農業機械導航技術研究進展
2020-04-27 09:36:08季宇寒李世超曹如月徐弘禎張振乾
農業機械學報 2020年4期
張 漫 季宇寒 李世超 曹如月 徐弘禎 張振乾
(中國農業大學現代精細農業系統集成研究教育部重點實驗室, 北京 100083)
0 引言
農業機械自動導航技術是實施精細農業的基礎,可以有效減輕農機操作人員的勞動強度,提高作業精度與作業效率[1-2]。目前,農機自動導航已廣泛應用于耕作、播種、施肥、噴藥、收獲等農業生產過程[3]。
經典的農機自動導航關鍵技術包括導航位姿信息獲取、導航路徑規劃和導航控制等。導航位姿信息的準確、可靠獲取是路徑規劃與車體控制的前提條件[4-5];優化的導航路徑可有效減少資源浪費,如減少重復、遺漏作業,減少地頭轉彎路徑等,提高作業效率[6-7];快速、穩定的導航控制能夠應對農田的復雜路面環境,實現對導航路徑的準確跟蹤[8-9]。國內外學者針對以上技術進行了廣泛而深入的研究,取得了豐碩的成果。
隨著農機作業速度的不斷提高、作業任務的逐漸復雜,經典的農機自動導航技術已難以應對新形勢下的安全性挑戰和突破效率瓶頸。因此,智能農機導航技術逐漸成為研究熱點。智能農機導航在經典農機自動導航框架的基礎上,結合傳感器、物聯網、云計算、深度學習等技術,旨在提高農機在自動導航作業過程中的安全性與協同性,其核心技術包括自主避障與多機協同等。自主避障可實現對復雜農田環境中的機器、行人等障礙物的識別與避讓,保證人機安全作業;多機協同可在復雜作業需求下,通過對農機狀態信息監測,進行任務調配、多機路徑規劃,提高農機機群整體作業效率。
本文分析國內外農機自動導航技術研究進展,在對農機定位測姿、路徑規劃、運動控制等經典導航關鍵技術進行總結分析的基礎上,闡述自主避障和多機協同等智能導航關鍵技術的發展趨勢,并結合無人農場與智慧農業,對農機智能導航技術未來應用場景進行展望。
1 自動導航關鍵技術
1.1 定位測姿
國內外學者針對全球導航衛星系統(Global navigation satellite system, GNSS)、慣性導航系統(Inertial navigation system, INS)和機器視覺(Machine vision, MV)導航系統進行了深入的研究,主要進展如下。
1.1.1全球導航衛星系統
目前,全球導航衛星系統主要包括美國的GPS系統(Global positioning system)、俄羅斯的GLONASS系統(Global navigation satellite system)、歐盟的Galileo系統和中國的北斗導航衛星系統(BeiDou navigation satellite system, BDS)。其中,北斗導航系統自2012年正式向亞太大部分地區提供區域服務,2019年北斗導航系統全球組網進入沖刺期,2020年可按計劃提供全球范圍的定位、導航、授時等服務。閆飛等[10]采用多頻三星接收機和多星座接收模塊,通過BDS和GPS數據,得到更多的衛星可見數和更穩定的信噪比。
為實現農機自動駕駛過程中的精細作業,需要獲取分米級甚至厘米級的定位數據,常采用差分GNSS技術,即通過將位置已知基準站測量的偽距修正值或相位信息發送到移動站來提高精度。OKSANEN等[11]設計了一臺采用GNSS信號為引導的四輪驅動農業拖拉機,考慮了當前位置、速度、航向和調控角度對導航的影響。羅錫文等[12]基于東方紅拖拉機,采用自主差分方式,開發了基于RTK-DGPS的自動導航控制系統,設計了導航控制器、轉向控制器和轉向裝置等。
通過GNSS接收機還可得到農機的航向信息,根據測量原理,分為雙天線測向法和單天線測向法,表1對兩種GNSS測向方法進行了對比。
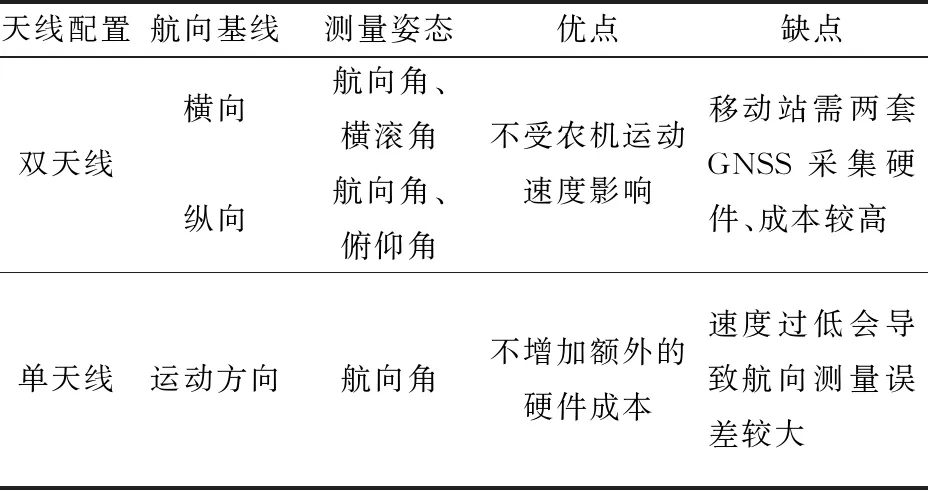
表1 GNSS測向方法Tab.1 Heading measurement methods based on GNSS
O’CONNOR等[13]將RTK-GPS應用于農機導航中,并使用了四天線GPS系統為拖拉機提供位姿信息。劉兆朋等[14]在高地隙噴霧機頂端橫向安裝GNSS雙天線,可同時實現對位置信息、航向信息的直接測量。
GNSS可提供全天時、全天候的絕對位置與航向信息,但極端天氣或遮擋造成的GNSS信號丟失,限制了其在復雜農田環境中的應用。
1.1.2慣性導航系統
慣性導航系統是以陀螺儀和加速度計為敏感元件的相對參數解算系統,不依賴于外部信息、也不向外部輻射能量,通過航跡推測獲取位置與姿態。
(1)陀螺儀
陀螺儀基于慣性原理,輸出參考軸向的角速度,通過積分計算出角度。目前,陀螺儀主要包括機械陀螺儀、光纖陀螺儀和微機電陀螺儀。表2對比了3種陀螺儀的特性。

表2 3種陀螺儀特性對比Tab.2 Comparison of characteristics of three kinds of gyroscopes
由于陀螺儀測量角度的本質在于對角速度積分,故具有漂移誤差,且陀螺儀受溫度影響較大,所以需要對溫度變化進行補償。
(2)加速度計
加速度計基于慣性原理,可輸出參考軸向的加速度,通過積分計算出速度,通過二次積分計算出位移。加速度計具有較好的偏差穩定性,以及對沖擊、振動和溫度適應性,且成本較低,因而廣泛應用于慣性測量系統。
(3)磁偏計
磁偏計通過檢測地球磁場,輸出行進方向與磁北的偏角,是航姿參考系統(Attitude and heading reference system, AHRS)等設備的重要航向參考。磁偏計的主要誤差包括:自身誤差、地磁場變化、周圍環境磁效應等,需要進行磁場映射校準,以降低環境干擾。
(4)捷聯慣導
捷聯慣導(Strapdown inertial navigation system, SINS)是典型的INS設備,其將陀螺儀、加速度計、磁偏計按笛卡爾空間直角坐標系三軸方向組合,構成復合式傳感器。表3為3種捷聯慣導的特性對比。

表3 3種捷聯慣導特性對比Tab.3 Comparison of characteristics of three kinds of SINS
NOGUCHI等[15]提出了一種由RTK-GPS、光纖陀螺儀和慣性測量裝置組成的導航傳感器,同時獲取農機的位置、航向、姿態信息,并校正偏差。朱忠祥等[16]設計了基于加速度計、陀螺儀、電子羅盤的航跡推算系統,并結合GPS定位,通過卡爾曼濾波器估計位姿,獲得了厘米級定位精度。
INS可提供高精度、高頻率姿態數據,通過航跡推測獲得位置,但溫度與積分產生的漂移導致其長時間工作精度無法保證。
1.1.3機器視覺導航系統
機器視覺具有成本低、信息豐富等特點,適用于不規則地塊或信號遮擋環境。采用視覺導航時,通常將視覺傳感器安裝在農機駕駛室上方,采集農機前方圖像信息,通過預處理、作物行檢測,最終提取導航基準線。
(1)圖像預處理
農田環境下天氣、雜草、陰影、非目標區域等因素會對作物行檢測產生干擾,直接檢測較難獲得理想效果。通過特殊波段視覺傳感器[17-18]或灰度化特征因子[19-20]可增大目標區域和非目標區域的顏色區分;通過將RGB色彩模型轉換為HSV、HSI、YCbCr等色彩模型[21-22]可消除部分陰影干擾;通過合理設置圖像中待處理的感興趣區域(Region of interest,ROI)可減少非目標作物行的干擾,同時降低計算量[23]。
(2)作物行檢測
目前國內外對于作物行提取方法已展開了大量研究,主要包括垂直投影[24]、Hough變換[25]、線性回歸[26]、立體視覺[27]等,特點如表4所示。
目前,視覺導航技術已經應用到自動施藥[28]、自動除草[29]、自動收割[30]等方面,但由于農田環境對圖像采集穩定性的影響,仍存在圖像模糊、信息缺失等問題,視覺導航技術魯棒性需要進一步提高。
1.1.4多傳感器信息融合
單一傳感器都有一定的局限性,為提高導航定位精度和可靠性,常采用多傳感器融合。多傳感器信息融合,指利用各傳感器的優勢特征,構成數據冗余或數據互補特性,提高測量結果的魯棒性和準確性。
多傳感器信息融合是一個多層次、多級別的處理過程。根據數據和處理的復雜程度來對融合級別分類,可分為數據級融合、特征級融合和決策級融合,性能分析如表5所示。3個融合級別各有利弊,需要根據系統所需的融合精度與實時性需求合理選擇融合級別。
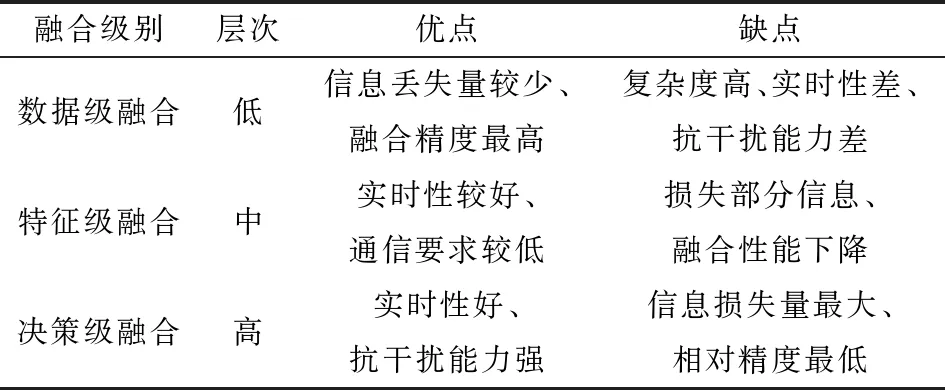
表5 多傳感器融合級別Tab.5 Multi-sensor fusion level
在農田復雜的非結構化環境中,地形、光照、氣候條件多變,使用GNSS、INS、MV單獨提供的農機位姿信息均有一定局限性,如:GNSS受遮擋產生信號丟失、INS隨時間不可避免的漂移、MV受外界光照和陰影的影響等。因此,單傳感器難以應對復雜的農田環境,多傳感器間的數據融合是必要手段。表6對3種定位測向傳感器的特點進行了分析比較。
由表6可知,GNSS/INS具有良好的數據互補特性,適用于農機在農田環境中的定位測姿。劉進一等[31]采用全球導航衛星系統、微機械慣性測量單元及航位推算相融合的組合導航定位系統,通過改進的自適應系統協方差矩陣的擴展卡爾曼濾波算法融合導航。張京等[32]提出了一種以GNSS信號與航向角變化幅度信息為指導的INS與GNSS航向信息融合策略。
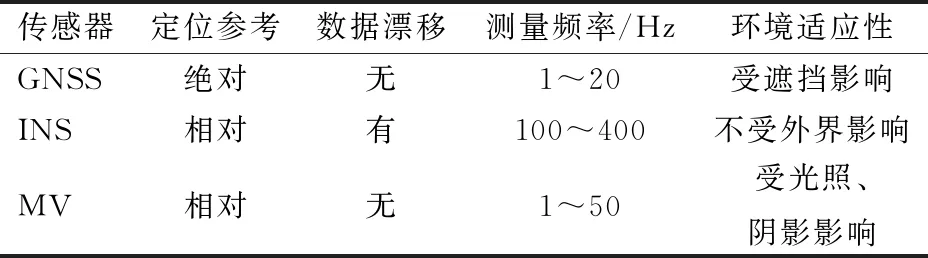
表6 3種傳感器特點Tab.6 Characteristics of three kinds of sensors
多傳感器信息融合的幾種主要方法如表7所示。
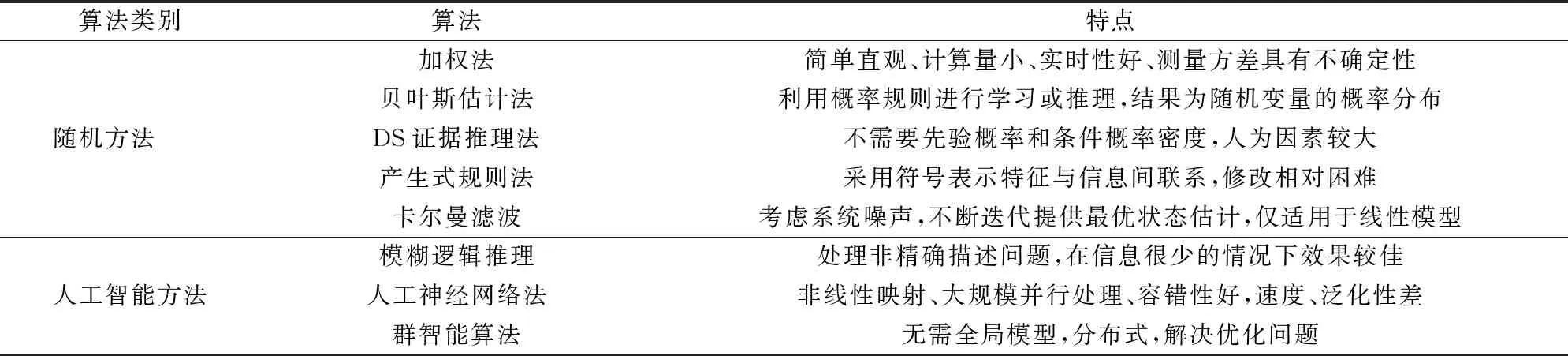
表7 多傳感器信息融合算法及其特點Tab.7 Characteristics of multisensor fusion algorithm
目前,在農機導航系統中應用的信息融合方法,應用廣泛的是卡爾曼濾波與粒子濾波。
表8歸納了卡爾曼濾波器及粒子濾波器的特性。
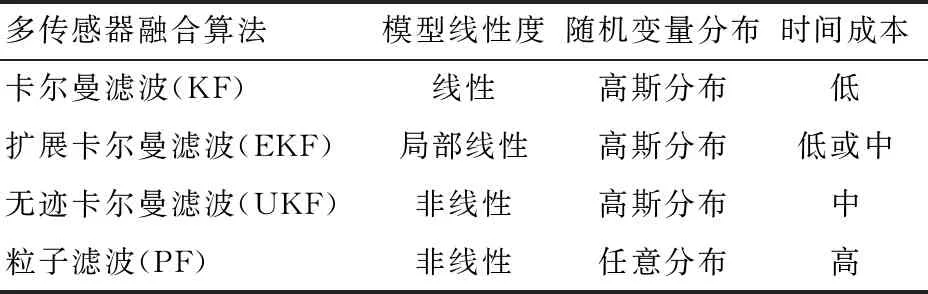
表8 融合算法特性對比Tab.8 Comparison of fusion algorithms
注:擴展卡爾曼濾波時間成本取決于雅可比矩陣求解難易程度。
1.2 路徑規劃
對于復雜農田作業環境下的農業機械,路徑規劃是農機根據已知作業信息和環境信息,并結合自身傳感器對動態環境信息的感知,按照某一性能指標(如距離、時間等),自行規劃出一條安全無碰撞的運動路線,同時高效地完成作業任務。根據環境信息的掌握情況,路徑規劃可分為全局路徑規劃和局部路徑規劃[33]。
1.2.1全局路徑規劃
全局路徑規劃是在環境信息已知的情況下,基于先驗完全信息的路徑規劃方法。全局路徑規劃算法注重尋求最優解,設計目標是使規劃路徑盡可能達到最優,主要包括可視圖法[34-35]、切線圖法[36]、Voronoi圖法[37]、自由空間法[38]、柵格法[39]等,幾種算法的特點如表9所示。
1.2.2局部路徑規劃
局部路徑規劃是在環境信息完全或部分未知的情況下,根據傳感器信息獲取農機自身與環境障礙物信息進行的實時路徑規劃。局部路徑規劃算法注重路徑安全性與實時性,以提高農機避障能力。目前已有方法主要包括動態窗口法[40]、人工勢場法[41-42]、模糊控制算法[43-44]、人工神經網絡[45-46]、A*算法[47-48]、遺傳算法[49]、模擬退火算法[50]、蟻群優化算法[51-52]和粒子群算法[53]等,幾種算法的特點如表10所示。

表9 全局路徑規劃算法對比Tab.9 Comparison of global path planning algorithms
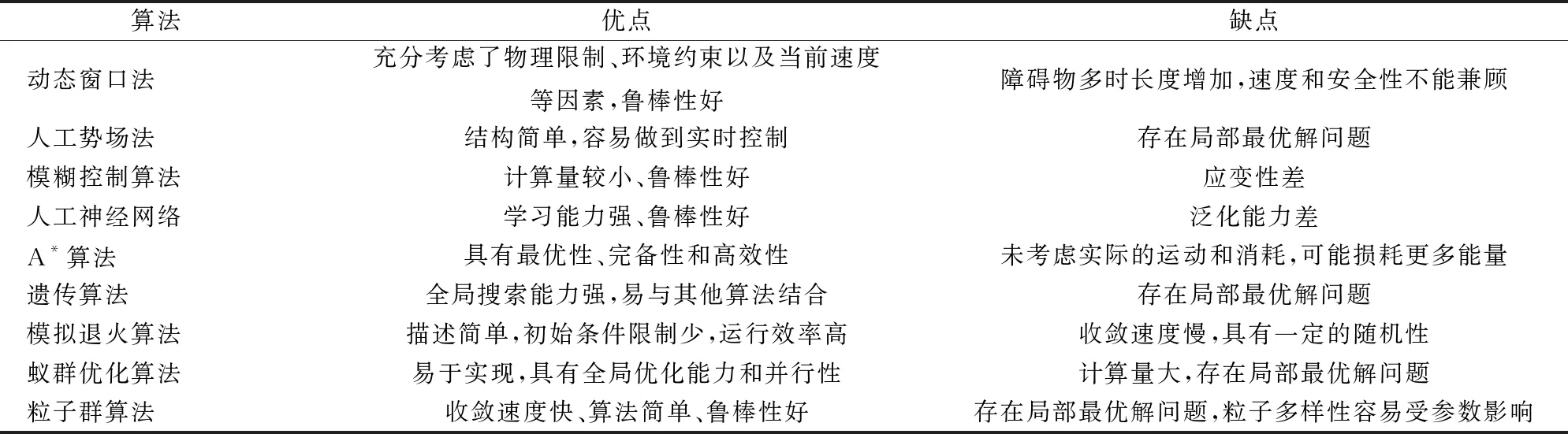
表10 局部路徑規劃算法對比Tab.10 Comparison of local path planning algorithms
通過對比分析可知,全局路徑規劃算法和局部路徑規劃算法在實時性、魯棒性和安全性等方面各有特點,實際使用時,要根據具體的作業環境和作業要求采用不同的路徑規劃方法,從而規劃出一條安全高效、全局近似最優的作業路徑。
1.3 運動控制
經過規劃的導航路徑是農機作業的期望軌跡,為實現導航路徑的跟蹤控制,需要在農機運動模型、導航決策控制以及轉向與制動控制等方面開展研究。
1.3.1運動模型
在復雜農田環境下,運動模型的準確性將直接影響農機導航作業的精度。農機導航廣泛應用的運動學模型有阿克曼四輪車模型和簡化二輪車模型,其特征如表11所示。
由表11可知,阿克曼四輪車模型適用于更復雜的水田作業場景,在旱地作業中,簡化二輪車模型具有簡單實用的優勢。陳哲明等[54]針對傳統四輪轉向系統,根據阿克曼轉向定理,設計了能夠改善轉向運動協調性和操縱穩定性的控制策略。白曉平等[55]提出了一種農機導航自校正模型控制方法,采用簡化二輪車模型設計了控制律,提高了穩定性和快速響應性。
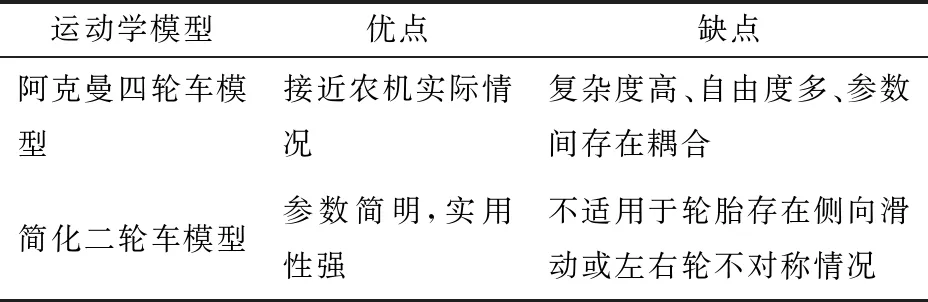
表11 農機運動學模型特征對比Tab.11 Comparison of kinematic model of agricultural machinery
1.3.2導航決策控制
導航決策控制是導航系統的核心,期望轉向角的決策是否合理,直接影響后續的轉向執行動作,進而影響整個導航系統的性能,其基本原理如圖1所示。
由于農田作業環境復雜多變,農機自身大延遲、大慣性和高度非線性的特征,使導航決策控制算法需具備一定的自適應性和魯棒性。常用的農機導航控制方法包括PID控制、模糊控制、純追蹤控制、滑模變結構控制、最優控制和模型預測等,對比分析如表12所示。丁幼春等[56]基于免疫PID方法設計了小型履帶式油菜播種機導航控制器,提升了響應速度,并減小了跟隨偏差。張雁等[8]針對自主導航水稻直播機,構建了一種模糊自適應控制方法,提高了導航精度和動態性能。王輝等[57]采用預瞄追蹤模型進行農機導航控制,提高了路面適應性和上線動態性能。焦俊等[58]構建了等效控制和切換控制組成的自適應滑模控制,提升了導航精度。李逃昌等[59]基于Frenet坐標系構建了運動學模型,并根據反饋線性化和線性二次型調節器設計了最優控制律。劉正鐸等[60]基于線性模型預測控制方法,將松弛因子引入目標函數,實現了偏差快速回調的優化控制。
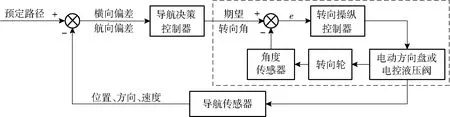
圖1 導航決策控制原理圖Fig.1 Schematic of navigation decision control

表12 控制方法特征比較Tab.12 Comparison of control method characteristics
綜上,傳統的算法大多存在一些問題,如:PID控制由于其控制參數固定,當遇到非線性、時變和結構不確定系統,控制效果并不理想;模糊控制規則需要根據專家經驗進行判定;滑模變結構控制方法需采用一定手段消弱抖振。針對這些問題,也有研究人員提供了新的思路,嘗試將不同的控制方法結合,優勢互補以得到更好的控制效果。唐小濤等[61]采用模糊算法動態確定純追蹤模型的前視距離,實現了精準平穩的跟蹤效果。籍穎等[62]為了消弱滑模控制的顫抖現象,采用模糊控制方法改進了滑模變結構控制系統,提高了系統控制準確性和魯棒性。
1.3.3轉向與制動控制
(1)轉向控制
轉向控制系統是導航系統的執行部分,其原理如圖1中虛線框所示。目前廣泛應用的轉向方式包括電動方向盤轉向和電控液壓閥轉向,性能對比如表13所示。

表13 轉向控制系統性能對比Tab.13 Comparison of steering control system
在農機平臺,電動方向盤相對電控液壓轉向,容易改裝且便于移植,而電控液壓轉向的控制精度較高。張漫等[63]通過PLC和步進電機控制方向盤轉動,進而實現農機自動導航。李偉等[64]為提高噴霧劑的機動性能和作業效率,設計了全液壓多輪轉向系統,并提出了基于PID控制方法的四輪轉向系統控制方法。
(2)制動控制
在導航過程中,制動控制模塊一方面用于緊急情況下的及時停車,另一方面用于農機作業行駛速度的協助控制。王致情[65]使用數字信號處理器的I/O端口輸出高低電平,并配合繼電器電路控制電動推桿的正反轉,實現了推桿對制動踏板的往返控制。
2 智能導航技術
近年來,隨著傳感器技術、深度學習算法、物聯網和云計算等的突破性進展,智能農機導航及其相關技術成為新的研究熱點。
自主避障與多機協同技術是智能導航技術重要的研究方向[66]。前者保證了智能農機在復雜農田環境中的作業安全,后者提高了智能導航農機的作業效率。本文主要分析自主避障與多機協同兩項技術的研究現狀與發展趨勢。
2.1 自主避障
自主避障技術可使農機在復雜農田環境中,僅通過自身車載傳感器感知、檢測、識別障礙物,為局部避障路徑的合理規劃提供可靠依據。
農田是典型的非結構化環境,具有地面不平整、障礙物種類多等特點,增加了傳感器環境感知、障礙物檢測與識別、避障行為決策等環節的難度。農田環境感知傳感器及性能分析如表14所示。

表14 農田環境感知傳感器及性能分析Tab.14 Performance analysis of farmland environmental sensors
通過對比上述傳感器的性能、成本和適用情景等,歸納激光雷達與RGB相機在農田數據采集,以及障礙物檢測、識別、跟蹤的相關研究成果與發展趨勢。
2.1.1激光雷達
激光雷達(Light detection and ranging,LiDAR)探測周圍環境中目標點與自身的距離,結合測量角度,獲得目標點的極坐標位置。表15為激光雷達分類對比。
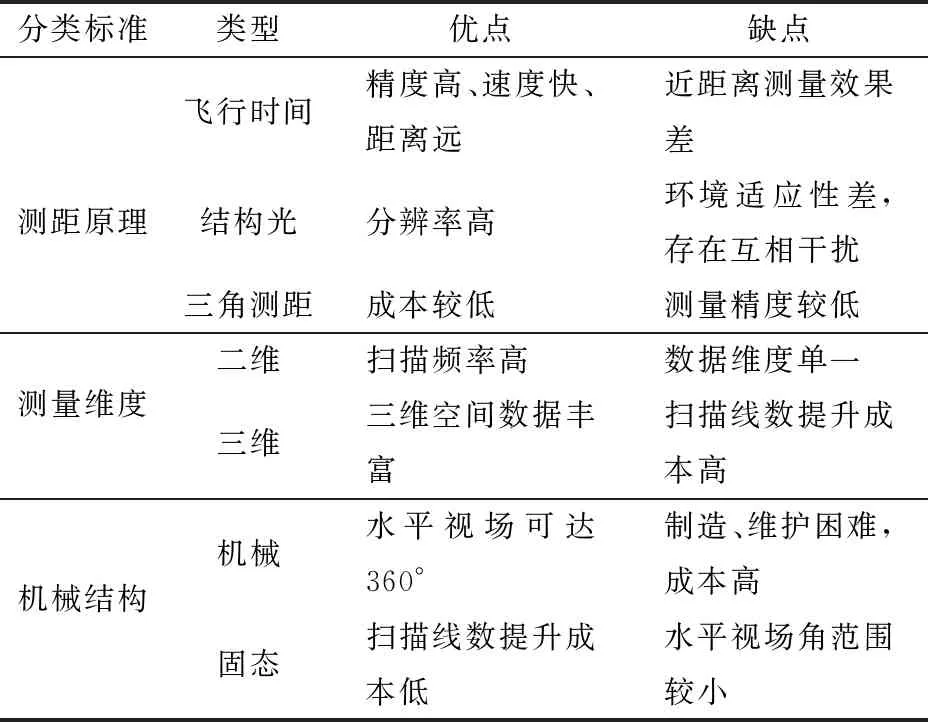
表15 激光雷達分類及對比Tab.15 Classification and comparison of LiDAR
由表15可知,基于飛行時間原理的三維機械式激光雷達,能夠適應農田復雜多變的光照情況,并提供高精度、高速率、廣視角的三維點云。但其成本較高,國內外的智能農機平臺多采用二維激光雷達[67-68]。目前,研發高線數、低成本的固態三維激光雷達已成為行業發展趨勢。
激光雷達采集的點云,需先進行點云配準、點云去噪等預處理,再通過分割、聚類等算法檢測障礙物,最終應用分類、跟蹤算法實現障礙物識別。
(1)點云配準
激光雷達采集的原始點云數據,是以視點為原點的極坐標點,需進行時間配準和空間配準,得到全局一致點云。時間配準可保證激光雷達與GNSS/INS采集時間的同步性,空間配準利用農機的位姿信息對點云進行坐標變換,獲得全局一致的點云。點云配準為農田動靜態障礙物的識別及動態障礙物的跟蹤提供了可靠數據基礎。季宇寒等[69]搭建了基于三維激光雷達的農田環境信息采集系統,通過在農機上安裝GNSS/AHRS獲取位姿信息,對GNSS定位和點云數據偏差進行姿態補償。
(2)點云去噪
激光雷達受自身與外界因素的影響,點云存在噪聲,需進行濾波去噪。點云噪聲主要表現為:漂移點、孤立點、冗余點、混雜點等。其中,前3種噪聲具有較明顯的密度或距離特征,比較容易去除。混雜點與正確點云易混淆,通常采用平滑算法進行修正。表16對點云平滑濾波算法進行了總結。
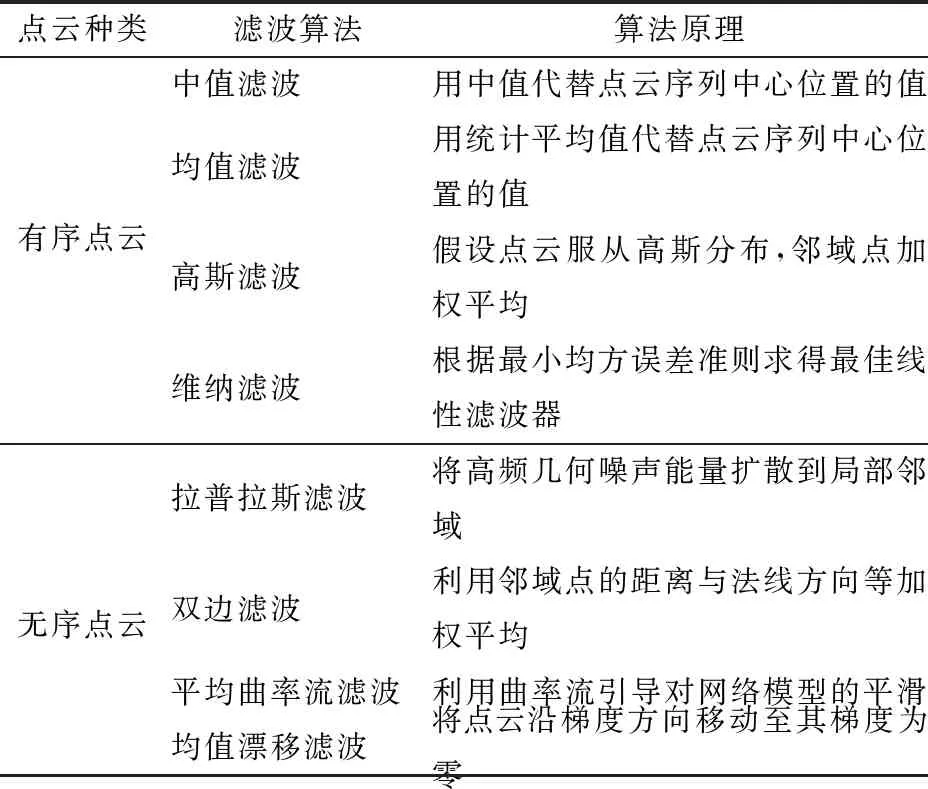
表16 點云平滑濾波算法Tab.16 Filtering algorithms for smoothing point cloud
由表16可知,有序點云的點與點之間存在拓撲關系,濾波算法簡單高效,實時性好。無序點云的點分布散亂,濾波算法復雜,實時性差。智能農機自主避障對實時性要求較高,有序點云濾波算法有更實際的研究與應用價值。
(3)點云分割
經過預處理的點云仍可能包含非障礙點云,如:超出距離范圍的點云、農機自身的點云、地面點云等,需進行分割篩除。表17歸納了非障礙點云分割篩除的算法。
由表17可知,對前兩類非障礙點云,使用合理的經驗閾值分割即可獲得較好效果。地面點云與障礙物點云緊密連接,干擾后續點云聚類效果。國內外學者針對不同的場景提出多種方法,如:斯坦福大學的stanley無人車,先通過投影法獲得前方道路點云高度柵格圖,后利用相鄰柵格的高度差和一階馬爾科夫模型實現地面點云的快速分割[70]。董敏等[71]提出了基于三維網格圖的點云分離方法,通過找到地面基準點并將地面屬性蔓延至其他各點,實現地面點的分離。
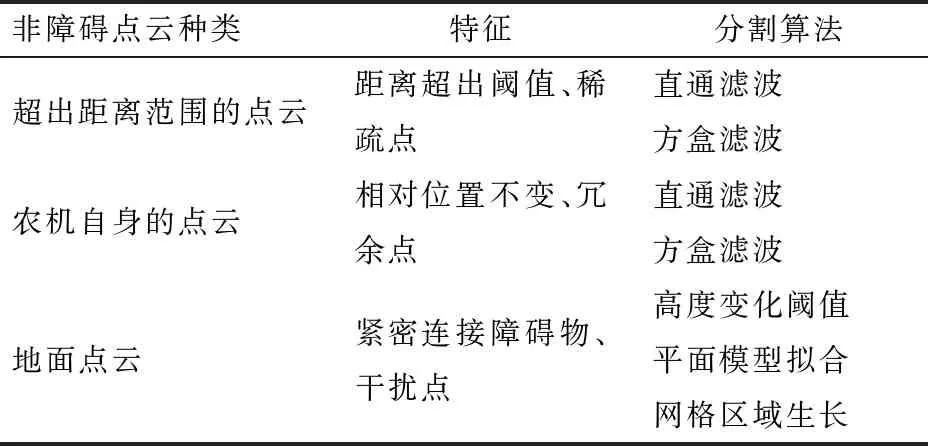
表17 點云分割算法Tab.17 Segmentation algorithms for removing outlier of point cloud
(4)點云聚類
經過地面點云分割的點云,按照特定的聚類規則分成相互獨立的簇,即完成農田障礙物的檢測。聚類算法根據聚類規則的不同,分為基于劃分、層次、密度、模型等,表18總結了點云聚類算法及其特點。
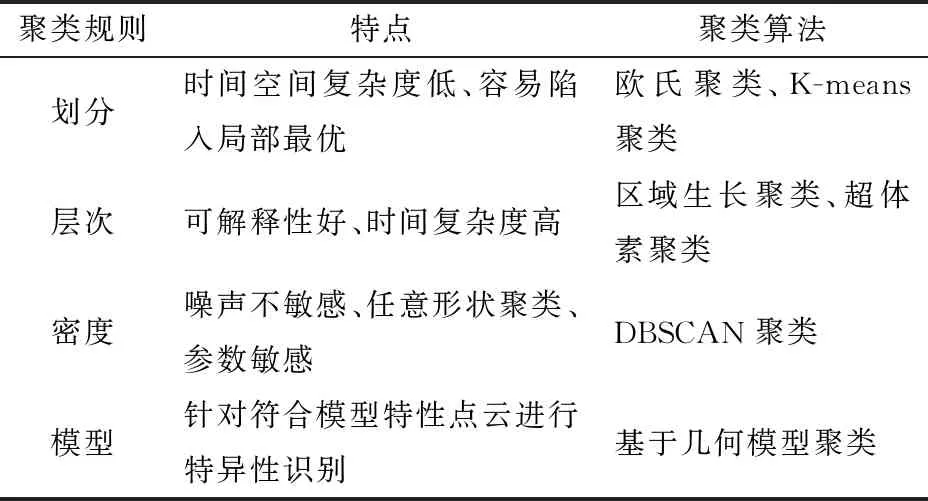
表18 點云聚類算法Tab.18 Clustering algorithms of point cloud
國內外學者主要采用基于劃分和基于密度的聚類方法,前者具有很高的時間空間效率,后者在參數合適的情況下,具有良好的密度適應性并具有一定抗噪能力。基于層次的聚類主要應用于離線系統下的點云聚類。基于模型的點云聚類主要應用于已知點云分布模型的前提下。BEHLEY等[72]針對三維點云數據,提出了基于改進的索引八叉樹的半徑鄰域檢索法,通過在聚類過程中對不相關子樹進行剪枝,提高半徑鄰域檢索的速度。劉家銀等[73]針對非結構化環境的負障礙物檢測問題,根據貝葉斯法則進行多幀特征點對融合,采用DBSCAN對融合后點對進行聚類和過濾。
(5)障礙物分類
通過聚類獲得障礙物團簇,為進一步確定障礙物的類別,需要對聚類團簇進行特征提取與分類。根據選取特征是否是人為定義,可將特征分為人工特征與學習特征。表19歸納了點云團簇的人工特征及其特點。
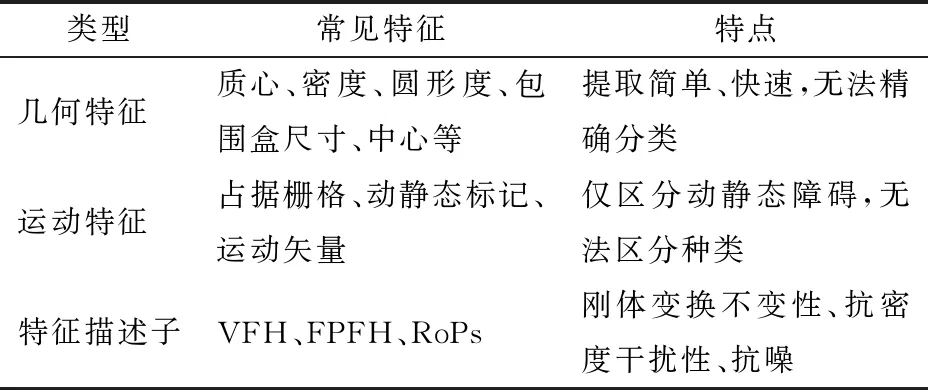
表19 點云團簇的人工特征Tab.19 Artificial characteristics of point cloud clusters
學習特征是通過有監督的機器學習算法自動歸納的特征。目前,點云分類應用的傳統機器學習分類器包括Adaboost[74]、SVM[75]等。隨著深度學習發展,直接使用三維點云數據進行訓練與驗證的深度學習算法已成為新的發展趨勢[76]。
(6)障礙物跟蹤
通過對障礙物的形狀、位置、運動等狀態進行識別后,利用相同障礙物特征自相關度高于不同障礙物的特點,對相鄰幀間的相同障礙物進行關聯,最終實現對運動障礙物的跟蹤。
障礙物跟蹤的關鍵算法為數據關聯與跟蹤算法。其中,經典的數據關聯算法包括概率統計與確定性方法,根據障礙物屬性合理構造特征向量十分關鍵。跟蹤算法最常見的依然是卡爾曼濾波[77]、粒子濾波等傳統狀態估計方法。通過對比多幀數據中障礙物的位置與速度變化,確定障礙物的靜動態屬性,進而確定動態障礙物的航跡起點、運動矢量、航跡終點等。
2.1.2RGB相機
以RGB相機為代表的機器視覺,以其設備價格低、便于安裝、數據信息量豐富、且處理算法較為成熟的特點,在農機自動導航避障方面有著廣泛的研究與應用。首先,使用相機獲取彩色圖像,后對圖像進行預處理、運動目標檢測、運動目標追蹤等步驟,最終從圖像中獲得障礙物信息。
(1)圖像獲取
在農機自動導航避障方面,圖像的獲取常使用單目相機[78]、雙目相機[79]或全景相機[80-83],其獲取圖像的優缺點如表20所示。
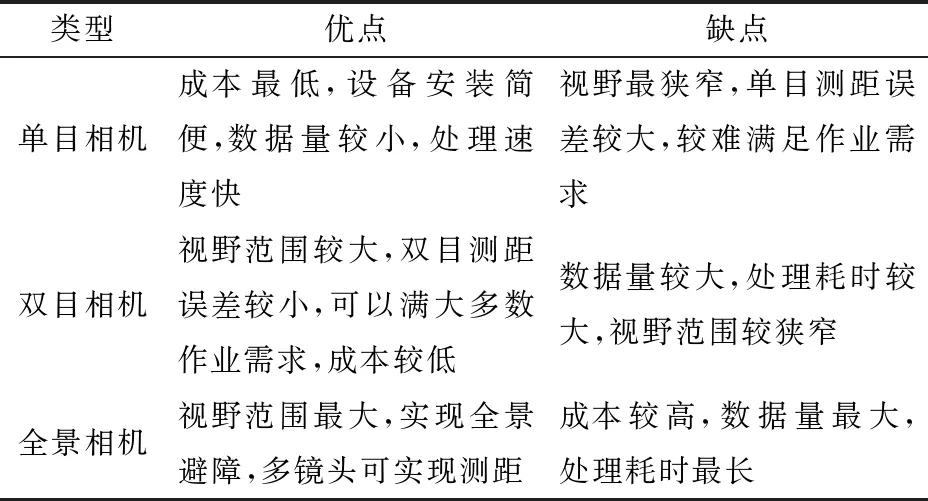
表20 3種相機設備的優缺點對比Tab.20 Advantages and disadvantages of three camera devices
目前,在農機自動導航避障方面,憑借價格低廉、測距較為準確等優點,雙目相機得到了較多的應用,技術較為成熟。而全景相機因其超廣角的視野范圍,有著良好的發展前景。
(2)圖像預處理
在實際農田作業環境下,光照、灰塵、相機抖動等都對圖像有著較大的影響,進而影響障礙物的檢測效果。可以通過使用特殊的顏色空間模型[84]、光線自適應法[85]以及圖像復原[86]等進行圖像預處理,提高成像質量。
(3)障礙目標檢測
農機在農田作業時,可能遇到多種障礙目標,如運動的人、其他農機等。目前,常用于圖像中障礙目標檢測的方法有閾值分割法、背景差分法、幀差法、光流法以及機器學習等方法。上述方法在障礙物檢測方面的主要優缺點如表21所示。
閾值分割法:通過圖像中障礙目標的顏色與背景圖像的差異,選定合適的閾值,分割出前景障礙目標。該方法計算簡單,但對于紋理、顏色復雜的圖像則效果較差。侯之旭等[87]提出一種基于彩色圖像分割的障礙物檢測方法。
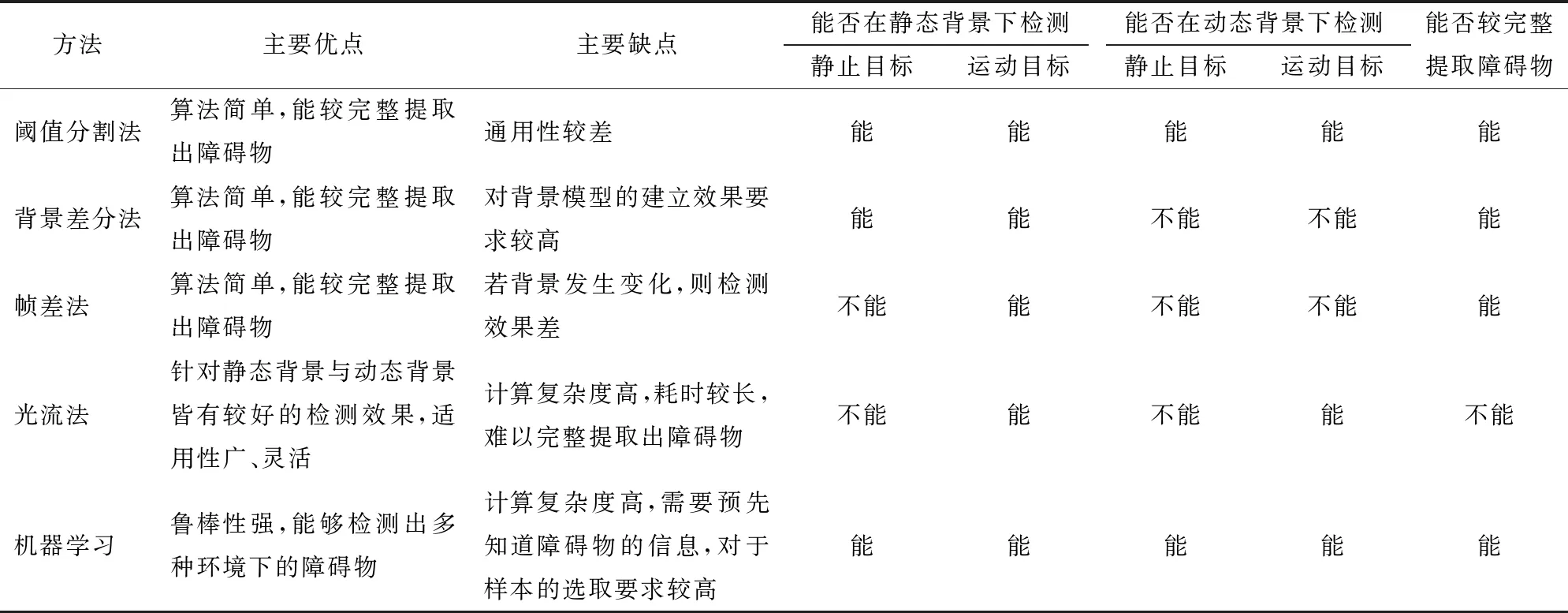
表21 主要障礙物檢測方法的優缺點對比Tab.21 Advantages and disadvantages of main obstacle detection methods
背景差分法:通過建立背景模型,從圖像中將背景減去,提取出前景目標。該方法計算簡單,但對背景建模的要求較高,且動態背景下難以檢測到運動目標。LIU等[88]提出一種基于背景差分,與Otsu、形態學運算相結合的運動目標檢測算法。
幀差法:通過連續兩幀圖像差分,從而獲得運動的前景目標。該方法操作簡單,但對于動態背景,難以檢測到運動目標,需要通過多種補償才能取得較好的效果[89-90]。
光流法:通過算法追蹤圖像中的像素點或檢測出的特征點,實現運動目標的檢測[91]。該方法適用性廣、靈活,能夠檢測多種情況下的障礙物,但計算復雜度較高,且不能完整提取出障礙目標。YANG等[92]使用Lucas-Kanade光流法在景深全景圖像中進行行人檢測。
機器學習[93-94]:通過機器學習的方法,對農田中可能會出現的障礙物進行檢測。機器學習方法具有無需考慮模型、識別分類準確率高等優點,但同時也有分類器學習網絡設計復雜、訓練時間長等缺點。
(4)障礙目標跟蹤
在檢測并確定障礙目標后,可以通過核函數[95]、Camshift[96]等算法實現對障礙目標的跟蹤。
綜上,激光雷達與機器視覺在農機自動導航避障方面的研究與應用,受到國內外學者的廣泛關注,取得了很好的效果。但仍存在數據易受環境干擾、數據量大、實時性差等問題,針對檢測算法的魯棒性還需要進一步提高。
2.2 多機協同作業
隨著中國農業集約化、規模化、產業化的發展,以及導航作業需求的提高,多機協同導航成為農機導航研究的熱點。多機協同導航系統由一個主機、多個從機和一個遠程服務器端構成,系統示意圖如圖2所示。主機在前方引導作業,各從機通過車間通信和遠程通信,實時接收來自主機或遠程服務器任務指令,配合主機協同導航完成總體作業任務。
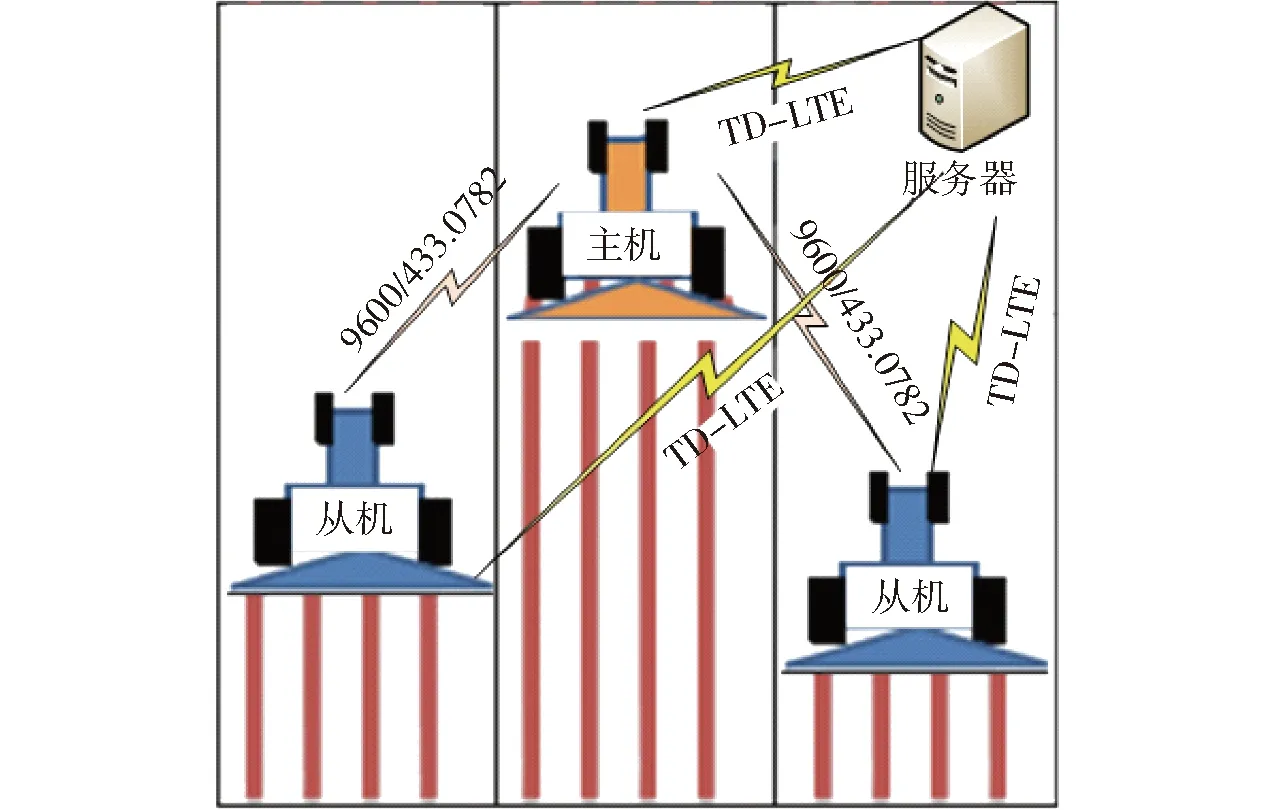
圖2 多機協同導航系統示意圖Fig.2 Schematic of multi machine cooperative navigation system
目前,國內的研究工作主要集中于單一農機自動導航作業,關于多機協同導航技術的研究相對較少。國外在多機協同導航領域研究起步較早,取得了一定研究成果[97-98]。多機協同導航的關鍵技術涉及協同導航模式、通信技術、協同控制技術以及遠程監控平臺等。
2.2.1協同導航模式
多機協同作業模式主要分為跟隨型協同作業模式和命令型協同作業模式[99-100]。
跟隨型協同作業,即以多機中的一臺為主機,其他農機為從機。從機以預定的相對距離和角度跟隨主機作業。例如,多臺同種旋耕機可以進行跟隨型協同作業,以其中一臺作為主機,其余旋耕機作為從機,以不同相對位置跟隨主機協同完成旋耕任務。
命令型協同作業,即遠程監控平臺發布總體任務,命令各農機去特定區域執行作業任務。主機根據作業任務,基于此目標作業區域信息和當前位置、航向進行全局路徑規劃,并考慮自身需求向從機發布子任務。各從機接收到子任務,通過任務完成代價對比,由代價相對較低的從機完成相應子任務。例如,打捆機利用自身導航系統確定草捆的位置,并通過無線通信網絡發送給各草捆運送機,各草捆運送機根據自身及草捆的位置信息進行路徑規劃,路徑最優者獲得該任務,并通過自身導航系統完成草捆運送,實現命令型協同作業。
2.2.2通信技術
協同導航的通信任務,涉及底層通信、車間通信和遠程通信3部分。
(1)底層通信
底層通信是導航系統內部各傳感器與控制終端的通信。在底層通信技術方面,由于各控制系統均有獨立的ECU作為控制單元,隨著電控技術應用領域的不斷拓寬,傳統點對點的通信方式已很難適應現代農機智能導航對于多節點控制系統的需求。
目前底層通信的主流實現方案為控制器局域網總線(Controller area network, CAN)。CAN總線可以實現眾多電子單元之間的數據交換和共享,且線路簡單、實時性好、抗干擾能力強、可靠性高,適用于復雜農田環境下的農機智能導航數據通信。劉陽[101]為拖拉機自動導航系統開發了CAN總線網絡,主要包括轉向控制、播種和智能控制終端3個節點。
(2)車間通信
要實現多機協同導航,多機之間的通信技術方案選取十分關鍵。短距離無線通信技術包括Bluetooth、IrDA、ZigBee、超寬帶、數傳電臺等技術,在傳輸速度、距離、耗電量、功能擴充以及單機應用方面各有優劣[102-103]。多機協同作業,各農機之間需要進行狀態信息交互,LI等[104]設計了車間通信協議幀格式,進行狀態信息傳輸。
(3)遠程通信
遠程通信指作業農機與遠程監控平臺間的通信,主要用于控制命令的下發和農機狀態信息的上傳。目前,廣泛應用的遠距離無線通信技術為GPRS、4G和5G,目前4G應用較為廣泛,未來5G將成為主流技術。李世超等[105]設計了遠程通信協議,通過4G網絡和無線通信模塊實現了各農機信息與服務器之間雙向通信。
2.2.3協同控制
多機協同導航控制方法旨在協調控制多機協作過程中相互之間的位置關系,或根據任務需求協調從機配合主機共同完成作業。白曉平等[106]針對領航-跟隨結構,結合反饋線性化及滑模控制理論設計了收獲機群路徑跟蹤控制律和隊形保持控制律。李翰博[107]針對動態競爭環境中的多自主車輛系統的協作控制與分布式優化問題,研究了車輛編隊中的跟隨和隊形控制、道路交叉口區域多車協作以及自主車輛任務規劃等協同控制方法。
綜上,要實現高精度的田間協同導航作業,需要高性能的通信網絡和協同控制方法。未來可以考慮5G在多機協同導航技術中的應用,此外還需加強多機地頭轉向時為避免沖突的協同控制方法研究。
2.2.4遠程監控平臺
多機協同作業遠程監控平臺是多機協同導航系統的重要組成部分,可以實現對區域內多機協同作業的實時遠程監控,并對作業農機實現作業管理和調度管理[1,66,100]。
多機協同作業遠程監控平臺主要涉及農機與平臺之間的遠程通信、多機協同作業信息管理和多機協同調度管理[108]。遠程監控平臺利用無線網絡與車載終端進行遠程通信[105],實現對多機協同作業的作業管理和調度管理。其中,作業管理主要涉及多機協同導航作業信息遠程監測、作業進度實時分析以及作業質量在線評估等;調度管理主要是為了實現區域農田內的多機協同作業任務分配和路徑規劃。
目前,國內外很多大型農業機械均已安裝遠程監控終端[109-110],但大多針對農機作業的遠程監測和作業信息管理,對于區域內多個農機協同作業的調度管理,國內外的研究和應用相對較少。
多機協同作業遠程管理調度[111]需要在多臺農機和多個作業地塊間建立一種映射關系,綜合考慮地塊位置、任務數量、作業能力、路徑代價和時間期限等因素,在滿足實際作業約束條件的前提下,以最小化調度成本和損失為目標,生成最優的調度方案,使農機有序地為農田作業地塊服務,從而實現區域內多機協同作業的調度管理。
(1)多機協同作業任務分配
多機協同作業任務分配的關鍵是在具有多個農機、多個任務的農田作業環境中,將多個任務合理地分配給各個農機,并且各個農機根據分配的任務尋找一條最優的作業序列,從而建立一個路徑短、效率高、資源配置合理的調度模型。
目前,解決任務分配問題的方法[112-113]主要包括線性規劃法[114]、市場機制法[115-116]、行為激勵法[117]、情感招募法[118-119]、空閑鏈法[120]以及基于群體智能的方法[121-122]等,幾種算法的優缺點如表22所示。

表22 任務分配方法性能對比Tab.22 Comparison of task allocation methods
(2)多機協同作業路徑規劃
在多機協同作業過程中,農田作業環境中障礙物較多,農機之間也存在相互影響,成為彼此的障礙物,因此,多機協同作業路徑規劃難度較大,單一的路徑規劃算法無法得到很好的規劃效果。
有研究將多種路徑規劃方法進行改進和整合[123-124],取長補短,從而實現最優路徑規劃。要想解決復雜農田作業環境下的多機協同作業路徑規劃,需要在全局路徑規劃的前提下,進行局部路徑的調整,不發生沖突時要保證全局規劃最優,沖突發生時進行局部規劃,沖突解決以后繼續以全局最優進行再規劃[125-126]。
多機協同作業任務分配和路徑規劃是多機協同導航系統研究的關鍵問題,高效合理的任務分配和路徑規劃可以提高整個系統的執行效率,同時降低執行代價。當前國內外的研究工作已經取得了一些成果[127],研究方法也在不斷的創新,但是還有一些問題亟待解決。由于農田作業環境具有復雜性和動態性,多機協同作業對任務分配和路徑規劃方法提出了更高的要求,主要集中在以下幾方面:任務分配和路徑規劃的動態性和實時性問題;復雜任務的分解問題;農機-任務的供需匹配問題;實驗室研究成果的推廣應用問題等。
3 無人農場與智慧農業
隨著人工智能、大數據、物聯網等前沿技術的發展,農業生產方式從機械化向自動化、智能化迅速邁進。信息與通信技術也促進了精細農業技術體系的更新換代,新時代的精細農業技術體系被稱為精細農業2.0,也被稱為“智慧農業”(Smart agriculture)。農業機器人不僅越發多元化、智能化,還推動了“無人農場”等新興概念的出現。
智慧農業示意圖如圖3所示,遠程管理系統實現任務規劃和作業路徑規劃并發布,智能農機裝備完成耕地、播種、施肥、噴藥和收獲等作業,全程實現無人管理。
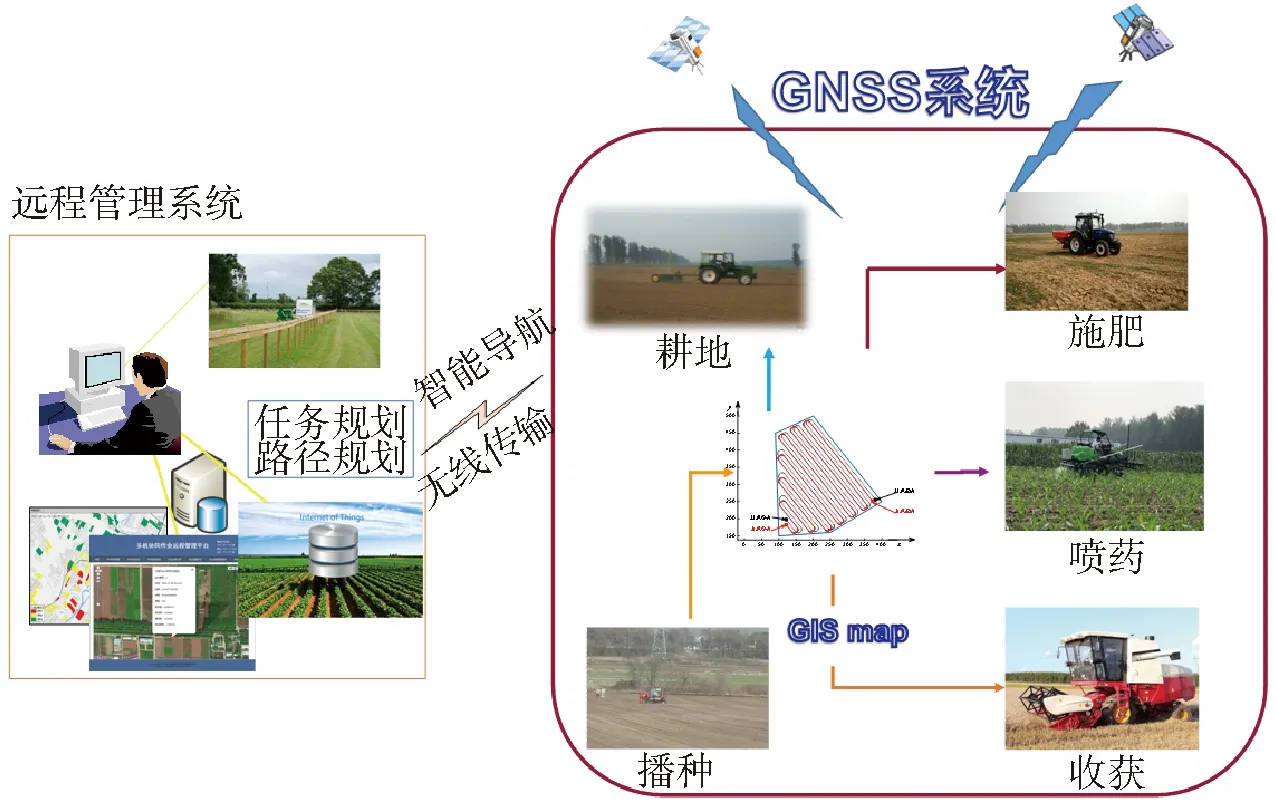
圖3 智慧農業示意圖Fig.3 Smart agriculture
全球首個“無人農場”誕生在英國,哈珀亞當斯大學(Harper Adams University)與精準決策公司(Precision Decisions)合作,推出了“Hands Free Hectare”項目,實現了全球第一批全程沒有人工介入的大麥種植管理。在1 hm2的實驗田內,實現了全過程自動化,整個種植過程不允許任何人進入農田,采用無人機進行作物長勢檢測,自動導航農機進行土壤采樣、噴藥等管理,自動導航聯合收獲機進行收獲,整個過程只需要參與者在操作間完成。實驗田的產量雖僅為4.5 t/hm2,低于人力密集型種植方式(平均產量為6.8 t/hm2),但為未來農業的發展指明了方向。
日本在政府的支持下,開展了智慧農業的研究與示范,在智慧農場示范區推廣應用日本研發的智慧農業先進技術。主要技術包括:遠程操控無人駕駛農業機械,無人機感知和人工智能相結合的精準施肥施藥技術,適應無人智能農機的土地整治,智能手機在種植和養殖中的應用,農業大數據的共享與應用等。
我國從農業發展實際出發,大力研究、推廣、應用智慧農業技術,我國北斗導航衛星系統的建設,助推了智慧農業,農機智能導航技術的研發與應用成為我國發展智慧農業的亮點。在黑龍江農墾區和新疆生產建設兵團,由于作業面積、作物、作業要求的特點,農機自動導航裝備得到了廣泛應用,特別是在新疆棉花產區,棉花穴播播種的同時需要測深施肥,播種施肥的同時又需要鋪膜,鋪膜的同時還需要鋪設滴灌管,這些農藝特點使得農機自動導航裝備成為不可缺少的配置。
4 結論與展望
(1)為實現復雜農田環境下農業機械的自動導航,國內外學者進行了廣泛而深入的研究,取得了豐碩的成果。GNSS、INS、MV融合的定位測姿、全局與局部結合的路徑規劃和精確的運動控制是實現農機自動導航的關鍵技術。
(2)隨著農機自動導航技術的推廣,智能農機及其導航技術成為智慧農業的發展趨勢。自主避障技術可保證人機作業安全,多機協同作業技術可發揮機群作業優勢,提高農機作業效率,以上研究已逐漸成為新的研究熱點。
(3)信息與通信技術促進了智慧農業的發展。我國北斗導航衛星系統的建設,進一步助推了智慧農業,農機智能導航技術的研發與應用已成為我國發展智慧農業的亮點。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
公民與法治(2020年11期)2020-07-25 02:02:06
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28