用于智能制造工廠中物料搬運機器人的研制
2020-05-16 01:24:14王遠超王嘉琪岳世杰田建濤
湖北農機化 2020年2期
王遠超 王嘉琪 焦 鵬 岳世杰 田建濤
(太原理工大學現代科技學院,山西 太原 030002)
0 引言
隨著經濟的發展,科技發展也越來越快。就中國工業的現狀來看,未來10年,中國工業智能化領域將有高速發展,智能工廠也是必不可少的一部分,傳統的工廠也將會轉型成智能工廠,智能工廠為制造業公司提供了智能化的工廠頂層設計、轉型路徑圖、軟硬件一體化實施的工業智能化解決方案,同時在技術的供應上也有非常大的幫助,包括工業物聯網、工業網絡安全、工業大數據、云計算平臺、MES系統等;智能制造工廠出現,生產模式發生了巨大變化,人工智能和機器人取代傳統勞動力,可以說是時代必然的產物,是未來智能制造中不可或缺的一部分。
1 智能制造工廠的特點
1.1 互聯互通
互聯互通是通過CPS系統將人、物、機器與系統進行連接,以物聯網作為基礎,通過傳感器、RFID、二維碼和無線局域網等實現信息的采集,通過PLC和本地及遠程服務器實現人機界面的交互,在本地服務器和云存儲服務器實現數據讀寫,在ERP、PLM、MES和SCADA等平臺實現無縫對接,從而達到信息的暢通,人機的智能。
1.2 數字化
數字化包含2個方面內容,一方面是指智能工廠在工廠規劃設計、工藝裝備開發及物流等全部應用三維設計與仿真;另一方面,在傳感器、定位識別、數據庫分析等物聯網基礎數字化技術的幫助下,數字化貫穿產品創造價值鏈和智能工廠制造價值網絡,從研發到運營,乃至商業模式也需要數字化的貫通,從某種程度而言數字化的實現程度也成為智能制造戰略成功的關鍵。
1.3 智能供應鏈
智能供應鏈重點包含供應物流、生產物流、整車物流,各相應環節實施物流信息實時采集、同步傳輸、數據共享,并驅動物流設備運行,實現智能物流體系。
2 物料搬運機器人的整體方案設計
2.1 總體方案的設計
小車系統分為四大部分:信號采集部分、數據處理部分,機械臂抓取部分以及行駛控制部分。信號采集部分選用了黑標傳感器,黑標傳感器相對其他傳感器來說更加小巧方便,而且操作程序相對簡單。數據處理部分選用Arduino2560,Arduino2560比單片機更加簡單化,而且Arduino2560有對應的擴展版,更加方便快捷。機械臂抓取部分是由3個270度的伺服舵機來完成工作任務,通過3個舵機的配合,可以在搬運物料的過程中相對穩定地保護物料的“安全”。行駛控制部分是由4個步進電機配合福來輪來完成的行駛,而且步進電機和福來輪的配合更加適應工廠的地面。
下面就是機器人的執行任務流程圖:
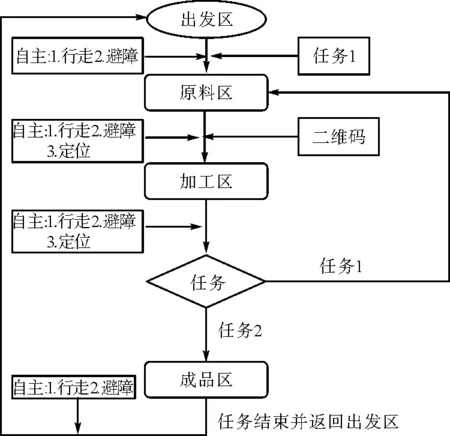
圖1 系統流程圖
2.2 主控板的設計
本文中智能機器人的主控板采用的是Arduino2560為核心的微控制系統開發板,本身具有54組數字I/O端口(其中14組可以作為PWM輸出),16組模擬比輸入端,4組UART串口,供電系統有2種選擇,USB直接供電和外部供電,此控制板的極限電壓范圍為6V~12V。
2.3 器件選擇及功能模塊設計
電器元件選擇一個ArduinoMega2560主控板、Bigfish擴展板、步進電機擴展版、3個270°舵機、4個黑標傳感器、顏色識別傳感器,Wi-Fi模塊。4個黑標傳感器用以判斷地圖上的黑線以此實現小車循跡功能;機械臂用來抓取物料;顏色傳感器用來識別物料顏色;Wi-Fi模塊用來獲取搬運物料的任務。
顏色傳感器的使用方式:把一個白色物體放置在顏色傳感器之下,兩者相距10mm左右,點亮傳感器上的4個白光 LED燈,用Arduino控制器的定時器設置一固定時間 1s,然后選通3種顏色的濾波器,讓被測物體反射光中紅、綠、藍三色光分別通過濾波器,得到的 RGB比例因子,則物體反射光中紅、綠、藍三色光對應的1s內輸出信號脈沖數乘以R、G、B比例因子,就可換算出被測物體的RGB標準值。
以下是行走程序:
delayTracking(Y, time);
linear_v = 0.2; //速度設置為 0.1m/s
while(toDigital(sensor2) || toDigital(sensor3)) trackingY();
switch(i){
case 0: move(0, 0.045, 0); move(0.01, 0, 0); break;
case 1: move(0, 0.045, 0); move(0.01, 0, 0); break;
case 2: move(0, 0.04, 0); break;
以下是顏色識別程序:
//顏色檢測函數
void colorDetect(int i){
#ifdef DEBUG
Serial.println(color_data);
#else
switch(i){
case 0: myScanner1.scan(); break;
case 1: myScanner1.scan(); break;
}
3 機械加工工藝
3.1 機械臂的加工
機械臂的加工主要經過以下流程:選材、用料、切除、鉆孔、打磨、拋光、折彎等步驟,其中切除和鉆孔是最為費事的,選好料之后用筆針先畫上線,然后在銑床上反復來回的切除,直到銑出來模型以后,還要用銼刀把周邊鋁板上的毛刺銼平,然后再比對上舵機的尺寸在鋁板上比劃,用鉚釘在鋁板上釘個小眼,以防銑刀打滑,鉆出孔后還要折彎,最后進行拋光。
以下是機械臂角度的調試和抓取程序:
//底部舵機角度
//0:中間角度
//1:夾取方向角度
//2:放置方向角度
#define SERVO_A_0 88
#define SERVO_A_1 25
#define SERVO_A_2 147
3.2 Wi-Fi技術的應用
當前Wi-Fi技術在人們生活中已經得到了廣泛的應用, Wi-Fi技術的實質是IEEE802.11標準,該技術的信息傳輸速度很快,可以達到500MB/s,基本可以滿足大部分用戶對于數據傳輸的要求。將Wi-Fi技術應用于物料搬運機器人之中,能夠通過互聯網絡實現對物料搬運機器人的遠程控制,而且還能夠在局域網內部對設備進行本地控制。除此之外,物料搬運機器人獲取搬運任務的方式也得到改善,從掃描二維碼獲取任務轉變到了通過Wi-fi獲取搬運任務,既節省了大量的時間,也提高了搬運的數量。Wi-Fi技術的應用使得物料搬運機器人擁有高效率、高精準性的特點。這是新技術應用于制造業中產生的成果。
以下是接入WiFi模塊的程序:
#include
#include
#include ″WiFly.h″
#define UDP_HOST_IP″255.255.255.255″// broadcast
#define SSID ″Your-SSID″
#define KEY″passphrase″
// Arduino WiFly
//2<——>TX
//3<——>RX
WiFly wifly(2, 3);
HTTPClient http;
char get;
4 結論
物料搬運機器人促進了智能制造工廠的升級和不斷進步,為我國制造業的發展和經濟水平的提升做出了貢獻。同時為了實現智能制造工廠的進一步優化,在未來還需要加強對物料搬運機器人技術的完善和發展,從而實現制造業的創新和高質量發展。
猜你喜歡
物流技術與應用(2020年11期)2020-03-11 03:11:36
表面工程與再制造(2019年6期)2019-08-24 06:40:04
汽車觀察(2018年12期)2018-12-26 01:05:44
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
消費導刊(2018年8期)2018-05-25 13:20:16
現代企業(2015年2期)2015-02-28 18:45:09
