模塊化大蒜聯合收獲機設計與試驗
2020-04-27 08:41:32蔡冬梅秦理想黃偉濤
農業機械學報 2020年4期
趙 東 蔡冬梅 秦理想 高 祥 黃偉濤 劉 承
(濟南大學機械工程學院, 濟南 250022)
0 引言
我國是世界第一大蒜生產國[1]。據全球大蒜網統計,2016年大蒜種植面積約53.3萬hm2。山東省、江蘇省、河南省、安徽省、新疆維吾爾自治區等成為我國大蒜主產區。其中,山東省大蒜種植面積超過20萬hm2,約占全國產量和出口量的一半以上。
我國大蒜種植面積雖大,但收獲機械化水平較低,大多采用扁鏟人工挖掘[2]。目前,市場上應用較多的收獲裝備多為兩段式收獲機械[3-7]。兩段式收獲機械只完成了大蒜的挖掘、清土和鋪放,后期仍需要人工撿拾和切秧,勞動強度依舊較大,效率仍需進一步提高。為提高大蒜機械化收獲的效率和品質,國內外專家、學者進行了大量研究,國外農機企業也先后研制出相關產品。比較成熟的有西班牙J.J. BROCH公司的ARCO-4型聯合收獲機[8]、法國ERME公司的RES、REP、RECL等多行收獲機[9-10],以及日本YANMAR公司大蒜收獲機[9,11]。國外大蒜收獲機雖然總體先進,但最小收獲行距都偏大(BROCH為420 mm,ERME為450 mm,YANMAR大于220 mm),無法適應中國行距180~220 mm[12]種植模式下的大蒜收獲。國內研制的大蒜聯合收獲機主要是山東華源萊動內燃機有限公司的4DS-6型大蒜聯合收獲機[13]、農業農村部南京農業機械化研究所的4DLB-2型大蒜聯合收獲機[14-16]、山東省農業機械科學研究院的4DS-900型大蒜收獲機[17]和青島農業大學的大蒜打捆收獲機[18]等。國內現有大蒜聯合收獲機存在的典型問題是適用性差[17,19]、調整困難,不能對不同種植模式、不同行距種植模式下的大蒜進行機械化收獲。為解決這個問題,本文設計一種模塊化大蒜聯合收獲機,并對其性能進行研究。
1 整機結構與工作原理
1.1 整機結構
模塊化大蒜聯合收獲機[20]結構如圖1所示,主要由模塊化的大蒜收獲單元單體(圖2)和底盤組成。底盤上設置通用安裝接口,可根據需要加掛大蒜收獲單元從而構造1~n行大蒜聯合收獲機(圖1是n=4時的4行大蒜收獲機)。
大蒜收獲單元(圖2)由仿形扶禾單元、破土單元、起送蒜單元、齊蒜斷秧單元和順向輸送單元組成。收獲單元主要參數為:最大寬度120 mm,可實現行距最小70 mm的多行大蒜收獲;箭鏟工作深度0~200 mm;大蒜留秧高度0~100 mm;輸送單元輸送高度60~1 200 mm;收獲單元外形尺寸(長×高×寬)為2 360 mm×1 600 mm×120 mm。

圖1 4行大蒜收獲機結構示意圖Fig.1 4-rowed garlic combine harvester1.收獲單元 2.底盤

圖2 模塊化收獲單元單體Fig.2 Modularized garlic harvest unit1.仿形扶禾單元 2.破土單元 3.起送蒜單元 4.齊蒜斷秧單元 5.順向輸送單元
1.2 工作原理
大蒜聯合收獲機工作時,仿形扶禾單元中的斷草仿形輪在軋斷雜草(防止其纏繞仿形輪和同步帶輪影響正常工作)的同時沿地面仿形行走。扶禾器將倒伏和分散的大蒜莖葉扶起、聚攏,通過導蒜桿把蒜秧引導至起送蒜單元同步帶入口。起送蒜單元同步帶夾持蒜秧并向上、向后輸送。同時,預調整到固定深度的箭鏟在被夾持蒜的前下方進行破土。破土后的大蒜被同步帶向上拉拔實現大蒜出土收獲。出土后大蒜向后輸送時依靠階梯碎土板實現土壤清除。大蒜進入齊蒜斷秧單元后,在齊蒜桿拉拔下,蒜頭向下移動、對齊,高速旋轉圓盤刀將蒜秧切斷。斷秧后的蒜頭掉落在順向輸送單元的輸送鏈上向后輸送進入果箱或果袋。剩余蒜秧被同步帶夾持繼續向后輸送,最后拋落在地面上。在蒜頭向果箱輸送過程中,通過順向輸送單元上的振動裝置實現二次清土。如圖1所示,收獲單元通過安裝孔與底盤上的安裝桿連接實現多行大蒜聯合收獲機的裝配。收獲單元可在安裝桿上0~300 mm或更大范圍內無級調整位置,實現70~420 mm不同行距大蒜收獲作業。除此之外,將收獲單元在安裝桿上不等間距設置,可實現平播、套種等不同種植模式下大蒜的機械化收獲,提高了大蒜聯合收獲機的適應性。
2 關鍵功能部件設計
模塊化大蒜聯合收獲機的主要功能部件包括起送蒜單元和破土單元。這兩個功能部件設計質量直接影響整機功能的實現,是整個大蒜聯合收獲機設計的重點。
2.1 起送蒜單元
2.1.1起送蒜單元結構
起送蒜單元(圖3)是大蒜聯合收獲機核心單元,其功能是實現破土后大蒜的拉拔收獲和輸送。其中,拉拔收獲是起送蒜單元的重要功能。大蒜拉拔收獲主要依靠兩根相互接觸且方向相同、速度相等的同步帶夾持蒜秧并向上運動來實現。因此,同步帶與蒜秧間接觸力(夾持力)計算及影響因素研究是大蒜拉拔收獲的重要保證。

圖3 起送蒜單元結構簡圖Fig.3 Garlic drawing and transporting unit1.斷草仿形輪 2.扶禾器 3.導蒜桿 4.同步帶 5.同步帶輪 6.驅動液壓馬達
2.1.2拉拔力理論計算模型
同步帶夾持大蒜向后輸送過程中,產生垂直向上的拉拔運動,如圖4所示。由于大蒜種植淺,拉拔出土時間短,出土過程中水平運動位移較小。為方便計算,大蒜在拉拔出土過程中,只考慮垂直方向的運動。因此,破土后大蒜拉拔收獲過程受力分析如圖4所示。其中,Fl是大蒜拉拔力;Fz是綜合阻力,包括大蒜自重和出土阻力。其中,大蒜出土阻力由文獻[21]確定。

圖4 大蒜收獲過程受力分析Fig.4 Force analysis of garlic harvest1.大蒜 2.箭鏟 3.地面 4.同步帶
大蒜拉拔力主要由同步帶擠壓大蒜假莖產生。為方便計算,將大蒜假莖簡化為一個均質彈性體,受同步帶擠壓而產生的變形如圖5所示。

圖5 大蒜假莖變形受力分析Fig.5 Force analyses of garlic stem deformation
同步帶與假莖之間的正壓力N為
(1)
其中
S1=αr2
式中N——作用在蒜莖上的壓力,N
K——蒜秧體積模量,為(1.5~1.9)×107Pa
V1、V2——蒜秧擠壓前包角α、擠壓后包角β所對應圓形蒜莖的體積,m3
S1、S2——蒜秧擠壓前包角α、擠壓后包角β所對應圓形蒜莖的扇形面積,m2
w——同步帶寬度,m
r——進入起送蒜單元前的蒜秧半徑,m
lc——蒜秧變形后截面橢圓的長半軸長度,取值范圍為0.008~0.015 m
lb——蒜秧變形后截面橢圓的短半軸長度,取值范圍為0.004~0.01 m
E——蒜秧彈性模量,取值范圍(0.8~1)×107Pa
μ——蒜秧泊松比,0.3~0.5
Fl=Nf
(2)
式中f——大蒜假莖與同步帶間摩擦因數
根據本文實測,f取值在0.51~0.54之間。
2.1.3影響因素分析
由式(1)、(2)可以看出,影響大蒜拉拔力的因素主要有大蒜假莖被擠壓后與同步帶接觸區域包角β、同步帶寬度w和大蒜假莖半徑r。其中,可通過收獲機參數調整進行控制的參數有β和w。包角β可通過調整同步帶張緊力實現改變;同步帶寬度w可通過更換同步帶實現調整。因此,這兩個參數對拉拔力影響研究更具有實際價值。
拉拔力隨包角和同步帶寬度改變而變化的趨勢如圖6所示。

圖6 同步帶寬度與包角對拉拔力的影響Fig.6 Effect of synchronous belt width and angle of contact on garlic drawing force
從圖6可以看出:
(1)拉拔力隨包角和同步帶寬度增大呈現近似直線的上升趨勢。包角增大30°,拉拔力平均增大53 N。同步帶寬度增大0.03 m,拉拔力平均增大76 N。同步帶寬度增加比包角增大對提升拉拔力的影響大。
(2)包角在120°左右時,拉拔力超過55 N,已滿足松土后大蒜拉拔需要。
(3)同步帶寬度超過0.035 m后,大蒜拉拔力超過100 N,也滿足松土后大蒜拉拔需要。
(4)綜合考慮包角和同步帶寬度的綜合影響,大蒜聯合收獲機選取寬度為0.038 m的同步帶,從而保證在包角變化的情況下亦能提供充足的拉拔力,保證大蒜聯合收獲機工作性能。
2.2 破土單元
2.2.1破土單元結構
破土單元(圖7)主要功能是實現破土和大蒜挖掘,是大蒜收獲機主要耗能部件。因此,破土力(行駛阻力)是收獲機功率選擇的主要依據。破土單元主要包括箭鏟、鏟柄、箭鏟安裝座、深度調整器和安裝架。其中,箭鏟是破土單元主要工作部件。

圖7 破土單元結構簡圖Fig.7 Soil ripping unit1.箭鏟 2.鏟柄 3.箭鏟安裝座 4.深度調整器 5.安裝架
2.2.2破土力理論計算模型
箭鏟勻速運動時與土壤耦合作用下的受力如圖8所示。

圖8 土垡受力分析Fig.8 Force analysis of soil block on arrow shaped ripper
由圖8可知,水平、垂直方向受力平衡方程為
N0(sinαR+ftjcosαR)-N1(sinβH+fttcosβH)+
CaSccosαR-(CaSj+Fa)cosβH=0
(3)
G-N0(cosαR-ftjsinαR)-N1(cosβH-fttsinβH)+
CaScsinαR+(CaSj+Fa)sinβH=0
(4)
式中N0——土垡-箭鏟間正壓力,N
αR——箭鏟入土角,(°)
ftj——土垡-箭鏟間摩擦因數
N1——切割土垡之間擠壓載荷,N
βH——土垡滑移角,(°)
ftt——土垡間內摩擦因數
Ca——土壤單位粘聚力,Pa
Sc——箭鏟面積,m2
Sj——土垡滑移面面積,m2
Fa——土垡加速載荷,N
G——土垡重力,N
根據箭鏟受力平衡方程可知
W=N0sinαR+N0ftjcosα+CaSccosαR
(5)
式中W——箭鏟破土力,N
聯立式(3)~(5)得

(6)
其中
式中γ——土壤容積密度,kg/m3
L——土壤沿箭鏟尾部伸出的距離,m
L0——箭鏟頂端至箭鏟尾部土壤的距離,m
h1——土壤厚度,m
h——箭鏟入土深度,m
b——箭鏟寬度,m
v0——整機前進速度,m/s
v——土垡滑移速度,m/s
m——土垡質量,kg
從式(6)可以看出,確定11個初始參數γ、αR、βH、ftj、ftt、b、h、L0、v0、Sc、Ca的值,即可求得無土壤純切削阻力時箭鏟破土力W。
2.2.3影響因素分析
雖然影響破土力的因素較多,分析可以發現,γ、βH、ftj、ftt、Ca等5個參數屬于環境因素參數,使用中難以人工調整和控制;b、L0、Sc等3個參數雖然也屬于結構參數,影響破土力計算,但結構設計完成后該參數不再變化。因此,前述8個參數只進行合理選擇,不再進行重點分析。本節重點分析箭鏟入土角αR、整機前進速度v0和箭鏟入土深度(挖掘深度)h變化對箭鏟破土力的影響。
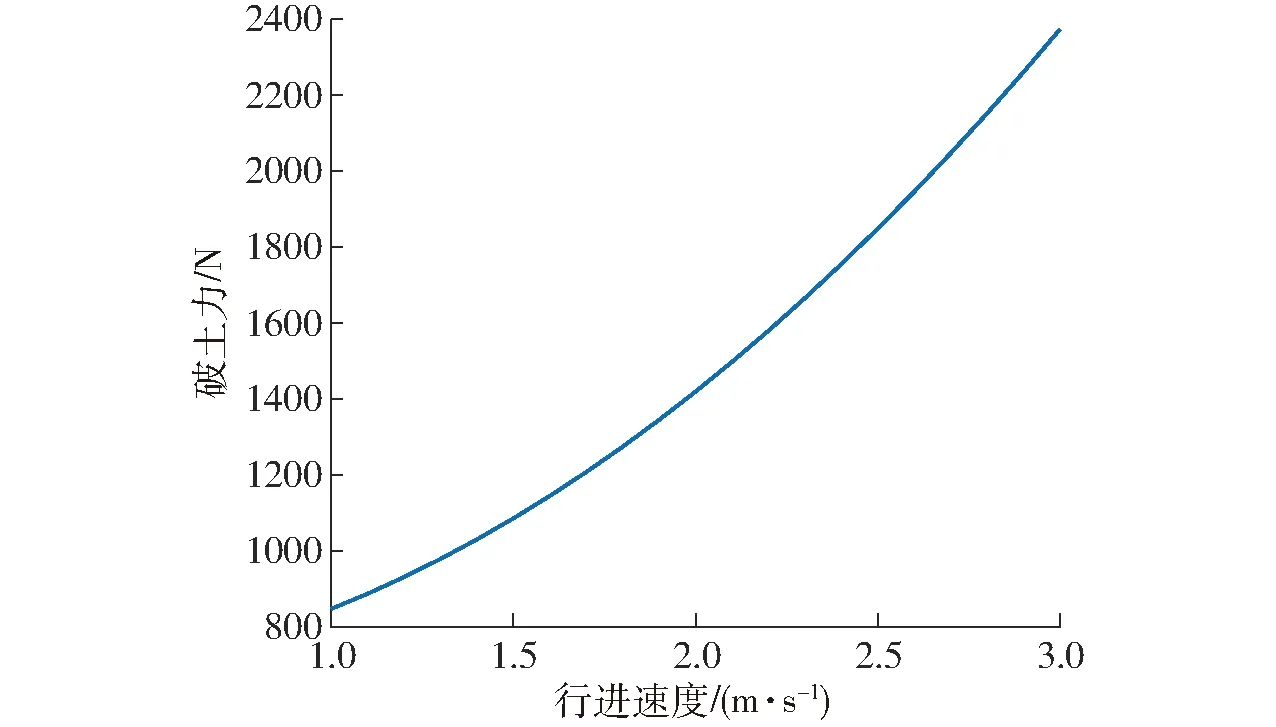
圖9 箭鏟行進速度對破土力的影響Fig.9 Effect of velocity on resistance of arrow shaped share
由式(6)可知,破土力隨大蒜聯合收獲機行進速度而變化的規律如圖9所示。從圖中可以看出,隨著收獲機械行進速度的增加,箭鏟破土力增加;在2.2 m/s正常收獲速度下,箭鏟破土力在1 500 N左右。
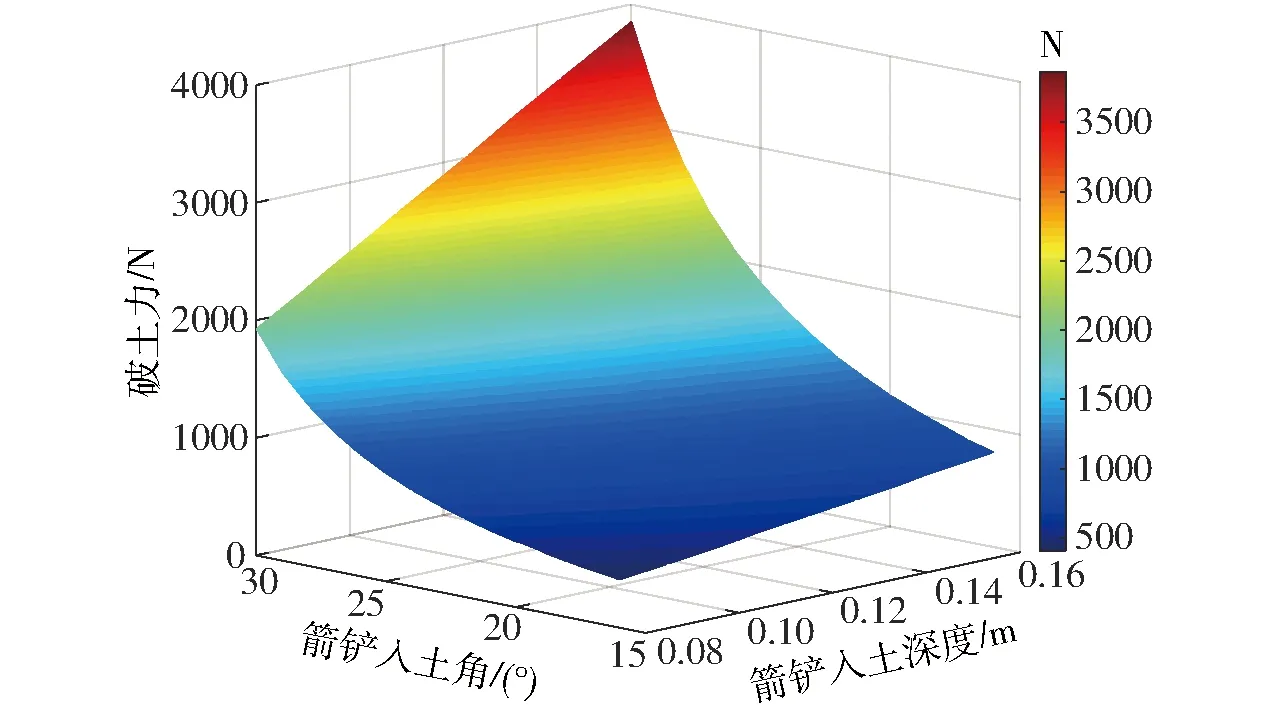
圖10 箭鏟入土深度與箭鏟入土角對破土力的影響Fig.10 Effect of buried angle and depth on resistance of arrow shaped shovel
由式(6)可知,破土力隨箭鏟入土角、入土深度改變而變化的規律如圖10所示。從圖中可以看出,隨著箭鏟入土深度的增加,箭鏟破土力呈現直線增加趨勢。入土深度增加0.08 m,破土力平均增大927 N;在0.1 m左右正常工作入土深度下,箭鏟破土力在1 000 N左右;隨著箭鏟入土角增加,箭鏟破土力呈現指數增加趨勢;箭鏟入土角在20°左右的正常工作角度下,破土力在1 000 N左右。超過25°后,箭鏟破土力增加迅速。因此,實際工作過程中,箭鏟入土角應根據實際破土深度控制在25°以下,最佳區間為[15°, 25°]。
3 整機性能試驗
3.1 拉拔力試驗
3.1.1試驗方案
拉拔力測試在樣機上進行。在同步帶張緊裝置上串聯推拉力計(圖11)進行張緊力調整,實現大蒜假莖包角改變。為保證試驗的可重復性,采用摩擦因數相近的橡膠管替代大蒜假莖進行試驗,以避免由于重復試驗造成大蒜假莖破壞,影響摩擦力測試的準確性。
(1)試驗設備連接
首先將推拉力計安放在張緊螺栓與同步帶張緊裝置之間;然后將推拉力計與計算機串口連接進行數據采集。

圖11 拉拔力測試試驗Fig.11 Drawing force experiment1.起送蒜單元 2.同步帶張緊裝置 3.推拉力計 4.同步帶
(2)測試位置選擇
根據起送蒜單元實際拉拔起蒜位置(圖11中星標位置)夾持橡膠管進行拉拔力測試。
(3)拉拔力測試
通過調整張緊螺栓,逐步調整同步帶的張緊力。同步帶張緊力每增大100 N,進行一組拉拔力測試。同步帶張緊力由300 N增加到2 900 N,記錄拉拔力數值。
3.1.2試驗結果與分析
隨同步帶張緊力改變實測拉拔力變化曲線如圖12所示。

圖12 拉拔力隨張緊力變化曲線Fig.12 Changing curve of drawing force with tensile force
從圖12中可以看出,隨著同步帶張緊力的增大,大蒜拉拔力增加;當同步帶張緊力為2 800 N時,同步帶所提供的拉拔力為55.7 N,大于松土后大蒜所需拉拔力。因此可以確定:當同步帶張緊力大于2 800 N時起送蒜單元滿足正常工作要求。
3.2 破土力試驗
3.2.1試驗方案
破土力測試主要分析箭鏟入土深度、入土角、整機前進速度等對破土力的影響。在結構設計時,箭鏟調整裝置在調整箭鏟入土角的同時調整入土深度。由于兩個因素聯動,因此試驗時用入土深度一個因素替代。同時,為提高收獲機實際工作過程中破土性能,把土壤濕度、土壤硬度兩個因素也納入影響因素進行綜合測試和分析。試驗采用正交試驗方法安排,選取的因素和水平如表1所示。考慮各因素之間的交互作用,采用L27(313)正交表安排試驗,如表2所示,A、B、C、D為因素水平值。試驗裝置如圖13所示。

表1 試驗因素與水平Tab.1 Experiment factors and levels
3.2.2測試結果及分析
分析表2可知,C、AB、AC、BC、BD、CD影響較小,合并作為誤差進行方差分析,結果如表3所示。
從表3中可以得出,對比F臨界值(F0.05(2,22)=5.72,F0.05(4,22)=2.82)可知,對箭鏟破土力有顯著影響的因素是箭鏟入土深度、土壤濕度;入土深度是影響箭鏟破土力的最顯著因素;其次是土壤濕度;再次是土壤濕度-土壤硬度交互作用;最后是土壤硬度;整機前進速度對箭鏟破土力的影響最小。最佳水平組合是A3B1C1D2。從表2中可以看出,20號試驗是最佳組合參數試驗,破土力較小。
3.3 田間整機性能試驗
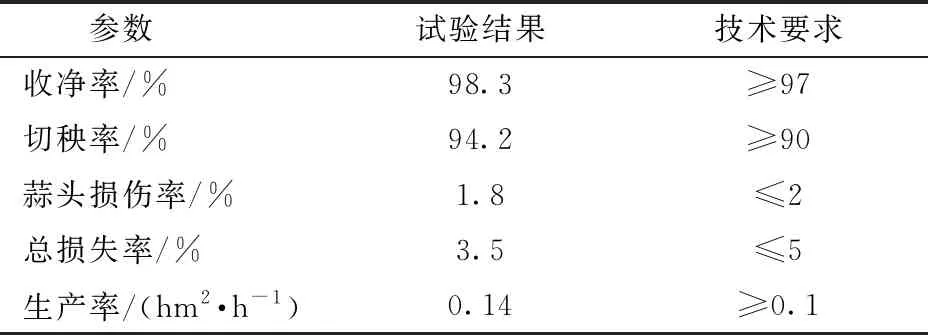
為檢驗模塊化大蒜聯合收獲機性能及指標參數,2018年5月在山東省臨沂市某公司自有試驗田(為進行樣機性能測試,公司試驗田大蒜種植行距在80~300 mm之間每隔20 mm加以取值)進行樣機性能檢測。記錄每次試驗擬收獲大蒜總株數、大蒜收獲數、損失數以及蒜頭損傷數。試驗過程如圖14所示,試驗結果如表4所示。其中,收凈率是指大蒜收獲機所行走的試驗田內被拔取的大蒜株數與大蒜總株數的比值;漏拔率指的是試驗范圍內未被拔取的大蒜總數與大蒜總株數的比值;總損失率指的是蒜頭損傷率與漏拔率之和。
通過整機的田間試驗發現,大蒜聯合收獲機能夠實現大蒜收獲的各項功能,各項指標均滿足設計要求。
4 結論
(1)大蒜收獲單元采用模塊化設計。將扶禾單元、起送蒜單元、破土單元、齊蒜斷秧單元等大蒜收獲必需功能集中設置,形成獨立收獲單元模塊。收獲單元可根據需要加掛,配合不同輸送單元,可組裝行大蒜聯合收獲機。同時,各個收獲單元間距可在0~300 mm之間自由調整,實現行距70~420 mm之間大蒜的機械化收獲。除此之外,用戶還可以根據種植行數、行距自由加掛收獲單元數量,并進行行距適應性調整,實現間作套種地塊大蒜的機械化收獲。

表2 破土力試驗方案與結果Tab.2 Orthogonal array and results of arrow shaped shovel resistance

圖13 破土力試驗Fig.13 Experiment of arrow shaped shovel resistance1.破土單元 2.試驗土槽 3.推拉力計 4.動力架
表3 方差分析
Tab.3 Analysis results of variance

來源平方和自由度均方和FA2.7521.379.79B7.9223.9628.30D0.4720.241.69AD2.0540.513.67誤差2.97220.14

圖14 收獲機現場測試Fig.14 Test of garlic combine harvester in field
表4 大蒜聯合收獲機田間試驗結果
Tab.4 Results of garlic combine harvester test in field
參數試驗結果技術要求收凈率/%98.3≥97切秧率/%94.2≥90蒜頭損傷率/%1.8≤2總損失率/%3.5≤5生產率/(hm2·h-1)0.14≥0.1
(2)建立了大蒜拉拔力理論分析模型。在對影響因素進行研究的基礎上,得到了各結構參數對拉拔力的影響規律。試驗證明,拉拔力隨大蒜假莖包角增大而增加;當同步帶張緊力超過2 800 N時,同步帶所提供的拉拔力大于松土后大蒜所需拉拔力,可實現大蒜拉拔收獲。
(3)建立了破土力理論分析模型,得到了箭鏟入土角、箭鏟入土深度、整機前進速度等參數對破土力的影響規律。利用正交試驗得到了各個參數對破土力的影響顯著程度:土壤濕度與箭鏟入土深度兩因素對箭鏟破土力的影響非常顯著,其中,箭鏟入土深度影響最顯著,土壤濕度影響次之。
(4)樣機田間試驗結果表明,大蒜收凈率98.3%、切秧率94.2%、蒜頭損傷率1.8%、總損失率(包括損失和損傷的大蒜)3.5%、生產率0.14 hm2/h。大蒜聯合收獲機的各項技術指標均滿足設計技術要求。
猜你喜歡
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
媽媽寶寶(2017年3期)2017-02-21 01:22:28
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(2016年3期)2016-03-26 07:13:38