一種水下聲學探測浮標的設計與實現
2020-04-20 14:02:28諶啟偉
數字海洋與水下攻防 2020年1期
關鍵詞:信號
諶啟偉
(中國船舶重工集團有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
近年來,日、美等國為了實現對第一島鏈附近海域的有效監控,防止中國海軍突破島鏈,建立起了一套復雜的水面、水下情報監測網。該情報監測網通過無纜的水聲網絡進行監測,探測重點是大陸的潛艇及各型水面艦艇的電磁特征和通信信號[1]。為了改變水下探測力量嚴重不對稱的現狀,需要大力發展對水聲通信網絡及其節點進行探測發現的便攜式裝備,在已有情報的指導下,對關鍵水道等重點區域進行篩查,找出敵水下探測網的具體布設位置,以便干擾、破壞其網絡,確保為我潛艇出航安全[2]。因此本文設計了一種基于國產北斗 Argo浮標,搭載水聲探測載荷的水下聲學探測浮標,能夠進行快速部署并有效監測水聲通信網絡布設及分布情況。
1 系統設計
水下聲學探測浮標主要由自沉浮浮標平臺、四陣元聲基陣、姿態及方位測量單元等組成,如圖1所示。浮標平臺用于搭載四陣元聲基陣、姿態及方位測量單元;四陣元聲基陣用于測量可疑目標相對于浮標平臺的方位和距離估算,并記錄水聲通信信號樣本信息;姿態及方位測量單元用于檢測浮標平臺的姿態和相對于地磁場的方向[3-4]。監控中心用于接收探測數據并顯示探測結果。
根據使用需求,浮標可以采用定深漂流探測和原位探測2種工作模式,對水下聲通信信號進行探測,記錄水聲通信信號樣本。探測到目標后,通過北斗衛星將相關探測信息數據發往監控中心。其典型工作模式如圖1所示。
圖1 探測浮標典型工作模式示意圖Fig.1 Schematic diagram of detection buoy in typical operation modes
浮標在水下設定深度漂流探測或原位探測,通過聲基陣探測水下聲通信信號頻帶。探測到水下聲通信信號后,立即啟動記錄聲通信信號樣本,并通過聲基陣對目標進行距離估算,計算目標相對于浮標的方位。浮標上安裝有姿態及方位測量單元,與聲基陣的相對位置固定,通過檢測到的浮標航向和水聲測量數據,浮標自動解算可疑目標的地磁方向。對目標進行距離估算并定向后,浮標上浮,上浮過程中保持探測狀態。上浮至水面后,浮標控制模塊將出水 GPS坐標發送給聲學信號處理器,同時發送詢問指令給聲學信號處理器,要求將聲學測量相關特征信息傳送給浮標的控制模塊。浮標控制模塊接收完相關聲學測量信息后,通過衛星將相關信息(包括當前浮標坐標、目標方位、相對估算距離、時間、信號持續時間、信號是否停止、探測信號中心頻率、信號頻帶寬度、平均聲壓級、信噪比)發往監控中心。衛星通信結束后,浮標接收監控中心指令,按照設定的工作模式繼續探測。若在設定工作時間周期內,浮標未探測到可疑聲通信信號,浮標上浮出水,發送心跳報文至監控中心后,下潛到一定深度漂流到下一探測區域,根據使用需求采用合適的工作模式繼續探測[5-6]。如圖2。
圖2 目標探測原理示意圖Fig.2 Schematic diagram of the target detection
2 自沉浮浮標平臺
浮標平臺主要由5個部分組成,包括:殼體模塊、浮力調節模塊、控制模塊、通信采集模塊、電源模塊。浮標平臺組成框圖如圖3所示。殼體模塊主要用來承受外部水壓,保證設備密封耐壓;浮力調節模塊主要用于調節浮標浮力;控制模塊用于控制液壓裝置、采集深度信息、控制浮標漂流深度、與聲基陣通信、系統電源管理;通信模塊用于北斗衛星通信定位;電源模塊用于系統供電。

圖3 浮標平臺結構示意圖Fig.3 Schematic diagram of structure of the buoy platform
3 聲學探測模塊設計
聲學探測模塊由四元聲基陣、放大濾波預處理電路、信號采集電路、信號處理單元和通信供電接口等組成,其組成框圖如圖4所示。聲基陣由4個水聽器組成,安裝在模塊底部。4個水聽器陣元處于一個水平面內,構成正方形陣。其余電子部分置于水密電子艙內,電子艙通過水密電纜與模塊主體相連,實現聲學探測模塊的供電及與平臺之間的數據通信[7]。
圖4 聲學探測模塊組成框圖Fig.4 Composition diagram of acoustic detection module
系統通過 4個十字正交的水聽器實現聲學信號到電信號的轉換,對接收到的信號進行放大濾波等預處理,通過數字采集電路完成模擬信號到數字信號的轉換,通過信號處理單元實現有用信號檢測、信號參數估計、目標方位估計及作用距離估算等,將信號檢測和參數估計等結果輸出給浮標平臺[8]。
1)信號檢測方法。
聲學探測模塊信號檢測技術采用傳統的能量檢測方法。由于待檢測的信號是主動聲吶信號或水聲通信信號,這2種信號的脈寬都比較長,時域的擴展引起頻域的聚集,因此本系統采用的是頻域能量檢測的方法。即先對信號進行頻譜計算,然后判斷工作頻段內是否存在過門限的幅度譜,存在即判斷為有信號,然后再對有用信號進行信號參數估計。由于系統的工作頻段比較寬,而在該頻段內海洋環境噪聲的幅度譜起伏比較大,特別是在低頻時起伏更大,如果是對全頻段內的噪聲信號進行檢測的話,則可能丟失高頻信號,因此不能用單一的門限在整個頻帶范圍內進行信號檢測。本系統采用倍頻程的頻帶劃分方法,將系統的整個工作頻帶劃分成若干個子頻帶,在每個子頻帶內分別進行門限計算并進行信號檢測。
2)信號參數估計方法。
由于是在頻域進行信號檢測,因此信號的中心頻率、帶寬、等效聲源級和信噪比均可結合信號檢測的過程進行估計。在每一幀當中,不進行信號脈寬計算,僅根據連續過門限的幀數和幀長度計算信號的脈寬。根據信號的帶寬進行信號來源判斷,當信號帶寬超過1.5 kHz時,即認為是通信信號。
3)目標方位估計方法。
設基陣的4個陣元構成的左手直角坐標系為基陣坐標系,其中1號和3號陣元在x軸上,2號和4號陣元在y軸上,陣的中心為坐標原點,陣元間距為D(指1、3陣元間距和2、4陣元間距),如圖5所示。設目標位于S處,其在基陣坐標系下的坐標為(x,y,z)。目標徑矢為OS,α為目標徑矢與x軸的夾角,β為目標徑矢與y軸的夾角,R為目標斜距。
圖5 目標方位估計原理示意圖Fig.5 Schematic diagram of the target bearing estimation
設S′為S在xoy平面上的投影,它與x軸的夾角θ為目標水平方位角,可得:

式中,a、β和R為測量值,測得這3個值即可按上式計算目標的方位參數。基陣的尺寸很小,在平面波近似下,有:
式中:c為水中聲速;τx為x軸兩陣元接收信號時延差;τy為y軸兩陣元接收信號時延差。將式(2)和式(3)代入式(1),得到:
式(4)為基陣坐標系下的目標方位估計公式。由此可見,要得到目標方位需要先測量信號到達兩兩陣元之間的時延差,目標方位估計精度取決于時延差估計誤差。根據基陣坐標系與“北東天”大地坐標系之間的方位姿態偏差角,通過坐標轉換可以獲得目標在大地坐標系下的方位。
4)時延差估計方法。
本系統的時延差估計方法采用廣義相關法,空間分離的2個水聽器接收到遠處聲源的輻射信號,可以用以下數學模型來描述:
式中:s(t)為聲源輻射的信號;n1(t)和n2(t)為互不相關的、平穩的高斯隨機過程;τ為兩路接收信號間的相對時延,簡稱為時延差。
時延差估計可歸結為是式(5)中τ的求取。由于n1(t)、n2(t)的存在以及處理過程中所引入的偏差,實際上只能得到τ的估計量。一種基本的估計方法是計算x1(t)和x2(t)的互相關函數:

由于s(t)和s(t-)τ是相關的,而背景噪聲n1(t)和n2(t)是不相關的(或相關性較小的),因此互相關處理后包絡峰值對應的τ就是時延差的估計量。為提高的估計精度,在互相關處理前還可以分別對x1(t)、x2(t)進行預濾波處理。
4 仿真及試驗結果
1)作用距離分析。
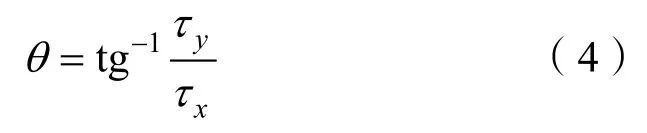
目標在不同距離處時水聲模塊接收機輸出端的信號電壓級和背景噪聲等效電壓級如圖6所示,其中細實線曲線代表接收機輸出端的信號電壓級(已經由接收到的聲壓級轉換為電壓級),粗實線代表接收機輸出端的背景噪聲電壓級。系統假設水聲通信信號聲源級為180 dB,由圖中結果可看出,在5 km處的接收信噪比約為12 dB。主動聲吶信號聲源級很高,通常超過 230 dB,系統將在更遠距離上(大于40 km)予以探測。本文仿真條件以水聲通信信號為輸入樣本,因此目標參數估計誤差分析均基于接收信噪比為12 dB。
圖6 作用距離預報曲線Fig.6 Forecast curve of operating distance
2)時延差估計誤差分析。
最優時延差估計的克拉美羅下限為
式中:B為信號帶寬,Hz;T為觀測時間,s;S/N為接收信噪比,dB。設定信號帶寬為5 kHz,觀測時間T為10 ms,接收信噪比為12dB,可求得時延差估計的克拉美羅下限為σ2≥ 5 .277× 1 012,則時延差估計誤差滿足 Δτ≥ 2 .3× 1 0-6s 。實際系統中,基于互相關峰值檢測的時延差估計誤差要大于克拉美羅下限。結合已有項目實踐經驗,取時延差估計誤差為5μs進行目標方位估計誤差分析。
3)目標方位估計誤差分析。

在不考慮聲速誤差和陣元間距誤差的情況下,整理上述式子得到目標方位估計誤差公式為

當 時 延 差 估 計 誤 差 Δτ= 5 μs, 聲 速c= 1 500m/s,θ=90°,β=45°時,若要滿足Δθ≤5°,則陣元間距需滿足:D≥ 0 .122m。考慮預留余量,本系統中的陣元間距取0.15 m。
圖7給出了方位角為40°情況下的目標方位多次仿真結果。具體的仿真參數為:信號為9~14 kHz的線性調頻信號,信噪比為12dB,C=1 480 m/s,D=0.15m。由圖中結果可看出,在上述的仿真條件下,目標方位估計誤差小于5°。
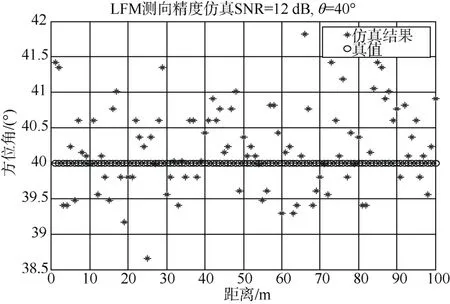
圖7 方位估計誤差仿真結果Fig.7 Simulation result of target bearing estimation
4)海上試驗。
為驗證浮標功能及指標的有效性,開展了相關的湖上及海上驗證試驗。試驗通過使用模擬信號源,模擬輸出多類型水聲通信信號,經功率放大器放大后輸出至換能器,使用船載移動聲源,浮標錨系上浮方式,測試不同方位、不同距離發射時,浮標觸發上浮報警的性能指標摸底,試驗設備關系如圖8所示。
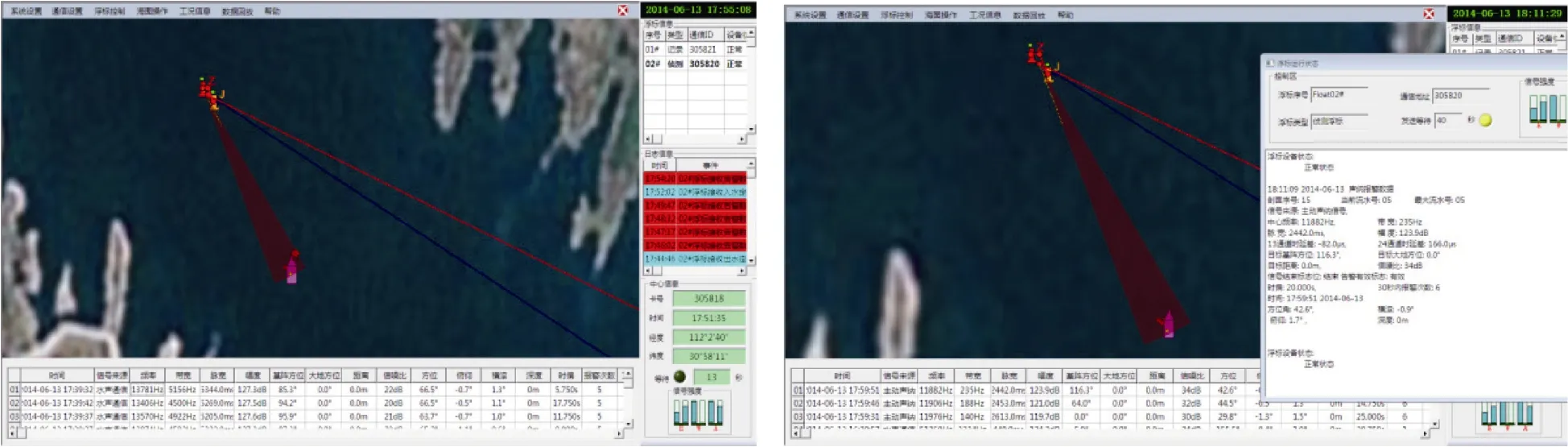
圖8 試驗結果Fig.8 Test result of the target detection
試驗表明,該浮標能夠準確探測到各類型水聲通信信號和主動聲吶信號,相關聲信號的特征值亦可獲取,并能夠初步測量目標方位,方位誤差不超過 5°。試驗中拉距測試過程,最大探測距離超過6 km。
5 結束語
本文介紹了一種水下聲學探測浮標的設計及實現,該浮標基于Argo浮標搭載水聲探測載荷,能夠在水中自主沉浮,并實現對水聲通信信號的探測,發現目標后能通過北斗衛星傳輸目標的相關特征信息。通過仿真試驗和湖試、海試,驗證了水聲測量模塊的測向功能和測向指標,以及浮標系統樣機全部功能要求。該浮標在探測距離、檢測概率指標上滿足或超過設計要求,可提供水聲通信網絡布設及分布情況,為我重要軍事行動提供決策依據。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
