基于人工勢(shì)場(chǎng)法的筒彈自動(dòng)裝填路徑規(guī)劃
2020-05-18 02:51:20王旭烽劉可平唐曉峰
兵器裝備工程學(xué)報(bào) 2020年4期
陳 飛,王旭烽,劉可平,唐曉峰,劉 寧
(1.南京理工大學(xué) 機(jī)械工程學(xué)院, 南京 210094;2.上海機(jī)電工程研究所, 上海 201109)
傳統(tǒng)的筒彈裝填是利用吊機(jī)及吊索在操作人員的輔助下完成,此方法費(fèi)時(shí)費(fèi)力,影響備戰(zhàn)效率。在改進(jìn)過(guò)程中引入自動(dòng)裝填的概念。在已知障礙物的空間信息后,對(duì)裝填車上起始位置及發(fā)射車上目標(biāo)裝填位置進(jìn)行路徑規(guī)劃,得出一條最優(yōu)的路徑,供吊機(jī)和吊具執(zhí)行筒彈裝填操作。近年來(lái),路徑規(guī)劃逐漸成為國(guó)內(nèi)外智能機(jī)器研究中的一項(xiàng)關(guān)鍵內(nèi)容[1]。機(jī)器根據(jù)已知的局部環(huán)境信息,在不碰到障礙物的要求下,規(guī)劃出一條從起點(diǎn)到目標(biāo)點(diǎn)并滿足特定要求的最優(yōu)或次最優(yōu)路徑,以供機(jī)器執(zhí)行下一步操作。
目前解決路徑規(guī)劃的方法很多,有人工勢(shì)場(chǎng)法[2]、遺傳算法[3]、模糊算法[4]、神經(jīng)網(wǎng)絡(luò)算法[5]、蟻群算法[6]等。其中人工勢(shì)場(chǎng)法因其原理簡(jiǎn)單、規(guī)劃路徑時(shí)間短、效率高等特點(diǎn),被廣泛應(yīng)用于智能機(jī)器的各種路徑規(guī)劃中。但同時(shí),傳統(tǒng)的人工勢(shì)場(chǎng)法存在陷入局部極小值點(diǎn)導(dǎo)致目標(biāo)點(diǎn)不可達(dá)、靠近障礙物時(shí)出現(xiàn)抖動(dòng)等問(wèn)題。針對(duì)這些問(wèn)題,許多研究者提出了有效的改進(jìn)方法。彭艷等[7]利用切點(diǎn)法對(duì)人工勢(shì)場(chǎng)法進(jìn)行優(yōu)化,以切點(diǎn)為施力點(diǎn)進(jìn)行路徑規(guī)劃,解決了震蕩和目標(biāo)點(diǎn)不可達(dá)問(wèn)題;張鵬彬等[8]設(shè)置中間目標(biāo)點(diǎn),有效地使機(jī)器人脫離局部極小值點(diǎn);韓偉等[9]借助專家經(jīng)驗(yàn)進(jìn)行模糊決策[10],對(duì)機(jī)器合力的大小和方向做出調(diào)整,使得機(jī)器人準(zhǔn)確地到達(dá)目標(biāo)點(diǎn);師五喜等[11]提出了雙層遞階模糊系統(tǒng)的方法,一階系統(tǒng)調(diào)整斥力增益系數(shù),二階系統(tǒng)對(duì)合力的信息進(jìn)行改變,有效地避免抖動(dòng)并達(dá)到優(yōu)化路徑的目的;梁獻(xiàn)霞等[12]提出設(shè)置虛擬障礙物的方法,改變機(jī)器人的運(yùn)動(dòng)方向,從而順利到達(dá)目標(biāo)點(diǎn);鄧青等[13]提出一種混合路徑規(guī)劃的方法,使得裝甲車能夠在虛擬戰(zhàn)場(chǎng)環(huán)境里根據(jù)地形信息選擇機(jī)動(dòng)路線,實(shí)現(xiàn)良好的路徑規(guī)劃。
現(xiàn)有研究中,大多都是針對(duì)移動(dòng)機(jī)器人、車輛、機(jī)械臂和無(wú)人機(jī)進(jìn)行路徑規(guī)劃,而筒彈自動(dòng)裝填條件下的路徑規(guī)劃鮮有研究。尤其是在考慮三維障礙物模型時(shí),實(shí)際情況中車上障礙物區(qū)域多為矩形,但大多數(shù)研究都只將障礙物簡(jiǎn)化成球體,并未考慮障礙物的邊角等矩形區(qū)域。此外在優(yōu)化增益系數(shù)時(shí),多數(shù)研究者都只單獨(dú)對(duì)斥力增益系數(shù)進(jìn)行優(yōu)化,并未同時(shí)考慮引力增益系數(shù)和斥力增益系數(shù)對(duì)三維路徑的影響。對(duì)此,本文以某筒彈自動(dòng)裝填車和發(fā)射車為研究對(duì)象,建立裝填車和發(fā)射車上的矩形障礙物模型。在改進(jìn)勢(shì)場(chǎng)函數(shù)的基礎(chǔ)上,利用最優(yōu)化方法同時(shí)對(duì)引力增益系數(shù)和斥力增益系數(shù)進(jìn)行優(yōu)化,以實(shí)現(xiàn)避開(kāi)局部極小值點(diǎn)和優(yōu)化路徑的目的。文中所提到的最優(yōu)路徑即為長(zhǎng)度最短的路徑。
1 人工勢(shì)場(chǎng)法
1.1 傳統(tǒng)人工勢(shì)場(chǎng)法
1986年,Khatib[14]首次提出人工勢(shì)場(chǎng)法,其基本原理是把運(yùn)動(dòng)體在某環(huán)境中的運(yùn)動(dòng)看作是在虛擬勢(shì)場(chǎng)中受到勢(shì)場(chǎng)力引導(dǎo)下的運(yùn)動(dòng)。虛擬勢(shì)場(chǎng)包含目標(biāo)點(diǎn)處產(chǎn)生的引力場(chǎng)和障礙物處產(chǎn)生的斥力場(chǎng),兩個(gè)力場(chǎng)的合成方向則決定了運(yùn)動(dòng)體的運(yùn)動(dòng)方向。因此,人工勢(shì)場(chǎng)可以定義為:
U=Ua+Ur
(1)
式中:Ua為目標(biāo)點(diǎn)處的引力場(chǎng);Ur為障礙物處的斥力場(chǎng),定義兩個(gè)力場(chǎng)的負(fù)梯度分別為引力和斥力。
結(jié)合空間動(dòng)力學(xué)和拉格朗日方程,合成的人工勢(shì)場(chǎng)對(duì)運(yùn)動(dòng)體的作用力F為:
F=Fa+Fr
(2)
式中:Fa為目標(biāo)點(diǎn)對(duì)運(yùn)動(dòng)體的引力;Fr為障礙物對(duì)運(yùn)動(dòng)體的排斥力。
在二維平面中,運(yùn)動(dòng)點(diǎn)在未達(dá)到目標(biāo)點(diǎn)前,目標(biāo)點(diǎn)對(duì)其會(huì)持續(xù)存在吸引趨勢(shì),且該引力與距離成正比。故將引力勢(shì)場(chǎng)函數(shù)定義為:
(3)
式中:g為引力增益系數(shù);X為運(yùn)動(dòng)點(diǎn)的當(dāng)前位置;Xg為目標(biāo)點(diǎn)的位置;(X-Xg)為當(dāng)前運(yùn)動(dòng)點(diǎn)與目標(biāo)點(diǎn)之間的距離。對(duì)引力勢(shì)場(chǎng)函數(shù)求負(fù)梯度得出引力Fa為:
Fa=-▽(Ua)=g(X-Xg)
(4)
障礙物附近斥力場(chǎng)的處理和引力場(chǎng)相似。假設(shè)障礙物自身存在一定的影響范圍,當(dāng)運(yùn)動(dòng)點(diǎn)與障礙物之間的最短距離大于影響范圍時(shí),運(yùn)動(dòng)點(diǎn)不受斥力的作用;當(dāng)最短距離小于或等于影響范圍時(shí),運(yùn)動(dòng)點(diǎn)受到斥力的作用,且該斥力與最短距離成反比。故將斥力場(chǎng)函數(shù)定義為:
(5)
式中:m為斥力增益系數(shù);ρ為運(yùn)動(dòng)點(diǎn)到障礙物之間的最短距離;w為障礙物自身的影響范圍。對(duì)斥力場(chǎng)函數(shù)求負(fù)梯度得出斥力Fr為:

(6)
運(yùn)動(dòng)點(diǎn)在引力和斥力的合力作用下運(yùn)動(dòng)時(shí),其受力情況如圖1所示。
圖1 運(yùn)動(dòng)點(diǎn)的受力情況
傳統(tǒng)的人工勢(shì)場(chǎng)法主要存在如下兩點(diǎn)缺陷:
1) 陷入極小值點(diǎn)。當(dāng)運(yùn)動(dòng)點(diǎn)在運(yùn)動(dòng)過(guò)程中受到的引力和斥力的大小相等且方向相反時(shí),運(yùn)動(dòng)點(diǎn)將誤以為已到達(dá)目標(biāo)點(diǎn),無(wú)法確定下一步的運(yùn)動(dòng)方向,即陷入極小值點(diǎn),從而停止運(yùn)動(dòng)。
2) 目標(biāo)點(diǎn)不可達(dá)。當(dāng)目標(biāo)點(diǎn)在障礙物的影響范圍內(nèi)時(shí),運(yùn)動(dòng)點(diǎn)受到的斥力大于引力,從而導(dǎo)致運(yùn)動(dòng)點(diǎn)一直在目標(biāo)點(diǎn)附近徘徊,無(wú)法到達(dá)目標(biāo)點(diǎn)。
1.2 改進(jìn)人工勢(shì)場(chǎng)法
針對(duì)上述人工勢(shì)場(chǎng)法的缺陷,引入相對(duì)距離的概念。即在計(jì)算斥力場(chǎng)的同時(shí)考慮運(yùn)動(dòng)點(diǎn)與目標(biāo)點(diǎn)間的相對(duì)距離,通過(guò)改進(jìn)斥力場(chǎng)函數(shù)[15]來(lái)解決目標(biāo)點(diǎn)不可達(dá)問(wèn)題。
當(dāng)目標(biāo)點(diǎn)在障礙物的作用范圍內(nèi)時(shí),整個(gè)勢(shì)場(chǎng)的最小點(diǎn)并不是目標(biāo)點(diǎn),原因在于運(yùn)動(dòng)點(diǎn)在靠近目標(biāo)點(diǎn)的同時(shí),障礙物的勢(shì)場(chǎng)也在迅速增大,從而運(yùn)動(dòng)點(diǎn)到達(dá)不了目標(biāo)點(diǎn)。若運(yùn)動(dòng)點(diǎn)在靠近目標(biāo)點(diǎn)時(shí),障礙物的勢(shì)場(chǎng)趨向于零,則目標(biāo)點(diǎn)將是該勢(shì)場(chǎng)環(huán)境下的最小點(diǎn)。因此在定義斥力場(chǎng)函數(shù)時(shí),需要將運(yùn)動(dòng)點(diǎn)與目標(biāo)點(diǎn)間的相對(duì)距離考慮在內(nèi)。修改后的斥力場(chǎng)函數(shù)如下:
(7)
其中增加了調(diào)節(jié)項(xiàng)(X-Xg)n,n為大于零的實(shí)數(shù)。此調(diào)節(jié)項(xiàng)可確保斥力場(chǎng)在目標(biāo)點(diǎn)處最小。相應(yīng)的斥力函數(shù)修改為:
(8)
式中:Fr1和Fr2為Fr的兩個(gè)分力;Fr1的方向?yàn)閺恼系K物指向運(yùn)動(dòng)點(diǎn);Fr2的方向?yàn)閺倪\(yùn)動(dòng)點(diǎn)指向目標(biāo)點(diǎn),分別表達(dá)如下:
(9)

(10)
2 模型建立
在野外作戰(zhàn)環(huán)境下實(shí)施筒彈自動(dòng)裝填前,發(fā)射車和裝填車按要求停車到位,如圖2所示。經(jīng)調(diào)平后,兩車相對(duì)空間位置固定,圖中所示圓為吊機(jī)攜帶吊具所能到達(dá)的吊裝范圍。在筒彈裝填前,需將裝填空間內(nèi)的障礙物區(qū)域信息提前錄入主控計(jì)算機(jī)內(nèi)進(jìn)行路徑解算。發(fā)射車和裝填車上的障礙物主要有光電裝置、雷達(dá)、轉(zhuǎn)塔、油機(jī)電站等,這些設(shè)備作為障礙物所構(gòu)成的區(qū)域大多為矩形區(qū)域。但很多研究者僅僅將三維障礙物區(qū)域簡(jiǎn)化擴(kuò)展成球體進(jìn)行建模計(jì)算。本文綜合考慮實(shí)際障礙物區(qū)域和斥力計(jì)算方法,采用矩形障礙物模型對(duì)實(shí)際筒彈裝填進(jìn)行數(shù)值仿真。
圖2 裝填車與發(fā)射車的相對(duì)位置示意圖
為了仿真不同障礙物區(qū)域的效果,建立矩形障礙物模型如圖3所示,球體障礙物模型如圖4所示。圖3中,黑色部分代表發(fā)射車和裝填車的車體平面,白色部分代表筒彈聯(lián)裝架。并將每個(gè)長(zhǎng)方體離散成若干個(gè)點(diǎn),便于后續(xù)計(jì)算距離ρ。裝填車上筒彈聯(lián)裝架起吊的起始點(diǎn)簡(jiǎn)化為起點(diǎn)(50,30,65),發(fā)射車上裝填位上方點(diǎn)簡(jiǎn)化為目標(biāo)點(diǎn)(242.5,90,73),障礙物的起點(diǎn)分別為(25,40,50)、(25,50,60)、(200,40,50)、(200,50,60),長(zhǎng)寬高分別為(50,100,10)、(15,80,5)、(50,100,10)、(15,80,5)。圖4中起點(diǎn)與目標(biāo)點(diǎn)的位置與圖3中相同,球體障礙物的中心點(diǎn)為(50,65,50)和(235,65,50),半徑為25(高度方向上的包絡(luò)值)。
圖3 矩形障礙物模型
圖4 球體障礙物模型
3 仿真計(jì)算
運(yùn)動(dòng)點(diǎn)的運(yùn)動(dòng)計(jì)算流程如圖5所示。運(yùn)動(dòng)點(diǎn)從起點(diǎn)出發(fā),按照運(yùn)動(dòng)點(diǎn)指向目標(biāo)點(diǎn)的方向運(yùn)動(dòng);每走一步,計(jì)算當(dāng)前運(yùn)動(dòng)點(diǎn)與矩形障礙物中每個(gè)點(diǎn)的距離ρ,并比較該距離與障礙物的影響范圍w。若ρ>w,則按運(yùn)動(dòng)點(diǎn)原來(lái)的運(yùn)動(dòng)方向繼續(xù)運(yùn)動(dòng);若ρ≤w,則計(jì)算虛擬力在每個(gè)方向上分力的大小,從而更新上一步運(yùn)動(dòng)點(diǎn)的坐標(biāo),改變方向繼續(xù)運(yùn)動(dòng)。
圖5 運(yùn)動(dòng)點(diǎn)的計(jì)算流程框圖
3.1 球體與矩形障礙物對(duì)比
首先利用傳統(tǒng)的人工勢(shì)場(chǎng)法分別對(duì)球體和矩形障礙物進(jìn)行仿真分析,式(2)為人工勢(shì)場(chǎng)對(duì)運(yùn)動(dòng)體的作用力。取引力增益系數(shù)g=5,斥力增益系數(shù)m=1,障礙物影響范圍w=1。仿真結(jié)果如圖6所示。
圖6(a)中,黑線表示運(yùn)動(dòng)點(diǎn)在球體障礙物區(qū)域下規(guī)劃的路徑,仿真得出該路徑的長(zhǎng)度L為201.8;圖6(b)中,黑線表示運(yùn)動(dòng)點(diǎn)在矩形障礙物區(qū)域下規(guī)劃的路徑,運(yùn)動(dòng)點(diǎn)運(yùn)動(dòng)到(194,74,71)該位置時(shí),陷入局部極小值點(diǎn)并停止運(yùn)動(dòng),無(wú)法到達(dá)目標(biāo)點(diǎn)。
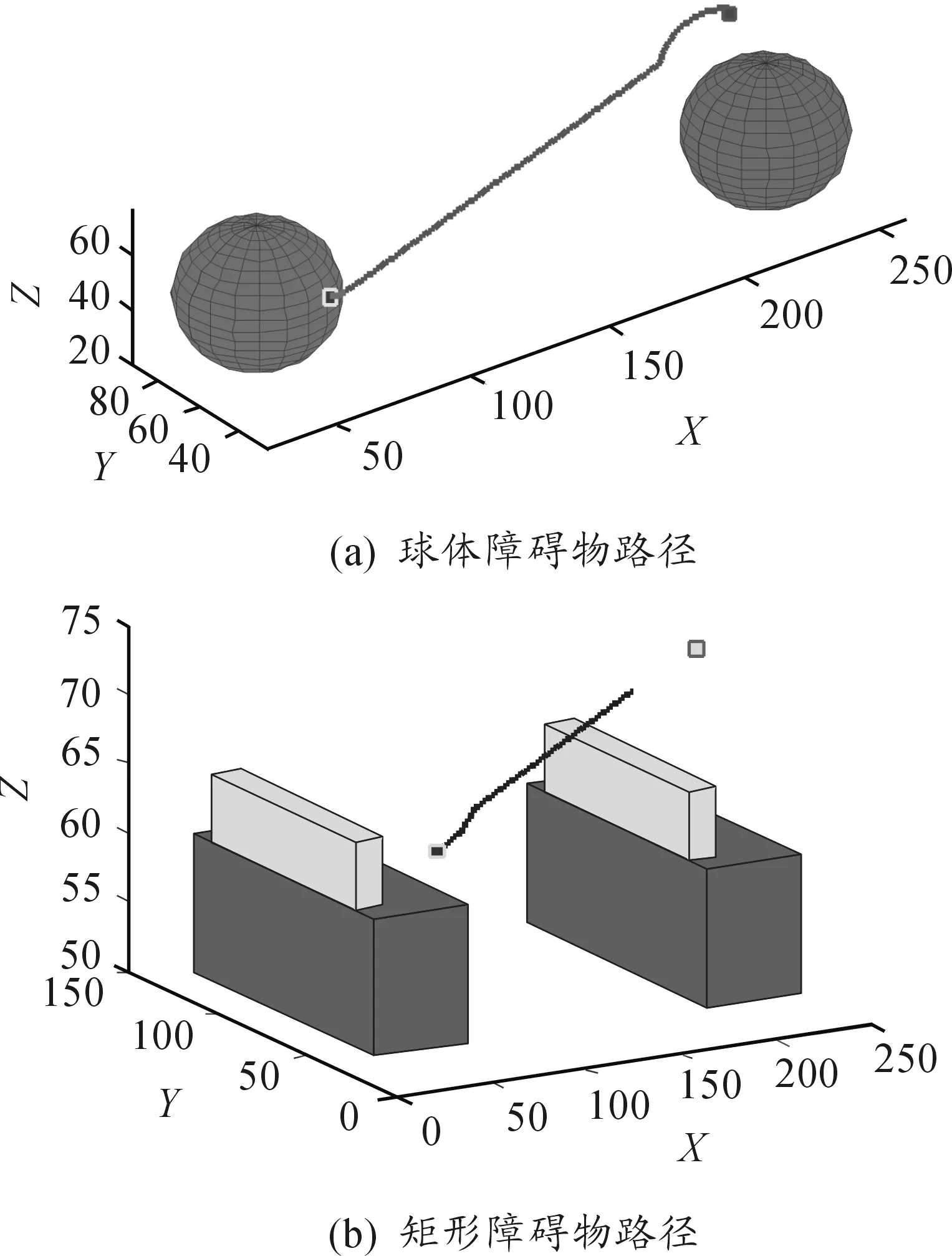
圖6 傳統(tǒng)人工勢(shì)場(chǎng)法規(guī)劃的路徑
3.2 傳統(tǒng)與改進(jìn)人工勢(shì)場(chǎng)法對(duì)比
針對(duì)傳統(tǒng)人工勢(shì)場(chǎng)法下出現(xiàn)的如圖6(b)所示極小值點(diǎn)情況,采用公式(7)對(duì)斥力場(chǎng)函數(shù)進(jìn)行改進(jìn)。取n=2,在其余參數(shù)不變的情況下進(jìn)行仿真,結(jié)果如圖7所示。改進(jìn)后運(yùn)動(dòng)點(diǎn)能夠在該特殊位置下,改變極小值點(diǎn)處的運(yùn)動(dòng)方向,順利繞過(guò)障礙物到達(dá)目標(biāo)點(diǎn)。仿真得出該路徑的長(zhǎng)度L為197.6。
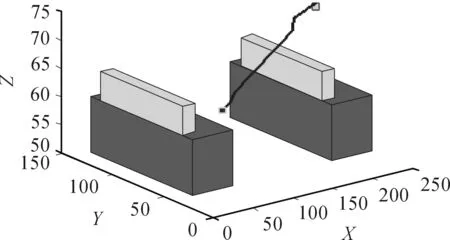
圖7 改進(jìn)人工勢(shì)場(chǎng)法規(guī)劃的路徑
對(duì)比圖6和圖7可知:如圖6(a),采用傳統(tǒng)的人工勢(shì)場(chǎng)法,障礙物為球體時(shí),規(guī)劃路徑的長(zhǎng)度L=201.8;如圖6(b),障礙物為矩形時(shí),傳統(tǒng)人工勢(shì)場(chǎng)法存在陷入局部極小值點(diǎn)、目標(biāo)不可達(dá)問(wèn)題,無(wú)法進(jìn)行完整的路徑規(guī)劃;而在圖7中,改進(jìn)后的人工勢(shì)場(chǎng)法使得矩形障礙物解決了原有問(wèn)題,并成功規(guī)劃出一條優(yōu)于球體障礙物的更短路徑L=197.6。因此,矩形障礙物模型是合理的。矩形障礙物模型比球體障礙物模型規(guī)劃的路徑更優(yōu),且矩形障礙物模型更接近真實(shí)場(chǎng)景。
3.3 增益系數(shù)的影響
采用改進(jìn)后的人工勢(shì)場(chǎng)法,在矩形障礙物模型的基礎(chǔ)上,考慮增益系數(shù)的影響。整個(gè)勢(shì)場(chǎng)函數(shù)中存在兩個(gè)增益系數(shù),為引力增益系數(shù)g和斥力增益系數(shù)m,它們分別對(duì)引力和斥力進(jìn)行調(diào)節(jié)。研究中發(fā)現(xiàn),增益系數(shù)的變化影響特定環(huán)境下的最優(yōu)路徑。若要單獨(dú)對(duì)某一增益系數(shù)進(jìn)行優(yōu)化時(shí),需在給定區(qū)間內(nèi)利用最優(yōu)化方法進(jìn)行求解,從而得到最優(yōu)路徑;若要同時(shí)對(duì)兩個(gè)增益系數(shù)進(jìn)行優(yōu)化,則需給定兩個(gè)增益系數(shù)分別對(duì)應(yīng)的區(qū)間,并對(duì)應(yīng)相應(yīng)的路徑長(zhǎng)度;再結(jié)合最優(yōu)化方法,對(duì)區(qū)間內(nèi)的增益系數(shù)進(jìn)行調(diào)整,并尋找其中的最優(yōu)解,以使得路徑最優(yōu),從而實(shí)現(xiàn)路徑優(yōu)化。
最優(yōu)化方法[16]是求一個(gè)多元函數(shù)在某個(gè)給定集合上的極值,可用如下數(shù)學(xué)模型描述:
minL=f(m,g)
s.t.m∈K1,g∈K2
(11)
其中:K1、K2為給定的集合;L=f(m,g)為定義在集合K1、K2上的路徑實(shí)值函數(shù);m、g為兩增益系數(shù)。
分析不同的引力增益系數(shù)和斥力增益系數(shù)對(duì)路徑的影響,采用改進(jìn)后的勢(shì)場(chǎng)函數(shù)進(jìn)行仿真,路徑的長(zhǎng)度為L(zhǎng),結(jié)果如圖8、圖9所示。
由仿真結(jié)果可以看出,在斥力增益系數(shù)及其他參數(shù)相同的情況下,改變引力增益系數(shù),路徑的長(zhǎng)度會(huì)隨之改變;同樣,在引力增益系數(shù)相同的情況下,改變斥力增益系數(shù),路徑也會(huì)隨之變化。因此以引力增益系數(shù)和斥力增益系數(shù)為自變量,以路徑長(zhǎng)度為目標(biāo),構(gòu)建多元函數(shù),并利用最優(yōu)化函數(shù)即式(11)對(duì)其進(jìn)行優(yōu)化,所得結(jié)果如圖10所示。
由圖10可知,兩增益系數(shù)共同影響路徑長(zhǎng)度L。當(dāng)引力增益系數(shù)g在(1,5)、斥力增益系數(shù)m在(5,15)組成的平面內(nèi)時(shí),路徑的長(zhǎng)度L變化幅度非常小。因此在取增益系數(shù)時(shí),只要兩增益系數(shù)落在上述區(qū)間內(nèi),都能得到最優(yōu)路徑,其取值L=195。
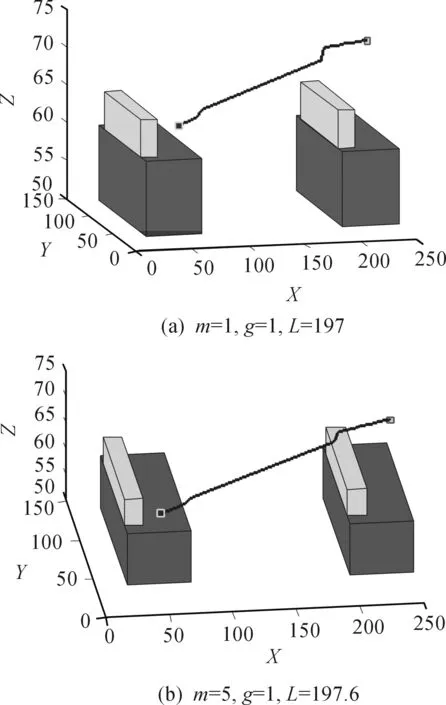
圖8 相同斥力增益系數(shù),不同引力增益系數(shù)下的路徑
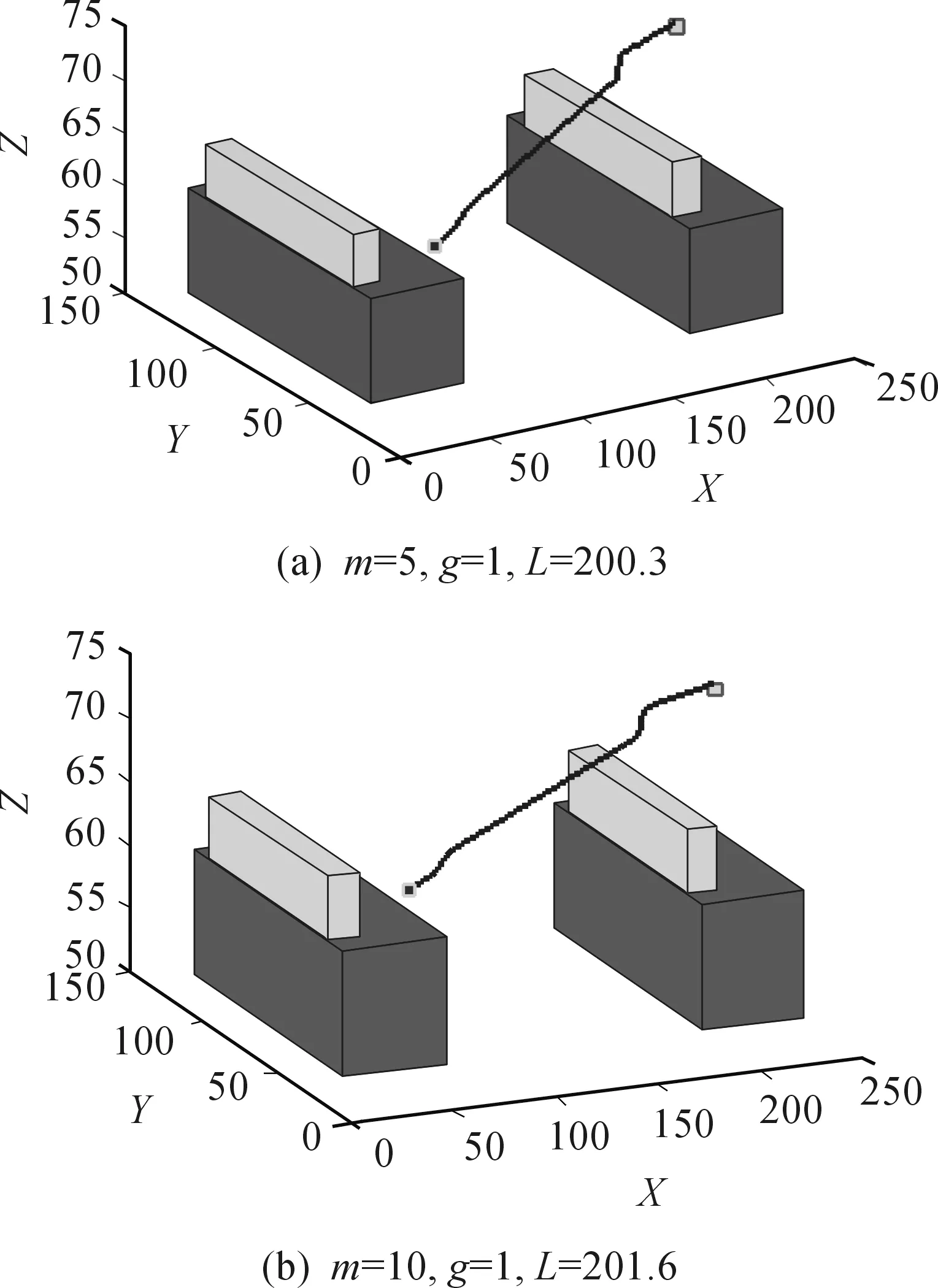
圖9 相同引力增益系數(shù),不同斥力增益系數(shù)下的路徑
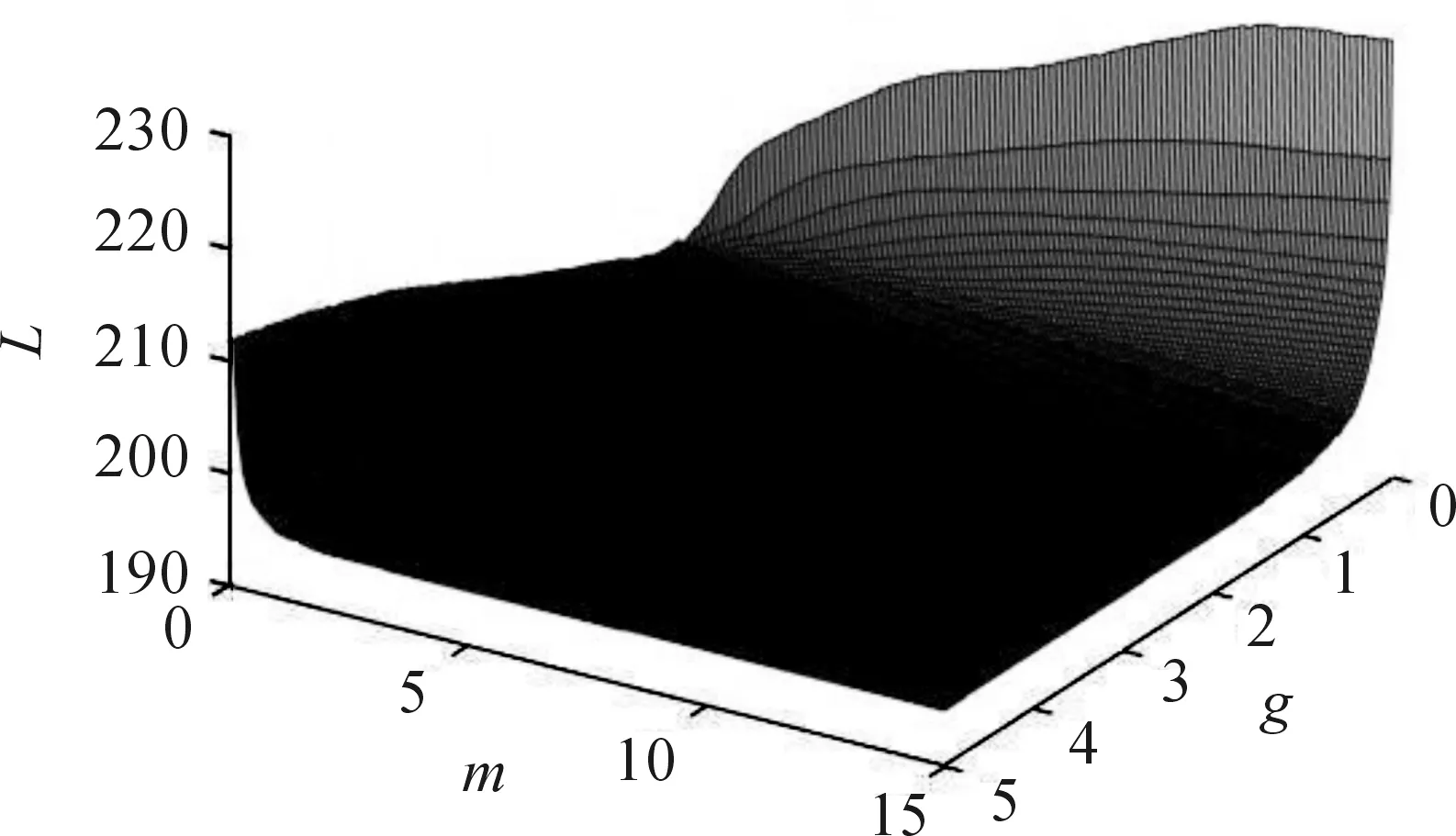
圖10 優(yōu)化后的路徑長(zhǎng)度隨增益系數(shù)的變化
4 結(jié)論
1) 較之球體障礙物模型,矩形障礙物模型能更真實(shí)地模擬車上障礙物的實(shí)際區(qū)域,并且矩形障礙物下的路徑規(guī)劃更優(yōu)。
2) 對(duì)斥力場(chǎng)函數(shù)進(jìn)行改進(jìn)后的人工勢(shì)場(chǎng)法,能夠使運(yùn)動(dòng)點(diǎn)成功脫離局部極小值點(diǎn)到達(dá)目標(biāo)點(diǎn)。
3) 同時(shí)對(duì)引力增益系數(shù)和斥力增益系數(shù)進(jìn)行優(yōu)化時(shí),給定系數(shù)一定范圍內(nèi),能夠?qū)ふ业教囟ㄔ鲆嫦禂?shù),使得該增益系數(shù)下的路徑為最優(yōu)。