基于RSSI的WiFi指紋定位數據融合算法研究
2020-04-22 20:27:38王孟妍崔學榮張國平李娟陳海華黃庭培
微型電腦應用 2020年3期
關鍵詞:卡爾曼濾波
王孟妍 崔學榮 張國平 李娟 陳海華 黃庭培

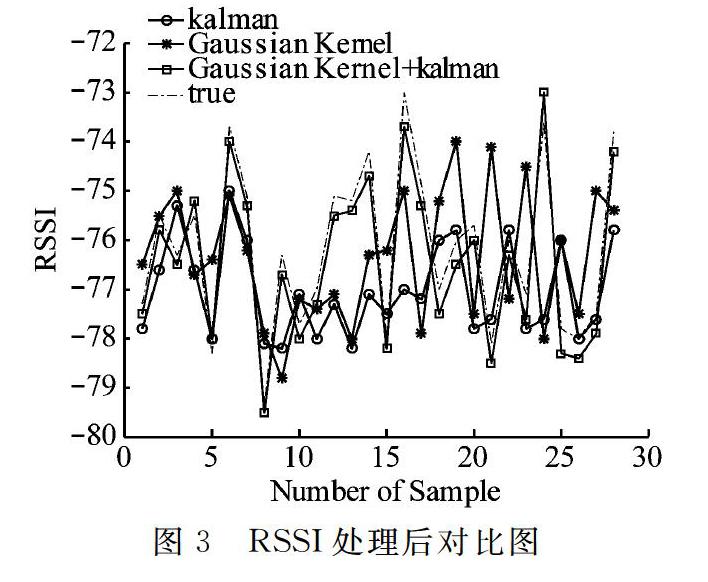

摘 要:目前已有的位置指紋室內定位算法大多都是建立在原始指紋數據庫的基礎上,指紋數據庫的建立精度會直接影響到最后的定位精度,因此在基于WiFi的定位技術中,對接收信號強度(received signal strength indication,RSSI)的穩定性要求比較高。通過對指紋數據的研究,提出了一種基于高斯核函數融合卡爾曼濾波對數據進行預處理的方法。實驗證明,該融合算法能有效剔除RSSI指紋數據中的突變數據和噪聲波動,實現RSSI值的準確、平滑輸出,從而建立準確的指紋數據庫,使后期的定位結果更加精確。
關鍵詞:接收信號強度; 高斯核函數; 卡爾曼濾波; 指紋數據庫
中圖分類號: TN914
文獻標志碼: A
Abstract:Currently, most of the existing location fingerprint indoor positioning algorithms are based on the original fingerprint database. The accuracy of the fingerprint database will directly affect the final positioning accuracy. Therefore, in the positioning technology of WiFi, the stability of received signal strength indication (RSSI) is high relative. Based on the study of fingerprint data, the novel data processing algorithm that fuses Gaussian kernel function and Kalman filtering is proposed. The experiments verify that this fusion algorithm effectively eliminates the mutation data and noise fluctuation in RSSI data, and implements the precise and smooth output of RSSI. Thus an accurate fingerprint database can be established and it makes the later positioning results more accurate.
Key words:RSSI; Gaussian kernel function; Kalman filter; Fingerprint database
0 引言
近年來,隨著科技的高速發展以及人們生活品質的不斷提高,定位服務的市場迅速發展,定位服務的需求量也呈現出飛速發展的趨勢,基于位置的服務LBS(Location-Bases Services)受到了人們的廣泛的關注。對于戶外環境下的定位,全球導航衛星系統GNSS(Global Navigation Satellite System)[1]能夠提供很精確的定位結果,是一種成熟的定位技術,且應用非常廣泛。但是對于一些建筑物比較密集的區域或者室內環境中,衛星信號強度由于受到建筑物或者室內環境的一些遮擋物的影響而大幅度衰減,無法達到較好的定位結果甚至無法定位。醫院以及一些商場的位置服務、室內環境下的應急救援、一些特殊人群的監護等領域都需要精確的位置信息,以至于室內精確的位置信息顯得尤為重要[2,3]。針對這個問題人們探索了很多技術方案以滿足室內定位服務的需求。目前,WiFi被廣泛應用于城市的公共接入熱點,以及家庭網絡和辦公網絡,所以基于WiFi的室內定位技術能夠充分利用目前室內普遍存在的WiFi信號,不需要增加任何額外的硬件設備,大大降低了室內定位的成本,并能保證定位精度和定位服務的覆蓋面[4]。
基于WiFi的室內定位技術中應用最多的是信號指紋定位法[5]。該方法主要包括兩個階段[6]:第一階段是訓練階段(也有被稱為離線階段),此階段的主要任務就是在定位區域均勻并且合理地設置若干個指紋參考點,然后在這些指紋參考點所在的位置進行信號采集,最后將所取得的位置指紋信息建立指紋數據庫;第二階段是在線定位階段,該階段的主要工作是在要進行定位的位置點實時采集各個AP(Access Point)信號值,采用位置指紋定位算法估計出待定位點的準確位置。位置指紋定位的流程如圖1所示:
從圖中可以看出,本文提出的基于高斯核函數融合卡爾曼濾波方法的誤差是最小的。同時,本文提出的算法中59個坐標位置的定位誤差總和也是3種算法中最小的,平均誤差為2.2 m。實驗證明本文提出的于高斯核函數融合卡爾曼濾波方法能使估計坐標更接近真實坐標。
3 總結
室內環境的復雜性使得測得的RSSI樣本的總體無法用一種函數準確的估計其分布,因此要想有效的提高定位精度的關鍵之一就是準確的估計RSSI樣本總體的分布。本文的基于高斯核函數和卡爾曼濾波的融合算法既可以有效地剔除采集得到RSSI信號中的奇異值,又可以消除數據的波動,從而使得位置估計更加準確。實驗效果顯示本文提出的算法比傳統的定位算法的定位精度有顯著的提高。
參考文獻
[1] HAN G, XU H, DUONG T Q, et al. Localization algorithms of Wireless Sensor Networks: a survey [J]. Telecommunication Systems, 2013, 52(4): 2419-2436.
[2] 張忠娟. 基于UWB的室內定位技術研究 [D]. 天津:天津大學, 2012.
[3] 任小麗. 基于UWB/GIS技術的室內定位系統研究 [D]. 上海:華東師范大學, 2010.
[4] 陳淑敏, 喬曉田, 毛佳, 等. 基于接收信號強度(RSSI)的室內二次定位方法 [J]. 傳感技術學報, 2015, 28(4): 572-577.
[5] FANG S, LIN T. A dynamic system approach for radio location fingerprinting in wireless local area networks [J]. IEEE Transactions on Communications, 2010, 58(4): 1020-1025.
[6] PEI L, LIU J, CHEN Y, et al. Evaluation of fingerprinting-based WiFi indoor localization coexisted with Bluetooth [J]. The Journal of Global Positioning Systems, 2017, 15(1): 3.
[7] FANG S, LIN T, LEE K. A Novel Algorithm for Multipath Fingerprinting in Indoor WLAN Environments [J]. IEEE Transactions on Wireless Communications, 2008, 7(9): 3579-3588.
[8] MAZUELAS S, BAHILLO A, LORENZO R M, et al. Robust Indoor Positioning Provided by Real-Time RSSI Values in Unmodified WLAN Networks [J]. IEEE Journal of Selected Topics in Signal Processing, 2009, 3(5): 821-831.
[9] 陳霞, 陳曉, 鄒勝男. 基于正態檢驗的室內定位算法 [J]. 激光雜志, 2017, 38(3): 41-45.
[10] Q L Y, W Z L, Q W, et al. Nonparametric Statistics Methods [M]. Chendu:Southwest Jiaotong University Press. 2010.
[11] HUANG Y, QI B, CHEN S. Modification of advanced boundary discriminative noise detection algorithm[C]// Proceedings of the 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12-14 June 2013: 961-966.
[12] 萬群, 郭賢生, 陳章鑫. 室內定位理論、方法和應用 [M]. 北京:電子工業出版社, 2012.
[13] 仲江濤, 秦斌, 吳健春, 等. 基于Kalman濾波的Chan室內定位算法改進[J]. 通信技術, 2017, 50(10): 2223-2228.
[14] BARSOCCHI P, CRIVELLO A, ROSA D L, et al. A multisource and multivariate dataset for indoor localization methods based on WLAN and geo-magnetic field fingerprinting [C]// Proceedings of the 2016 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, 4-7 Oct. 2016: 1-8.
(收稿日期: 2019.01.24)
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
