基于神經網絡的真空斷路器狀態診斷
2020-04-18 06:17:56龐吉年王洪寅周福舉徐琛苑
科學技術創新 2020年6期
龐吉年 王洪寅 周福舉 花 俊 徐琛苑
(1、國網江蘇省電力有限公司宿遷供電分公司,江蘇 宿遷223800 2、南京寧匯智能科技有限公司,江蘇 南京210039 3、南京理工大學,江蘇 南京210094)
真空斷路器作為電力系統的開關以及保護設備,具有體積小、噪聲低、可靠性高等優點。在電力系統發生局部故障時,一旦發生由于斷路器故障而導致不能及時隔離局部故障,極有可能擴大停電范圍,造成嚴重的經濟損失。根據資料顯示,由斷路器控制回路和操動機構等方面的問題引起的機械故障,占全部故障的70%~80%[1]。所以,根據機械振動信號來判斷斷路器的機械故障,對于斷路器的狀態檢修具有重大的意義。
目前針對斷路器的故障診斷研究工作在國內外相繼展開,尤其是神經網絡越來越多被應用到高壓斷路器的故障診斷當中。例如深度神經網絡(DNN)[2]、BP 神經網絡[3]、徑向基函數網絡(RBF)[4]、自組織映射網絡(SOM)[5]等。而DNN 每次輸入都要對所有權值進行修正,全局用它可能無法滿足實時性要求[6];BP 神經網絡用于全局可能影響收斂速度,以及易陷于局部極小值[7];RBF 不能完全地識別出故障類型[8];SOM采用無監督學習規則,缺乏分類信息[9]。所以針對上述問題進行進一步的研究,提出了一種深度神經網絡與BP 神經網絡相結合的方案,能夠更準確可靠地對高壓斷路器的各類常見故障進行診斷。
首先通過小波包變換對采集到的斷路器振動信號進行處理,并引入能量熵的概念,利用小波包系數獲得信號在各個頻帶的能量分布,獲得每一種狀態下振動信號的特征向量[10]。然后通過獲得的特征向量訓練深度神經網絡,對故障狀態與正常狀態進行一次分類。再充分利用BP 神經網絡的非線性映射擬合的優勢,利用故障狀態的特征向量訓練BP 網絡,并把診斷過程獲得的新的特征向量當作已經學習過的BP 網絡的輸入,這樣BP 網絡會根據學習后所保存的非線性關系,將輸入BP 神經網絡的特征向量進行區分,最終輸出其所對應的真空斷路器狀態。
1 訓練樣本的構造
斷路器操動機構在斷路器進行開合的過程中起著十分重要的作用,許多斷路器的機械故障都與操動機構部分有關[11]。研究的真空斷路器采用彈簧作為動力的操動機構,其結構簡化模型如圖1 所示。
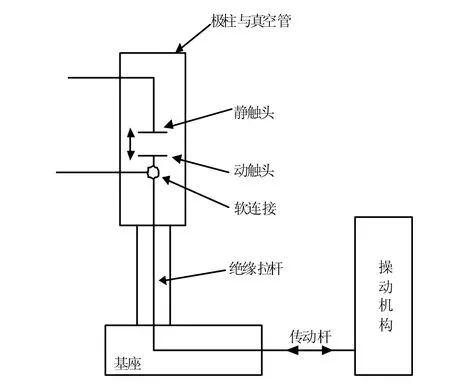
圖1 斷路器的結構簡化模型圖
1.1 振動信號采集
斷路器在分合閘的操作過程中,其操動機構伴隨著一系列的沖擊過程,通過在斷路器上安裝加速度傳感器可以采集到這個過程中產生的加速度波形信號。選擇IEPE 加速度傳感器的CA-YD-181 定制型,靈敏度為1mv/g,頻響范圍為5~10kHz,測量范圍為5000g。具體的采集流程如圖2 所示。
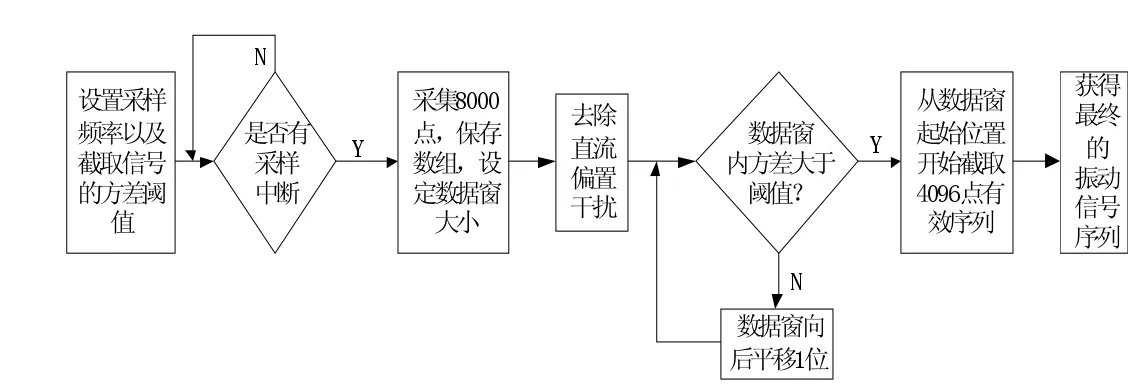
圖2 振動信號采集流程圖
1.2 振動信號處理
1.2.1 小波包變換
小波包變換技術是一種比小波變換更加精細的時頻分析方法,它能較好地表達振動信號的局部特征[12]。因此,采用小波包變換技術來提取采集到的真空斷路器振動信號的特征向量[13]。考慮到小波包的尺度數,直接選用了db4 小波。圖3 為選用Matlab 小波工具箱中的db4 小波對采集到的振動信號進行4 層分解后得到的示意圖。
1.2.2 利用能量熵獲取特征向量
真空斷路器產生的振動信號,在故障狀態相對于正常狀態的變化會反應到頻帶內信號的能量上,所以通過分析各頻率信號的能量變化可以發現一些故障信息[14]。信息熵能夠度量數據的復雜度,因而常被用來對小波包分解后的數據序列進行量化表達[15]。為了反應斷路器的機械狀態,將能量熵作為特征向量,并且建立以其為元素的樣本空間。
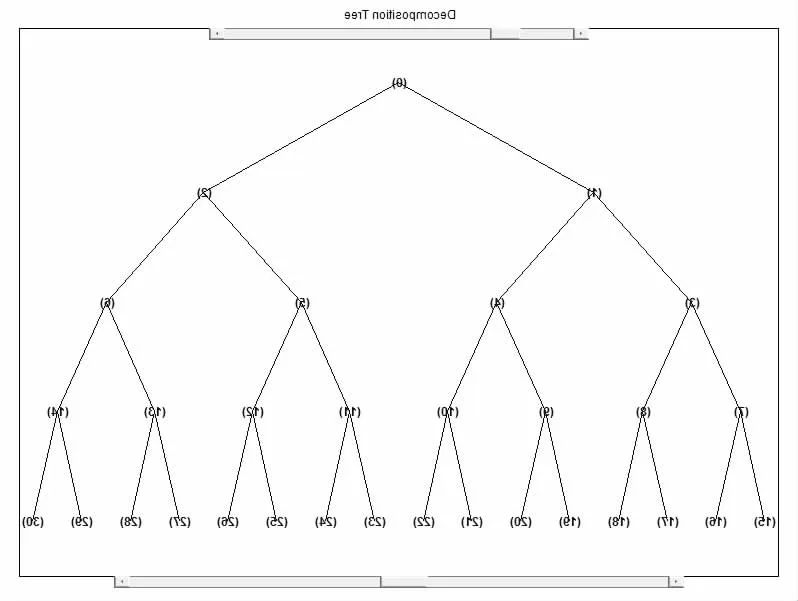
圖3 4 層分解示意圖
2 深度神經網絡故障識別
2.1 DNN 原理與基本結構
深度神經網絡(Deep Neural Networks, DNN)可以理解為有很多隱藏層的神經網絡,又被稱為深度前饋網絡(DFN),多層感知機(Multi-Layer perceptron, MLP)。基本的DNN 結構圖如圖4所示:

圖4 DNN 基本結構圖
按照不同層位置的劃分,DNN 內部的神經網絡層可以分為:輸入層、隱藏層和輸出層。
2.2 深度神經網絡模型搭建
要利用深度神經網絡(DNN)模型對正常狀態與故障狀態進行一次分類,計算步驟如下:
(1)定義網絡結構;
(2)初始化模型參數;
(3)循環計算:前向傳播/計算當前損失/反向傳播/權值更新。
3 BP 神經網絡故障類型診斷
3.1 BP 神經網絡結構與工作原理
BP 神經網絡又被稱為誤差反向傳播神經網絡[16]。如圖6 為一個標準的BP 網絡結構示意圖,其中包含了輸入層、隱含層以及輸出層。
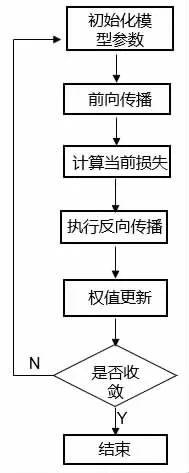
圖5 計算流程圖
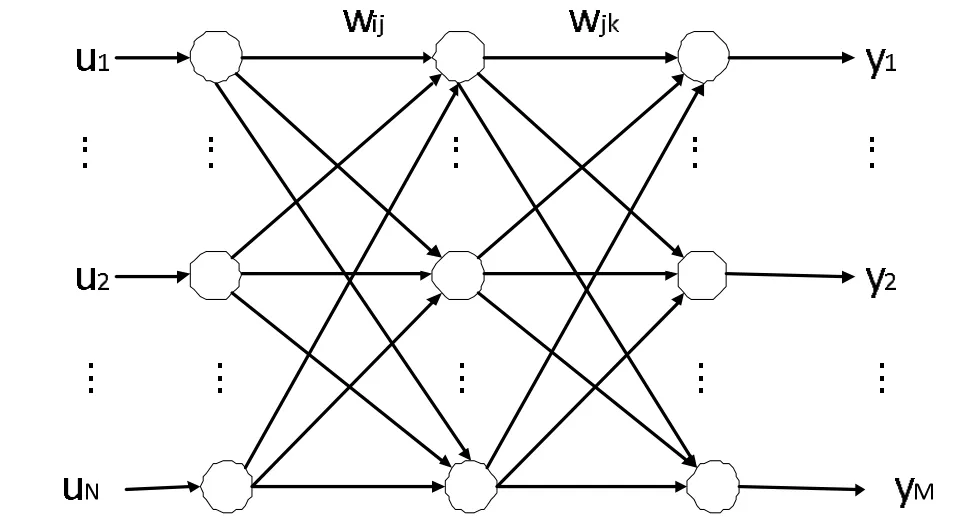
圖6 BP 神經網絡結構示意圖
3.2 算法實現
具體實現過程如下:
(1)輸入N 個學習樣本(Xk,Yk*),k=1,2,…,N;(2)構建BP 神經網絡結構;
(3)設置誤差限定值ε,最大迭代數Tmax,學習率η 以及沖量系數β,最開始的迭代次數t=1,訓練數據序列k=1;
(4)取第k 個學習樣本;
(5)由Xk進行信號正向傳播計算,依次計算每一個網絡層各個節點的輸入與輸出;
(6)算出BP 網絡輸出層各節點的誤差;
(7)如果對N 個訓練數據的任一數據序列K 值使得Ejk≤ε,j=1,2,…,m 或者t>Tmax,則訓練結束;
不滿足則將誤差按網絡進行反向傳播,通過這樣來對權值矩陣做修改;
(8)誤差反向傳播計算;
(9)k=k+1,t=t+1 跳轉步驟(4)。
4 MATLAB 軟件仿真與結果分析
4.1 采用深度神經網絡與BP 網絡結合的診斷方法的MATLAB 軟件仿真
選取斷路器各種狀態下的180 組特征相量,其中120 組用于訓練,其余60 組用于測試。對應的目標向量為一個二元向量,元素分別取值0 或者1,分別表示斷路器的兩種狀態,對應關系如表1。

表1 真空斷路器的狀態與目標向量對應關系
經過深度神經網絡訓練與測試以后,最終錯誤率在20%以內,滿足要求。
再選取經過深度神經網絡一次分類以后的故障狀態下的150 組特征向量,其中100 組用于訓練,50 組用于測試。對應的目標向量為一個五元向量,元素分別取值0 或者1,分別表示斷路器的5 種狀態,對應關系如表2。

表2 真空斷路器的狀態與目標向量對應關系
現取每種狀態下30 組特征向量的前20 組,共計100 組特征向量用于神經網絡的學習訓練。再利用訓練過的BP 神經網絡,對輸入數據進行模式識別,選取每種狀態下30 組特征向量的后10 組,共計50 組進行驗證。結果如圖7 所示,最終正確率為92.0%。

圖7 BP 神經網絡結果驗證圖
4.2 只采用BP 網絡診斷的MATLAB 軟件仿真
選取斷路器各個狀況下總計180 組數據,其中120 組用于用于測試。對應的目標向量為一個六元向量,元素分別取值0或者1,分別表示斷路器的6 種狀態,對應關系如表3。
同樣構建BP 神經網絡,并取每種狀態下30 組特征向量的前20 組,共計120 組特征向量用于神經網絡的學習訓練。再利用訓練過的BP 神經網絡,對輸入數據進行模式識別,選取每種狀態下30 組特征向量的后10 組,共計60 組進行驗證,得到的結果如混淆矩陣圖8,可以看到正確率為90.0%。

表3 真空斷路器的狀態與目標向量對應關系
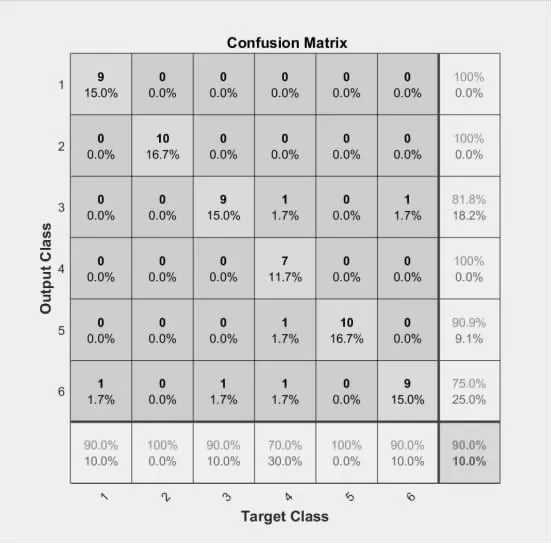
圖8 BP 神經網絡結果驗證圖
4.3 結果對比與分析
對比兩種方案的實驗結果,采用深度神經網絡進行一次分類的正確率達到了92%,高于直接使用BP 的90%。并且迭代次數只用BP 為200 次,多于深度神經網絡與BP 結合的次數61次,說明直接使用BP 的學習速率較慢。
直接使用BP 神經網絡可能存在以下問題:
(1)BP 算法為一種局部搜索的優化方法,因此算法很有可能陷入局部極值。
(2)從問題中選取典型樣本實例組成訓練集是一個相對困難的問題。
(3)難以解決應用問題的實例規模和網絡規模間的矛盾。
(4)網絡結構的選擇尚無一種統一而完整的理論指導,一般只能由經驗選定。
所以通過使用深度神經網絡與BP 神經網絡相結合的診斷方法可以彌補直接使用BP 進行識別存在的不足,達到更好的診斷效果。
5 結論
提出了一種深度神經網絡與BP 神經網絡相結合的真空斷路器故障診斷方法。通過加速度傳感器采集斷路器振動信號,采用小波包- 能量熵從振動信號中提取特征向量,再用特征相量訓練深度神經網絡對正常狀態與故障狀態一次分類,最后用BP 神經網絡對具體故障類型分類得出診斷結果。
結合具體算例進行了驗證,直接用BP 神經網絡對斷路器狀態進行診斷的正確率為90%,迭代次數為200 次;先用深度神經網絡一次分類再用BP 具體分類的正確率達到了92%,BP神經網絡迭代次數61 次。結果表明采用深度神經網絡與BP 神經網絡結合診斷的方法能夠更加快速準確地得到診斷結果。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
數學物理學報(2017年6期)2018-01-22 02:26:40
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50