彈藥運輸車恒穩(wěn)控制系統(tǒng)的設(shè)計
2020-05-18 02:35:42張小明王坤坤于紀言
兵器裝備工程學(xué)報 2020年4期
張小明,王坤坤,于紀言
(1.南京理工大學(xué) 機械工程學(xué)院, 南京 210094; 2.河海大學(xué) 能源與電氣學(xué)院, 南京 211100)
目前我國彈藥近距離運輸主要依靠人工或其他簡易載具,大到中型口徑火炮小到各種口徑的槍械彈藥,從彈藥庫或臨時存放處運送到用藥點的距離一般都很近,而在地形環(huán)境較為復(fù)雜的情況下,由人力推車近距離的運送彈藥不可避免的會造成彈體之間的摩擦碰撞甚至傾斜墜地,為了安全起見應(yīng)該極力避免這種情況的發(fā)生,盡管目前在彈藥箱內(nèi)會填充適量柔軟填充物,但在路面較為復(fù)雜的情況下,碰撞仍然不可避免。我國目前在近距離彈藥運輸方面的研究應(yīng)用較少,基本沒有可以保證彈藥近距離安全可靠運輸?shù)妮d具投入實戰(zhàn)應(yīng)用,在相關(guān)領(lǐng)域針對防抖恒穩(wěn)平臺出現(xiàn)了幾種不同的控制方法,文獻[1]設(shè)計了微粒群算法優(yōu)化參數(shù)的模糊滑模控制算法,并針對強摩擦力矩進行了算法改進,其穩(wěn)定平臺的水平隨動跟蹤精度達到10-5rad,但其重力傳感器易受干擾,不易運用于復(fù)雜工況。文獻[2]針對連續(xù)非線性系統(tǒng)的未建模動態(tài)和有界干擾問題,設(shè)計了基于自適應(yīng)模糊滑模控制的電動液壓伺服水平防抖機構(gòu),其環(huán)境適應(yīng)性強,魯棒性強,但控制精度不高,不適用于跟隨性要求較高的場合。文獻[3]針對車載云臺提出了前饋校正和主動阻尼防抖兩種控制策略,經(jīng)驗證可以有效地降低系統(tǒng)的沖擊度,提升平順性,但其控制精度較低,只能起到減緩振蕩的作用。
本研究基于模糊自適應(yīng)參數(shù)整定的PID控制算法設(shè)計了近距離恒穩(wěn)彈藥運輸車,不管小車行走的路況如何,彈藥在運輸平臺上始終能夠保持水平放置,最大程度的減少彈體之間的碰撞摩擦,保證彈藥的安全運送。
1 恒穩(wěn)彈藥運輸車數(shù)學(xué)模型
恒穩(wěn)彈藥運輸車由運輸車體、舵機、電位計、支桿、彈藥艙和水平儀組成,其中舵機與運輸車體固聯(lián),用于驅(qū)動支桿在豎直平面內(nèi)擺動;電位計與舵機同軸,且可與電機同軸轉(zhuǎn)動,用于測量支桿在豎直平面內(nèi)的位置,不同的角度對應(yīng)不同的電位計測量值;支桿聯(lián)接在電位計軸上,同理可同軸在豎直平面內(nèi)轉(zhuǎn)動;彈藥艙與支桿另一端固聯(lián),用于擺放彈藥;水平儀與彈藥艙周邊固聯(lián),可保持彈藥在藥倉內(nèi)水平位置始終不變,其結(jié)構(gòu)如圖1所示。
圖1 恒穩(wěn)彈藥運輸車結(jié)構(gòu)示意圖
其中彈藥艙內(nèi)用于放置彈藥的水平儀的具體局部結(jié)構(gòu)如圖2所示。
圖2 彈藥艙內(nèi)水平儀結(jié)構(gòu)示意圖
其中豎直支桿的長度為L,擺桿質(zhì)心到電位器旋轉(zhuǎn)軸中心的距離為L′=L/2,支桿相對于平面坐標系豎直y軸正方向的角位移為θ。當支桿與豎直y軸正向之間存在夾角即θ不為0時,忽略各部件之間的摩擦,對支桿進行受力分析,如圖3所示。
其中:支桿的質(zhì)量為m;彈藥艙及彈藥的總質(zhì)量為M;舵機施加在支桿底端的扭矩為T;電位器旋轉(zhuǎn)軸對支桿的支撐力為N;則對支桿的受力分析為:
∑Fy=0 :
N=(m+M)g
(1)
∑T=0:

(2)
由式(1)和式(2)可得支桿的運動方程為:
(3)
2 彈藥運輸車恒穩(wěn)控制系統(tǒng)設(shè)計
彈藥運輸車恒穩(wěn)控制系統(tǒng)采用PID算法結(jié)構(gòu),控制過程中由于電機頻繁換向,示波器顯示電流在換向處存在一段高頻振蕩。由于控制電路板地線、3.3 V電源線和晶振的布局,也導(dǎo)致控制信號存在不規(guī)律高頻振蕩。從以往研究得出一階低通濾波器針對高頻振蕩有很好的濾除效果。為了解決在控制過程中存在的振蕩問題,針對性的在角度控制的程序中加入一階低通濾波環(huán)節(jié),結(jié)合模糊自適應(yīng)參數(shù)整定使控制器在工況復(fù)雜的情況下實時調(diào)整控制參數(shù),提升其跟隨性和抗干擾能力。
2.1 PID控制器的設(shè)計
彈藥恒穩(wěn)運輸車的支桿控制系統(tǒng)是一種非線性、不穩(wěn)定、魯棒性較差的典型控制對象,為了使支桿一直穩(wěn)定在目標的豎直位置,要將支桿相對于y軸正向的角位移θ作為被控量,將θ與目標位置的偏差代入PID控制表達式中進行計算,其中經(jīng)典的PID控制模型為:
(4)
式中:u為控制器輸出;e為期望值與實際輸出的偏差;kp為比例系數(shù);ki為積分系數(shù);kd為微分系數(shù)。根據(jù)功能要求,最終設(shè)計出PID控制框圖如圖4。
圖4 直立PID控制框圖
電位器測得的支桿的實際位置與設(shè)定的目標位置之間的差值作為PID控制器的輸入,控制器的輸出作為整個系統(tǒng)的輸出。此處采用包含比例和微分環(huán)節(jié)的位置式表達式來達到控制要求。
2.2 一階低通濾波算法原理
一階低通濾波也稱作一節(jié)慣性濾波,通常是用C語言編程來實現(xiàn)普通硬件RC低通濾波器的濾波功能,在特定頻率的目標信號的基礎(chǔ)上濾除高頻的干擾信號,干擾信號的頻率越高濾波作用越明顯,具有操作簡單便于工程實現(xiàn)的優(yōu)點[4]。
一階低通濾波的算法公式為:
p(n)=c·q(n)+(1-c)·p(n-1)
(5)
式中:c為濾波系數(shù);q(n)為本次采樣值;p(n-1)為上次濾波輸出值;p(n)為本次濾波輸出值。一階低通濾波采用本次采樣值與上次濾波輸出值進行加權(quán),得到有效濾波值,使得輸出對輸入有反饋作用。
在直立角度控制代碼中加入中一階低通濾波,結(jié)合上述支桿直立角度控制部分程序其最終的代碼實現(xiàn)如下:
int balance(float Angle)
{
float Bias;
static float Last_Bias,D_Bias,Least;
int PWM;
Least =Angle-Y;
Bias *=0.8f;
Bias+= Least*0.2f;
D_Bias=Bias-Last_Bias;
PWM =Balance_KP*Bias+D_Bias*Balance_KD;
Last_Bias=Bias;
return PWM;
}
其中Y為支桿處于目標位置時與y軸正方向重合時電位器的數(shù)據(jù),Angle為支桿處于任意位置時電位器的數(shù)據(jù),Bias 為本次誤差,Last_Bias為上次誤差,D_Bias為誤差微分,Balance_KP為比例控制系數(shù),Balance_KD為微分控制系數(shù)。
式中PWM即為最終由控制器芯片相對應(yīng)的引腳輸出到舵機的控制信號,PWM是脈沖寬度調(diào)制的英文縮寫,它是利用微處理器的數(shù)字輸出來對模擬電路進行控制的一種非常有效的技術(shù)[5],通過調(diào)節(jié)占空比的變化來調(diào)節(jié)信號、能量的變化,舵機由PWM信號進行控制,脈沖的參數(shù)有最大值、最小值和頻率。
2.3 模糊自適應(yīng)PID控制
傳統(tǒng)PID控制器的3個控制參數(shù)不能根據(jù)工況的變化做出實時調(diào)整,因此在傳統(tǒng)PID控制器的基礎(chǔ)上加入模糊自適應(yīng)控制算法,提高整個控制系統(tǒng)的精確性,以達到使系統(tǒng)在動態(tài)過渡過程中系統(tǒng)超調(diào)量減小、調(diào)節(jié)速度加快等目的[6]。模糊自適應(yīng)控制是將被控量按照人的思維方式和推理習(xí)慣進行模糊化處理,根據(jù)專家知識庫,應(yīng)用各種推理方法得到最終滿足控制要求的控制量[7],模糊控制系統(tǒng)的核心是模糊邏輯控制器,模糊自適應(yīng)參數(shù)整定PID控制器的結(jié)構(gòu)如圖5所示[8]。
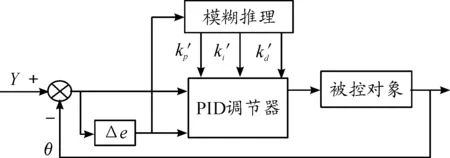
圖5 模糊自適應(yīng)PID控制器結(jié)構(gòu)框圖
(6)
此處根據(jù)e與Δe的取值,將參數(shù)整定分為以下4種情況:
1) 當|e|較大時,為使系統(tǒng)有較好的跟蹤性能,應(yīng)取較大的kp、較小的kd,同時為了避免系統(tǒng)響應(yīng)出現(xiàn)較大的超調(diào)量,必須限制積分作用,可取ki=0;
2) 當e*Δe>0時,此時|e|朝著增大的方向變化。若e較大,此時可讓控制器實施較強的控制作用,因此取較大的kp,較小的ki,kd取值不宜太大; 若|e|較小, 可讓控制器實施一般的控制作用,只要扭轉(zhuǎn)e的變化趨勢, 使|e|朝著減小的方向變化;
3) 當e*Δe<0或者e=0時,說明|e|朝著減小的方向變化,或者已達到平衡的狀態(tài),此時不調(diào)整控制器參數(shù),保持控制器輸出不變;
4) 當e*Δe=0,e≠0 時,表明系統(tǒng)的曲線與理論曲線平行或一致。為使系統(tǒng)具有良好的穩(wěn)態(tài)性能,應(yīng)取較大的kp和ki值, 同時為了避免設(shè)定值振蕩,以及提高系統(tǒng)的抗干性能,適當選取kd值[11];
表的模糊控制推理表
表的模糊控制推理表
表的模糊控制推理表
3 實驗測試
為了驗證模糊自適應(yīng)參數(shù)整定PID控制器的控制性能,首先在Matlab中的Simulink里分別搭建傳統(tǒng)PID控制器與模糊自適應(yīng)參數(shù)整定PID控制器的數(shù)學(xué)模型,對兩種控制器輸入相同的單位階躍信號,并在50ms的位置給予二者相同的擾動,用以模擬路況干擾,通過對響應(yīng)曲線特性的分析,比較兩者的優(yōu)劣。
傳統(tǒng)PID控制器的控制參數(shù)主要根據(jù)當前響應(yīng)曲線的響應(yīng)狀態(tài)結(jié)合調(diào)試經(jīng)驗手動調(diào)試從而使控制器達到最佳響應(yīng)狀態(tài)。模糊自適應(yīng)參數(shù)整定PID控制器實時跟隨輸入量e和Δe,利用模糊隸屬函數(shù)按照模糊參數(shù)整定規(guī)則得出可使響應(yīng)始終保持在最佳狀態(tài)時的控制參數(shù)。兩種控制器的階躍信號擾動響應(yīng)曲線如圖6所示。
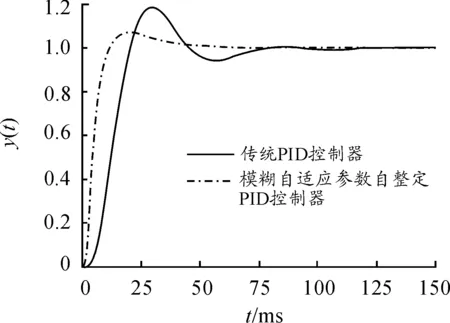
圖6 兩種控制器階躍信號擾動響應(yīng)曲線
通過分析兩者的階躍相應(yīng)曲線,可以得出后者的響應(yīng)速度快于前者約50%,超調(diào)量降低約70%,穩(wěn)態(tài)誤差降低約10%,后者在50 ms擾動位置處基本保持穩(wěn)定,抗干擾能力顯著提高,保證了恒穩(wěn)彈藥運輸車的可靠性和安全性。
為了驗證一階濾波控制器在樣機實物中的作用效果,在樣機的支桿中間位置接高精度位移傳感器的應(yīng)變片,讓樣機保持在水平無顛簸路面行走,分別對未加濾波和加了一階低通濾波的控制器進行實驗,其振蕩幅度曲線如圖7所示。
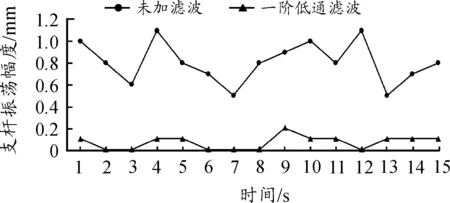
圖7 一階低通濾波作用效果曲線
通過與未加一階低通濾波控制器的測試數(shù)據(jù)相比,加了一階低通濾波控制器的樣機在運行過程中支桿振動幅度總體縮小為原來的十分之一,實測削減振蕩作用效果明顯。
為了測試模糊適應(yīng)參數(shù)整定PID控制方法在樣機實物讓的控制效果,用直徑1~100 cm大小不等的若干石塊模擬復(fù)雜顛簸路況,在彈藥恒穩(wěn)運輸車的電位器上連接串口發(fā)送模塊,在PC上實時記錄電位器的角度響應(yīng)情況。實際測得兩種控制算法的角度響應(yīng)曲線圖如圖8所示。
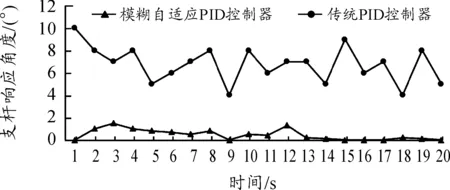
圖8 電位器角度響應(yīng)曲線
通過對實測數(shù)據(jù)分析可知,與傳統(tǒng)PID控制器相比,模糊適應(yīng)參數(shù)整定PID控制器在復(fù)雜的路況下可以使支桿在角度出現(xiàn)極小的偏差下就進行恢復(fù)控制,角度響應(yīng)迅速,控制系統(tǒng)實時性好。
4 結(jié)論
通過對比分析傳統(tǒng)PID控制器和模糊自適應(yīng)參數(shù)整定PID控制器的階躍響應(yīng)圖,可得出:
1) 后者的響應(yīng)速度快于前者約50%,超調(diào)量降低約70%,穩(wěn)態(tài)誤差降低約10%。
2) 在50 ms擾動位置處,后者相較于前者來說基本無波動,100 ms以后傳統(tǒng)PID控制器出現(xiàn)了周期性系統(tǒng)振蕩。通過樣機實測可得出:
1) 模糊自適應(yīng)參數(shù)整定PID控制器中加入的一階低通濾波算法可以將系統(tǒng)運行振蕩減小一個數(shù)量級,使彈藥恒穩(wěn)運輸車運行平穩(wěn)基本無振蕩。
2) 在復(fù)雜路況下,模糊自適應(yīng)參數(shù)整定PID控制器能夠保持很高的角度響應(yīng)速度,很大程度上提高了系統(tǒng)的穩(wěn)定性。因此,在彈藥恒穩(wěn)運輸車上運用模糊自適應(yīng)參數(shù)整定PID控制器可以滿足穩(wěn)定性和快速性的控制要求,魯棒性提高,保證了恒穩(wěn)彈藥運輸車的可靠性和安全性。