SYJ-3深施型斜置式液肥穴施肥機(jī)設(shè)計(jì)與試驗(yàn)
2020-04-27 08:41:30周文琪劉子銘王金武黃會(huì)男王傲雪
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2020年4期
周文琪 肖 紅 劉子銘 王金武 黃會(huì)男 王傲雪
(1.東北農(nóng)業(yè)大學(xué)工程學(xué)院, 哈爾濱 150030; 2.黑龍江省農(nóng)業(yè)機(jī)械工程科學(xué)研究院, 哈爾濱 150081;3.東北農(nóng)業(yè)大學(xué)園藝園林學(xué)院, 哈爾濱 150030)
0 引言
液肥穴深施技術(shù)可提高作物產(chǎn)量,減少液肥蒸發(fā)對(duì)大氣造成的污染,提高液態(tài)肥料的利用率[1-3]。國(guó)外的液肥穴施肥機(jī)主要采用“桿機(jī)構(gòu)”運(yùn)動(dòng)形式,實(shí)現(xiàn)針體入土和出土行為,達(dá)到液肥穴深施目的,但施肥效率較低[4]。國(guó)內(nèi)設(shè)計(jì)的深施型液肥穴施肥機(jī)主要采用“非規(guī)則齒輪傳動(dòng)機(jī)構(gòu)”運(yùn)動(dòng)形式,通過(guò)噴肥針將液肥注入到土壤一定深度中,施肥效率較高[5-7]。
國(guó)外RAHMAN等[8]設(shè)計(jì)了一種圓盤探針式穴施肥機(jī),機(jī)具在施肥圓盤上徑向均勻布置若干個(gè)探針,在拖拉機(jī)的牽引下,施肥圓盤滾動(dòng)并將每個(gè)針體依次扎入與拔出土壤,實(shí)現(xiàn)液肥穴深施功能。該機(jī)具雖然效率較高,但探針固定的余擺線軌跡無(wú)法實(shí)現(xiàn)穴口較小的目標(biāo)。WOMAC等[9]設(shè)計(jì)一種曲柄滑塊式深施型液肥穴施肥機(jī),通過(guò)曲柄的周期性轉(zhuǎn)動(dòng),由滑塊帶動(dòng)注射針完成入土噴肥、出土停噴的穴施功能。DA SILVA等[10]采用凸輪-曲柄搖桿組合機(jī)構(gòu)作為穴施機(jī)具的驅(qū)動(dòng)部件,對(duì)甘蔗作物實(shí)現(xiàn)定點(diǎn)穴施肥功能。這兩種機(jī)具雖然可實(shí)現(xiàn)注射針在入、出土過(guò)程中始終保證垂直姿態(tài),穴口較小目標(biāo),但扎穴部件均通過(guò)“桿機(jī)構(gòu)”運(yùn)動(dòng)形式實(shí)現(xiàn)液肥穴施功能,機(jī)構(gòu)本身限制了其運(yùn)動(dòng)特性和工作效率,難以滿足高效液肥穴深施要求。
王金武等[11]設(shè)計(jì)的1YJ-140深施型液肥穴施肥機(jī),扎穴部件通過(guò)曲柄搖桿式驅(qū)動(dòng)機(jī)構(gòu)實(shí)現(xiàn)液肥穴深施功能。由于同樣采用了“桿機(jī)構(gòu)”運(yùn)動(dòng)形式,液肥穴深施效率較低,且穴口較大。在此基礎(chǔ)上,王金武等[12-13]設(shè)計(jì)了SYJ-2深施型液肥穴施肥機(jī),扎穴機(jī)構(gòu)驅(qū)動(dòng)系統(tǒng)采用全橢圓齒輪行星系,提高了扎穴效率,在保證較小穴口和一定施肥深度的前提下,達(dá)到了高速液肥穴深施目的。該機(jī)雖然較好地滿足液肥穴深施要求,但正置式扎穴方式易與作物莖葉發(fā)生機(jī)械碰撞,造成植株損傷,這也是國(guó)外液肥穴施肥機(jī)普遍存在的共性問(wèn)題。
本文結(jié)合東北地區(qū)玉米壟作主導(dǎo)種植模式,基于斜置式扎穴設(shè)計(jì)思想和高效低損輸肥技術(shù)設(shè)計(jì)一種深施型斜置式液肥穴施肥機(jī)。
1 整機(jī)結(jié)構(gòu)與工作原理
1.1 整機(jī)結(jié)構(gòu)
深施型斜置式液肥穴施肥機(jī)主要由機(jī)架總成、差動(dòng)式雙向供肥分配裝置、液態(tài)輸肥主管路、鏈輪、主傳動(dòng)軸、液肥泵、三點(diǎn)懸掛架總成、蝸輪蝸桿減速器、動(dòng)力輸入軸總成、斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)、液肥輸肥支管路、地輪總成、主傳動(dòng)帶等部件組成,如圖1所示。

圖1 穴施肥機(jī)結(jié)構(gòu)簡(jiǎn)圖Fig.1 Schematics of liquid fertilizer hole applicator structure1.機(jī)架總成 2.差動(dòng)式雙向供肥分配裝置 3.液肥輸肥主管路 4.鏈輪A 5.主傳動(dòng)軸 6.液肥泵 7.三點(diǎn)懸掛架總成 8.蝸輪蝸桿減速器 9.動(dòng)力輸入軸總成 10.斜置式非規(guī)則齒輪行星系扎穴機(jī)構(gòu) 11.液肥輸肥支管路 12.地輪總成 13.主傳動(dòng)帶 14.鏈輪B 15鏈輪C 16.鏈輪D
機(jī)架總成前、后部位上分別安裝三點(diǎn)懸掛架總成和地輪總成,且在機(jī)架總成上依次安裝液肥泵、蝸輪蝸桿減速器、動(dòng)力輸入軸總成、主傳動(dòng)軸、差動(dòng)式雙向供肥分配裝置和斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)。主傳動(dòng)帶套裝在蝸輪蝸桿減速器、液肥泵和動(dòng)力輸入軸總成上。液肥輸肥主管路將液肥泵與差動(dòng)式雙向供肥分配裝置連通,液肥輸肥支管路將差動(dòng)式雙向供肥分配裝置與斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)連通,在主傳動(dòng)軸上從外至內(nèi)依次固裝鏈輪A、鏈輪C、鏈輪B和鏈輪D,鏈條將蝸輪蝸桿減速器與鏈輪B連接,鏈輪A和鏈輪D通過(guò)鏈條分別與差動(dòng)式雙向供肥分配裝置連接,通過(guò)鏈條將鏈輪C與斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)連接。
1.2 工作原理
作業(yè)時(shí),通過(guò)三點(diǎn)懸掛架總成將穴施肥機(jī)與牽引拖拉機(jī)連接成一體,由拖拉機(jī)牽引前行,牽引拖拉機(jī)的后動(dòng)力輸出軸與動(dòng)力輸入軸總成連接,旋轉(zhuǎn)的動(dòng)力輸入軸總成通過(guò)主傳動(dòng)帶分別帶動(dòng)蝸輪蝸桿減速器和液肥泵轉(zhuǎn)動(dòng),液肥泵將液肥經(jīng)液態(tài)輸肥主管路送入差動(dòng)式雙向供肥分配裝置內(nèi);蝸輪蝸桿減速器經(jīng)鏈輪B驅(qū)動(dòng)主傳動(dòng)軸轉(zhuǎn)動(dòng),主傳動(dòng)軸帶動(dòng)鏈輪A、鏈輪C和鏈輪D同步轉(zhuǎn)動(dòng)。鏈輪A和鏈輪D驅(qū)動(dòng)差動(dòng)式雙向供肥分配裝置轉(zhuǎn)動(dòng)工作,將液肥經(jīng)輸肥支管路送入斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)內(nèi)。鏈輪C驅(qū)動(dòng)斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)作回轉(zhuǎn)運(yùn)動(dòng),最終完成穴施肥機(jī)的斜置式扎穴與液肥穴深施作業(yè)。穴施肥機(jī)如圖2所示。

圖2 穴施肥機(jī)實(shí)物圖Fig.2 Diagram of liquid fertilizer hole applicator
1.3 技術(shù)參數(shù)
根據(jù)國(guó)內(nèi)北方玉米壟作的主導(dǎo)種植模式及農(nóng)藝要求,設(shè)計(jì)的深施型斜置式液肥穴施肥機(jī)主要技術(shù)參數(shù)如表1所示。

表1 主要技術(shù)參數(shù)Tab.1 Main technological parameters
2 扎穴機(jī)構(gòu)設(shè)計(jì)
2.1 結(jié)構(gòu)與工作原理
為達(dá)到高效扎穴和降低作物損傷目的,設(shè)計(jì)斜置式非規(guī)則行星系扎穴機(jī)構(gòu),如圖3所示。

圖3 斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)Fig.3 Non-circular gears planetary pricking hole mechanism in oblique type1.鏈輪軸 2.斜齒輪 3.法蘭 4.外殼體 5.行星架 6.搖臂 7.噴肥針 8.太陽(yáng)輪 9.太陽(yáng)輪軸 10.中間輪1 11.中間輪2 12.行星輪
斜置式非規(guī)則齒輪行星輪系扎穴機(jī)構(gòu)主要由7個(gè)不同的非規(guī)則齒輪、斜齒輪、法蘭、外殼體、行星架、搖臂和噴肥針等組成。
鏈輪軸與太陽(yáng)輪軸通過(guò)斜齒輪傳動(dòng),太陽(yáng)輪軸貫穿太陽(yáng)輪并與行星架固結(jié),法蘭、太陽(yáng)輪與外殼體固結(jié)。行星架里面的非規(guī)則齒輪(中間輪1、中間輪2和行星輪)初始安裝相位相同,太陽(yáng)輪與行星架同軸,其他6個(gè)非規(guī)則齒輪在太陽(yáng)輪兩邊呈對(duì)稱布置。中間輪1和中間輪2同軸且固結(jié)在一起,中間輪1與太陽(yáng)輪相互嚙合,中間輪2與行星輪相互嚙合。搖臂與噴肥針組成的構(gòu)件固結(jié)在行星輪上。
工作時(shí),動(dòng)力驅(qū)動(dòng)鏈輪軸轉(zhuǎn)動(dòng),在兩個(gè)斜齒輪作用下,太陽(yáng)輪軸使行星架圍繞太陽(yáng)輪轉(zhuǎn)動(dòng)。行星架里面的太陽(yáng)輪固定不動(dòng),當(dāng)行星架轉(zhuǎn)動(dòng)時(shí)行星輪繞太陽(yáng)輪公轉(zhuǎn)并與中間輪2嚙合自轉(zhuǎn),此時(shí)中間輪1圍繞太陽(yáng)輪公轉(zhuǎn)。由于非規(guī)則齒輪實(shí)現(xiàn)非勻速比傳動(dòng),故形成噴肥針尖的特殊運(yùn)動(dòng)軌跡,在外殼體的結(jié)構(gòu)型式下,實(shí)現(xiàn)了斜置式的扎穴要求,減小了對(duì)作物的損傷。
2.2 結(jié)構(gòu)與參數(shù)設(shè)計(jì)
扎穴機(jī)構(gòu)的關(guān)鍵部件為非規(guī)則齒輪行星輪系,本文采用參數(shù)反求設(shè)計(jì)思路并結(jié)合自主開(kāi)發(fā)的扎穴機(jī)構(gòu)運(yùn)動(dòng)學(xué)仿真軟件[14-15]設(shè)計(jì)機(jī)構(gòu)的結(jié)構(gòu)與工作參數(shù)。
首先定義噴肥針較優(yōu)運(yùn)動(dòng)軌跡曲線,在軌跡曲線上選取若干特征型值點(diǎn)(q0,q1,…,q11),通過(guò)三次拉格朗日曲線高精度擬合特性[16],擬合出整條軌跡曲線,同時(shí)建立機(jī)構(gòu)運(yùn)動(dòng)數(shù)學(xué)模型。通過(guò)型值點(diǎn)約束控制軌跡曲線,反求出非規(guī)則齒輪行星系相關(guān)設(shè)計(jì)參數(shù),如圖4a所示。基于Matlab GUI軟件開(kāi)發(fā)平臺(tái),開(kāi)發(fā)參數(shù)反求設(shè)計(jì)與運(yùn)動(dòng)學(xué)分析軟件,對(duì)扎穴機(jī)構(gòu)運(yùn)動(dòng)過(guò)程進(jìn)行模擬仿真,如圖4b所示。在保證株距220 mm、扎穴深度80 mm與扎穴轉(zhuǎn)速75 r/min的約束條件下,輸入機(jī)構(gòu)其他輔助調(diào)節(jié)參數(shù)。以噴肥針高入、出土垂直度和小穴口寬度為優(yōu)化目標(biāo),微調(diào)軌跡型值點(diǎn),得到扎穴機(jī)構(gòu)的非規(guī)則齒輪中心距和非規(guī)則齒輪節(jié)曲線等結(jié)構(gòu)參數(shù),如圖4c所示。
2.3 噴肥針軟管接口運(yùn)動(dòng)軌跡
斜置式非規(guī)則齒輪行星系扎穴機(jī)構(gòu)的結(jié)構(gòu)模型如圖5a所示;建立位移分析坐標(biāo)系,如圖5b所示。其中,O1為O1A1的轉(zhuǎn)動(dòng)中心,X1O1Y1為位移分析坐標(biāo)系,A1為進(jìn)肥軟管接口的轉(zhuǎn)動(dòng)中心,B1為進(jìn)肥軟管接口,O1A1為行星架。

圖5 扎穴機(jī)構(gòu)結(jié)構(gòu)模型與運(yùn)動(dòng)分析示意圖Fig.5 Structure model and kinematic analysis schematics of pricking hole mechanism
噴肥針的進(jìn)肥軟管接口B1軌跡方程為
(1)
式中 (xB1,yB1)——噴肥針的進(jìn)肥軟管接口B1的坐標(biāo),mm
LO1A1——行星架O1A1的長(zhǎng)度,mm
φ1——搖臂A1B1與X1軸的夾角,rad
θ1——行星架O1A1與X1軸的夾角,rad
LA1B1——搖臂長(zhǎng)度,mm
從式(1)可知,噴肥針進(jìn)肥軟管接口B1運(yùn)動(dòng)軌跡由兩種運(yùn)動(dòng)合成:扎穴機(jī)構(gòu)行星架O1A1圍繞旋轉(zhuǎn)中心O1點(diǎn)作等速圓周運(yùn)動(dòng);進(jìn)肥軟管接口B1圍繞轉(zhuǎn)動(dòng)中心A1點(diǎn)作非勻速周期性擺動(dòng)運(yùn)動(dòng)(行星輪與行星架自轉(zhuǎn)運(yùn)動(dòng)的合成)。為避免軟管之間發(fā)生纏繞和干涉,分配裝置的出肥軟管接口需要保證與噴肥針進(jìn)肥軟管接口運(yùn)動(dòng)的一致性與協(xié)調(diào)性。
3 液肥分配機(jī)構(gòu)設(shè)計(jì)
3.1 結(jié)構(gòu)與工作原理
為實(shí)現(xiàn)高效低損輸肥目標(biāo),設(shè)計(jì)差動(dòng)式雙向供肥分配裝置。該裝置可直接與噴肥針軟管接口連接,減小了肥料在輸肥過(guò)程中的能量損失。主要由鏈輪軸殼體、鏈輪軸、主軸套、副軸套、行星輪、內(nèi)齒圈、頂桿、外殼體和空間凸輪等組成。外殼體與鏈輪軸殼體固結(jié),鏈輪軸貫穿鏈輪軸殼體與外殼體內(nèi)的副軸套和主軸套連接。主軸套一端面與副軸套一端面固結(jié);另一端面圓周對(duì)稱鑲嵌2個(gè)行星輪,副軸套另一端面對(duì)稱鑲嵌2個(gè)頂桿。內(nèi)齒圈套在外殼體上,并與行星輪嚙合傳動(dòng),主軸套、行星輪和內(nèi)齒圈組成了差動(dòng)輪系系統(tǒng)。空間凸輪固結(jié)在外殼體內(nèi)并與頂桿配合,副軸套、頂桿和空間凸輪組成了凸輪機(jī)構(gòu)。機(jī)構(gòu)二維模型如圖6所示;三維模型如圖7所示。

圖6 差動(dòng)式雙向供肥分配裝置機(jī)構(gòu)二維模型Fig.6 Two-dimensional of distribution mechanism1.鏈輪軸殼體 2.外殼體 3.內(nèi)齒圈 4.行星輪 5.鏈輪軸 6.主軸套 7.副軸套 8.頂桿 9.空間凸輪

圖7 差動(dòng)式雙向供肥分配裝置機(jī)構(gòu)三維模型Fig.7 Three-dimensional model of distribution mechanism
工作時(shí),外動(dòng)力源分別驅(qū)動(dòng)鏈輪軸和內(nèi)齒圈。鏈輪軸帶動(dòng)主軸套與副軸套作旋轉(zhuǎn)運(yùn)動(dòng),鑲嵌主軸套內(nèi)的行星輪運(yùn)動(dòng)形式為圍繞軸心線自轉(zhuǎn)與鏈輪軸心線公轉(zhuǎn)的合成運(yùn)動(dòng),差動(dòng)輪系系統(tǒng)的運(yùn)轉(zhuǎn)使得行星輪角速度為零;空間凸輪機(jī)構(gòu)使得副軸套內(nèi)頂桿在空間凸輪廓線上作旋轉(zhuǎn)和往復(fù)直線運(yùn)動(dòng),保證與行星輪同步公轉(zhuǎn)的同時(shí),實(shí)現(xiàn)出肥口的打開(kāi)和閉合。液肥以一定壓力從進(jìn)肥孔流入,當(dāng)頂桿運(yùn)動(dòng)到空間凸輪的推程到回程階段時(shí),液肥從出肥孔流出,經(jīng)軟管由噴肥針施入土壤中,圖6中紅色曲線為液肥流動(dòng)軌跡;當(dāng)頂桿運(yùn)動(dòng)到近休止階段時(shí),頂桿關(guān)閉,液肥停止噴施。
3.2 結(jié)構(gòu)與參數(shù)設(shè)計(jì)
3.2.1雙行星輪-內(nèi)齒圈組合機(jī)構(gòu)
噴肥針在一個(gè)工作周期內(nèi)在入土和出土過(guò)程自身最大擺動(dòng)位移如圖8所示,其擺動(dòng)角為47.6°(黑色圓圈為軟管接口)。為使出肥軟管接口與進(jìn)肥軟管接口運(yùn)動(dòng)形式一致,采用雙行星輪-內(nèi)齒圈組合機(jī)構(gòu),滿足分配裝置出肥軟管接口自轉(zhuǎn)角速度為零(角位移為零)和圍繞鏈輪軸心線公轉(zhuǎn)的運(yùn)動(dòng)匹配要求,解決了分配裝置與斜置式扎穴機(jī)構(gòu)之間連接軟管干涉的問(wèn)題[17]。
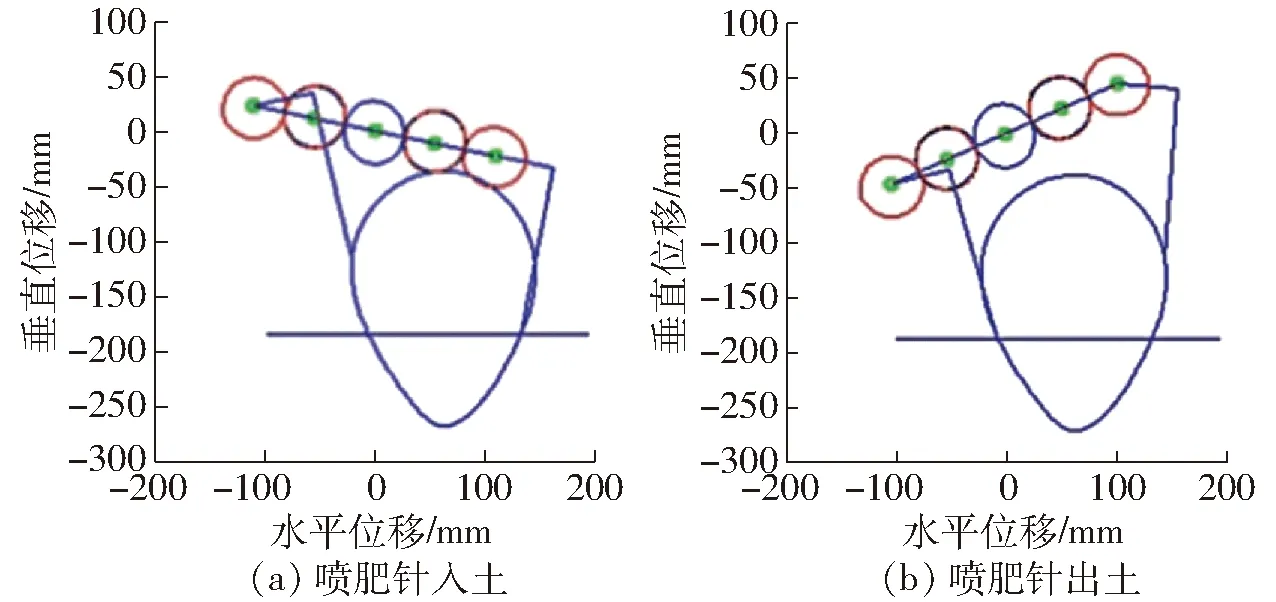
圖8 噴肥針軟管接口處擺角變化Fig.8 Swing angle change of spraying fertilizer needle hose mouth
雙行星輪-內(nèi)齒圈組合機(jī)構(gòu)結(jié)構(gòu)簡(jiǎn)圖如圖9所示。
綜合考慮差動(dòng)式雙向供肥分配裝置的結(jié)構(gòu)尺寸,設(shè)定機(jī)構(gòu)中內(nèi)齒圈與行星輪的齒數(shù)分別為75和25,可得內(nèi)齒圈與行星輪的傳動(dòng)比[18-19]
(2)
式中ω1——內(nèi)齒圈角速度,rad/s
ω2——行星輪角速度,rad/s
ωH——鏈輪軸角速度,rad/s
ω1H——轉(zhuǎn)化后內(nèi)齒圈角速度,rad/s
ω2H——轉(zhuǎn)化后行星輪角速度,rad/s
z1——內(nèi)齒圈齒數(shù)z2——行星輪齒數(shù)
根據(jù)行星輪角速度為零的特性要求,求得
(3)
即鏈輪軸與內(nèi)齒圈角速度之比為3∶2,機(jī)構(gòu)三維結(jié)構(gòu)如圖10所示。

圖10 雙行星輪-內(nèi)齒圈組合機(jī)構(gòu)三維結(jié)構(gòu)圖Fig.10 Three-dimensional structure of double planetary gears-annular gear1.行星輪 2.內(nèi)齒圈
3.2.2空間凸輪機(jī)構(gòu)
空間凸輪需滿足頂桿在其廓線滑動(dòng)時(shí),噴肥針入土即噴肥,出土即停噴,如圖11所示。

圖11 空間凸輪機(jī)構(gòu)Fig.11 Space cam mechanism1.滾子 2.頂桿 3.空間凸輪
頂桿在推程和回程階段的運(yùn)動(dòng)可采用簡(jiǎn)諧運(yùn)動(dòng)規(guī)律,空間凸輪廓線可采用展開(kāi)法求得,如圖12所示。橫坐標(biāo)表示凸輪轉(zhuǎn)角,用δ表示;縱坐標(biāo)表示頂桿位移,用s表示,則展開(kāi)的理論廓線坐標(biāo)為[20-22]

圖12 空間凸輪廓線展開(kāi)圖Fig.12 Expansion drawing of space cam lineament

(4)
式中 (x1,y1)——空間凸輪理論廓線坐標(biāo),mm
r0——平均圓柱半徑,mm
頂桿位移采用余弦加速度運(yùn)動(dòng)規(guī)律求解
(5)
式中h——頂桿行程,mm
δ01——推程運(yùn)動(dòng)角,rad
δ02——回程運(yùn)動(dòng)角,rad
工作輪廓曲線為
(6)
其中
式中 (x2,y2)——凸輪工作廓線坐標(biāo),mm
rr——頂桿滾子半徑,mm
α——壓力角,rad
dx1——x1的增量
dy1——y1的增量
dδ——δ的增量
根據(jù)差動(dòng)式雙向供肥分配裝置整體結(jié)構(gòu)尺寸,確定空間凸輪機(jī)構(gòu)的平均圓柱半徑為50 mm,行程最大值為6 mm,頂桿滾子半徑為10 mm。通過(guò)噴肥針入、出土方向與水平面的夾角確定空間凸輪的推程運(yùn)動(dòng)角為31.8,回程運(yùn)動(dòng)角為25.6,如圖13所示。獲得凸輪三維模型如圖14所示。

圖13 噴肥針入土與出土二維簡(jiǎn)圖Fig.13 Two-dimensional structure diagram of spraying fertilizer earthing and unearthing

圖14 空間凸輪三維模型Fig.14 Three-dimensional model of space cam
3.3 行星輪出肥軟管接口與輪齒運(yùn)動(dòng)軌跡分析
根據(jù)雙行星輪-內(nèi)齒圈的機(jī)構(gòu)特點(diǎn),將其簡(jiǎn)化為結(jié)構(gòu)示意圖,并建立直角坐標(biāo)系,如圖15所示。其中,O為行星輪公轉(zhuǎn)的轉(zhuǎn)動(dòng)中心,XOY為在轉(zhuǎn)動(dòng)中心O處建立的直角坐標(biāo)系,A為行星輪自轉(zhuǎn)的轉(zhuǎn)動(dòng)中心,B為行星輪某一輪齒頂點(diǎn),OA為行星架。

圖15 雙行星輪-內(nèi)齒圈結(jié)構(gòu)示意圖Fig.15 Structure diagram combination mechanism of double planetary gears-annular
由于A點(diǎn)為行星輪自轉(zhuǎn)的轉(zhuǎn)動(dòng)中心亦是行星架OA的一個(gè)端點(diǎn),故A點(diǎn)圍繞行星輪公轉(zhuǎn)的轉(zhuǎn)動(dòng)中心O點(diǎn)作半徑LOA的圓周運(yùn)動(dòng),其軌跡是以O(shè)點(diǎn)為圓心,半徑為L(zhǎng)OA的圓形軌跡。OA逆時(shí)針轉(zhuǎn)動(dòng)θ為正,反之為負(fù),軌跡方程為
(7)
式中 (xA,yA)——A點(diǎn)坐標(biāo),mm
θ——行星架OA與X軸的夾角,rad
LOA——行星架OA的長(zhǎng)度,mm
行星輪的某一輪齒頂點(diǎn)B相對(duì)于A點(diǎn)的運(yùn)動(dòng)軌跡方程為
(8)
式中LAB——行星輪某一輪齒頂點(diǎn)B到轉(zhuǎn)動(dòng)中心A點(diǎn)的距離,mm
φ——邊線AB與X軸的夾角,rad
行星輪的某一輪齒頂點(diǎn)B的絕對(duì)運(yùn)動(dòng)軌跡方程為
(9)
雙行星輪-內(nèi)齒圈組合機(jī)構(gòu)在運(yùn)動(dòng)過(guò)程中行星輪的角速度為零,即φ為常數(shù),則式(8)中LABcosφ與LABsinφ為常數(shù)。式(9)中行星輪的某一輪齒頂點(diǎn)B的運(yùn)動(dòng)軌跡是以(LABcosφ,LABsinφ)為轉(zhuǎn)動(dòng)中心,LOA為半徑的圓。頂點(diǎn)B的運(yùn)動(dòng)軌跡與轉(zhuǎn)動(dòng)中心A的運(yùn)動(dòng)軌跡形狀相同,只是頂點(diǎn)B的轉(zhuǎn)動(dòng)中心沿X軸方向移動(dòng)LABcosφ,沿著Y軸方向移動(dòng)LABsinφ。
分析可知,分配裝置行星輪頂點(diǎn)B(即出肥軟管接口)與扎穴機(jī)構(gòu)噴肥針頂點(diǎn)B1(即進(jìn)肥軟管接口)運(yùn)動(dòng)形式一致。不同之處在于頂點(diǎn)B圍繞轉(zhuǎn)動(dòng)中心A并無(wú)相對(duì)運(yùn)動(dòng);頂點(diǎn)B1圍繞轉(zhuǎn)動(dòng)中心A1存在一定角度變化的周期性擺動(dòng)。AB與A1B1無(wú)相對(duì)的周期性圓周運(yùn)動(dòng),解決了每個(gè)輸肥軟管的自身“擰緊”問(wèn)題;AB與A1B1分別圍繞各自轉(zhuǎn)動(dòng)中心O、O1公轉(zhuǎn)且轉(zhuǎn)速一致,解決了兩個(gè)輸肥軟管的纏繞問(wèn)題,如圖16所示。

圖16 軟管安裝示意圖Fig.16 Diagram of hose installation
4 田間性能試驗(yàn)
4.1 試驗(yàn)條件
深施型斜置式液肥穴施肥機(jī)的田間試驗(yàn)包括扎穴性能、施肥性能與作物損傷率測(cè)試試驗(yàn)。選擇試驗(yàn)對(duì)象為玉米,施肥時(shí)間為中耕施肥期。為保證機(jī)具工作要求,前期播種滿足行距650 mm和株距220 mm的主導(dǎo)種植模式要求[23-24],本試驗(yàn)選擇玉米種子?xùn)|農(nóng)253號(hào)。試驗(yàn)地點(diǎn)為哈爾濱市阿城區(qū)東北農(nóng)業(yè)大學(xué)試驗(yàn)田;試驗(yàn)時(shí)間為2018年6月29日;液肥為尿素水溶液;試驗(yàn)地尺寸130 m×50 m;環(huán)境溫度22.7~26.1℃,環(huán)境濕度47.9%~50.3%;土壤含水率15%~25%;土壤硬度0.6~1.0 MPa。作物生長(zhǎng)狀態(tài)如圖17所示,作業(yè)情況如圖18所示。
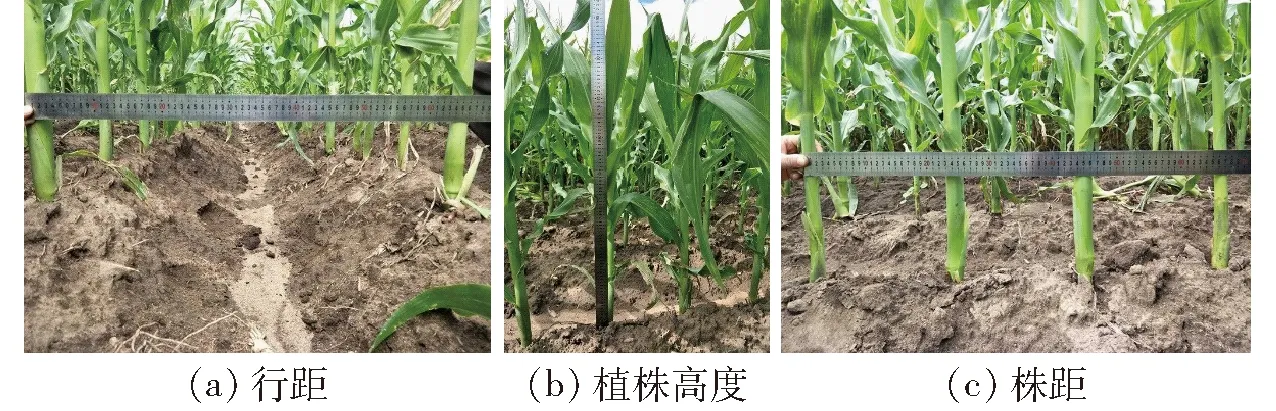
圖17 田間作業(yè)要求Fig.17 Field operation requirement

圖18 穴施肥機(jī)作業(yè)情況Fig.18 Operation condition of liquid fertilizer hole applicator
4.2 試驗(yàn)設(shè)備及方法
試驗(yàn)設(shè)備為鋼板尺、秒表與量筒,鋼板尺主要用于測(cè)量穴口寬度;秒表用于校準(zhǔn)穴施肥機(jī)在田間作業(yè)時(shí)的工作速度和扎穴轉(zhuǎn)速;量筒用于測(cè)量施肥量。將試驗(yàn)田按行數(shù)進(jìn)行標(biāo)定,每行隨機(jī)抽取1塊施肥區(qū)域進(jìn)行穴口寬度的測(cè)量,穴口為100個(gè),同時(shí)記錄作物損傷率(包括行星架部件打掉葉子和噴肥針扎葉、莖等受到的不同程度損傷)。記錄穴口寬度、施肥量、施肥深度和作物損傷率。
4.3 試驗(yàn)結(jié)果及分析
從田間試驗(yàn)檢測(cè)數(shù)據(jù)獲知,穴口寬度平均值為45.0 mm、作物損傷率為0.3%、施肥量為28.5 mL/次、施肥深度為102 mm。根據(jù)穴口成形機(jī)理可知,影響穴口寬度的主要原因?yàn)樵C(jī)構(gòu)轉(zhuǎn)速與前進(jìn)速度的配合關(guān)系,在噴肥針入、出土過(guò)程中,其水平分速度與前進(jìn)速度大小接近且方向相反時(shí),穴口寬度達(dá)到最小,絕對(duì)運(yùn)動(dòng)軌跡曲線為“標(biāo)準(zhǔn)擺線”。在田間進(jìn)行試驗(yàn)檢測(cè)時(shí),由于滑移率的存在,致使整機(jī)前進(jìn)速度相對(duì)于軟件優(yōu)化分析的實(shí)際作業(yè)速度小,即噴肥針入、出土過(guò)程水平分速度平均值略大于前進(jìn)速度,形成的軌跡曲線接近“余擺線”,因此整機(jī)實(shí)際測(cè)量的穴口寬度略大。其他指標(biāo)與前期理論計(jì)算基本一致。結(jié)果表明,設(shè)計(jì)的深施型斜置式液肥穴施肥機(jī)扎穴性能優(yōu)越,肥料噴射均勻,對(duì)作物的機(jī)械損傷小。相比國(guó)內(nèi)其他液肥穴施肥代表機(jī)具[11]作物損傷率由3.2%降低為0.3%;較國(guó)外液肥穴施肥機(jī)具[25]施肥深度提高了22 mm、施肥量提高了10 mL/次。穴施肥機(jī)田間試驗(yàn)結(jié)果均達(dá)到了各項(xiàng)農(nóng)藝技術(shù)指標(biāo)要求。
5 結(jié)論
(1)為加快液肥穴施技術(shù)發(fā)展,以東北地區(qū)玉米壟作主導(dǎo)種植模式為基礎(chǔ),基于斜置式扎穴設(shè)計(jì)思想,設(shè)計(jì)了一種深施型斜置式液肥穴施肥機(jī),實(shí)現(xiàn)了高效液肥穴施與降低作物損傷的目標(biāo)。
(2)基于人機(jī)交互平臺(tái)與非規(guī)則齒輪嚙合機(jī)理,設(shè)計(jì)了整機(jī)關(guān)鍵部件——斜置式非規(guī)則行星系扎穴機(jī)構(gòu),實(shí)現(xiàn)了小穴口寬度的目標(biāo)。采用差動(dòng)輪系運(yùn)動(dòng)機(jī)理,設(shè)計(jì)了差動(dòng)式雙向供肥分配裝置,解決了與扎穴機(jī)構(gòu)連接軟管交互纏繞問(wèn)題,達(dá)到了高效噴肥的目的。
(3)田間試驗(yàn)結(jié)果表明,該機(jī)扎穴性能優(yōu)越,肥料噴射均勻,對(duì)作物的機(jī)械損傷小。穴口寬度、作物損傷率、施肥量和施肥深度分別為45.0 mm、0.3%、28.5 mL/次和102 mm,各項(xiàng)指標(biāo)與前期設(shè)計(jì)差異較小,且符合農(nóng)藝要求。