基于模糊Elman網絡算法的移動機器人路徑規劃分析
2020-04-22 20:27:38榮蓉
微型電腦應用 2020年3期
關鍵詞:移動機器人
榮蓉
摘 要:為了調正移動機器人避障線路,建立了基于模糊Elman網絡算法的移動機器人路徑規劃模型,并應用進行Matlab仿真分析。利用現有障礙物的距離信息來實現機器人步長的實施可控制與調節,防止移動機器人在做出準確避障行為之后因為沒有設定合適的步長而導致撞上障礙物,以0.5作為機器人的最初運動步長。仿真結果表明,采用模糊Elman網絡可以獲得比其它兩種方法更優的路徑規劃效果,同時對障礙物進行高效避讓,由此實現最優的路徑規劃。采用模糊Elman網絡來構建得到的路徑規劃算法能夠滿足規劃任務的要求,同時還能夠根據機器人處于不同工作空間中的情況進行靈活調整。
關鍵詞:模糊Elman網絡算法; 移動機器人; 路徑規劃; 避障
中圖分類號: TM715
文獻標志碼: A
Abstract:In order to raise the obstacle avoidance line, a path planning model of mobile robot based on fuzzy Elman network algorithm was established, and Matlab simulation analysis was carried out. In this study, distance information of existing obstacles was used to realize controllable and adjustable robot step length, so as to prevent the mobile robot from colliding with obstacles due to not setting appropriate step length after making accurate obstacle avoidance behavior. 0.5 is taken as the initial movement step length of the robot. Simulation results show that the fuzzy Elman network can achieve better path planning effect than the other two methods, and at the same time, avoid obstacles efficiently, so as to achieve the optimal path planning. The path planning algorithm constructed by fuzzy Elman network can meet the requirements of planning tasks, and can be flexibly adjusted according to different working spaces of robots.
Key words:Fuzzy Elman network algorithm; Mobile robots; Path planning; Obstacle avoidance
0 引言
為了使移動機器人順利完成運動路徑控制,需要采用路徑規劃技術來保證機器人順利規避運動階段遇到的各類障礙物,并迅速找到最優替代路徑[1-5]。為充分提高路徑規劃過程的靈活性并快速適應不同路徑狀況,選擇模糊Elman網絡理論作為分析架構,構建得到路徑規劃算法,同時具備Elman網絡以及模糊控制的共同優點,表現出了優異的信息并行處理以及泛化分析性能,可以將其用于處理一些不確定信息,同時還可以把專家的經驗也轉變成以網絡形式進行輸入與輸出的映射,上述映射關系可通過模糊Elman網絡來精確表達,從而為移動機器人提供更優的路徑規劃方案[6-8]。
相關方面的研究吸引了很多的研究學者。文獻[9]利用神經網絡來實現無人飛行器的航跡規劃過程,同時選擇帝國競爭算法來訓練該網絡,同時對比了該算法和人工蜂群算法之間的各自優勢與差異性。文獻等[10]同時設置了動態與靜態兩種障礙物再對機器人進行自主移動測試,通過Q學習和神經網絡算法相結合的方式實施路徑規劃。文獻[11]則在生物激勵神經網絡中加入了障礙物傳感器以及運動狀態分析模塊以實現更優的控制效果,同時利用這一網絡對船舶除銹機器人實施路徑規劃。文獻[12]采用DHPSO和工神經網絡相結合的方式來構建得到規劃算法模型,在該模型中障礙物信息通過多層前向網絡來表示。本文在前人研究的基礎上,為了調高移動機器人避障線路,本位建立基于模糊Elman網絡算法的移動機器人路徑規劃模型,并展開Matlab仿真分析。
1 模糊Elman網絡算法
1.1 網絡輸入輸出及模糊化
進入未知工作環境中后,移動機器人需對自身所處的周邊環境進行數據收集后再實施路徑規劃,決策過程需要以獲得的環境信息作為參考依據[13-14]。本文先假定能夠得到機器人與正前方障礙物之間的距離F,以及位于機器人左右45°角范圍內的障礙物距離,設定最遠測試距離等于3 m,并且機器人可以得到目標點產生的方位數據tg,其中,tg是目標點和機器人所在部位連線與X軸之間形成的夾角,測試角度是-180°~+180°。
為采用標準化方法來設計模糊Elman網絡的路徑規劃算法,應采用論域變換方法處理各精確輸入量,再對距離參數[L,F,R]以及目標方位tg進行變換使其處于標準論域[-1/+1]內。以[a/b]來表示輸入論域范圍。
考慮到采用模糊Elman網絡并不能對精確輸入的數據直接處理,這就要求采用論域變換得到輸入量再對其實施模糊化操作,再將其表示為模糊語言的形式。以{Near、Far}表示障礙物距離[L、F、R]對應的模糊子集,包括近(Near)與遠(Far)兩種模糊語言;以{RB、RS、ZO、LS、LB}來表示tg模糊子集,總共包含以下幾種模糊語言:右小、右大、零、左小、左大。從圖3-1中可以看到距離量L、F、R對應的隸屬度函數。
1.2 網絡控制規則設計
模糊Elman網絡根據專家經驗來設計控制規則,同時也能夠體現網絡輸入量和輸出量的變化關系。當機器人在運動期間探測到與周圍障礙物不斷接近的情況下,應適當改變機器人的運動方向,避免機器人撞到障礙物。機器人實現避障功能的具體原理為:如果當前障礙物和機器人相距很近時,應根據障礙物分布狀態以及目標信息進行響應;如果現有障礙物和機器人之間的距離比較遠,可以按照目標方位信息來完成響應,并使機器人往目標點方向繼續移動。
因為障礙物可以和機器人之間形成8種分布狀態,各狀態對應的目標點可以形成5種方位信息,因此可以為機器人路徑規劃構建40條控制規則。
1.3 網絡結構設計
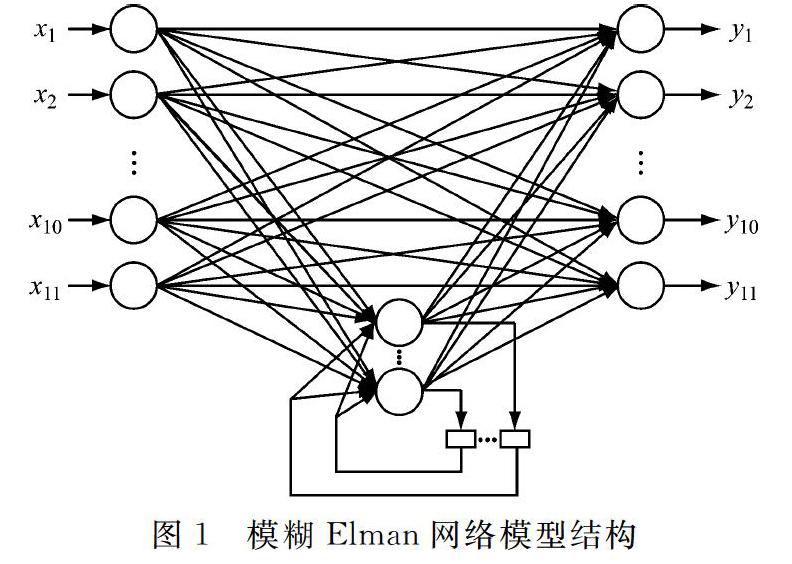
通過避障模糊控制規則訓練模糊Elman網絡,以訓練得到的網絡作為規則存儲器,通過并行計算來提高模糊運算性能,把機器人從外部環境中采集得到的數據信息傳輸到模糊Elman網絡內,再對計算得到的解進行模糊處理來實現避障的功能,由此完成對移動機器人的路徑規劃控制。從圖1中可以看到本文選擇的模糊Elman網絡,此模型以x1~x2輸入神經元構成障礙物距離L包含的所有模糊子集,同時以x3~x4作為障礙物距離F對應的模糊子集,以x5~x6作為障礙物形成距離R情況下包含的模糊子集,以x7~x11構成目標方位tg包含的所有模糊子集,以y1~y11構成機器人的轉角sa對應的模糊子集,由此得到模糊Elman網絡中總共包含了11個輸入神經元,同時形成了11個輸出神經元,通過多次測試后確定隱含層神經元的數量等于25。
對模糊Elman網絡進行訓練的過程中,應選擇數值樣本來描述輸入輸出模糊子集。考慮到在模糊Elman網絡內各輸出神經元分別對應于輸出變量空間的特定量化值,因此可選擇隸屬函數來表達輸出模糊子集。
2 結果分析
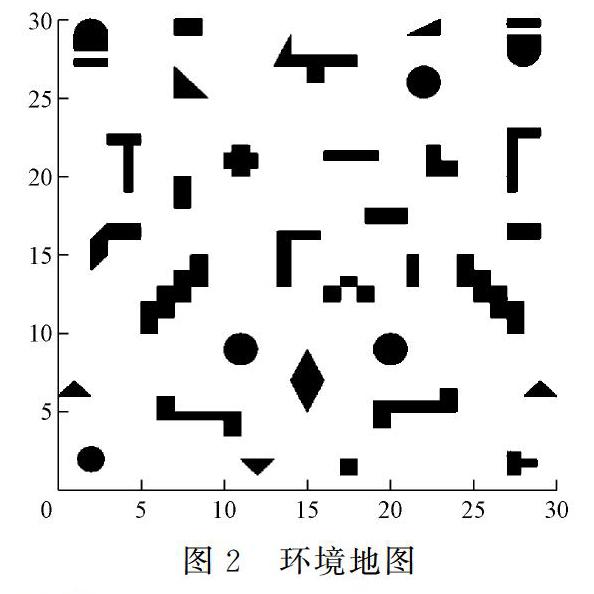
本研究采用Matlab軟件來驗證采用模糊Elman網絡完成路徑規劃算法時是否具備可行性條件。把機器人作為一個移動質點,構建得到靜態環境地圖,如圖2所示。
可以看到存在許多黑色障礙物,以S(3.5,7.5)作為路徑規劃起點,并以E(24.5,24.5)作為目標位置。對圖2進行分析可以發現,輸出變量sa總共被分成11個論域,將其表示為[-1/+1],此時c1/c2/…ct依次對應于-1/-0.8/…/1。
根據以上分析可知,各種情況下的避障模糊控制規則都可以采用輸入與輸出數值來表示,由此獲得模糊Elman神經網絡包含的所有訓練樣本,同時針對40條控制規則依次生成了40組網絡訓練樣本。
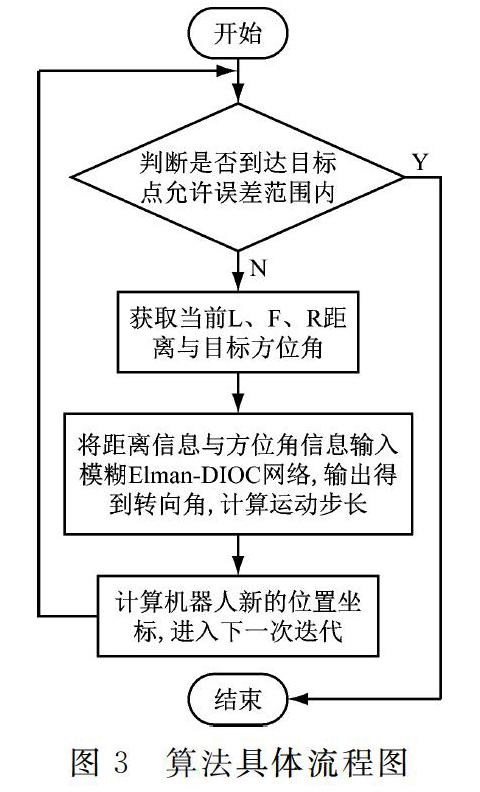
以11-25-11結構構建模糊Elman網絡的拓撲系統,同時把目標誤差設定在0.001,采用Logsig函數構建得到模糊Elman網絡隱含層包含的所有激勵函數f,同時以Purelin函數構建輸出層激勵函數g,再以梯度下降法來訓練模糊Elman網絡,同時將訓練次數的最大值設定在3 000。確保該網絡產生的輸出變量sa能夠和移動機器人形成良好匹配的運動步長,由此得到迭代期間機器人每次通過直線移動形成的距離,利用現有障礙物的距離信息來實現機器人步長的實施可控制與調節,防止移動機器人在做出準確避障行為之后因為沒有設定合適的步長而導致撞上障礙物的結果,以0.5作為機器人的最初運動步長。采用模糊Elman網絡來完成路徑規劃的具體算法,如圖3所示。
在測試算法性能的過程中,綜合運用人工勢場以及Elman神經網絡來完成路徑規劃,同時將得到的結果和模糊Elman網絡規劃實施了對比。因為使用模糊Elman網絡分析方法時只根據現有環境信息實施規劃,并且采用該網絡進行訓練的每次權值間都存在一定的差異性,為消除測試誤差的影響,需要采用同樣的環境地圖開展10次規劃,得到表1所示的結果,可以看到,采用人工勢場法進行規劃時得到了同樣大小的路徑長度。
根據表1可以發現,與Elman神經網絡模型相比,采用模糊Elman網絡路徑規劃方法可以獲得更高的成功概率,并
使最優路徑長度減小4.2%,同時平均路徑長度能夠減小7.8%;與人工勢場法相比,采用模糊Elman網絡以及規劃得到的成功次數都是10次,并使最優路徑長度減小幅度達到13.1%,同時減小了11.8的平均路徑長度。通過仿真測試發現,采用模糊Elman網絡可以獲得比其它兩種方法更優的路徑規劃效果,同時對障礙物進行高效避讓,由此實現最優的路徑規劃。
當移動機器人進行運動時,還會遇到一些臨時出現的障礙物導致機器人的運動過程受到阻礙,圖4給出了對上述情況進行仿真得到的結果。通過測試發現,在移動機器人運動至(8.74,11.77)位置時,在(9.6,12.6)部位產生了新的障礙物,本算法可以根據周邊環境信息變化特征,利用模糊Elman網絡來完成分析過程,通過對輸出結果進行模糊處理來完成對障礙物的避障目的,可以看到,當機器人到達靠近(9.9,11.49)的區域時可以靈活躲避新障礙物的影響,并繼續朝目標點前進。通過上述仿真測試可以發現,采用模糊Elman網絡來構建得到的路徑規劃算法能夠滿足規劃任務的要求,同時還能夠根據機器人處于不同工作空間中的情況進行靈活調整。
3 總結
1) 本研究采用Matlab軟件來驗證采用模糊Elman網絡完成路徑規劃算法時是否具備可行性條件,利用現有障礙物的距離信息來實現機器人步長的實施可控制與調節,防止移動機器人在做出準確避障行為之后因為沒有設定合適的步長而導致撞上障礙物的結果,以0.5作為機器人的最初運動步長。
2) 采用模糊Elman網絡可以獲得比其它兩種方法更優的路徑規劃效果,同時對障礙物進行高效避讓,由此實現最優的路徑規劃。采用模糊Elman網絡來構建得到的路徑規劃算法能夠滿足規劃任務的要求,同時還能夠根據機器人處于不同工作空間中的情況進行靈活調整。
參考文獻
[1]?周文卷. 復雜環境下自主移動機器人路徑規劃方法的研究[D]. 長春:吉林大學, 2014.
[2] Qu Y, Zhang Y, Zhang Y. A Global Path Planning Algorithm for Fixed-wing UAVs[J]. Journal of Intelligent & Robotic Systems, 2018, 91(3-4): 691-707.
[3] Yuan M, Wang S, Canyang W U, et al. APF-guided adaptive immune network algorithm for robot path planning[J]. Frontiers of Computer Science, 2009, 3(2): 247-255.
[4]?韓顏,許燕,周建平.粒子群-蟻群融合算法的機器人路徑規劃[J].組合機床與自動化加工技術,2020,36(2):47-50.
[5] 范世鵬, 祁琪, 路坤鋒,等. 基于改進人工勢場法的巡航導彈自主避障技術[J]. 北京理工大學學報, 2018, 38(8):62-68.
[6] 高巍, 趙海, 羅桂蘭,等. 一種AAPF 算法及其在多機器人路徑規劃中的應用[J]. 東北大學學報(自然科學版), 2009, 30(5):644-647.
[7]?任恒樂,徐方,邸霈,田大吉.基于深度相機的移動機器人自主跟隨技術[J].計算機工程與設計,2020,41(2):562-566.
[8] Bakdi A, Abdelfetah H, Boutamai H, et al. Optimal path planning and execution for mobile robots using genetic algorithm and adaptive fuzzy-logic control[J]. Robotics and Autonomous Systems, 2017, 89(1): 95–109.
[9] Pandey A, Parhi D R. Optimum path planning of mobile robot in unknown static and dynamic environments using Fuzzy-Wind Driven Optimization algorithm[J]. Defence Technology, 2017, 13(1): 47-58.
[10] Pooya M, Sohrab K, Sehraneh G. A fuzzy multi-stage path-planning method for a robot in a dynamic environment with unknown moving obstacles[J]. Robotica, 2015, 33(9):17.
[11] 張嘉琦. 基于移動子目標的復合式路徑規劃算法[J]. 中國公路學報, 2017, 30(11):138-146.
[12] 王耀南, 潘琪, 陳彥杰. 改進型生物激勵神經網絡的路徑規劃方法[J]. 控制工程, 2018.
[13]?Song B, Wang Z, Zou L. On Global Smooth Path Planning for Mobile Robots using a Novel Multimodal Delayed PSO Algorithm[J]. Cognitive Computation, 2017, 9(1): 5-17.
[14]?卜新蘋, 蘇虎, 鄒偉,等. 基于復雜環境非均勻建模的蟻群路徑規劃[J]. 機器人, 2016, 38(3):276-284.
(收稿日期: 2019.09.09)
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
