基于三維點云的蘋果樹冠層點-葉模型重建方法
2020-04-27 08:41:40郭彩玲
農業機械學報 2020年4期
關鍵詞:模型
郭彩玲 劉 剛
(1.中國農業大學現代精細農業系統集成研究教育部重點實驗室, 北京 100083;2.唐山學院機電工程系, 唐山 063000;3.中國農業大學農業農村部農業信息獲取技術重點實驗室, 北京 100083)
0 引言
虛擬植物為景觀和生長建模、農藝過程模擬等提供了技術服務和技術支撐,為修剪模擬和果園管理技術的提升注入了新的活力[1]。在計算機視覺和計算機圖形學中,三維重建可捕獲真實三維物體的形狀和外觀,進而分析光照分布,對于科學指導果園管理具有重要意義[2-4]。
為了快速無損獲取果樹表面幾何信息、進行果樹三維重建,研究人員嘗試了多種方法[5-7]。通過三維數字化儀[8]獲取樹冠內部葉片位置研究樹冠結構,構建了由葉片組成的冠層結構模型,較準確地反映了樹冠內部結構,但試驗過程存在人工操作過程繁瑣、三維重建效率低等不足[9]。
三維掃描技術[10]加快了獲取冠層點云數據信息技術的發展[11]。利用地面激光掃描儀獲取樹木冠層三維點云,在測量樹木冠層投影面積與體積[12]、三維重建木質化結構[13]、計算森林生物量參數[14]、重建骨架[15-16]、提取和重建葉片邊緣[17-18]、測量枝干尺寸[19-20]等方面,取得了較多研究成果。但是,這些研究大多注重大尺度范圍內的樹木幾何參數信息,對于樹冠內部器官細化結構以及冠層內部葉片空間位置研究較少。面對三維掃描獲取的海量三維點云,如何提取有效點云信息、快速構建蘋果樹冠層三維結構模型,進而研究冠層光照分布[21],仍是相關領域亟待解決的問題。
本文以紡錘體蘋果樹冠層為研究對象,采用地面三維激光掃描儀獲取冠層三維點云數據,提出葉基自動提取方法,建立蘋果樹冠層點模型和點-葉模型,以實現蘋果樹冠層快速三維重建。
1 材料與方法
1.1 儀器與材料
在中國農業大學蘋果樹采摘機器人試驗基地(北京市昌平區南口鎮辛力莊村)開展蘋果樹冠層三維點云數據采集工作。該試驗基地年平均日照時數2 684 h,年平均氣溫11.8℃。果園采用常規管理方式進行春季修剪,行間有草,灌水條件良好,蘋果樹高2.5~3.5 m,株距2.5 m,行距5 m,行方向為東西方向。
試驗采用美國Trimble公司TX8型地面三維激光掃描儀(圖1)采集蘋果樹冠層三維點云數據。激光掃描儀最大掃描范圍為340 m,測量速度為106點/s,視場角為317°×360°,掃描范圍為-10°~10°,精度為0.5°,采用脈沖激光測距,測量精度小于0.5°,100 m測距時,誤差小于等于2 mm。

圖1 地面激光掃描蘋果樹冠層示意圖Fig.1 Sketch of terrestrial laser scanning of apple tree canopy
1.2 試驗方法
研究對象為隨機選擇果園自然生長狀態下樹齡3~8 a的紡錘形宮藤富士蘋果樹(11棵)。試驗不考慮掃描環境諸如溫濕度、大氣壓等參數的影響。數據采集時間為2015—2019年的6、9月,風速小于1.6 m/s時采集的數據作為預處理前的三維點云[11]。
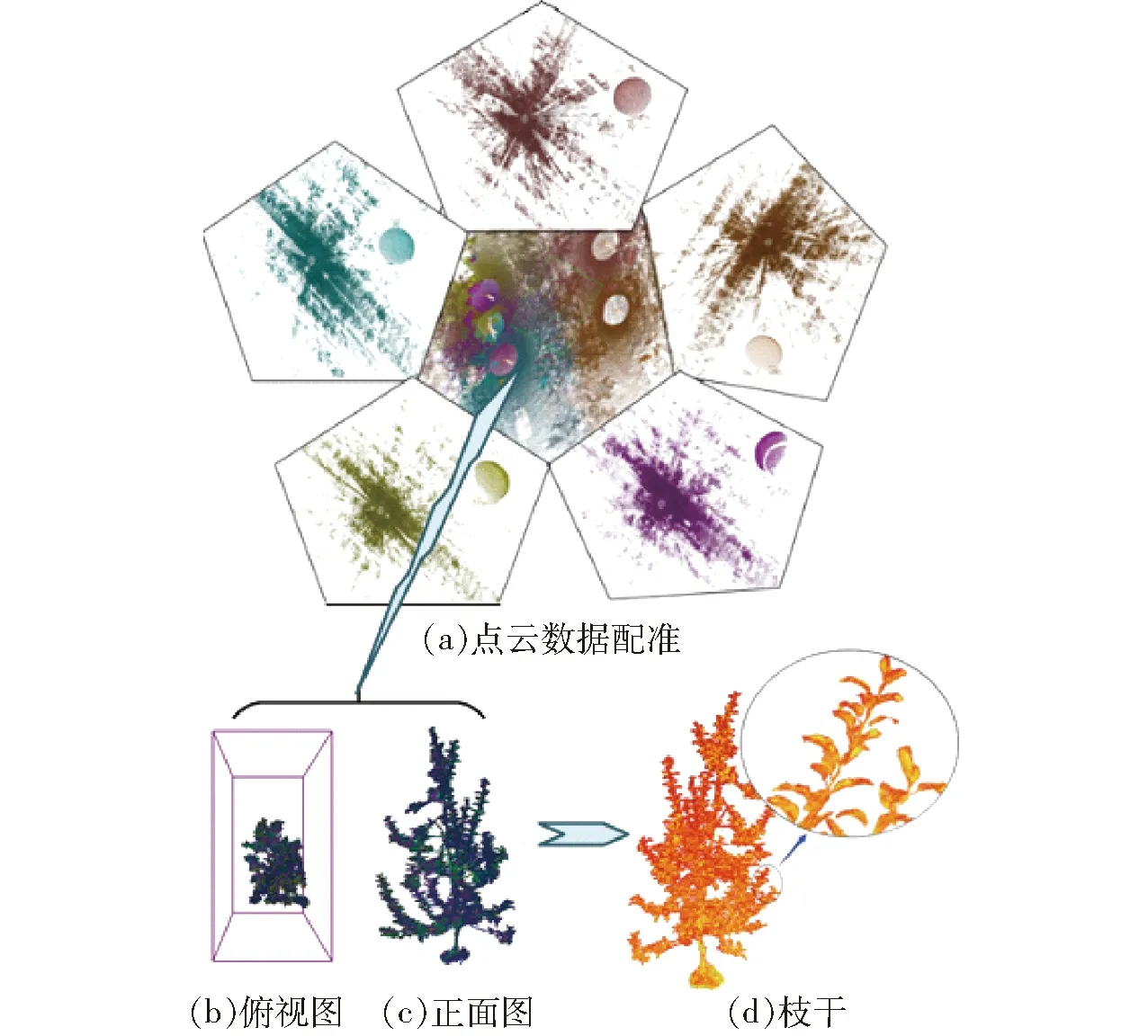
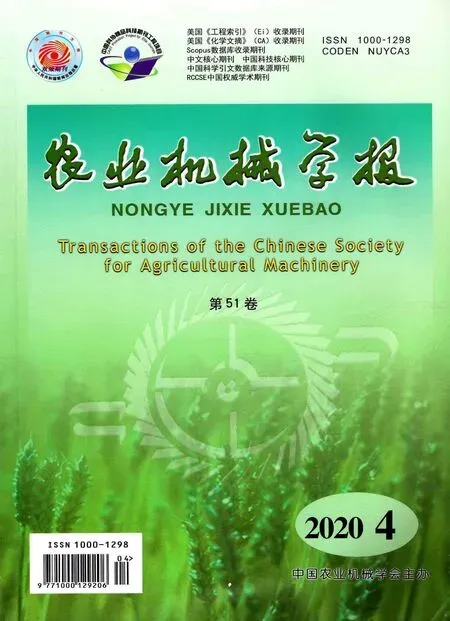
圖2 蘋果樹冠層三維點云提取過程Fig.2 Extraction process of apple tree canopy point cloud data
采用五站掃描方式來掃描蘋果樹冠層,如圖1所示,直徑為145 mm的標靶球作為點云配準依據,掃描品質設置為Level 3。利用KDtree-ICP算法[22]結合標靶球配準的方法[11]配準三維點云,圖2a為TX8型激光掃描儀獲取的蘋果樹冠層三維點云及配準過程,圖2b~2d為在Realworks 12.0軟件中提取冠層枝干部分三維點云過程。首先提取蘋果樹冠層點云數據,并采用基于點云強度的提取方法,剔除點云強度較低的散點,人工檢查并刪除軟件不能剔除的噪聲點,獲取單株蘋果樹冠層三維點云。采用基于曲率的點云壓縮方法,按照坐標軸曲率分布壓縮,利用Matlab軟件中函數pcdownsample實現,圖2d為經過上述步驟處理之后的蘋果樹冠層三維點云可視化圖。
2 模型重建方法
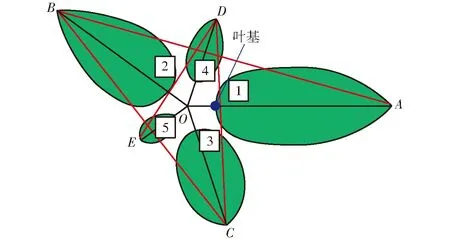
圖3 蘋果樹葉序和葉片葉基Fig.3 Apple tree phyllotaxis and leaf spatial location
葉基是葉柄-中脈連接點的空間坐標,可以描述葉片在蘋果樹冠層中的空間位置[23],也是進行植物冠層結構分析的重要元素[24-25],利用葉片空間位置及葉片基本參數可構成蘋果樹冠層[26]。圖3為蘋果樹冠層葉片葉序和葉基位置圖。其中,1~5為葉序,A~E為頂點,藍色點為葉基,本文葉基提取算法假設葉基為葉片上距離枝干中心最近的點。
2.1 模型重建方法流程
如圖4所示,蘋果樹冠層點-葉模型重建步驟 由4個核心部分組成:提取單葉片、提取枝條中心線、提取葉基、點-葉模型重建。

圖4 蘋果樹冠層點-葉模型重建方法流程圖Fig.4 Flow chat of apple tree point-leaf model reconstruction
2.2 提取單葉片
以2018年蘋果樹冠層為例,提取蘋果樹生長期(5—7月)和葉幕穩定期(8—9月)冠層三維點云,以節間距離較大[27]的營養長/短枝[28]作為研究對象提取單葉片。
利用DBSCAN算法(Density-based spatial clustering of applications with noise)[25]分割蘋果樹冠層三維點云時,點的鄰域半徑(Eps)和點云樣本中的距離為EPS的鄰域中樣本個數(Mintps)由點的特征決定,需手工輸入參數。針對本文獲取的三維點云密度,經過多次聚類試驗,Eps計算公式為
(1)
式中Eps——點的領域半徑參數Eps
Gridstep——三維點云預處理特征有關的量,為原點云數量與壓縮之后的點云數量比值
D——被測量物體到掃描儀的距離,mm
Q——掃描儀掃描指標有關的系數,Trimble TX8型掃描儀中對應為30000/22.6、30000/11.3、30000/5
按照地面三維激光掃描儀的設置,30 m點距為5 mm(被測量物體到掃描儀的距離和掃描點間距的線性變化關系),本文掃描蘋果樹冠層試驗中,掃描儀與樹冠中心距離D為3.5 m,點云壓縮之后的點云數量為原點云數量的1/10(壓縮后點云數量/未壓縮點云數量),Eps參考值為5.8。
自然環境下獲取的蘋果樹冠層三維點云易產生多層現象[9],為了保證葉片三維點云的完整性,Mintps取值為4。
圖5a為隨機提取生長期蘋果樹冠層一根枝條,進行DBSCAN聚類分割結果,其中,不同顏色表示不同的類。圖5b為分割后的各個類的數據可視化圖。根據每類點云數據中包含點云數量判斷該類是不是葉片,大于240的類記為葉片點云簇,小于或等于240的類丟棄。提取葉片點云簇數據,第r個單葉片點集記為Pleaf(XLr,YLr,ZLr),圖5c為提取的葉片三維點云可視化圖。

圖5 提取單葉片過程Fig.5 Process of extracting single leaf
2.3 提取枝條中心線
蘋果樹冠層葉片按照圖3所示葉序方式增加新葉片[20],且以枝條為中心展開,將蘋果樹冠層營養枝三維點云收縮,擬合生成直線,即枝條中心線。
將枝條三維點云沿著垂直于地面方向(Z軸方向)按照相同的厚度均勻切片。切片厚度以大于葉片厚度為宜,本文點云數據切片厚度為5 mm,并正投影到垂直于Z軸的平面(XOY面),遂在正投影面得到三維點云切片的正投影點集SXOYi,每個點都由2維實數組成。K-means聚類時,目標函數J表示為
(2)

cj——聚類中心點

圖6是提取枝條中心線過程,其中圖6a是枝條三維點云任意一層的正面投影的聚類迭代結果,紅色點為SXOYi聚類中心坐標。
圖6 提取枝條中心線過程Fig.6 Progress of extracting branch line
將聚類中心坐標的數量設置為m,則聚類中心坐標m×2的二維數組為
以第i個切片Z軸向坐標為數值,創建一維m×1向量
Ca=(zm,zm-1,…,z1)T
組合C2D和Ca得到m×3的三維數組
計算C3D任意3個相鄰點的中值,記錄中值點的數值替換這3個點,如圖6b所示,直到剩下2個中值點便停止迭代,并輸出這2個點的坐標PCA(xCA,yCA,zCA)和PCB(xCB,yCB,zCB)。
枝條中心線的點向式方程L為
(3)
式中 (x,y,z)——直線L上任一點坐標
(m,n,p)——直線L的方向向量
t——直線參數方程的參數
2.4 提取葉基
計算任意點Pleafi(XLri,YLri,ZLri)∈Pleaf到直線L的距離
(4)
葉基的坐標為d(Pleafi,L)最小值對應的Pleaf的坐標PLSL。
2.5 模型三維重建
按照營養枝條的生長位置,將蘋果樹冠層三維點云體素化,圖7a中每個綠色的立方體包含的點云為一個枝條體素,提取枝條體素中的葉基坐標,構成點集PLSL,圖7b是點集PLSL的可視化點模型。
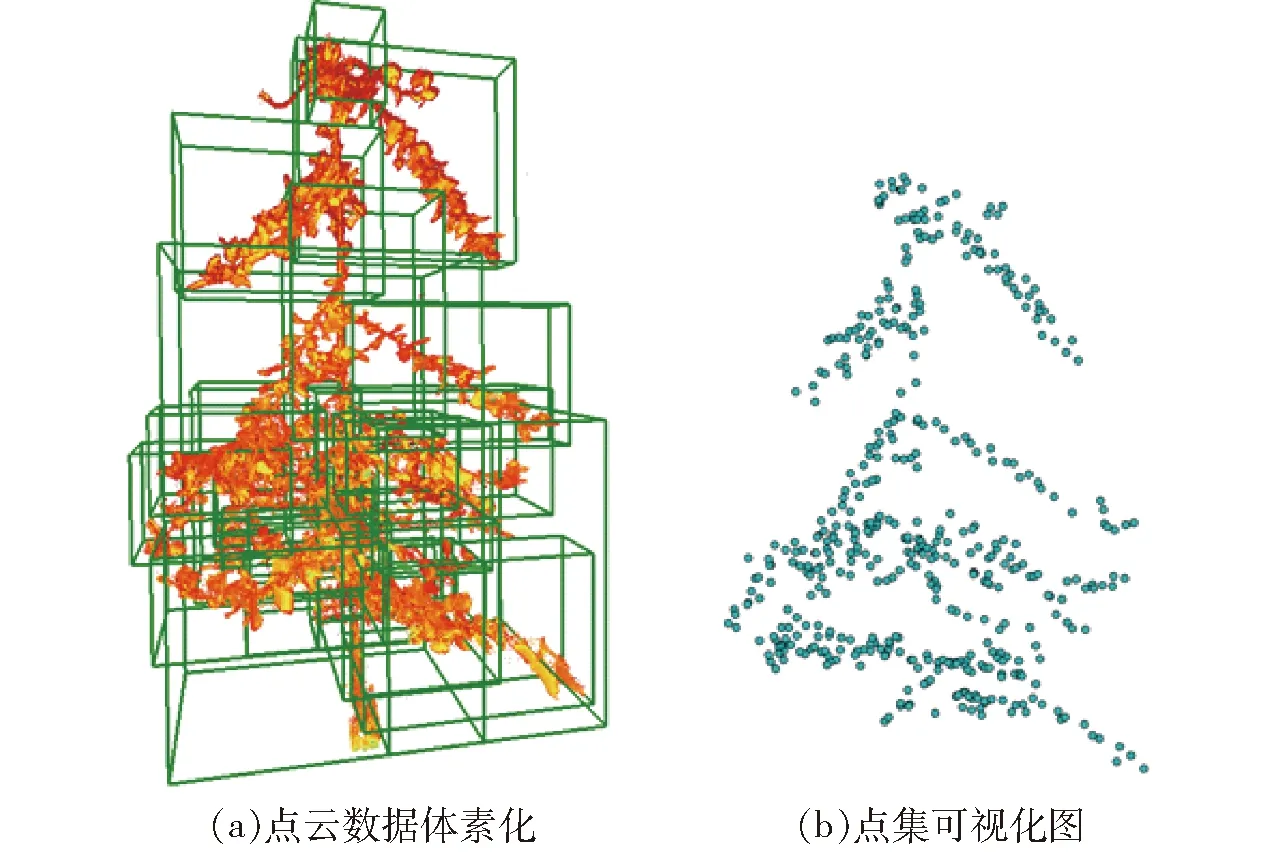
圖7 點模型Fig.7 Point models
栽培管理技術、蘋果品種、中間砧、葉片在枝中的生長位置、萎蔫程度等都會影響蘋果樹葉片分布和形態[29]。研究表明,葉片縱橫比和葉面積是描述蘋果葉片關鍵指標[30]。為了較精確地獲取蘋果樹葉片縱橫比建立葉片模板,隨機選取9月獲取的蘋果樹葉片500枚,借助Geomagic軟件精確測量葉片長度和寬度,計算葉片縱橫比,取葉片縱橫比平均值25∶18。同時,借助Geomagic軟件生成葉片實體造型,采用該軟件計算面積功能,計算單個葉片表面積,取算術平均值49.9 cm2作為葉片表面積,以葉基為定位點,插入葉片模板,建立基于葉基的蘋果樹冠層點-葉模型。
葉片在冠層中的空間位置由6個自由度確定[25,31],即空間3個坐標(葉基)表示葉片空間形態的歐拉角(高度角Rot(Y)、轉角Rot(X)和方位角Rot(Z))。其中,富士蘋果80%以上葉片歐拉角數值: Rot(Y)為[-30°,60°]、Rot(X)為[-60°,60°]、Rot(Z)為145°。蘋果樹葉片以Rot(Z)為145°在枝干上呈螺旋分布。
為了快速重建點-葉三維模型,將歐拉角簡化,且以直線代替葉片中脈空間彎曲,忽略葉片邊緣曲率,葉片模板近似為六邊形[7],六邊形面積和縱橫比與葉片表面積相同。葉片模板由6個點組成,受到以下條件約束:六邊形平面與XOY平面平行,6個點按照順時針方向定義,如圖8a所示。

圖8 點-葉模型重建過程Fig.8 Progress of reconstruction of point-leaf model
葉片模板插入步驟如下:
(1)初始化步長ZPLSL(i+1)-ZPLSL(i)。
(2)PLSL中提取第1個點坐標PLSL(x,y,z),插入六邊形,六邊形A點坐標為PLSL(x,y,z),其余點相對于A坐標分別為:B(x+0.27,y-0.36,z)、C(x+0.65,y-0.36,z)、D(x+1,y,z)、E(x+0.65,y+0.36,z)、F(x+0.27,y+0.36,z),6個點按照順序連接封閉曲線。
(3)葉片模板在XOY面以A點為中心旋轉Rot(Z),每隔一個步長旋轉145°。Rot(X)為[-60°,60°]之間隨機分布,Rot(Y)為[-30°,60°]之間間隔15°分布。
(4)綠色填充六邊形空間,步長加1,重復上述步驟,遍歷所有點,構建出點-葉模型如圖8c所示。
3 結果與分析
3.1 蘋果樹不同生長時期提取葉基結果
截取樹冠中營養枝數據,對葉基提取算法的有效性、運行參數等進行驗證和分析。處于不同生長階段的蘋果樹冠層和葉、果等器官數量和大小不同。圖9為不同生長時期提取葉基效果圖,圖中不同顏色代表不同葉片。從圖中可見,本文提出的方法可以提取蘋果樹不同生長階段的葉基,圖9a、9b分別是生長期(6月)和葉幕穩定期(9月)葉基提取結果。從圖中可以看出,每個葉片都被完整分割,葉基LGS_01、LGS_02、LGS_03、SGS_04、SGS_05、SGS_06、SGS_07等均可提取。
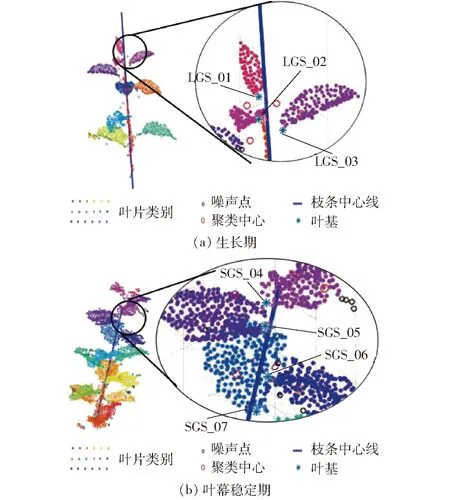
圖9 不同生長時期提取葉基結果Fig.9 Leaf spatial location extraction results at different growth stages
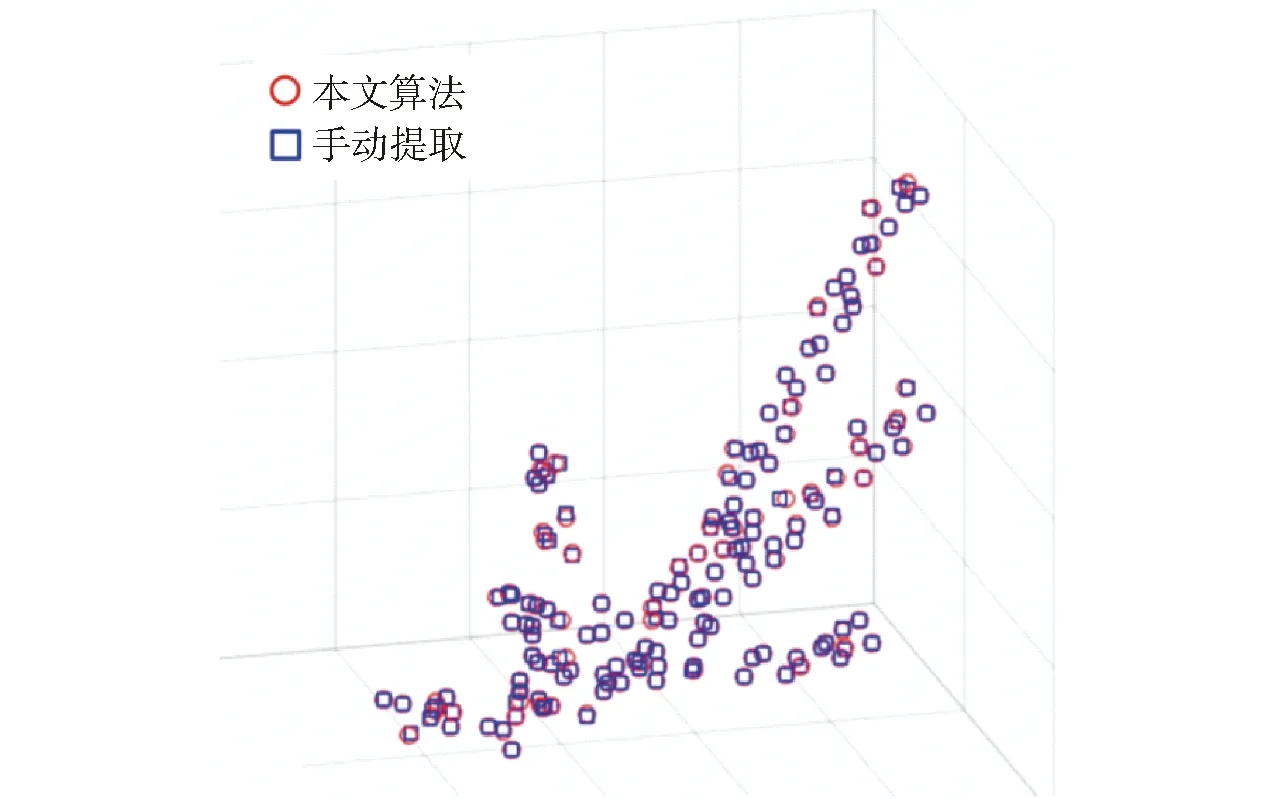
圖10 手動提取結果和本文算法提取結果可視化圖Fig.10 Visualization of two leaf spatial location extraction methods
3.2 本文算法提取葉基結果
為了驗證本文葉基提取算法的適應性,在Realworks 12.0軟件中手工提取葉基的空間坐標,與自動提取葉基坐標算法進行比較。圖10是2017年9月蘋果樹冠層營養枝葉基的自動提取與手工提取結果對比可視化圖。由圖10可見,2種測量方法重合度較好。
圖11是手動提取葉基和利用本文算法提取葉基坐標的誤差分析圖,可以看出,相對于手動提取,二者提取的坐標平均歐氏距離為1.41 mm。

圖11 手動提取結果和本文算法提取結果誤差比較Fig.11 Error of leaf spatial location space coordinates
3.3 點-葉模型與光模型融合下的冠層光截獲計算
VegeSTAR是根據植物數字化冠層模型進行光截獲模擬計算的軟件[32],可計算灌木、森林幼苗、蘋果樹的光截獲。VegeSTAR軟件將天空等分為面積相等的46個立體角的龜背天空[33],并將龜背天空46個方向計算的光截獲值STAR(Silhouette to total area ratio)加權計算得到冠層固定點時間內的STAR值。
將建立的點-葉模型導入VegeSTAR軟件,通過設置葉片面積和形狀,輸入葉基采集果園位置的經緯度和采集時間,可計算出蘋果樹光照射葉片投影面積和總面積,進而得到蘋果樹冠層的光截獲均值。
圖12為點-葉模型與VegeSTAR融合計算冠層光截獲結果,圖12a中將點-葉模型按照冠層高度,每間隔0.1 m以不同顏色區分,圖12b為冠層不同高度的葉面積和光截獲值計算結果。
在數據采集、模型重建、計算STAR值一系列過程中,數字化儀模型重建1 500點左右的樹冠三維模型需要2 d[34],本文實例中點-葉模型對應研究對象為3 a蘋果樹,與文獻[34]樹形相同,葉基數量為633點,重建點-葉模型需要2~3 h,三維重建效率有了較大提高。表1列出2019年9月3棵3~4 a紡錘體蘋果樹,按照不同方法對其進行三維重建所需要時間。

圖12 點-葉模型與VegeSTAR融合計算冠層光截獲結果Fig.12 Point-leaf model with VegeSTAR fusion calculation canopy STAR
表1 三維重建時間
Tab.1 3D reconstruction time

樣本編號葉基數量文獻[34]方法/h本文算法/hA1963183.5A2691153.0A31200215.0
4 結論
(1)提出葉基自動提取方法,可自動提取蘋果樹冠層生長期、葉幕穩定期葉基,試驗分析表明,本方法適用于生長期和葉幕穩定期的葉基提取,精度較高。相對于人工利用Realworks提取葉基坐標,二者之間的平均歐氏距離為1.41 mm。
(2)以葉基為基礎建立空間點模型,并以此為基礎建立點-葉模型,利用點-葉模型,在VegeSTAR光模型中進行光截獲計算,相對于利用文獻[34]構建模型方法,較大程度提高了三維結構重建效率。
(3)受冠層內部器官相互遮擋的影響,樹膛內部葉片的三維點云不完整,因此本文提出的方法適用于冠層直徑較小的蘋果樹(如樹齡小于3 a)。對于直徑較大的蘋果樹冠層,可以采用手持式掃描儀獲取樹膛內部三維點云補償。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19