17自由度仿真人形教育機器人控制系統(tǒng)設計
2020-05-08 09:36:52楊劍黃澤鵬吳昶華李昆
機械工程師 2020年4期
關鍵詞:指令
楊劍,黃澤鵬,吳昶華,李昆
(華南理工大學 廣州學院,廣州510800)
0 引 言
目前機器人應用主要面向制造業(yè)和娛樂行業(yè),隨著全國各地機器人大賽的舉辦和普及,各大、中、小學校越來越重視機器人教育與培訓。本文設計了一款應用于普及機器人知識的17自由度仿真人形教育機器人。
1 系統(tǒng)概述
控制器系統(tǒng)以ARM7處理器為核心通過串口下載和傳輸控制信息,主要由17路舵機控制驅動電路接口、串口通信調試電路、遙控接口及電源等幾部分組成。通過UBT12HB 舵機總線半雙工串口UART通信協(xié)議,采用定時器產生17路PWM驅動信號,控制機器人各種姿態(tài)下的舵機角度和速度。該系統(tǒng)具有運動形態(tài)新穎、運動效果優(yōu)異、操作反應靈敏、體態(tài)特征豐富等特點,可應用于機器人知識普及和教學。
2 硬件設計
2.1 舵機控制設計
舵機是一種位置角度伺服驅動器,含控制電路、驅動馬達、差速器、位置檢測器和外殼等部件,其中控制電路上有用于驅動馬達與進行信號通信的IC電路,內部齒輪一般采用金屬材質,能夠在提供大轉矩的同時保證結構上的穩(wěn)固。舵機結構如圖1所示。
2.2 舵機選擇
本文采用的舵機是UBT12HB 串行總線伺服舵機,舵機輸出轉矩為0.8 N·m(6.5 V),1.2 N·m (8.5 V),最大可以提供0.198 s/60°的轉速,角度偏轉范圍為-30°~240°。滿載電流為0.9 A,采用半雙工串口UART通信協(xié)議。URAT串口波特率:115 200;數(shù)據(jù)位位:8;停止位:1;校驗位:0;流量控制:NONE。采用TTL電平多層連接,共用總線,最多可以連接240個舵機。舵機主要通信協(xié)議部分參數(shù)如表1所示。
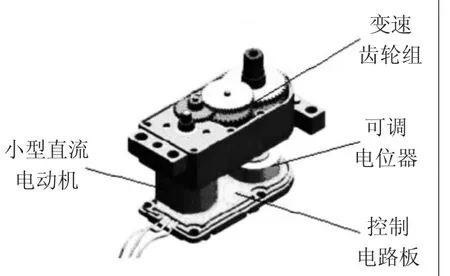
圖1 舵機結構圖
2.3 機器人控制上位機設計
上位機通過winform平臺下提供的接口發(fā)送串口數(shù)據(jù),經簡單硬件轉換成半雙工串口傳輸信號與舵機通信。17自由度串行總線舵機機器人控制上位機的主要功能如圖2所示。
上位機依靠串口通信,在進行通信之前需要對串口進行檢測,檢查舵機機器連接狀態(tài)及通信狀態(tài)是否穩(wěn)定,在連接穩(wěn)定之后才能進行下一步的操作。舵機控制模塊由舵機編號(id)選擇、角度、速度,以及批處理功能模塊組成,能夠對17路總線舵機組中的單個或多個進行單獨或批量控制和通信。在控制信號發(fā)送之前需要對控制信號及指令進行檢查校驗其合法性及是否具有實際意義。篩選過濾無用指令,計算整理后由串口發(fā)送之后交給串口控制模塊檢查通信情況。

圖2 上位機整體主要功能圖

表1 舵機主要通信協(xié)議部分參數(shù)
3 軟件設計
3.1 界面設計
軟件主界面如圖3所示:左半界面是與17路串行伺服舵機實際對應位置圖,用于顯示實際控制中的舵機機器人的狀態(tài),以及能夠以某些交互方式提高舵機選擇效率與定位;右側為數(shù)據(jù)控制與舵機操控面板,右下為信息面板,用于顯示各種交互信息和反饋數(shù)據(jù)。

圖3 軟件主界面
3.2 串口檢測
在Visual C#平臺下,利用.NET Framework 中的SerialPort組件,可以實現(xiàn)底層的串口通信,使用之前引入相應的命名空間System.IO.Ports,利用SerialPort屬性:PortName、BaudRate、DataBits、StopBits、Parity 等 進 行 串口的配置,采用DataReceived方法進行數(shù)據(jù)接收和通信檢查。配置部分代碼如圖4所示。
由于SerialPort接收數(shù)據(jù)是同步阻塞調用,所以使用Invoke自動創(chuàng)建線程,接收來自串口的數(shù)據(jù)之后通過緩存數(shù)據(jù)幀再在程序線程內部檢查格式,匹配舵機機器人的應答指令。
3.3 串口通信與校驗
在舵機機器人的連接過程中,需要進行通信的應答,來判斷舵機組的連接情況與通信情況,在判斷之前需要校驗接收數(shù)據(jù)的格式,部分代碼如圖5所示。
3.4 伺服舵機控制指令
根據(jù)舵機通信協(xié)議,將某些控制指令定義在屬性上,部分代碼如圖6所示。
代碼中的幀頭內容對應舵機文檔協(xié)議,stop、test、read等字節(jié)數(shù)組內存放常用指令,在程序內部通過線程使用相應的屬性,可以達到一個基本的控制效果。

圖4 Serial Port配置部分代碼
3.5 指令格式轉換
上位機通過串口發(fā)送字節(jié)指令,接收來自舵機機器人應答信號處理通信問題,但是程序內部字節(jié)指令不能直觀地進行操作和交互,需轉換成字符、十進制或者其他格式交互操作,部分指令格式轉換的代碼如圖7所示。
常見的幾種轉換方法有textWork16、str10to16、str16to10等,由于交互界面上的指令數(shù)據(jù)基本是text,在獲取輸入數(shù)據(jù)之后,調用相關方法將string指令轉換為byte指令存入指令表中以獲取操作數(shù),并將指令缺失的字節(jié)操作碼補全。
3.6 指令編輯

圖5 串口檢查校驗部分代碼圖

圖6 通信1協(xié)議部分圖

圖7 部分指令轉換方法代碼
上位機的指令編輯可以分為單路伺服舵機的指令編輯與多路舵機指令的批量編輯。部分編輯的指令存放如圖8所示。

圖8 部分指令存放結構圖
單個舵機的指令編輯比較簡單,并沒有太多的操作限制,對于批量舵機的操作,關系到舵機機器人的姿態(tài)及批量操作中的舵機id,會存在重復、不規(guī)范、無意義的情況,所以需要對姿態(tài)的操作做一個結構上的定義和編輯上的限制。
4 姿態(tài)動作設計
對于17路伺服舵機機器人的姿態(tài)(主要是在某一時刻狀態(tài)和連續(xù)的動作時對相關舵機的操作角度、回讀角度、持續(xù)時間、延時等情況)進行描述,舵機組控制指令編輯流程如圖9所示。

圖9 舵機組控制指令編輯流程圖
對于舵機機器人姿態(tài)控制,可以分為靜態(tài)和動態(tài)狀態(tài),連續(xù)的靜態(tài)姿態(tài)組成一個基本的動態(tài),多個動態(tài)組成一個動作指令集,對于多個靜態(tài)姿態(tài)組成的動態(tài),在編輯的時候將其分為多個動作組,不同的動作組之間互不影響,相同的動作組內應該是舵機的最小集合,對于指令的編輯的增、刪、改,有跨組編輯和組內編輯,應該考慮不同情況下操作合法性和合理性。
指令編輯操作完成后需要更新數(shù)據(jù),其次刷新現(xiàn)有動作組,然后提交給異步線程處理,可以在異步線程中執(zhí)行指令或者保存指令,在執(zhí)行指令時可能會有一些誤差,可以在執(zhí)行過程中給指令進度添加一進度條,方便對當前執(zhí)行狀態(tài)的觀察及后續(xù)數(shù)據(jù)調整。部分執(zhí)行代碼如圖10所示。

圖10 部分執(zhí)行指令進度代碼
5 結語
區(qū)別于普通的通過控制板控制伺服舵機,文章研究了在.net平臺下利用總線串口直觀地控制一種17伺服舵機組成的機器人姿態(tài),通過指令集及對指令集的操作,可以直接獲取到控制所需的字節(jié)指令,方便指令的移植及機器人姿態(tài)的研究,對于獲取到的動作指令,內容包括舵機號、舵機角度、速度及持續(xù)時間,得到的數(shù)據(jù)可以適用于其他型號的總線型伺服舵機,能夠縮短舵機組動作姿態(tài)開發(fā)的進度。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
電信科學(2016年10期)2016-11-23 05:11:56
時代農機(2015年3期)2015-11-14 01:14:29
科技傳播(2015年20期)2015-03-25 08:20:30
信息安全研究(2015年3期)2015-02-28 20:18:12
西安航空學院學報(2014年5期)2014-07-13 01:27:52
家電科技(2014年5期)2014-04-16 03:11:28
汽車零部件(2014年2期)2014-03-11 17:46:27
