在他勵直流電動機四象限運行的實驗中訓練工科學生的工程綜合能力
2020-05-09 13:43:40黎群輝王擊
科教導刊·電子版 2020年1期
黎群輝 王擊


摘 要 本文論述了在他勵直流電動機四象限運行的實驗中訓練工科學生的工程綜合能力的問題,給出了他勵直流電動機在各種運行狀態下的電磁轉矩T、轉速n、電樞電流Ia、電勢E、電壓平衡方程式及符號的確定和應用場合比較表,就電機在各象限運行時對學生能力的考察闡明了自己的觀點。
關鍵詞 他勵 直流電動機 四象限 綜合能力
中圖分類號:G642文獻標識碼:A
0引言
他勵直流電機機械特性的四象限運行實驗,是高校自動化專業、電氣工程專業、機電專業、測量與控制等專業的本科生對應的《電機學》和《電機與電力拖動基礎》課程的一次大型綜合性實驗,是對學生在電機拖動的動手能力上的一次大檢閱,要求實驗者能綜合的運用電機與拖動方面的理論知識完成實際操作,并通過實驗進一步加深對所學理論知識的理解和掌握。同時,在實驗的基本方法和綜合技能上得到全方位的鍛煉,最終達到利用所學知識解決較復雜的工程實際問題能力。
(1)什么是他勵直流電機四象限運行的機械特性?如何運用直流電機機械特性所在的四個象限分析和判斷電機的運行狀態?
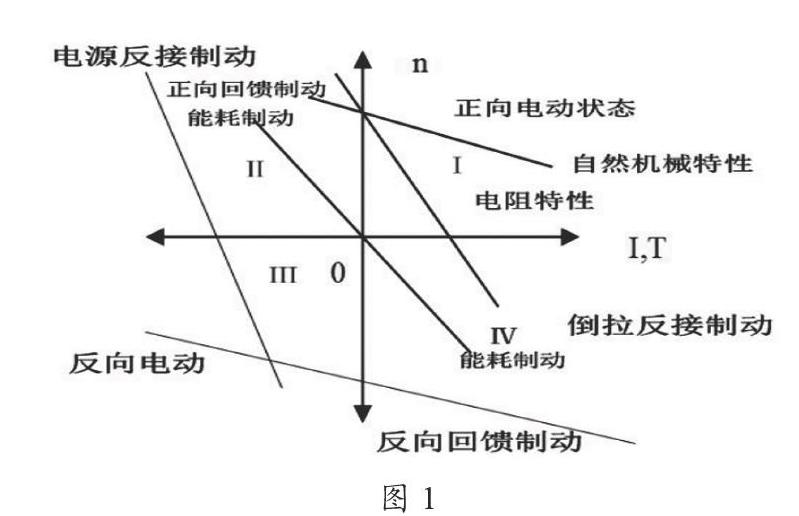
接觸過直流電機的一般都知道,直流電機的工作原理是以導體在磁場中運動產生感應電動勢和載流導體在磁場中受力為基礎來實現機電能量轉換的。同一臺直流電機之所以既可作直流發電機運行(將機械能轉換為電能),也可作直流電動機運行(將電能轉換為機械能),是因為直流電機具有換向器這個特殊結構。又因為根據勵磁方式的不同,直流電機可分為:串勵、并勵、他勵和復勵四種形式(當然,復勵又可分為分積復勵和差復勵)。所謂他勵直流電動機,是指直流電動機的勵磁回路由獨立的直流電源供電。而他勵直流電機的機械特性是根據轉矩、電勢、電壓平衡方程式推導出來的,其機械特性方程式一般形式為:,在平面坐標系中,如果用X軸代表轉矩(),Y軸代表電機轉速(),電磁轉矩()與轉速()的關系就是電機的機械特性。他勵直流電機機械特性曲線所在的四象限分別代表直流電機的4種不同運行狀態,如圖1:第Ⅰ、Ⅲ象限分別代表電機的正、反向電動運行狀態;第Ⅱ、Ⅳ象限分別代表電機的正、反向回饋制動狀態。
機械特性如果從第Ⅱ象限運行到第象Ⅲ限則代表電機處于電源反接的制動狀態,如果從第Ⅱ象限運行到第Ⅳ象限穿過坐標原點,必為能耗制動狀態。如果從第Ⅰ象限運行到第Ⅳ象限,則電機從正向電動運行過渡到電勢反接(倒拉反接)的制動運行狀態。
(2)他勵直流電動機在各種運行狀態下的電磁轉矩T、轉速n、電樞電流Ia、電勢E、電壓平衡方程式及符號的確定和應用場合比較如表1如示。
(3)他勵直流電動機在各象限運行時對學生工程能力的綜合考察。
①他勵直流電動機在第Ⅰ、Ⅲ象限運行時對學生工程能力的考察。
第Ⅰ、Ⅲ象限代表電動機的正、反向電動運行狀態。
直流電動機(無論他勵還是并勵)在第Ⅰ、Ⅲ象限運行時,主要考察學生對直流電動機正、反向的啟動和調速方法的掌握及自然機械特性、人為機械特性曲線(電阻特性)的求取。
直流電動機啟動方法的考察。直流電動機的啟動方法是工科機電類專業學生必須掌握的基本技能。直流電動機是不允許直接啟動的,因為啟動的瞬間,n=0,E=0,加上電動機電樞繞組的固有電阻很小,因而啟動電流Ist會很大,這既對電網不利,也會使電動機換向器火花增大,如果直接啟動,電動機的電樞繞組幾乎處于短路狀態,瞬間燒毀電機。所以,啟動前電樞回路必須串接電阻(也就是說,啟動前,須將電樞回路所串接的啟動電阻調至最大,而不應該將它調至最小),啟動時必須限制它的啟動電流在額定電流范圍內。
與此同時,直流電動機必須滿磁啟動,啟動前,必須確保電動機的勵磁回路接通勵磁電源,且勵磁回路處于滿磁狀態,之所以這樣,是為了防止電機啟動后轉速過高,造成飛車。為達到此目的,可以在啟動前,在勵磁回路中串接一個量程較少直流電流表(一般用毫安表)來觀察勵磁回路是否滿磁,如果在啟動前,勵磁回路處于開路狀態(斷線),勵磁電流毫安表的讀數為零,電機是啟動不了的,但是一旦啟動起來后,由于某種原因造成勵磁回路開路,也就是說勵磁電流為零,理論講,電機轉速將趨于無窮大(飛車事故),現實中的感受是:電機的轉速將非常非常高,會讓人毛骨悚然,極其恐怖,會讓人感覺世界末日將要來臨。嚴重的飛車,會導致甩膛事故發生。
所以,直流電動機在啟動之前,必須作好充分準備:滿磁啟動,且電樞回路中必須串電阻啟動。這是實驗者必須掌握的最基本也是最重要的知識點和和必備的操作能力。
調速方法和機械特性測試能力的考察。直流電動機具有良好的調速性能,其調速方式有:調壓調速,串電阻調速和弱磁升速三種。由于調壓調速可以在額定轉速范圍內實現平滑無級調速,調壓時機械特性硬度不變,調速的穩定度較高,調速范圍較大,恒轉矩調速,所以應用最廣。而弱磁調速是在額定轉速以上的平滑無級調速(升速),其調速范圍不大,因為普通他勵直流電動機的高轉速不得超過額定轉速的1.2倍,所以,弱磁調速很少單獨采用,但有時為了擴大調速范圍,就將它和調壓調速配合使用,即在額定轉速以下,用降壓調速,而在額定轉速以上,用弱磁調速。因為電樞回路中串電阻調速需外接大功率電阻,功率損耗大、電阻器體積也大、笨重,低速運行時穩定性又較差,不能實現無級調速等諸多缺點,所以,在大功率電機的調速中現已很少采用串電阻調速這種方式。
直流電動機的調速與直流電動機機械特性有著密切的聯系。直流電動機的機械特性有自然的(固有的)機械特性和人為(串電阻)的機械特性兩種,前者是反映在電樞回路中不串電阻情況下所測得的特性,體現的是隨著負載的變化(電磁轉矩的變化),轉速的變化情況,但直流電機在啟動時是必須要串接電阻的,只不過啟動起來后,須將電樞回路中的電阻全部切除(調為零),才算啟動完畢。在此之后,所測得數據才是自然機械特性數據。要測取人為的特性曲線,必須在電樞回路中串接電阻,所以,其機械特性又叫電阻特性,是一簇通過理想空載轉速點直線,串入的電阻越大,機械特性越軟。以上是對實驗者調速方法和機械特性的能力考察。
②他勵直流電動機在第Ⅱ、Ⅳ象限運行時對學生工程能力的考察。
在第Ⅱ、Ⅳ象限運行的直流電動機,其機械特性反映了它的制動運行狀態,主要考察學生對各種制動方法的掌握及各種方法優缺點和應用場所的理解。
所謂制動,是指在電動機的軸上加一個與旋轉方向相反的轉矩,以達到機組快速停轉,或限制機組的轉速在一定的數值內,如電車下坡、重物下放等。在他勵直流電動機中,因磁通的方向恒定不變,從可知,可以用改變電樞電流的方向來改變電磁轉矩的方向。因為,所以,有三種方法可以改變的方向。
切除電源電壓,電樞經外電阻短路,即:,即為能耗制動。由于能耗制動時,,,這時的機械特性方程式變為:,電流和電磁轉矩都與原來電動機運行狀態時的方向相反,即轉速方向未變,電流和電磁轉矩的方向為負,故機械特性在第二象限為過原點的一條直線。
如果,則, 即,稱為回饋制動,回饋制動又叫再生制動,如電車下坡時,其位能驅使電機升速,當時,,此時的電樞電流改變方向,電磁轉矩反向起制動作用,限制轉速上升。此時電機轉變為發電機狀態,將電車下坡時失去的位能轉變為電能回饋給電網,如上圖1所示,回饋制動的機械特性為穿過理想空載轉速點的直線。
將電源電壓改變方向,并串入限流電阻,即,此仍反接制動。
當電源經過反向開關反接時,加到電樞兩端的電壓極性與電動機運行時相反。由于磁場和轉向不變(),電勢方向未變,所以和方向相同,此時變為負值,電磁轉矩改變方向成為制動轉矩。電機的轉速從n1下降至零,電機停轉。機械特性曲線會在第二象限出現。當工作機械為阻力負載時,電動機反轉,機械特性曲線進入第三象限,其穩定轉速為-n1。即:電源反接過程的機械特性位于第二象限,反接的瞬間,電樞兩端電壓為,所以必須串入限流電阻,以限制電樞電流,通常限制電樞電流小于兩倍額定電流,即:這是實驗過程中必須注意的地方。還有要值得注意的地方就是:電源反接與倒拉反接不同,前者的特點是,U改變方向和Ea方向相同,然后電流Ia和轉矩T的方向改變(第二象限)。而調速中因位能性負載所引起的倒拉反接制動的特點是,電勢Ea改變方向和U方向相同,而電流Ia和T的方向未變,但轉向改變。機械特性位于第四象限,這是因為電樞回路串入電阻較大,此時轉速降故轉速n為負值。
電動機的反轉。在電力拖動裝置工作過程中,根據生產的要求,常常需要改變電動機的轉向。改變電動機轉矩方向的方法有兩種:一是將電樞繞組反接,其二是將勵磁繞組反接,由于勵磁繞組匝數較多,電感較大,反向勵磁的建立過程緩慢,從而使反接過程不能迅速進行,所以通常采用反接電樞繞組的方法使電機反轉。如果電動機正轉,轉矩和轉速的方向為正,那么反轉時,轉矩和轉速應為負,因此他勵直流電動機反轉電動狀態的機械特性位于第三象限內,反轉回饋制動狀態的機械特性應該在第四象限內。
結論
四象限運行是電流、電勢的換向過程和電動機的電動、制動過程的轉換;電動機在各種
運行狀態下的電磁轉矩、負載轉矩、轉速、電樞電流和電勢等符號的確定是考察實驗者綜合能力的一個重要方面。回饋制動、反接制動的能量傳遞關系,電動勢平衡方程式的表示,直流電動機啟動、調速和制動的各種方法的掌握及各種方法優缺點和應用場所的理解等,都是重要的考察內容。實驗過程中,要求實驗者一氣呵成,將電機四個象限的特性曲線通過實驗測試并正確地繪制出來。
參考文獻
[1] 彭鴻才.電機原理及拖動(第3版)[M].機械工業出版社,2017.
[2] 李發海.電機學(第五版)[M].科學出版社,2019.