基于人體參數的被動步行機器人模型及其運動特性分析
2020-05-09 11:57:20倪國林
機械與電子 2020年4期
關鍵詞:模型
樓 飛,沈 巍,關 靜,倪國林
(南京師范大學中北學院,江蘇 鎮江 212300)
0 引言
被動步行機器人因其具有高效,自然的行走步態,開始成為“仿人”步行領域的一大研究熱點。這種獨特的行走模式有利于深入揭示人類步行機理,并為助步設備的研制提供了新的思路。從90年代McGeer最早提出的對稱二維被動步行機器人結構開始,到如今康奈爾大學的“Steven”,代爾夫特大學的“Denise”,吉林大學的“PADW-JL”一代、二代等形形色色的被動步行機器人,諸多國內外高校對被動力學在仿人步行中應用的研究正在如火如荼地開展。然而,目前對被動步行機器人的研究,大都是從如何讓它具備更高的局部穩定性和魯棒性的角度出發,以穩定性分析的結果作為參數優化的依據。通過這種方式得到的被動步行機器人模型對行走初值敏感度較低,同時具備一定的抗干擾能力。但是,這種機器人結構的“仿人”程度有限,離走向實用化階段還有距離[1-3]。
隨著科學技術蓬勃發展,從20世紀60年代開始,通用電氣公司最先開始從事外骨骼技術的研究[3]。到如今,諸多國內外科研機構、高校、企業對用于康復治療或是提升自身能力的助步設備展開了深入的研究。然而這些以外骨骼形式進行穿戴的助步設備,和主動式步行機器人類似,需要對每個關節進行主動控制。這種結構難免會存在效率低,控制復雜,續航能力差的缺陷[4-5]。
本文從實用化的角度出發,著眼于開發被動式助步設備的創意,旨在發掘被動力學在仿人步行領域的應用價值。創新性地提出一種基于人體參數的被動步行機器人動力學模型,并進行求解和分析。最后,根據實際需要,設計一套高度仿人的被動步行機器人三維模型。這種基于人體參數的被動步行機器人,充分利用了被動力學相關原理,有助于實現一種高效,節能,控制簡便的助步設備[6]。
1 機械系統整體設計
1.1 人體參數模型
目前,可以通過CT掃描和圖像測算的方法得到較為準確的人體特征參數。歸納總結已有文獻,可以得出身高為172 cm(取平均身高),體重為65 kg的中國男性人體參數模型,相關參數如表1所示。
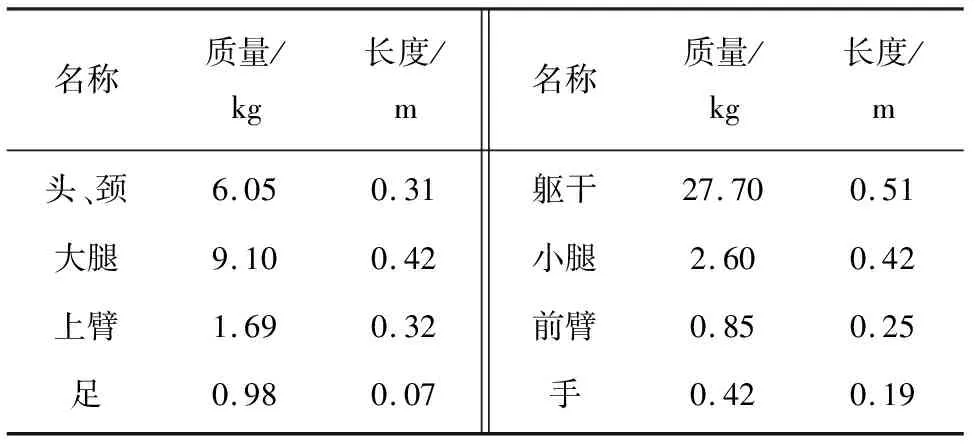
表1 人體各個體段相關數據表
1.2 被動步行機器人參數模型
結合人體參數模型,提出一種包含膝關節、手臂、軀干的被動步行機器人模型。該模型用于指導后面章節中動力學建模與分析,以及機械系統詳細設計的進行。如圖1所示,是被動步行機器人機械系統整體設計示意圖。
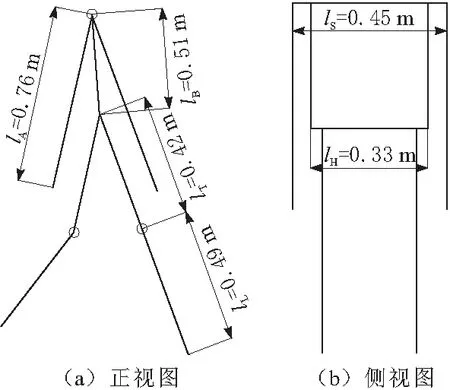
圖1 被動步行機器人整體設計示意
由圖1可知,基于人體參數的被動步行機器人是一個結構簡單的7桿模型。其中字母代號的含義為:A為手臂;B為軀干;T為大腿;L為小腿;S為肩寬;H為髖寬。考慮到被動步行機器人設計的初衷(為助步設備的研制提供新創意),同時為了限制系統自由度個數,將人體參數模型中的部分體段進行合并。其中包括:上臂、前臂和手進行合并;頭、頸忽略;小腿和足進行合并。除此之外,將手臂的運動和異側大腿的運動進行耦合,軀干的運動始終保持在大腿的角平分線上。整個系統只有髖關節和2個膝關節,共3個自由旋轉副。
2 動力學建模與分析
在被動步行機器人動力學建模方面,拉格朗日法一直受到青睞。它從能量的角度出發,結合狀態變量,能夠構建出形式規整的動力學模型。但是,針對多自由度系統構建動力學方程的過程中,需要對狀態變量及其導數求偏導,這里的計算和推導過程十分繁雜,且不利于使用計算機編程。鑒于以上原因,本文將采用空間算子代數相關理論[7]構建動力學模型,并進行局部穩定性分析。以此來探究這種被動步行相關理論能否應用于助步設備的研制中。
2.1 動力學建模
動力學建模的行走模型如圖2所示。針對圖2和動力學建模中的假設,有幾點說明如下。
a.如圖2b所示,根據行走狀態的不同,將行走過程分為4個相態。從相態1到相態4分別為:3自由擺動狀態,膝關節鎖合狀態,2自由度擺動狀態和足-地碰撞狀態。
b.采用空間算子代數的方法進行動力學建模,依照D-H法相關原則構建坐標系。如圖2a所示,∑I為慣性坐標系,∑i為參考坐標系。剛體的標號采用逆向標注的原則:基座的標號為n+1,與基座相連的剛體為n,末端剛體的標號為1,末端執行器端點為0。
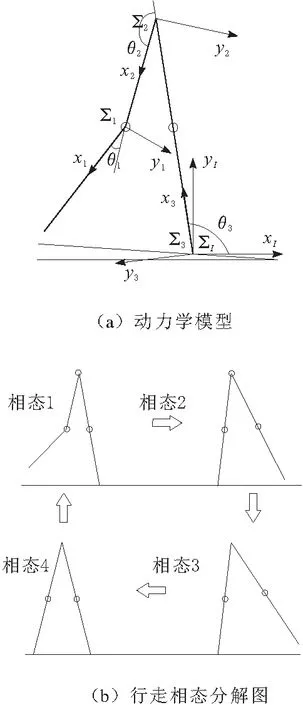
圖2 被動步行機器人行走模型
2.1.1 擺動相態動力學建模
根據空間算子代數相關理論,將遞推算法引入到動力學建模的過程中。避開了繁雜的推導過程,且有利于計算機編程,提高了求解效率,基本算子如表2所示。
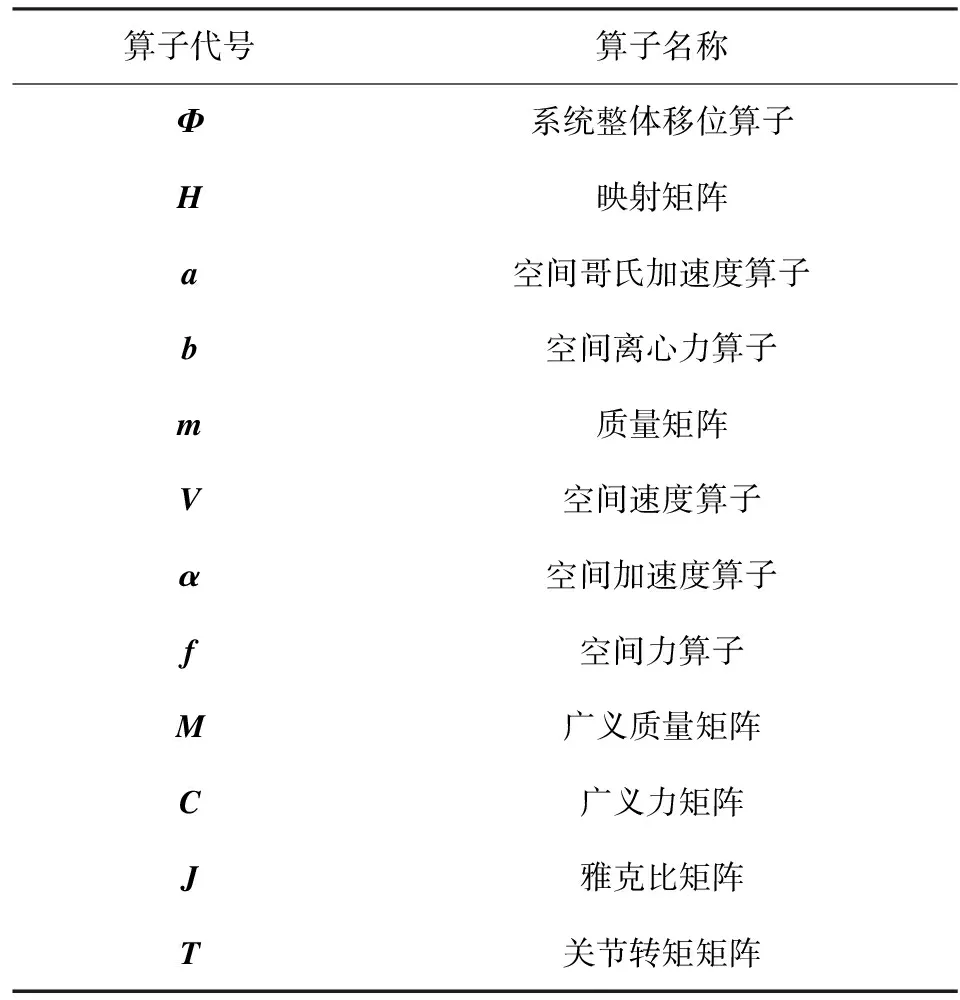
表2 部分基本空間算子簡述
空間速度遞推表達式為
(1)
空間加速度遞推表達式為
(2)
空間力遞推表達式為
f(n)=Φ(n,n-1)f(n-1)+m(n)α(n)+b(n)
(3)
由于受篇幅限制,具體的求解過程就不再詳述,讀者可根據文獻[8]自行推導。
最終通過構建相應的空間算子能夠得到動力學方程的標準形式為
(4)
2.1.2 碰撞相態動力學建模
利用角動量守恒定律,建立碰撞相態的動力學模型。
膝關節碰撞相態。系統相對于足地接觸點O1,擺動腿相對于髖關節H的動量矩守恒,用L及下標表示相態矩陣,則
(5)
足地碰撞相態。系統相對于足地接觸點O2,擺動腿相對于髖關節H,擺動腿小腿相對于膝關節K的動量矩守恒,用L及下標表示相態矩陣,則
(6)
式(5)和式(6)中的上標“+”和“-”分別代表對應狀態變量在撞前瞬間和碰撞后瞬間。
2.2 運動特性分析
被動步行機器人能否進行穩定步行,是考量其實用性的重要指標。在動力學建模的基礎上建立龐卡萊映射函數,結合牛頓-拉夫遜迭代法則,求解不動點x,并構建不動點x處的雅克比矩陣J(x)。最終利用floquet乘子法[9]來求證該被動步行機器人是否具有穩定步行的能力(具有局部穩定性[10])。整個運動特性分析流程如圖3所示。雅克比矩陣J(x)如式(7)所示。
(7)
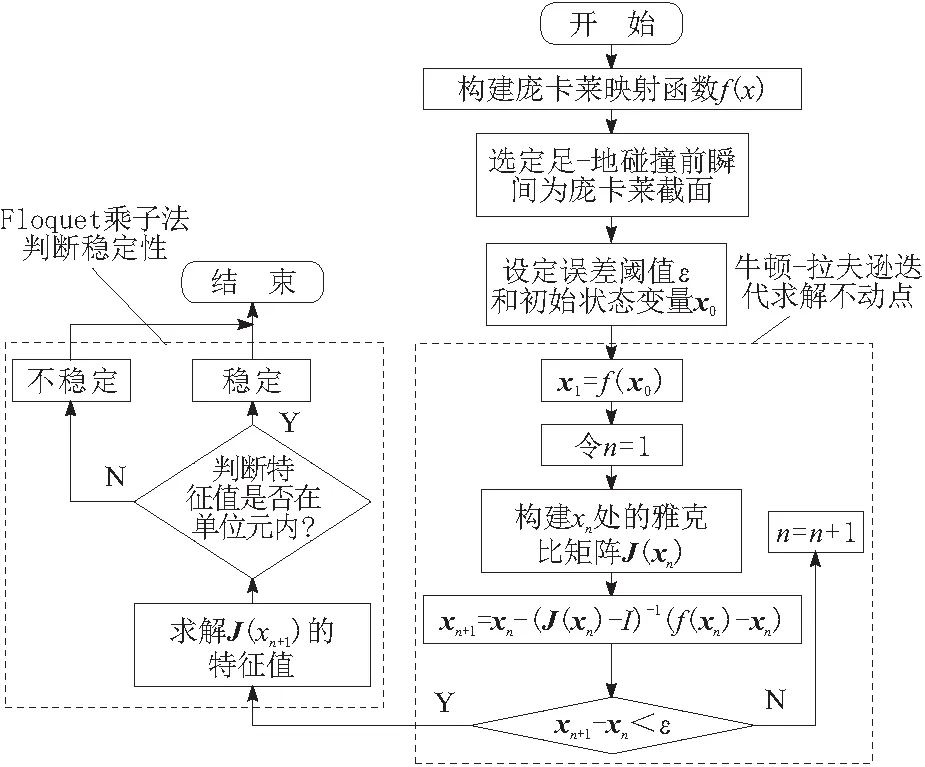
圖3 運動特性分析流程
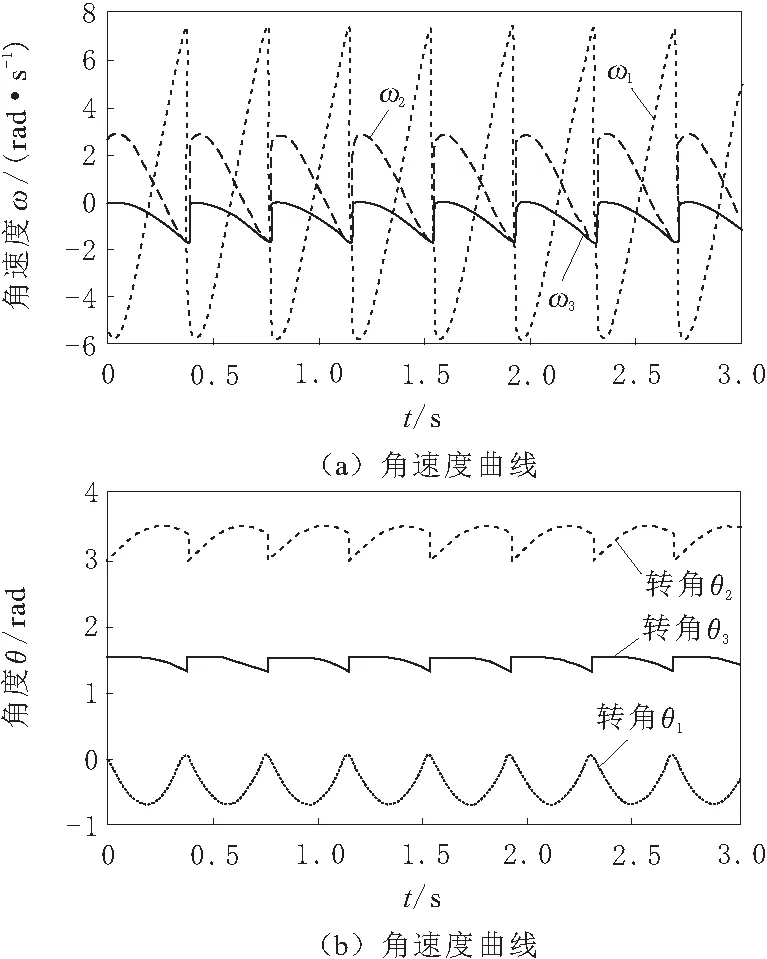
圖4 運動特性曲線
從圖4可以看出,該被動步行機器人以不動點為初始條件,能夠以一個穩定的周期進行被動步行,不存在周期分岔現象。
3 機械系統詳細設計
通過前面章節的分析,可以初步認定基于人體參數的被動步行機器人能夠實現穩定行走。然而,動力學建模和分析是在理想情況下進行的,和實際情況具有差距。為了進一步將“被動力學”的應用價值體現出來,需要對這種基于人體參數的被動步行機器人進行機械系統詳細設計,為虛擬樣機仿真實驗提供便利。根據圖1整體設計的理念,本文將被動步行機器人的設計過程分為髖關節設計、膝關節設計、踝關節設計、足部設計和總裝。
3.1 髖關節設計
軀干的引入能夠增加被動步行機器人行走的穩定性。為了不增加額外的自由度,將軀干的運動限制在大腿夾角的角平分線上。與此同時,引入手臂除了提高仿人程度,還具有增加行走平衡性,削弱偏航的作用。手臂的運動和異側大腿的運動應該保持一致。為了實現以上功能,需要設計一種集成“角平分機構”和“大腿-手臂耦合機構”的髖關節結構。髖關節機械系統如圖5所示。
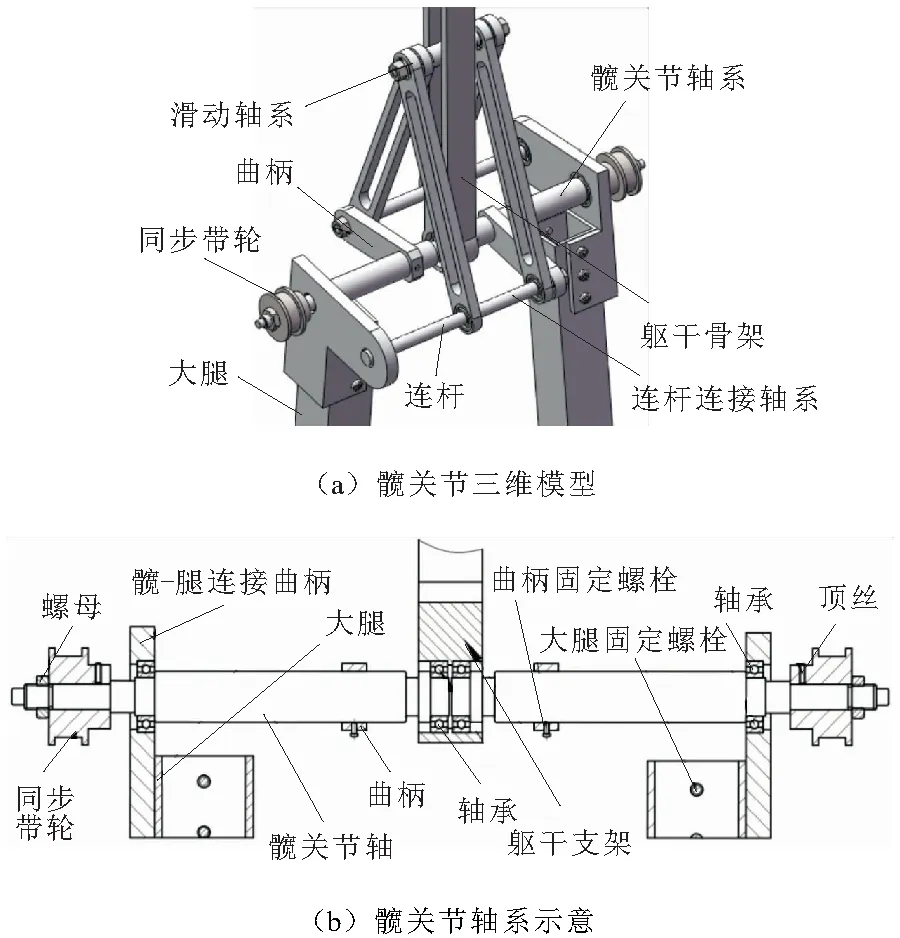
圖5 髖關節機械系統
被動步行機器人髖關節的三維模型如圖5a所示。由圖5a可以看出,該機構通過2組曲柄滑塊機構聯動的方式將軀干的運動限定在大腿的夾角平分線上。如圖5b所示,髖關節軸系由2根斷開的髖關節軸組成,髖-腿連接曲柄可以繞髖關節軸旋轉,通過連桿軸系和曲柄連接。曲柄和髖關節軸固連,將一側大腿的運動傳遞到另一側的髖關節軸上。髖關節軸上固連1個同步帶輪,該同步帶輪會帶動和手臂軸固連的同步帶輪轉動,從而實現和手臂運動的耦合。
3.2 膝關節設計
根據圖2b,被動步行機器人行走相態分解圖可以明確,穩定的行走狀態需要膝關節的相關節動作配合實現。本文所設計的被動步行機器人采用了一種最簡單的膝關節結構,利用電磁鐵通、斷電實現膝關節的放開和鎖合。膝關節的三維模型如圖6所示。
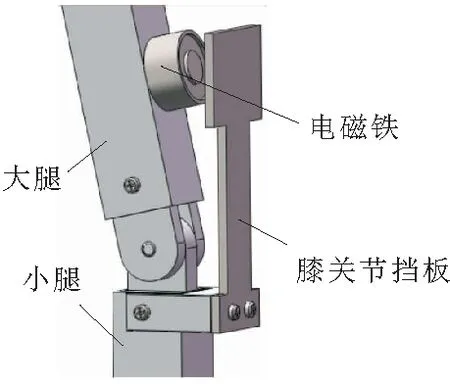
圖6 膝關節三維模型
結合行走過程對膝關節的動作簡述如下:支撐腿的膝關節鎖合,支撐腿上的大腿和小腿不會發生相對旋轉;此時,擺動腿的膝關節放開,進行自由擺動,系統為3自由度;當擺動腿上的小腿和大腿擺動到同一條直線上時,即膝關節發生碰撞,電磁鐵通電,擺動腿膝關節鎖合,系統變為2自由度雙直腿結構并繼續擺動;當足底曲面板和地面發生碰撞之后,微擺動腿和支撐腿角色互換,原支撐腿的膝關節打開,此時又變回3自由度擺動。
3.3 踝關節和足部設計
基于人體參數的被動步行機器人采用不完全對稱的雙足結構。通過研究表明,這種結構的機器人在行走過程中會發生“偏航”。當單腿支撐時,擺動腿一側重,會產生繞支撐點的旋轉力矩,導致該機器人不能以直線行走。為了避免“偏航”,并提升機器人的行走能力,需要對踝關節和足部的結構進行特殊的設計。采取的主要措施包括:
a.用1個十字聯軸器連接小腿和足部,聯軸器四周用對抗彈簧拉緊,形成1個具有柔性的踝關節結構。機器人在行走過程中,沿冠狀面分布的彈簧會根據受力不同產生不同的壓縮量,使壓力中心產生左右波動,對“偏航”起到削弱作用。足部觸地瞬間開始,沿矢狀面分布的彈簧發生形變,進行儲能,足部離地瞬間,彈簧力會使機器人產生蹬地動作,加快擺動腿的擺動。
b.采用如圖7所示的特殊足部形狀,對行走過程進行引導。該足底在矢狀面和冠狀面的投影都是一個圓弧形。這種結構使得被動步行機器人在行走過程中同時具有矢狀面和冠狀面的運動。可以有效避免足部發生“擦地”的現象。
c.在足底安裝防滑橡膠墊,提升足-地接觸面的摩擦系數,增大摩擦力,削弱偏航現象。
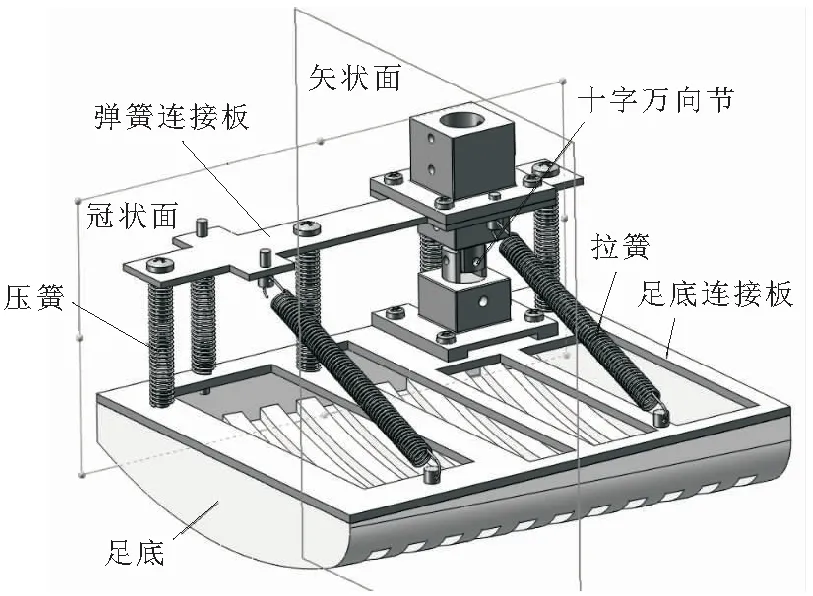
圖7 踝關節和足部三維模型
3.4 整體結構
根據之前章節的鋪墊,提出一種基于人體參數的被動步行機器人三維模型,如圖8所示。
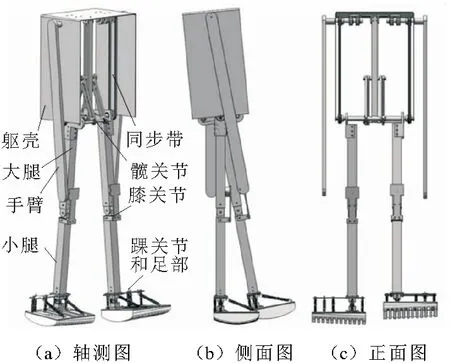
圖8 整體結構
整體結構主要包括:驅殼、大腿、小腿、手臂、膝關節、髖關節、踝關節和足部。結構尺寸按照機械系統整體設計的要求進行。
4 虛擬樣機仿真實驗
前面章節給出了被動步行機器人的詳細三維模型,本章利用ADAMS建立虛擬樣機模型,以更接近實際的虛擬實驗環境對這種基于人體參數的被動步行機器人行走機理進行驗證。如圖9所示,是基于人體參數的被動力學機器人在ADAMS仿真環境下的行走仿真圖。
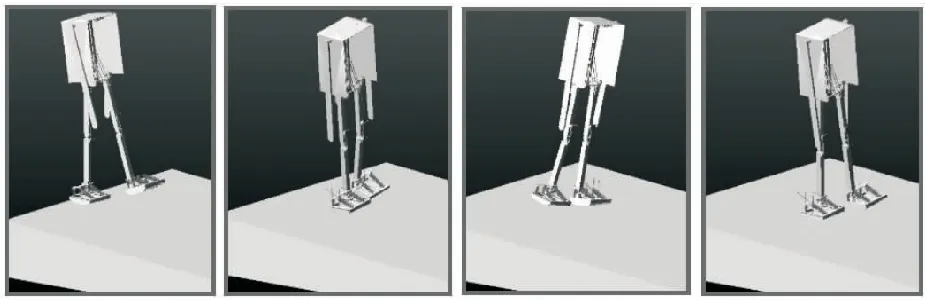
圖9 ADAMS虛擬樣機仿真示意
5 結束語
利用空間算子代數相關理論進行動力學建模和局部穩定性分析發現,基于人體參數的被動步行機器人具有穩定走下斜坡的能力,從理論上驗證了“被動力學”在仿人步行領域的研究價值。為了從實用化的角度展現“被動力學”在助步設備研制過程中的應用價值,針對本文所研究的被動力學機器人進行了機械系統詳細設計,建立其三維模型并進行虛擬樣機仿真實驗。
綜上所述,本文給出一種基于人體參數的被動步行機器人模型,并對其運動特性展開了較為全面的分析。最終結果不僅為實物樣機的研制奠定了基礎,還給被動步行機器人的參數優化提供了新的方向,對被動式助步設備的研制也起到了推動作用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
