基于時延補(bǔ)償?shù)腁UV領(lǐng)航跟隨編隊控制
2020-04-28 02:04:10馮之文馮景祥
艦船電子對抗 2020年1期
關(guān)鍵詞:信息
馮之文,姚 堯,苗 艷,馮景祥
(江蘇自動化研究所,江蘇 連云港 222006)
0 引 言
在過去的幾十年中,自主水下航行器(AUV)已被廣泛用于執(zhí)行各種水下任務(wù),包括民用和軍事應(yīng)用,如深海檢查、海洋測繪。對于某些特定應(yīng)用,例如海洋采樣、測繪和海底測量,通過多個AUV合作執(zhí)行任務(wù)可以提高效率、增大服務(wù)區(qū)域并在發(fā)生故障時提供冗余,提高了系統(tǒng)的穩(wěn)定性。一般來說,有3種主要類型的編隊控制策略:即基于行為的策略[1-2],虛擬結(jié)構(gòu)策略[3-4],和領(lǐng)導(dǎo)者-跟隨者編隊策略[5]。每種策略都有自己的優(yōu)點(diǎn)和缺點(diǎn)[6]。在這些策略中,領(lǐng)導(dǎo)者-跟隨者編隊策略由于其簡單性和可擴(kuò)展性等優(yōu)點(diǎn)而被許多研究廣泛考慮。
在多AUV編隊系統(tǒng)中,AUV的通信能力有限以及環(huán)境的限制,水聲通信受到傳播速度的限制,不可避免地會產(chǎn)生較大的時延;水聲通信具有高噪聲、多途干擾、多普勒傳播等不穩(wěn)定特性,使通信具有較高的誤碼率;水聲通信所消耗的能量遠(yuǎn)高于陸上無線通信,造成水聲通信范圍遠(yuǎn)遠(yuǎn)變小。這類弱通信系統(tǒng)的主要特征有:不可忽略的通信時延、間歇性通信失效或中斷、有限通信范圍以及高誤碼率等。
信息延遲是弱通信系統(tǒng)必須面對的問題,對系統(tǒng)穩(wěn)定性的影響不能忽視。由于接收到的領(lǐng)航AUV信息存在時間上的滯后性,系統(tǒng)在未來時刻的狀態(tài)由當(dāng)前狀態(tài)和歷史狀態(tài)共同決定,系統(tǒng)的穩(wěn)定性受到時延大小的影響。當(dāng)個體間的信息傳輸延遲太大,超過某一臨界值時,多AUV系統(tǒng)無法形成穩(wěn)定的編隊隊形,使原來穩(wěn)定的編隊變?yōu)椴环€(wěn)定。文獻(xiàn)[7]中,作者基于一致性的思想研究了水聲通信帶來的通信延遲問題,提出的控制律能夠允許一定的通信時延,達(dá)到了編隊控制的目的。文獻(xiàn)[8]中,作者提出了具有通信約束的分布式水下航行器群編隊控制算法,當(dāng)航行器間的通信時延小于某個確定的上界時,算法是有效的。但是文中每個個體接收到的鄰居個體的信息狀態(tài)及其時間導(dǎo)數(shù)均存在一個固定的時延T,現(xiàn)實(shí)中個體與個體之間的通信時延是時變的,算法上具有一定的局限性。文獻(xiàn)[9]中,作者針對時延問題,提出了一種不同時變通信延遲的解決方法,也是將AUV的編隊時延問題轉(zhuǎn)化成一致性問題。
目前,國內(nèi)外雖然對編隊控制的研究策略取得了一定的成果,有部分學(xué)者對此類問題展開了研究,但都是在較為理想的條件下展開研究,比如時延不變而且已知,或者時延可變但有時延上限,且大部分研究主要是進(jìn)行一致性的算法設(shè)計,基于一些比較簡單的模型得到一致性收斂的條件。基于以上的分析,針對通信延遲下,領(lǐng)航跟隨編隊控制方法隊形穩(wěn)定性變差的問題,本文提出了一種基于時延補(bǔ)償?shù)木庩牽刂品桨福捎梅床椒ê屠钛牌罩Z夫直接法設(shè)計了領(lǐng)航跟隨編隊控制律,實(shí)現(xiàn)了理想通信情況下的編隊保持。接著引入通信時延,利用最小二乘法根據(jù)領(lǐng)航AUV的當(dāng)前和歷史狀態(tài)信息進(jìn)行狀態(tài)的擬合,根據(jù)時延誤差預(yù)測出當(dāng)前時刻的領(lǐng)航AUV的狀態(tài)信息,帶入到控制器中進(jìn)行擬合。從仿真結(jié)果可以看出,該方法簡單有效,可以減小編隊的誤差,提高編隊的穩(wěn)定性。
1 問題描述
1.1 AUV數(shù)學(xué)模型
本文只考慮AUV二維平面內(nèi)的運(yùn)動,因此只考慮AUV水平面內(nèi)的數(shù)學(xué)模型,可分為運(yùn)動學(xué)模型和動力學(xué)模型,分別如下:
(1)
(2)

從式(2)中可以看到,對于側(cè)向速度vr而言,是沒有任何外部輸入的。
1.2 AUV領(lǐng)航跟隨編隊描述
考慮由n個AUV組成的系統(tǒng),這些AUV將保持所需的編隊隊形,并且每個跟隨AUV都可以和領(lǐng)航AUV組成1個子系統(tǒng)。對于每一個子系統(tǒng),當(dāng)領(lǐng)導(dǎo)者AUV巡航時,可以生成跟隨者的參考軌跡,以使其跟隨位置ηf相對于領(lǐng)導(dǎo)者位置ηl的距離為ρ,方向?yàn)棣痢N覀兲岢隽酸槍γ總€跟隨者AUV的跟隨編隊控制算法。令ηl=[xl,yl,ψl]T,表示為領(lǐng)航者的位置矢量。然后,領(lǐng)導(dǎo)者的運(yùn)動學(xué)模型可以描述為:
(3)
式中:vl=[ul,vl,rl]T,為領(lǐng)航者AUV的速度矢量。
類似地,跟隨者AUV的運(yùn)動學(xué)模型可以描述為:
(4)
如圖1所示,跟隨者AUV的期望位置和領(lǐng)航者AUV的幾何關(guān)系如圖1所示。
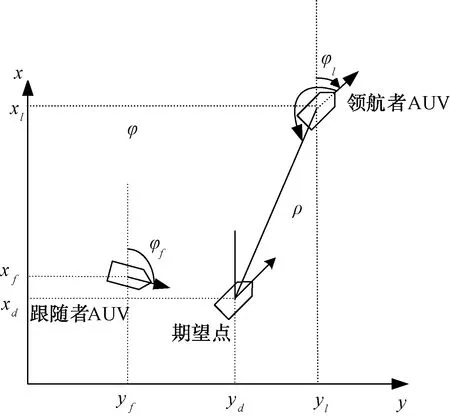
圖1 領(lǐng)航跟隨方法示意圖
由此幾何關(guān)系可以用領(lǐng)航者AUV的位置信息矢量表示跟隨者AUV的期望位置矢量信息如下:
(5)
只要控制跟隨船跟蹤并沿著參考船軌跡運(yùn)動,便可以實(shí)現(xiàn)編隊航行。因此,基于領(lǐng)航-跟隨方法的編隊控制問題可以描述如下:在可以獲知領(lǐng)導(dǎo)船的位置、姿態(tài)信息的條件下,為跟隨船設(shè)計控制律,使得xf→xd,yf→yd,ψf→ψl。
1.3 控制律的設(shè)計
在這里首先假設(shè)領(lǐng)航者AUV與跟隨者AUV之間的通信是理想的,即領(lǐng)航者AUV與跟隨者AUV之間的通信不存在延時,在理想通信的情況下進(jìn)行控制律的設(shè)計[10]。
(1) 運(yùn)動學(xué)控制律的設(shè)計
由于AUV是欠驅(qū)動的,因此在其橫向上沒有控制輸入。因此首先要設(shè)計控制速度uf和rf。定義跟隨者AUV與參考船的絕對誤差:
(6)
式中:ψd?Atan2(-ey,-ex),并定義d?‖[ex,ey]T‖2,提出以下速度控制律,以使d和eψ收斂為零。
(7)
(8)
式中:ku,kr>0。
證明:應(yīng)用上述控制律,誤差動態(tài)描述可以寫為:
(9)
又cosψd=ex/d,sinψd=ey/d,所以d和eψ對時間的導(dǎo)數(shù)可以寫成:
(10)
eψ收斂到0的證明:
(11)
(12)
因此,可以容易地得出結(jié)論:eψ有界并收斂到零,即eψ是漸近穩(wěn)定的。
d和vf的有界性:
-(d22/m22)vf-(m11/m22)×
{[-vf(taneψ-eψ/coseψ)-
kud/coseψ-al(·)-bl(·)taneψ]·
(13)
為了簡化計算,對式(13)進(jìn)行化簡,在這里定義:
(14)
取李雅普諾夫函數(shù)為:
(15)
其導(dǎo)數(shù)為:
[g2(·)+eψ]dvf+g3(·)vf
(16)
根據(jù)楊氏不等式定理可以得出下列不等式:
(17)

所以可以得到:
(18)
(19)
(20)
因此可以得出結(jié)論:對于所有的t∈[t0,T],vf,d都是一致有界的。現(xiàn)在考慮t∈[T,∞)的情況,根據(jù)eψ收斂到0的證明,隨著T→∞,eψ收斂到0,然后,通過選擇足夠大的T和足夠小的正常數(shù)ε,a,b,可以得出以下不等式:
(21)

然后,利用楊氏不等式,可以得出:
(22)
式(22)證明,對于t∈[T,∞),vf和d都是有界的,結(jié)合之前證明的對于所有的t∈[t0,T],vf,d有界,所以對于?t≥t0,Vf和d是一致有界的。d的收斂性證明參照文獻(xiàn)[11]的級聯(lián)理論進(jìn)行證明,不再進(jìn)行贅述。
(2) 動力學(xué)控制律的設(shè)計
為了對動力學(xué)控制律進(jìn)行設(shè)計,本文借助反演法將控制律擴(kuò)展到動力學(xué)的層面上,將式(7)中的uf和rf作為虛擬的控制輸入ufd和rfd。
首先引入誤差變量:
(23)
式中:ufd和rfd為所需的速度控制輸入。
速度誤差的時間導(dǎo)數(shù)可推導(dǎo)為:
(24)
考慮由式(10)和式(24)描述的系統(tǒng),應(yīng)用以下動力學(xué)控制律:
(25)
式中:kτ1,kτ2為正數(shù)。
動力學(xué)控制律穩(wěn)定性證明:
取李雅普諾夫函數(shù):
(26)
其導(dǎo)數(shù)為:
(27)
根據(jù)楊氏不等式,可以獲得以下不等式:
(28)
然后,如果選擇速度控制增益,使得ku,kr>γ/2,則閉環(huán)系統(tǒng)漸近穩(wěn)定。
2 基于時延補(bǔ)償?shù)木庩牽刂?/h2>2.1 AUV通信方式
水下通信環(huán)境比陸地上要差得多,為了提高通信的穩(wěn)定性,目前的AUV領(lǐng)航跟隨編隊一般選取領(lǐng)航AUV廣播自身狀態(tài)信息的方式,將信息傳遞給跟隨AUV。如圖2所示,設(shè)#1為領(lǐng)航者AUV,#2~#n為跟隨者AUV,領(lǐng)航者AUV將自身的狀態(tài)信息廣播給跟隨者AUV,跟隨者AUV與領(lǐng)航者AUV、跟隨者AUV與跟隨者AUV之間均不進(jìn)行通信。

圖2 AUV群體通信方式
領(lǐng)航者AUV廣播的狀態(tài)信息為(x,y,ψl,t),x,y為領(lǐng)航者AUV的位置信息,ψl為領(lǐng)航者的航向角信息,t為發(fā)送信息時的時間,即時間戳,當(dāng)通信理想時,按照1.3節(jié)所設(shè)計的控制律編隊就可以得到很好的保持,即:
(29)
但在實(shí)際應(yīng)用當(dāng)中,AUV之間的通信并不能被理想化,通信延時是必然存在的,領(lǐng)航者在t時刻廣播的狀態(tài)信息必然不能在t時刻被跟隨者AUV所接收,對于不同的跟隨者,存在著不同的通信時延τi,即跟隨者AUV會在t+τi時刻接收到領(lǐng)航者AUV在t時刻廣播的狀態(tài)信息,此時若不進(jìn)行補(bǔ)償,則跟隨者的控制律變?yōu)椋?/p>
(30)
延時系統(tǒng)框圖如圖3所示。

圖3 通信延時下的領(lǐng)航跟隨編隊控制系統(tǒng)框圖
在此控制律下,隊形的保持必然不如理想通信條件下的編隊效果,因?yàn)榭刂坡芍械臓顟B(tài)信息永遠(yuǎn)不是當(dāng)前時刻的領(lǐng)航者的狀態(tài)信息,因此,需要對當(dāng)前的情況采取一定的措施來改善通信延時對編隊隊形的影響。
2.2 AUV通信補(bǔ)償原理
在實(shí)際問題中,人們常常需要從1組觀測數(shù)據(jù)(xi,yi),i=1,2,…,n中作出一種預(yù)測:下一個x對應(yīng)的y值是什么,即預(yù)測函數(shù)y=f(x)的表達(dá)式。從幾何上看,這個問題就是要由給定的數(shù)據(jù)點(diǎn)(xi,yi),i=1,2,…,n去描繪曲線y=f(x)的圖像,即所謂的數(shù)據(jù)擬合問題。插值方法可以作為處理這種問題的一種數(shù)值方法,但不是很好的方法。因?yàn)楝F(xiàn)在所給數(shù)據(jù)本身就不一定可靠,而插值曲線要求嚴(yán)格通過所給的每一個數(shù)據(jù)點(diǎn),這種限制會保留所給數(shù)據(jù)的誤差。此外,所給數(shù)據(jù)的數(shù)量通常很多,也會影響插值的效果。曲線擬合方法就是希望從這一大堆看上去雜亂無章的數(shù)據(jù)中找出規(guī)律來,設(shè)法構(gòu)造一條所謂的擬合曲線,反映所給數(shù)據(jù)點(diǎn)總的趨勢,最小二乘法就是這樣的一種擬合方法。
由于AUV的機(jī)動性能不強(qiáng),本文將基于最小二乘法提出補(bǔ)償時延的方法。最小二乘法是很經(jīng)典的參數(shù)估計方法,它計算快速簡單,通常用多項(xiàng)式擬合模型去逼近目標(biāo)軌跡,通過最小化誤差的平方和尋找數(shù)據(jù)的最佳函數(shù)匹配。利用最小二乘法可以簡便地求得未知的數(shù)據(jù),并使得這些求得的數(shù)據(jù)與實(shí)際數(shù)據(jù)之間誤差的平方和為最小。
領(lǐng)航AUV廣播的自身狀態(tài)信息中包含(x,y,ψl,t),假設(shè)領(lǐng)航AUV在tm時刻廣播了自身的狀態(tài),系統(tǒng)中的某個跟隨AUV在tn時刻接收到了領(lǐng)航者AUV在tm時刻(在這里,AUV自身信息傳播時間忽略不計)的信息,則該跟隨者AUV可以計算出時延τ,假設(shè)跟隨者AUV在tn時刻之前一共接收到n個領(lǐng)航者AUV的狀態(tài)信息,分別記為(x1,y1,ψl1,t1),(x2,y2,ψl2,t2),(x3,y3,ψl3,t3)...(xn,yn,ψln,tn),本文的任務(wù)是根據(jù)這些歷史信息盡可能去預(yù)測領(lǐng)航者AUV在tm時刻的狀態(tài)信息(xm,ym,ψlm,tm)以及tm和下一通信時刻的中間狀態(tài)信息。
本文中的領(lǐng)航者狀態(tài)信息是一個四維數(shù)組時間序列,無法直接應(yīng)用最小二乘法預(yù)測領(lǐng)航AUV當(dāng)前時刻的狀態(tài),因此需要對過去時刻的狀態(tài)信息進(jìn)行相應(yīng)的處理,本文將狀態(tài)信息(xi,yi,ψli,ti)轉(zhuǎn)化成3個二維狀態(tài)(xi,ti),(yi,ti),(ψli,ti),然后運(yùn)用最小二乘法對歷史時刻的數(shù)據(jù)進(jìn)行擬合,可以得到3條關(guān)于自變量t的曲線方程如下:
(31)
根據(jù)擬合好的曲線對tm時刻的狀態(tài)信息進(jìn)行求解,將t=tm代入求解,得到xm,ym,ψlm,最終得到領(lǐng)航者經(jīng)過時延補(bǔ)償以后的狀態(tài)量(xm,ym,ψlm,tm),在下一個領(lǐng)航者狀態(tài)信息到來之前,都將根據(jù)擬合好的狀態(tài)曲線對領(lǐng)航者的狀態(tài)信息進(jìn)行預(yù)測,整個過程如圖4所示。
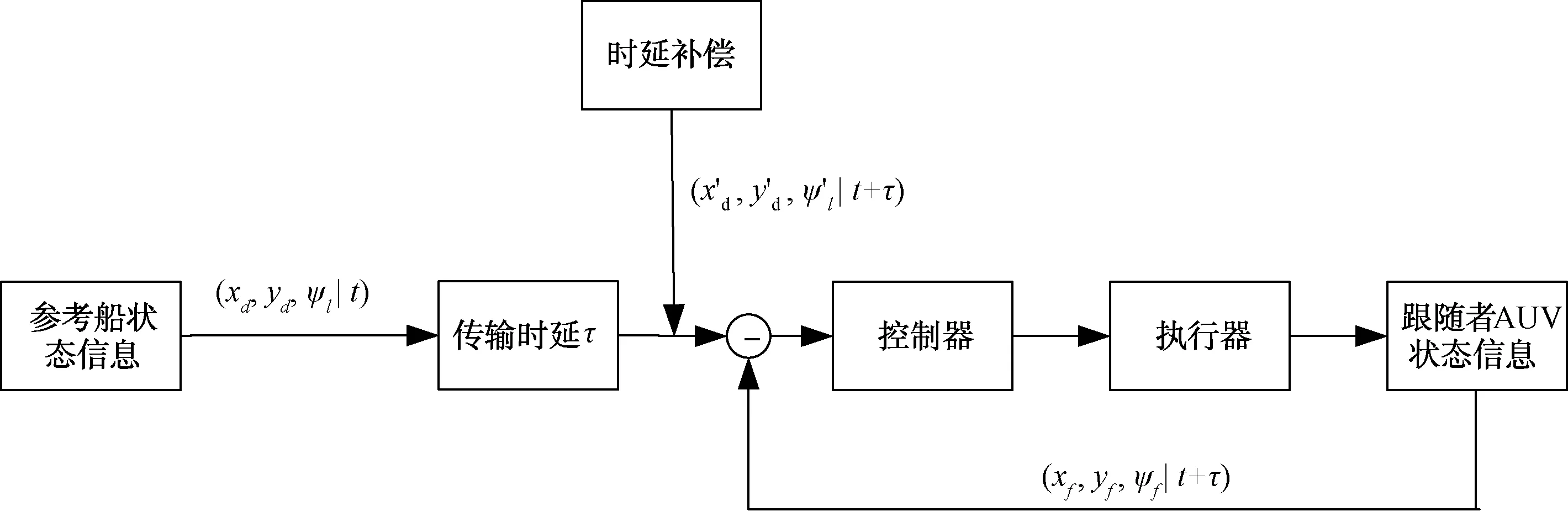
圖4 通信延時補(bǔ)償下的領(lǐng)航跟隨編隊控制系統(tǒng)框圖
2.3 算法流程
一般來說,曲線的擬合要用到過去時刻的大量AUV狀態(tài)信息,但考慮到AUV在水中的機(jī)動性較差,也就是說AUV的運(yùn)動趨勢是緩慢變化的,因此在補(bǔ)償通信延時,對領(lǐng)航者AUV的狀態(tài)進(jìn)行預(yù)測的時候,無需將過去時刻的所有狀態(tài)信息考慮在內(nèi),只需要選取當(dāng)前時刻之前的k組狀態(tài)信息來擬合領(lǐng)航者AUV的運(yùn)動狀態(tài),隨著跟隨AUV不斷接收領(lǐng)航者廣播的狀態(tài)信息,跟隨者AUV不斷滑動采集當(dāng)前時刻以及當(dāng)前時刻之前的狀態(tài)信息,實(shí)現(xiàn)了對領(lǐng)航者AUV運(yùn)動軌跡的動態(tài)更新,這種做法可以提高補(bǔ)償?shù)目焖傩浴?/p>
具體算法如下:
(1) 領(lǐng)航者AUV按周期向跟隨AUV廣播自身的狀態(tài)信息;
(2) 跟隨者AUV根據(jù)接收到的領(lǐng)航者AUV的狀態(tài)信息計算出時延τ;
(3) 確定領(lǐng)航者AUV的前k個狀態(tài)信息,根據(jù)最小二乘法對公式(31)進(jìn)行擬合;
(5) 將預(yù)測得到的狀態(tài)信息代入到設(shè)計好的控制器式(30)當(dāng)中,得到下一時刻的狀態(tài)量;
(6) 到達(dá)領(lǐng)航者AUV廣播周期,返回(1)。
3 仿真實(shí)驗(yàn)

(1) 理想通信情況下的AUV領(lǐng)航跟隨控制
由圖5可以看出,在通信理想且連續(xù)的情況下,3個AUV在本文所設(shè)計的控制律中達(dá)到了較好的編隊效果,圖6和圖7表明了領(lǐng)航者AUV和跟隨者AUV之間的距離和相對方位角達(dá)到了仿真時所設(shè)置的期望值,驗(yàn)證了控制律的有效性。
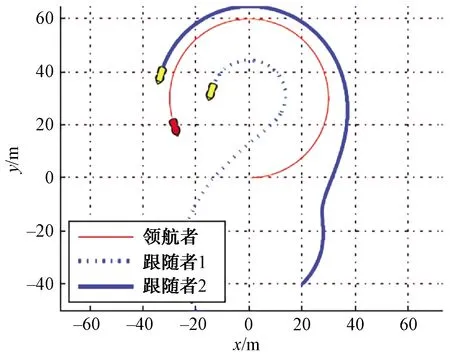
圖5 理想通信下AUV領(lǐng)航跟隨編隊路徑圖

圖6 理想通信下領(lǐng)航跟隨AUV之間的距離
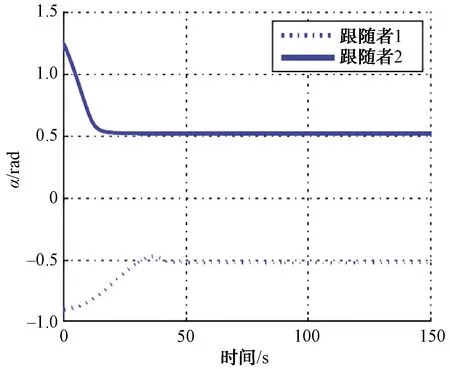
圖7 理想通信下領(lǐng)航跟隨AUV之間的相對方位角
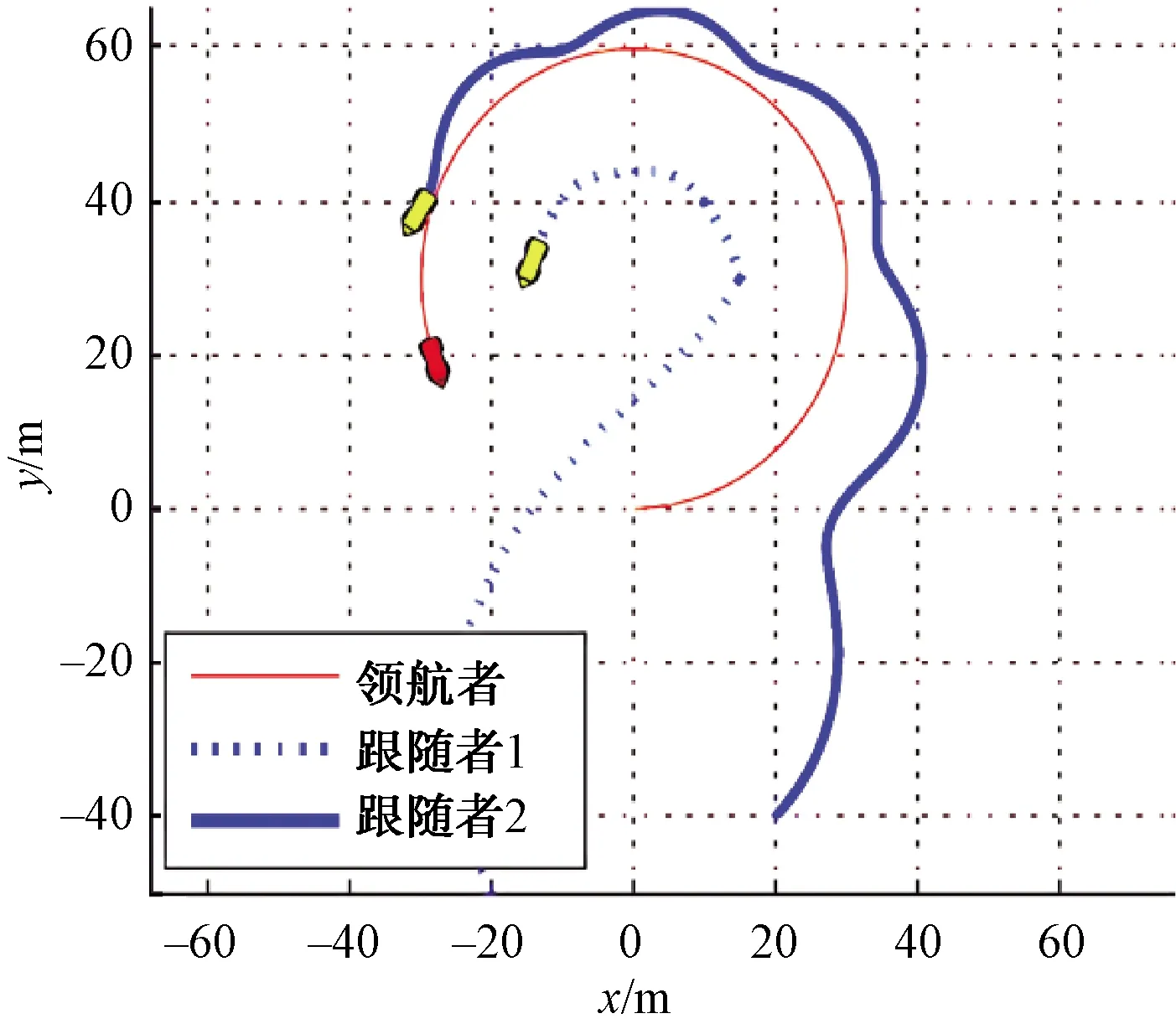
圖8 通信延時下領(lǐng)航跟隨AUV路徑圖
(2) 通信延遲下的領(lǐng)航跟隨AUV編隊控制
圖8顯示了通信延時下的領(lǐng)航跟隨編隊,由于通信延時和通信間隔的存在,相比于理想通信條件下,編隊效果較差。根據(jù)圖9可以看出,由于通信時延和通信間隔的存在,每隔10 s控制律才會做1次相應(yīng)的調(diào)整,跟隨者AUV與領(lǐng)航者AUV之間的相對距離已經(jīng)不能維持在本文所設(shè)置的理想距離,并且領(lǐng)航者所做的是圓周運(yùn)動,所以跟隨者AUV與領(lǐng)航者AUV之間的距離在20 m上下浮動。由圖10可以看出,跟隨者AUV與領(lǐng)航者AUV的相對方位角也因?yàn)檠訒r和通信間隔的存在無法達(dá)到較好的跟蹤效果。
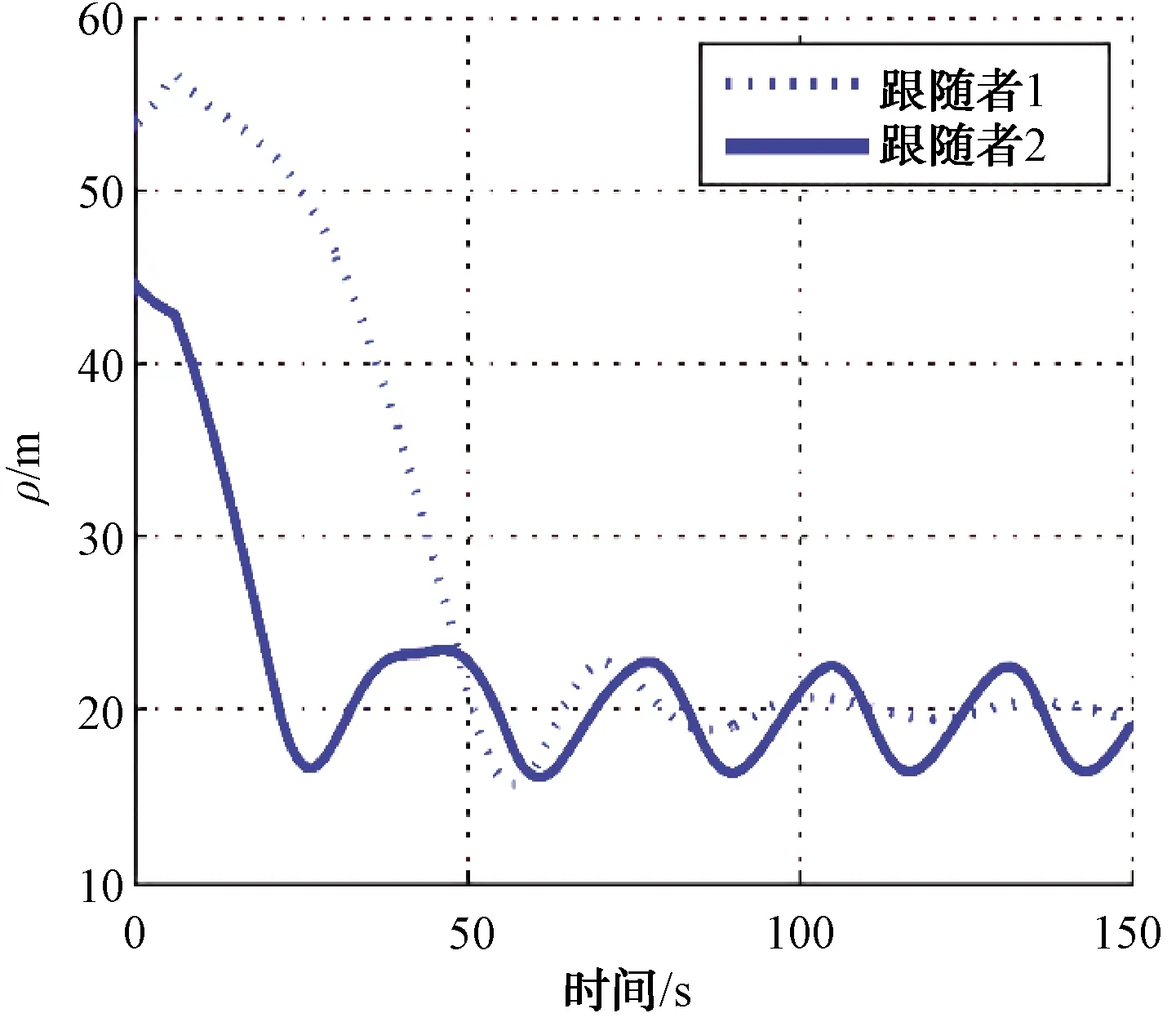
圖9 通信延時下領(lǐng)航跟隨AUV之間的距離
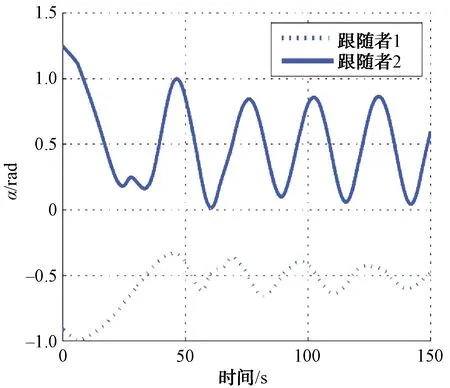
圖10 通信延時下領(lǐng)航跟隨AUV的相對方位角
(3) 時延補(bǔ)償下的AUV編隊控制
圖11顯示了通信延時情況下引入延時補(bǔ)償和預(yù)測的編隊效果,和理想通信條件相比,收斂速度略微有點(diǎn)差距但相比于通信延時情況,隊形得到了很大的改善。從圖12和圖13可以看出,領(lǐng)航者AUV與跟隨者AUV到了我們所期望的距離和方位角,達(dá)到了很好的跟蹤效果。
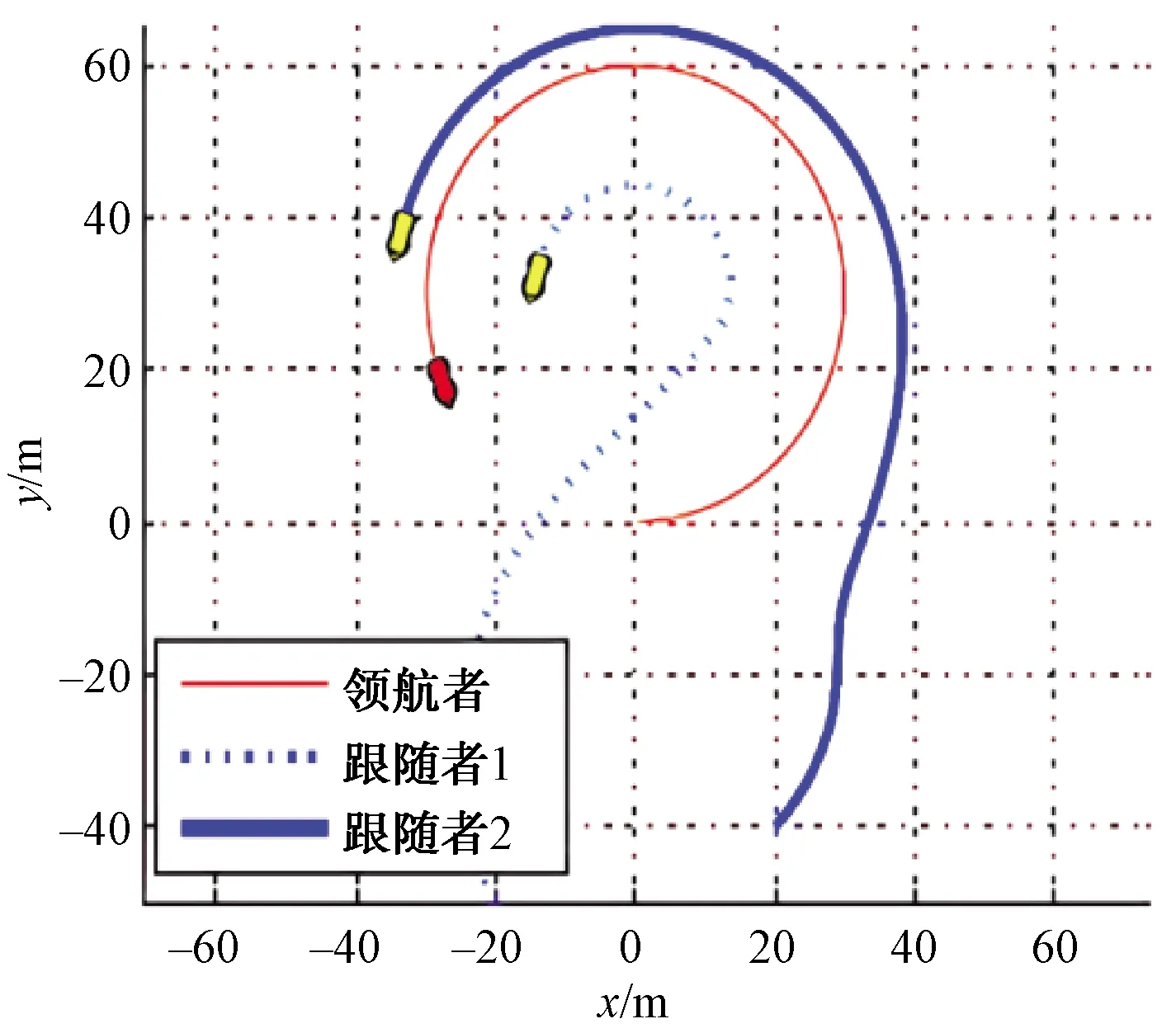
圖11 時延補(bǔ)償下領(lǐng)航跟隨AUV路徑圖
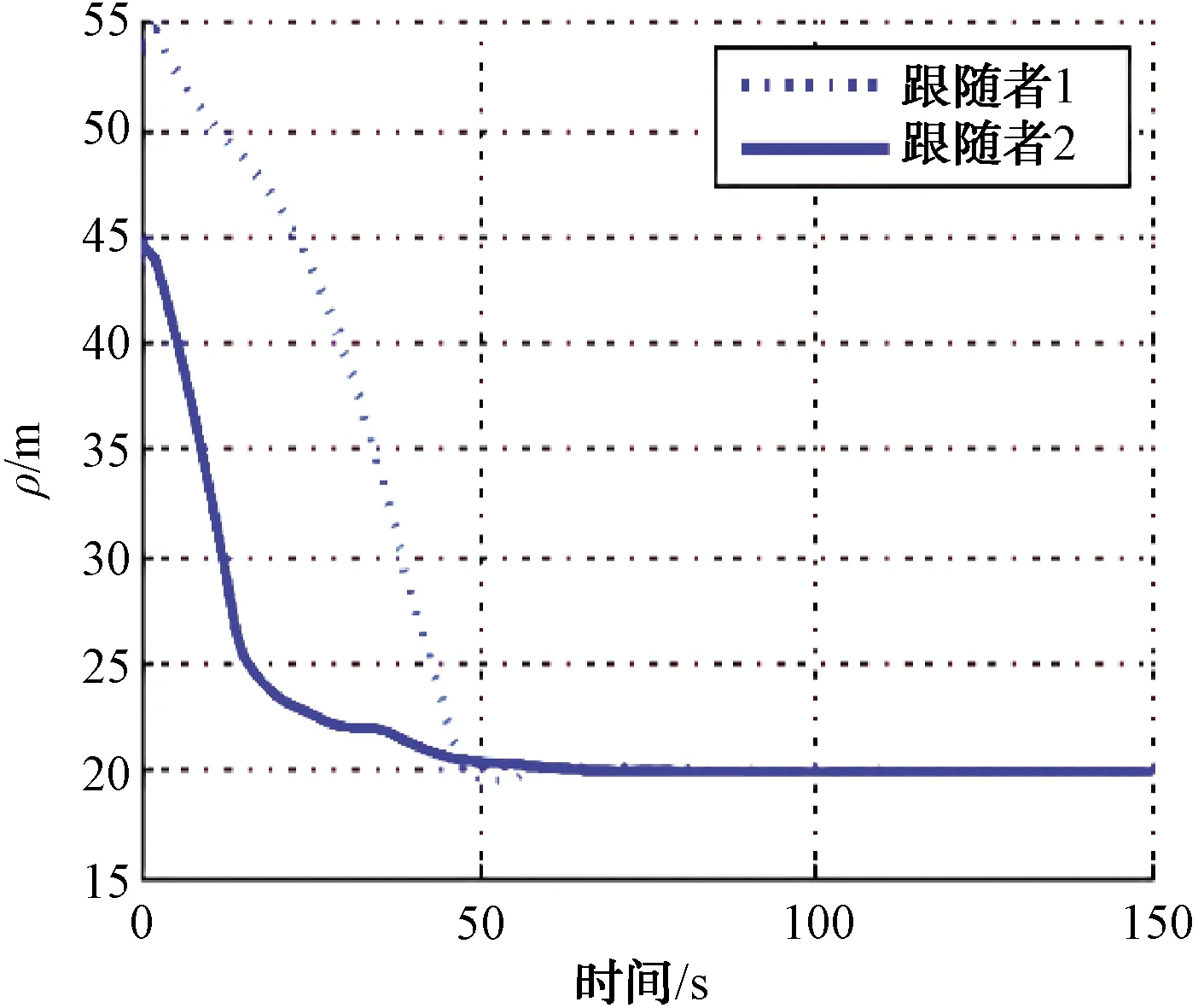
圖12 時延補(bǔ)償下領(lǐng)航跟隨AUV之間的距離
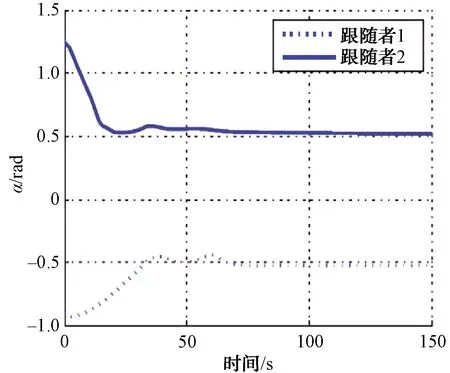
圖13 時延下領(lǐng)航跟隨AUV之間的相對方位角
4 結(jié)束語
本文對AUV領(lǐng)航跟隨編隊控制中的通信延時問題提出了一種延時補(bǔ)償?shù)姆椒ǎI(lǐng)航AUV將自身狀態(tài)傳遞給跟隨AUV,跟隨AUV根據(jù)領(lǐng)航AUV發(fā)送的當(dāng)前狀態(tài)信息與歷史狀態(tài)信息進(jìn)行預(yù)測,并根據(jù)時延的大小預(yù)測出領(lǐng)航AUV當(dāng)前時刻的狀態(tài)信息,用于補(bǔ)償領(lǐng)航跟隨AUV之間的通信延時,減小系統(tǒng)的編隊誤差。通過仿真可以看出本文所提方法的有效性,減小了編隊誤差并提高了編隊穩(wěn)定性。但本文在設(shè)計的過程中,沒有考慮到控制器的約束問題,結(jié)合控制約束問題進(jìn)行延時補(bǔ)償將是下一步工作。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32