欠驅動水面無人艇軌跡跟蹤的反步滑模控制
2020-04-21 07:40:59張昕
數字技術與應用 2020年1期
張昕


摘要:針對欠驅動水面無人艇軌跡跟蹤控制問題,本文從USV的數學建模入手,建立軌跡跟蹤誤差模型,將環境干擾作為固定值考慮進模型,結合Backstepping技術,Lyapunov非線性理論,通過引入動態滑模,設計了欠驅動水面無人艇軌跡跟蹤控制器,利用Lyapunov穩定性判據證明了該USV中所有的誤差變量和虛擬控制變量是收斂的。仿真試驗結果表明,在本文所設計的控制率作用下,USV的軌跡跟蹤效果顯著,達到預定控制目標,這為水面無人艇軌跡控制的實際應用提供了有效基礎。
關鍵詞:欠驅動無人艇;軌跡跟蹤;反步法;滑模控制;Lyapunov穩定性
中圖分類號:U616.3 文獻標識碼:A 文章編號:1007-9416(2020)01-0170-04
欠驅動無人艇;軌跡跟蹤;反步法;滑模控制;Lyapunov穩定性
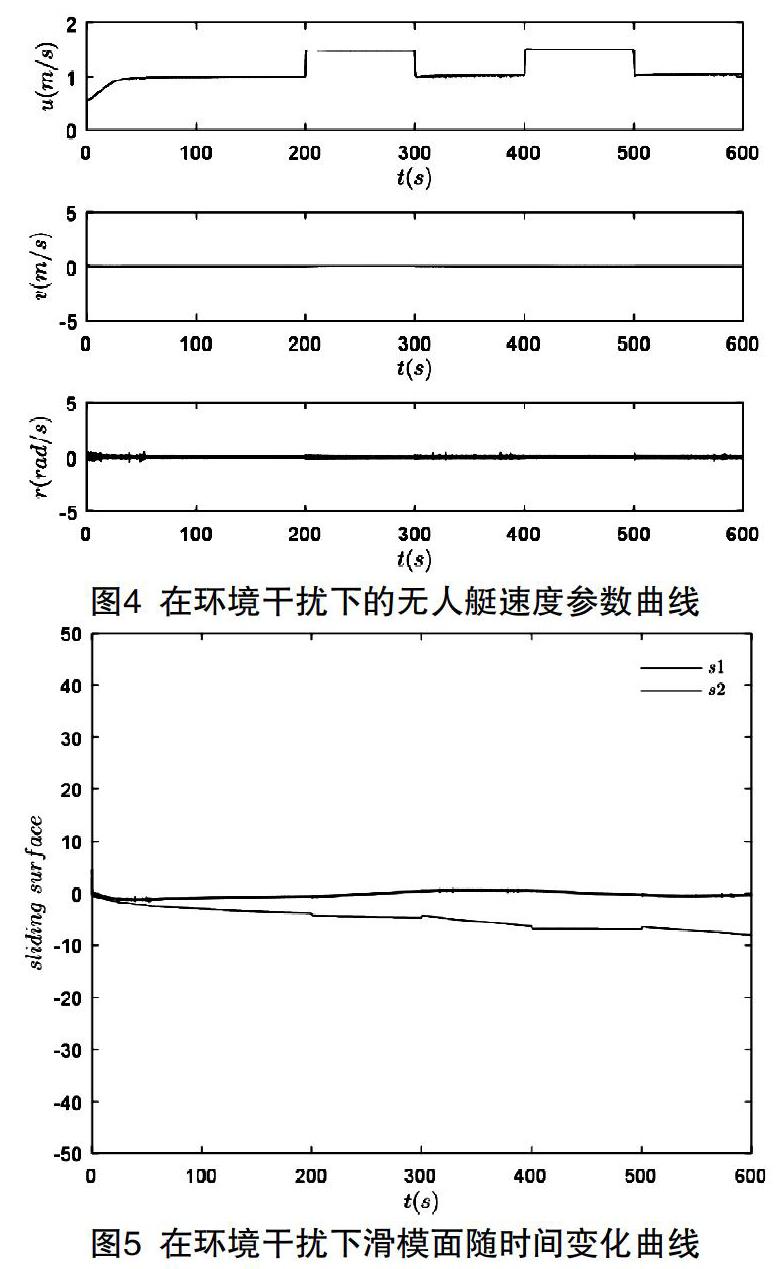
圖5為滑模面隨時間變化曲線曲線,可以看到隨跟蹤曲線變化,兩個滑模面也相應發生變化,且最終收斂到0點附近,誤差較小;
圖6為控制輸入曲線,可以觀察到縱向推進力與轉向力矩的變化點均與跟蹤路徑曲線變化時間點一一對應,符合實際情況,且兩個控制變量均收斂到0點附近,抖振較小,滿足實際工作要求。
5 結語
本文針對無人艇的軌跡跟蹤問題,首先介紹了欠驅動無人艇的非線性數學模型,在考慮了固定的環境干擾情況下,建立了航跡跟蹤誤差模型,結合Backstepping技術與Lyapunov非線性理論,引入動態滑模控制,設計了無人艇軌跡跟蹤的控制器,并證明了其穩定性。仿真結果表明,無人艇的軌跡跟蹤效果良好,這為水面無人艇軌跡跟蹤的實際應用,提供了有效的參考依據。
參考文獻
[1] 柳晨光,初秀民,吳青.USV發展現狀及展望[J].中國造船,2014(4):194-205.
[2] Wang Y L,Han Q L.Network-Based Fault Detection Filter and Controller Coordinated Design for Unmanned Surface Vehicles in Network Environments[J].IEEE Transactions on Industrial Informatics,2016(5):1753-1765.
[3] Ghommam J,Mnif F,Derbel N.Global stabilisation and tracking control of underactuated surface vessels[J].IET Control Theory & Applications,2010,4(1):71-89.
[4] Almeida J,Silvestre C,Pascoal A.Cooperative control of multiple surface vessels in the presence of ocean currents and parametric model uncertainty[J].International Journal of Robust & Nonlinear Control,2010,20(14):1549-1565.
[5] 俞建成,李強,張艾群.水下機器人的神經網絡自適應控制[J].控制理論與應用,2008,25(1):9-13.
[6] LIU Y,GUO C,SHEN Z P,et al. Stable adaptive neural network control of path following for underactuated ships[J].Control Theory & Applications,2010.
[7] 沈智鵬,代昌盛.欠驅動船舶路徑跟蹤的強化學習迭代滑模控制[J].哈爾濱工程大學學報,2017,38(5):697-704.
[8] 董早鵬,萬磊,廖煜雷.基于非對稱模型的欠驅動USV路徑跟蹤控制[J].中國造船,2016,v.57;No.217(01):122-132.
[9] GUO Q Z,XIAN K Z,Wei G.Concise robust adaptive path-following control for underactuated ships[J].Journal of Harbin Engineering University,2014.
[10] Bu R,Liu Z,He Q.Path following of underactuated surface ships with uncertain forward speed[C]// Control Conference.IEEE,2014.
[11] 徐瑞坤.CMGs驅動型水下航行器飽和跟蹤控制方法研究[D].武漢:華中科技大學船舶與海洋工程學院,2019:96-128.
[12] SUN Z,ZHANG G,QIAO L,et al.Robust adaptive trajectory tracking control of underactuated surface vessel in fields of marine practice[J].Journal of Marine Science and Technology,2018.
