LNG槽車公路橫向穩定性研究現狀
2020-05-12 09:07:26李夢瑩丁克勤孔松濤
化工裝備技術 2020年2期
游 赟* 李夢瑩 梁 平 丁克勤 孔松濤
(1. 重慶科技學院 2. 中國特種設備檢測技術研究院)
0 前言
液化天然氣(LNG)槽車的經濟性和靈活性較好,所以成為了地面運輸LNG 產品的主要工具。槽車本身質量較大,質心位置偏高,在運輸過程中罐內液體流動性較強,當槽車的運動狀態發生改變(如通過彎道等地形)時,罐內液體的質心會發生偏移,從而使槽車的橫向穩定性顯著下降,導致其發生橫向翻傾。
為了防止槽車在運輸過程中發生事故,大多研究是根據以往經驗從槽車的設計方面來增加穩定性和提高安全性。近年來,隨著計算機技術以及衛星定位技術的日趨成熟,企業對槽車安全性能的要求也越來越高。通過相應的程序和設備對罐車的運行狀態以及罐體的各項參數進行高速、實時和有效采集并進行數據處理,同時結合實時道路狀況進行分析,可以對行駛在危險路段的槽車發出預警信號[1-2]。該技術可以實現槽車智能化監測目標,甚至能有效防止車輛傾翻以及LNG 泄漏等交通事故發生。
總而言之,車輛穩定性的研究主要可以分為兩個部分:第一部分是車輛經過彎道時的抗傾覆能力,主要影響因素是車速與轉彎半徑之間的關系以及加速度控制;第二部分是結合實時路況信息對相應車輛的側滑能力結出實時評價。
與普通公路車輛不同,槽車運輸罐內的大量液體在轉向過程中會產生不可控制的橫向晃動,對車輛的穩定性產生嚴重影響。大多學者對車輛的側傾穩定性進行了研究,主要研究方式包括現場試驗、理論分析和數值模擬等[3]。
1 槽車橫向穩定性影響因素
影響車輛穩定性的因素較多,包括道路路況、駕駛員操作情況、貨物裝載情況以及車輛自身狀況等,這些因素都可能導致車輛發生側滑或側翻事故。
行駛道路的路面狀況是其中的關鍵因素,例如由于天氣原因道路上有水或者路面結冰,道路本身不平整或者有轉角較大的彎道、坡道等路況都會影響車輛行駛。另外,當罐內的LNG 液體晃動時會使槽車兩側受力不均衡,降低槽車的穩定性。
當有水平外力作用在行駛中的車輛上時(如大風等),其穩定性會顯著下降。當風向與車輛行駛方向平行(如順風和逆風)時,車速和制動距離會受到影響;而風向與行駛方向垂直則會影響其橫向穩定性。
胡朋等[4]在考慮路面平整度的條件下,對車輛橫向穩定性的臨界風速進行了計算。他們認為,影響車輛橫向穩定性的臨界風速與車速和道路摩擦系數密切相關,后者的影響更為顯著。
梁樹星[5]從力學角度分析了車輛的側滑和側翻現象并分別提出了相應的預防方法。他認為車輛側滑主要是因為在轉彎過程中,地面與車輛之間的摩擦力小于車輛安全轉彎所需要的向心力。因此,只能通過減速或者增大轉彎半徑來確保車輛轉彎時的安全性。同時他也指出了車輛軸距和重心高度是影響車輛側翻穩定性的重要因素。
孫川等[6]通過采用動力學仿真軟件Simulink 與TruckSim 進行聯合仿真實驗,對現行規范中規定的典型彎道進行了行駛安全性評價。其研究表明,為了提高車輛轉彎時的穩定性,必須降低車速,增大道路轉彎半徑。
2 側翻預警研究現狀
在現代汽車的穩定性控制系統中,車輛動力學控制系統是比較典型的控制系統。該系統將車輛的實際情況與理論分析的差異反饋給中控,通過輪間差動控制及調整發動機運行來控制車輛的橫擺運動[7-8]。
車輛在轉彎時需要控制其穩定性,常用的轉彎穩定性控制方法主要是控制橫擺角速度偏差值的閾值和PID 控制,PID 控制是通過輸出橫向加速度、橫擺角速度以及側偏角參數反饋來控制車輛穩定性。
劉彩志等[9-10]認為確保車輛轉彎時的穩定性必須同時控制橫擺角速度和側偏角,因為從車輛的動力性測驗中發現其橫擺角速度和橫向加速度并不對應。為此,祁永寧等[11]綜合分析考慮了直接橫擺力矩控制和四輪轉向控制方法對維持車輛穩定性的作用效果,在此基礎上建立的理想車輛模型在側偏角和橫擺角速度的參數輸出響應上表現良好,在研究中進一步選用結合了前饋和反饋兩種控制過程的控制策略,得到了表現最優的控制器,有效減少了駕駛員操作流程,提高了車輛的穩定性。
槽車裝載的介質是液體,因此槽車的質心位置會由于車輛轉彎或緊急制動等運動狀態改變導致液體擺動而不斷產生變化,這對車輛安全穩定行駛極其不利。質心側偏角主要用于反映車輛行駛時的漂移情況,其定義是指車質心速度與車速之間的夾角。質心側偏角也是影響車輛穩定性的重要因素,如圖1 所示。
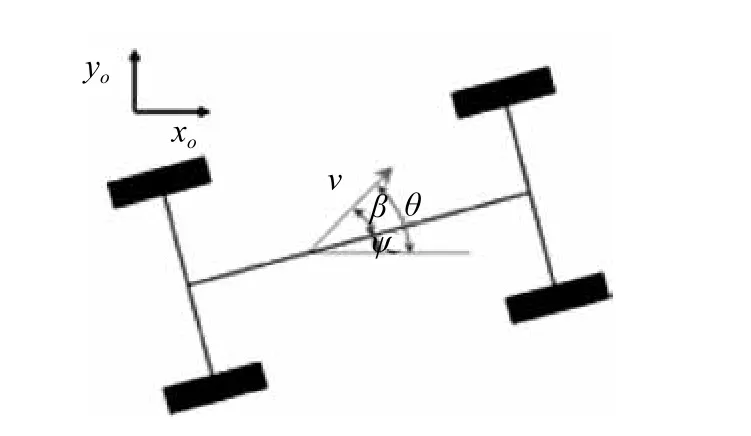
圖 1 航向角θ、質心側偏角β與橫擺角ψ關系
目前,質心側偏角的估計方法根據原理不同大致可分為兩大類:一類是以動力學為基礎的估計方法,該估計方法對傳感器的要求不高,成本較低,因此被廣泛應用[12];另一類是基于運動學的估計方法,該方法是基于車輛電子穩定控制系統標準傳感器配置而實現的。
在車輛的各種側翻指標中,橫向荷載轉移率(LTR)是較為可靠的指標[13],其定義為:

式中:FL——左側輪胎所受的垂直于地面的載荷;
FR——右側輪胎所受的垂直于地面的載荷。
在車輛側傾過程中,LTR 隨著側傾狀態的改變而變化,LTR 的絕對值為0~1。當LTR=0 時,表示車輛狀況良好,沒有發生側翻;當LTR=1 時,表示車輛處于極限狀況,存在發生側翻的可能性。
賀宜等[14]通過LTR 值定量分析路面附著系數對車輛橫向穩定性的影響后得到,一定范圍內路面附著系數減小有利于維持車輛穩定。當路面附著系數增加到0.75 時,車輛在該路面上發生側翻的可能性大大增加;而當該系數降低到0.7 以下時,車輛發生側翻的可能性急驟減小;當該系數小于0.4 時,車輛側翻的可能性幾乎為0。
3 側滑預警研究現狀
運用建模方法對車輛側滑進行分析研究時,陳銘年[15]得到了運輸罐罐體橫截面為橢圓類形狀的運輸車輛彎道行駛的特性,如圖2 所示。
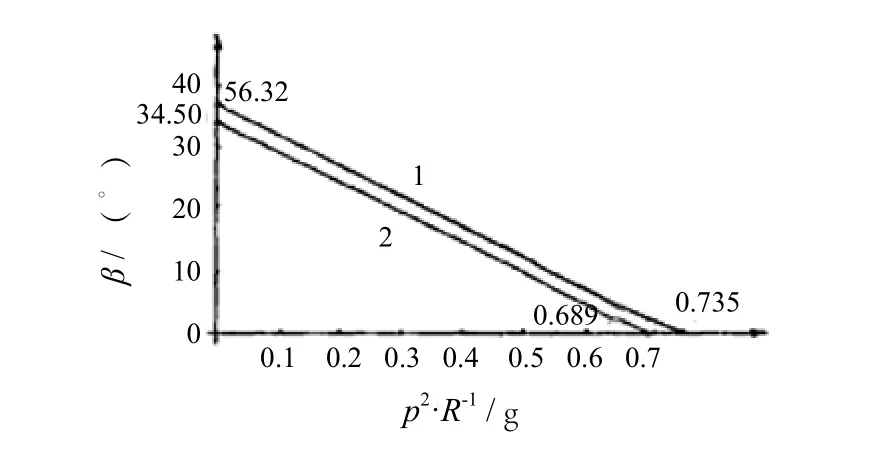
圖 2 橫向穩定性特性曲線
圖2 中兩條橫向特性曲線1 和2 與坐標軸圍成的封閉區域即為車輛橫向穩定區域。
黃智等[16]采用在轉向系統中常用的可調節增益并參考模型中基于滑模跟蹤的相應控制模塊,將控制器的控制目標對象限定為橫擺角速度和側滑速度,通過控制驅動力分別作用在左輪和右輪上,直接生成橫擺力矩來克服或減弱側滑的影響,明顯提高了車輛在極限狀態時的操縱穩定性。
賀宜等[14]也在車輛穩定性研究中通過側滑穩定性指標EG(Engle-Granger)來分析路面附著系數對車輛側滑穩定性的影響,他們認為路面附著系數越小越不利于車輛側滑穩定性。當系數小于0.4 時,行駛車輛容易發生失控側滑等情況。
許金良等[17]通過Adams/Car 仿真系統對載重汽車在高速公路彎道和坡道組合路段進行緊急制動的仿真模擬,得到載重汽車各個位置上輪胎的瞬時受力狀態及其變化趨勢并進行了分析,研究載重汽車在坡道路段及彎道上行駛時的受力情況,完善了車輛瞬態響應模型,分析了危險路段事故多發原因,提出了通過避免緊急制動、提前減速來保證車輛行駛安全。
鄒鐵方等[18]利用基于經典力學模型的PC-Crash事故分析軟件仿真模擬了車輛發生側滑事故的全過程,并引入新的仿真參數明確具體步驟,得到了一種車輛側滑事故的仿真再現新方法。該方法通過對事故車輛的側滑過程進行全程仿真模擬,進而得到側滑車輛處于碰撞前一瞬間的各類實時運動狀態參數,并演示了該分步再現方法中各步驟的具體實現途徑,使軟件仿真再現結果中的痕跡與實際行車情況基本一致,如圖3 所示。
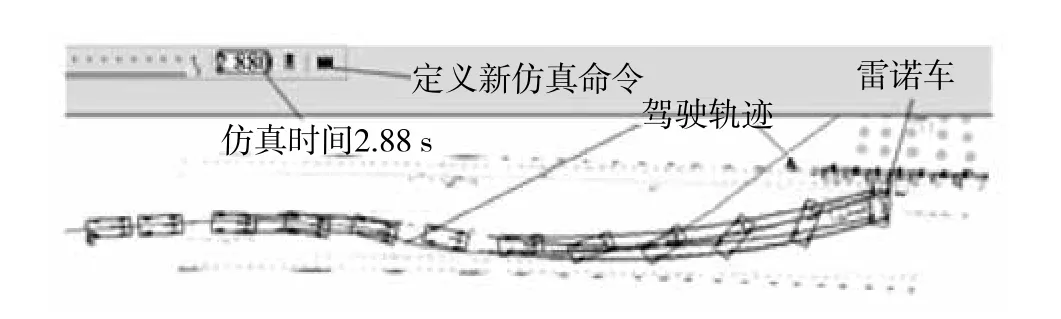
圖 3 仿真中側滑車軌跡
張德兆等[19]首先將單回旋線道路曲率模型與多個傳感器的實時信息結合,估計出行駛車輛前方道路的實時曲率,再綜合駕駛員的操作特性、行駛車輛實時狀態及性能等參數計算得到彎道行駛的極限安全車速。在此基礎上引入風險狀態評價值R,對車輛在彎道路段行駛時的實時穩定性進行分析判斷,可以實現駕駛預警的目的,顯著提高了行車安全性。忽略車輛側翻事故,僅對車輛被甩出道路的側滑行駛工況來進行彎道防側滑超速報警,此時R 可由下式確定:

式中:G——危險事件所占的權重,出于安全考慮預留出一定的安全余量,取G=1;
P——危險事件發生的概率。
P 可以由下式計算得到:

根據風險狀態預估值R 的大小分級別對通過彎道時的車輛駕駛員進行彎道防側滑超速報警提示。當R<0.5時,在該系統中設置為不報警;當0.5≤R<0.9時,設置為初級報警;當R ≥0.9 時,設置為高級報警。
陳輝等[20]建立了側向平衡方程以及整車轉向模型,并引入側滑余量和側翻余量這兩個參數來判定車輛側滑和側翻的順序,進而分析了重載車輛在轉向過程中的穩定性。并進一步分析了重載車輛橫向穩定性與路面靜摩擦系數之間的定性關系,在衡量車輛穩態轉向過程中的側向平衡性能時,側滑余量以及側翻余量這兩個參數具有重要的作用。
對實際工程中重載車輛的轉彎特性參數分別進行仿真模擬并得出以下結論:在滿載系統中橫擺以及側傾慣性積參數的改變會導致系統穩定性發生相應變化;路面靜摩擦系數與側滑余量呈正相關,車輛質心高寬比(質心高度與輪距之比)與側翻余量呈負相關,兩個參數均會影響車輛的側翻穩定性。
從發展方向上看,基于GPS 技術和4G 無線網絡通信技術的罐車運輸途中實時監控系統能夠維持車輛運行的穩定性,全方位對罐車運行途中的狀態和罐體狀態進行實時、有效地定位和監測。監控中心可以隨時查看罐車運行狀態和罐體的各項參數,通過多傳感器數據融合方法進行分析,對潛在的危險情況進行分級別預警,確保罐車運行安全,大幅提升了槽車行駛的安全性。此外,還能減輕駕駛員的操作負擔,對于降低事故發生率及增強車輛行駛過程中的安全性具有重要意義。
4 結論
指出了槽車不同于其他重載車輛的特點,由于液體的流動性導致槽車具有公路上行駛的特殊性和事故發生的高危險性。
路面狀況、裝載狀況、車輛自身狀況和外界環境導致的外力都是影響槽車橫向穩定性的因素。
對槽車側翻和側滑的預警研究現狀進行了分析。提出了通過GPS 衛星定位和4G 無線網絡通信技術對公路槽車在途實時監控將會是以后發展趨勢。