學院, 南京 210096)
導引頭伺服系統受到機械諧振、軸系耦合、非線性摩擦、線纜約束等多種干擾的影響,怎樣 通過“伺服控制”的設計提高導引頭伺服系統的抗干擾能力和控制性能,受到越來越多控制界學者的關注與重視[1-2]。針對導引頭穩定平臺存在不確定彈體角速度干擾以及非線性摩擦干擾的問題,雷虎民等結合滑模控制和非線性干擾觀測器理論,提出一種基于非線性干擾觀測器的二階滑模控制方法,提高了穩定平臺的魯棒性和跟蹤精度[3];針對相控陣導引頭中波束指向受彈體擾動影響的問題,蔣兵兵等設計了基于環路濾波的捷聯解耦方法,計算機仿真與半實物系統實測結果驗證了所提解耦方法的正確性及有效性[4];為了提高導引頭穩定平臺抗擾性及速度穩態跟蹤性能,張明月等提出了一種基于擴張狀態觀測器的雙積分滑模控制器,實驗證明了基于擴張狀態觀測器的雙積分滑模控制器對導引頭穩定平臺具有較強的抗擾性和較好的跟蹤性能[5]。
自抗擾控制(active disturbance rejection controller, ADRC)的優勢是不依賴系統的精確模型信息作為先驗知識,并且可以實現系統狀態和總擾動的同步估計。由于有較高的實用性,ADRC在永磁同步電機控制[6-8]、光電穩定平臺控制[9-10]以及其他相關領域得到了廣泛的應用[11-12]。文獻[13]采用ADRC對導引頭內外部擾動進行總體估計并給予相應補償,使得導引頭視軸的振動得以大幅隔離,從而實現視軸的相對穩定及高精度控制。為了減小非線性摩擦力矩、線纜約束以及模型失配等干擾對導引頭伺服系統(seeker servo system,SSS)的影響,設計了SSS的自抗擾控制器,利用擴張狀態觀測器(extended state observer,ESO)來觀測系統建模誤差和外部干擾力矩,從而提高SSS的抗擾動能力。
1 系統數學模型
1.1 系統工作原理
導引頭結構示意圖如圖1,目標跟蹤器安裝于萬向支架上,采用陀螺穩定系統隔離彈體擾動,其工作原理為:目標跟蹤器在導彈飛行中發現并捕獲目標,計算出目標距視軸的位置偏差,把該偏差作為伺服系統的輸入信號,由力矩電機驅動萬向支架旋轉,從而帶動萬向支架上的目標跟蹤器指向目標,直至誤差為零,此時由彈體姿態變化產生的擾動角速度被抵消。
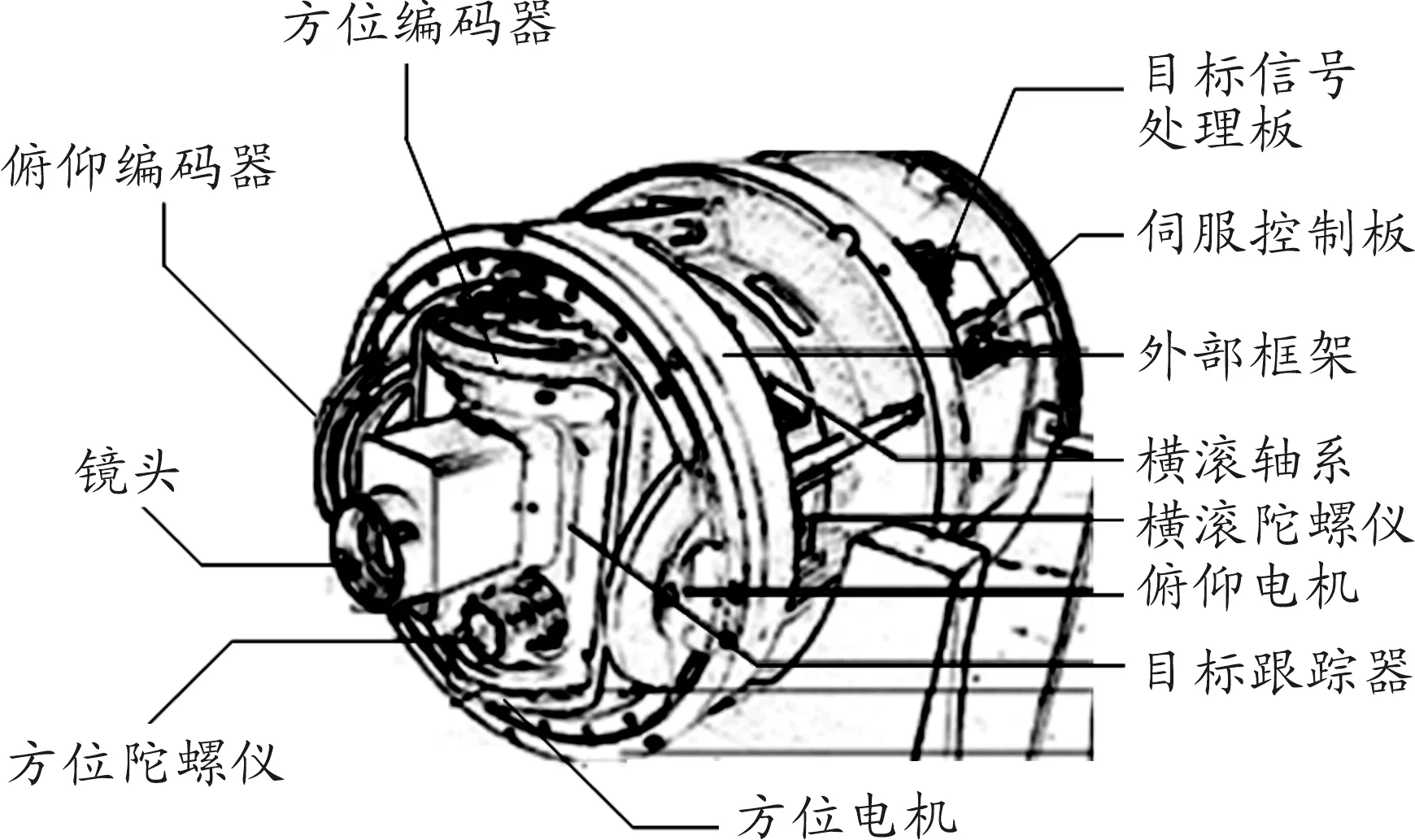
圖1 導引頭結構示意圖
1.2 系統數學模型
導引頭伺服系統采用了直流力矩電機直接驅動的方式進行控制,以消除齒輪間隙等非線性因素帶來的影響、提高傳動精度,使系統具有較大的力矩系數。
以俯仰軸為例,其動力學方程如式(1):
(1)
其中:J為俯仰支撐軸系的轉動慣量之和;θp為俯仰支撐軸系旋轉角度;TM為俯仰軸直流力矩電機的輸出轉矩;T∑為俯仰軸電機所承受的擾動力矩,主要包括:軸系摩擦、導線彎曲引起的擾性力矩等。
對式(1)進行拉普拉斯變換,得到式(2):
(2)
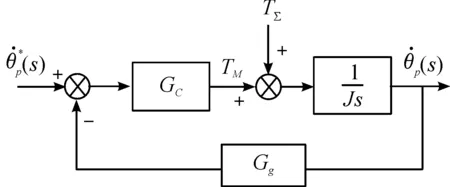
圖2 俯仰軸控制框圖
由圖2可得:
(3)
根據電機原理,得到俯仰軸電機的電壓平衡方程為:

(4)
其中:u為電樞控制電壓;i為電樞電流;Ke為反電勢系數;L為電樞回路電感;R為電樞回路電阻。
根據電機原理,得到俯仰軸電機的電磁轉矩方程為:
(5)
其中:B=Bm+BL,Bm和BL分別為電機和負載的粘性阻尼系數;Km為電機的力矩系數。
2 自抗擾控制器設計
存在非線性系統:
(6)

ADRC由跟蹤微分器(tracking differentiator,TD)、擴張狀態觀測器和非線性誤差反饋控制律(nonlinear state error feedback law,NLSEFL)組成。所設計的自抗擾控制器結構框圖如圖3。
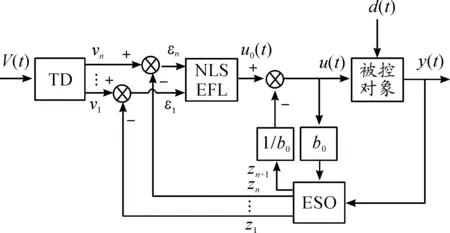
圖3 自抗擾控制器結構框圖
其中V(t)為系統參考輸入,v1,…,vn為V(t)的跟蹤信號及其各階導數的跟蹤信號;z1,…,zn為ESO對被控對象的狀態估計,zn+1為ESO對系統總擾動的估計,ε1…,εn為誤差,d(t)為廣義擾動。利用TD和ESO對應輸出量之間的誤差,采用適當的NLSEFL,即可以得到控制量u0(t)。
設計TD如式(7)所示:
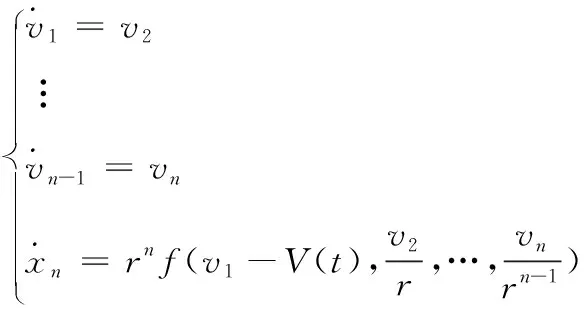
(7)
其中r為一個大于零的可調參數,通過選取適當的函數f(v1,v2,…,vn),便可以得到:
(8)
設計ESO如式(9):
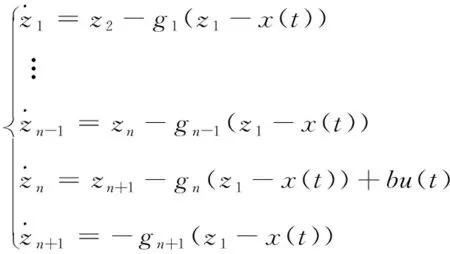
(9)
z1(t)→x(t),…,zn(t)→x(n-1)(t),zn+1→a(t)
(10)
上述ADRC設計中,由TD可以得到輸入信號V(t)及其各階導數的估計量v1,v2,…,vn;由ESO可以得到系統狀態的估計量z1,z2,…,zn。定義廣義誤差為:
ε1=v1-z1,ε1=v2-z2,…,εn=vn-zn
(11)
對上述廣義誤差進行非線性組合,即可實現非線性狀態誤差反饋控制器,其形式如式(12)所示:
u0=β1fal(ε1,α,δ)+…+βnfal(εn,α,δ)
(12)
其中β1,…,βn為可調參數,fal函數如式(13):
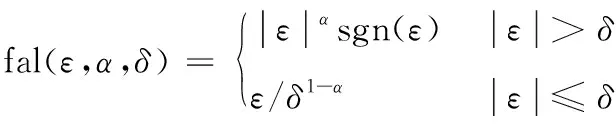
(13)
利用廣義誤差的非線性組合以及模型與外部擾動的補償,可以得到如式(14)的最終控制量u(t):
在幼果膨大期,鈣、硼等中微量元素的補充對于提高棗果的品質相當重要。鈣肥易在土壤中固定,通過葉面補充能夠大幅提高利用率。鈣元素是細胞壁的組成成分,能夠增加果實表皮的韌性。同時,足夠的鈣元素有利于體內物質代謝和運轉。鈣元素能夠促進果實質量、硬度及風味的增加,減少裂果及果面灼傷。一般在冬棗幼果期,每隔10 d噴施一次葉面鈣肥,可以使用翠康鈣寶500~800倍液。
u(t)=u0(t)-zn+1(t)/b
(14)
其中-zn+1(t)/b部分起擾動補償作用。
3 導引頭伺服系統ADRC設計
由于控制量式(14)對擾動進行了補償,故可將系統(6)的控制問題近似退化為一個n階積分串聯型系統的控制問題、使用線性比例函數來設計NLSEFL,簡化ESO的結構。
由于電機的粘性阻尼系數B很小,為了分析方便,可以把電機轉矩方程(5)中的Bdθp/dt項看成系統擾動的一部分,從而把式(5)變化成式(15)的形式:
(15)
其中T∑′包含了各種擾動,把式(15)改寫成式(16)的形式:
(16)
根據設計需要,進一步把式(16)寫成式(17)的形式:
(17)
其中a(t)為總擾動,a(t)=-T∑/J+(b-b0)i,b0是b的標稱值(b=Km/J)。電機轉軸上各種擾動力矩的過補償、欠補償以及由于b0估計誤差所造成的擾動均可在a(t)中反映出來。導引頭伺服單元ADRC結構如圖4。
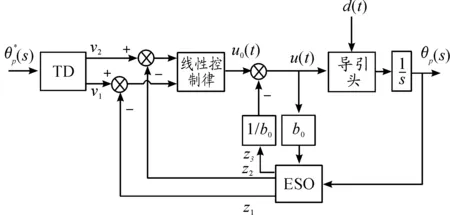
圖4 導引頭ADRC結構框圖
導引頭伺服單元ADRC中的幾部分設計如下:
1) 跟蹤微分器
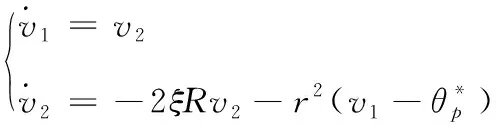
(18)

2) 擴張狀態觀測器
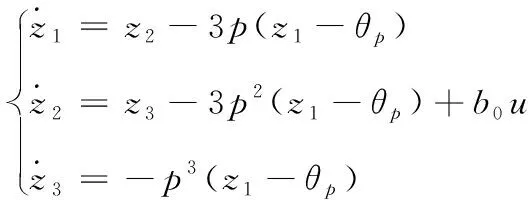
(19)
其中:θp為俯仰電機的實際轉速;z1為對實際位置的估計;z2為對實際位置微分的估計;z3為對未知擾動的估計,-p為ESO期望的閉環極點(p>0)。
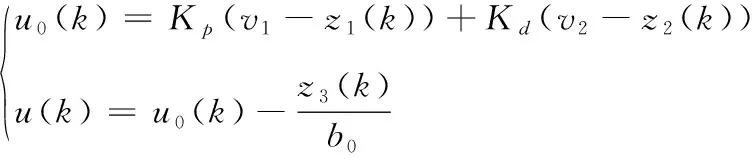
3) 線性控制律

(20)
其中Kp和Kd分別為比例和微分增益,兩者均大于零。陳增強等在文獻[14]對ADRC的穩定性做了詳細的分析,此處不再贅述。
4 實驗研究
4.1 實驗裝置
電視導引頭實物如圖5所示,導引頭內部有兩塊DSP芯片,一塊完成目標識別和目標位置處理;另一塊完成伺服控制。
伺服控制板采用DSP+FPGA作為處理器,可接收目標位置脫靶量信號,也可接收控制站給出的控制指令,根據具體的工作模式計算出電機的控制量,以PWM方式控制各個軸系的電機運動,實現對跟蹤器視軸的控制。

圖5 導引頭實物照片
4.2 算法設計
選用J75LYX01型分裝式永磁直流力矩電機作為俯仰軸電機,電機參數如表1所示。

表1 俯仰軸電機參數
式(19)所示ESO經離散化后得到:
z1(k)=z1(k-1)+T(z2(k-1)-
3p(z1(k-1)-θl(k-1)))
z2(k)=z2(k-1)+T(z3(k-1)-3p2·
(z1(k-1)-θl(k-1))+b0u(k-1))
z3(k)=z3(k-1)-Tp3(z1(k-1)-
θl(k-1))
(21)
式(20)所示線性控制率經離散化后得到:
(22)
4.3 實驗對比
分別采用自適應PI控制和ADRC控制在圖5所示平臺進行實驗對比。為了比較的公平性,把兩個控制器的參數均調至最佳, 其中ADRC控制器參數為:kp=600,kd=50,b0=305,ESO極點-p=-2 500。下列實驗均采集了第200~2 000個數據,每8 ms保存一個數據。
實驗一:在彈體靜止條件下給定幅值為5°的正弦跟蹤指令信號,自適應PI控制和ADRC控制的實驗效果分別如圖6所示(分別為角度誤差角速度誤差)。在該實驗條件下,自適應PI控制和ADRC控制均取得了較好的控制效果,滿足誤差<0.02°的設計要求;ADRC控制能有效抑制非線性摩擦和系統模型失配等未知干擾,所以控制效果更佳,跟蹤誤差在0.01°以內。
實驗二:在模擬跟蹤目標靜止的情形下,加上1°/0.2 Hz的模擬彈體運動信號,實驗效果分別如圖7所示(分別為角度誤差角速度誤差)。在該實驗條件下,由于模擬彈體運動的幅度和頻率都較小,對系統影響也比較小。采用自適應PI控制時的最大跟蹤角度誤差在0.3°以內,尚能較好地跟蹤“靜止”目標;采用ADRC控制時的最大跟蹤角度誤差在0.12°以內,控制效果更佳。
實驗三:在模擬跟蹤目標靜止的情形下,加上10°/1 Hz的模擬彈體運動信號,自適應PI控制和ADRC控制的實驗效果分別如圖8所示(分別為角度誤差角速度誤差)。在該實驗條件下,由于模擬彈體運動的幅度和頻率較大,對系統影響較大。采用自適應PI控制時的跟蹤誤差大于2°,已經不能滿足設計指標的要求;采用ADRC控制時的最大跟蹤角度誤差在0.5°以內,能滿足設計指標的要求。
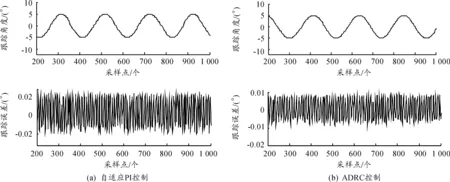
圖6 正弦信號響應曲線
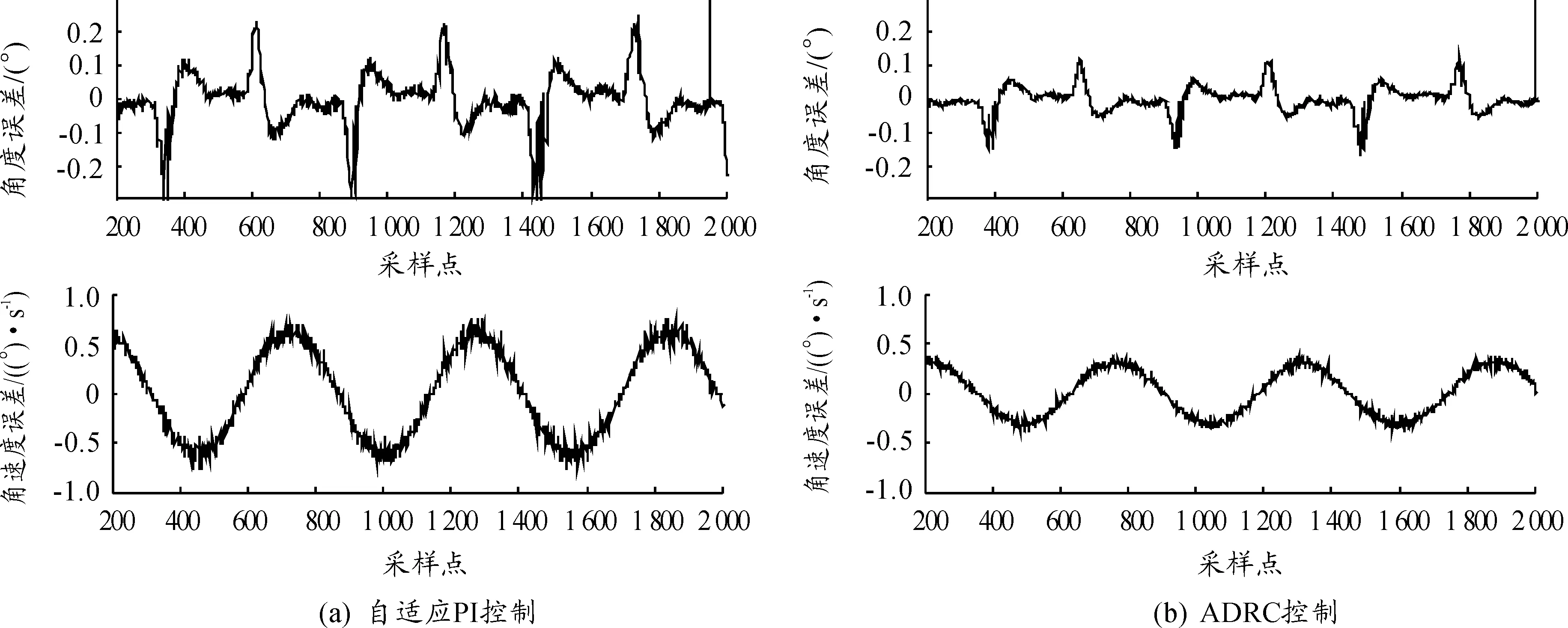
圖7 1°/0.2 Hz擾動下跟蹤誤差曲線
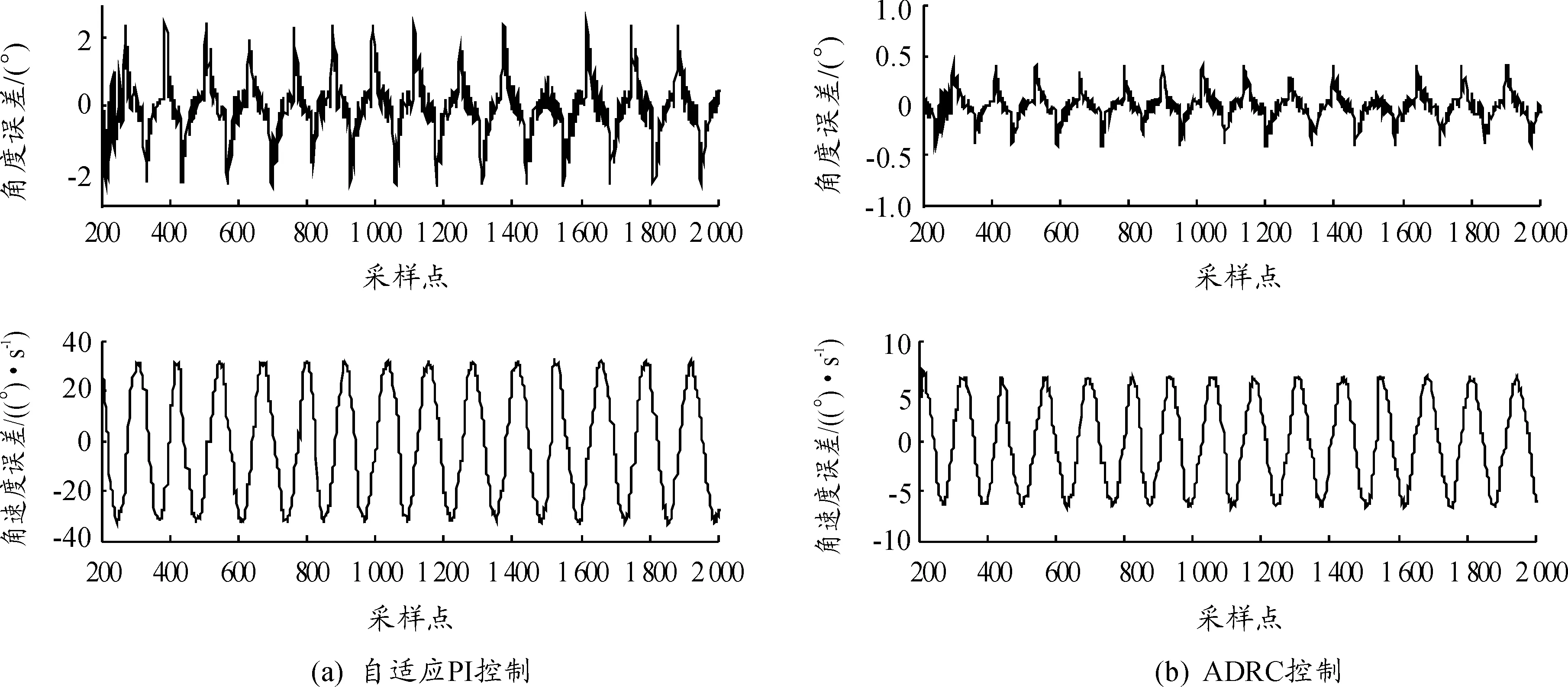
圖8 10°/1 Hz擾動下跟蹤誤差曲線
5 結論
設計了電視跟蹤導引頭伺服系統的自抗擾控制器,選用線性函數設計ESO。與自適應PI控制相比,ADRC不要求掌握擾動的精確數學模型,能夠利用其擴張狀態觀測器觀測出導引頭伺服系統的各種干擾力矩并進行補償,還能解決系統模型失配的問題。實驗結果證明了ADRC控制器的優良性能。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55