基于局部異常因子算法的三維聲納單幀重建研究
2020-04-16 01:39:08曾騰張春華王朋
兵工學報 2020年3期
關鍵詞:方法
曾騰,張春華,王朋
(1.中國科學院 聲學研究所,北京 100190;2.中國科學院 先進水下信息技術重點實驗室,北京 100190;3.中國科學院大學,北京 100049)
0 引言
三維聲納能夠獲得三維空間信息,實現高分辨率的實時水聲探測,在海洋資源開發、海洋地形測繪和水體障礙物探測中有著廣泛應用,使得三維聲學圖像處理的研究變得尤為重要。另外,由于海洋環境的復雜性,聲納系統的性能受背景噪聲的限制[1],除環境噪聲外,聲速的非線性變化以及水池池壁的反射等因素[2],都會使三維成像聲納獲取的點云數據存在噪點,直接影響后期三維重建的準確性和效率。因此,在點云重建之前需要進行點云去噪,最大程度地保留目標的輪廓信息,去除圖像中的干擾信息。
光斑噪聲通常使用平滑有限沖激響應(FIR)濾波器處理,通過對鄰域像素點的加權線性組合修復當前像素點,雖然它有較好的去噪平滑效果,但是會導致圖像模糊,影響目標識別[3-4]。文獻[5]中采用馬爾可夫隨機場(MRF)模型,利用統計方法建模和反演技術進行去噪,但這種方式實現復雜。閾值法具有實現簡單、計算量小、性能較穩定、應用最廣泛的特點,能夠通過設定閾值區分目標回波與雜波,就噪聲降低和質量改進而言,在計算復雜性和性能之間有很好的折衷[6-7]。文獻[8]在快速目標檢測與追蹤背景下,采用雙閾值方法實現簡單有效的去噪,但是這種方式很難定義2個閾值的選擇標準。文獻[9]將閾值固定在最大像素值的22%,直接作用于波束信號,但閾值選擇過于單一,在去除大部分目標以外的噪點外,還會存在對目標輪廓造成干擾的異常點。
異常點(離群點)的定義最早由Hawkins[10]提出,異常點和數據集中的其他數據產生于不同機制,在數據特性上有很大差異。因此復雜背景和強雜波干擾下,背景和干擾帶來的非目標點被視為異常點,可通過目標點和干擾點的差異來進行區分[11-13]。目前異常點檢測主要用于數據挖掘領域,主要分為基于統計的方法、基于深度的方法、基于聚類的方法、基于密度的方法和基于距離的方法[14-15]。當數據分布密度相差較大時,基于密度的異常點檢測方法能得到更理想的結果[16-20]。局部異常因子(LOF)是一種基于密度的異常點檢測方法,其主要思想是基于每個點的密度及其鄰域點的密度決定該點是否為異常點。該方法簡單直觀,不需要對數據分布有過多的要求。
為了獲得易識別的目標重建結果,本文首先采用48×48個聲學換能器的平面接收陣(512個通道),發射單脈沖聲波信號進行128×128個波束形成,對獲取到的目標單幀數據依次進行三維波束成像、最大值濾波和坐標系轉換,進而得到原始點云,提出基于LOF算法的去噪方法對點云進行平滑,并利用一種改進的三角網生長方法進行單幀重建得到目標重建結果。
1 三維聲納點云模型
1.1 三維波束形成成像技術
假設接收平面陣的陣元數為M×N,陣元各向同性。方位角α與俯仰角β的定義示意圖[21]如圖1所示。
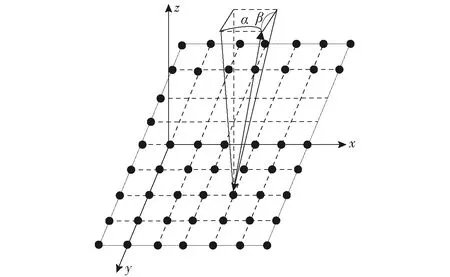
圖1 方位角及俯仰角定義示意圖Fig.1 Definition of azimuth and pitch angles
以遠場波束形成為背景,其波束形成表達式為
(1)
利用FFT實現三維成像聲納的波束形成,在遠場對接收信號的頻域信號進行空域二維FFT的結果為

(2)
式中:fα為方位角方向上的波數;fβ為俯仰角方向上的波數。
根據上述過程,接收面陣中每個單元接收到不同距離、不同方向上的回波疊加形成混合信號,對48×48個混合信號進行128×128個波束形成,從而得到一系列距離切片,如圖2所示,每個切片是128×128個點的反射強度信息集合。圖2中:I為數據點強度;i表示數據點在x軸方向上的波束位置;j表示數據點在y軸方向上的波束位置;根據距離采樣率,L表示數據點所在的層數,即數據點到接收陣的距離;O(x0、y0、z0)為視角原點。
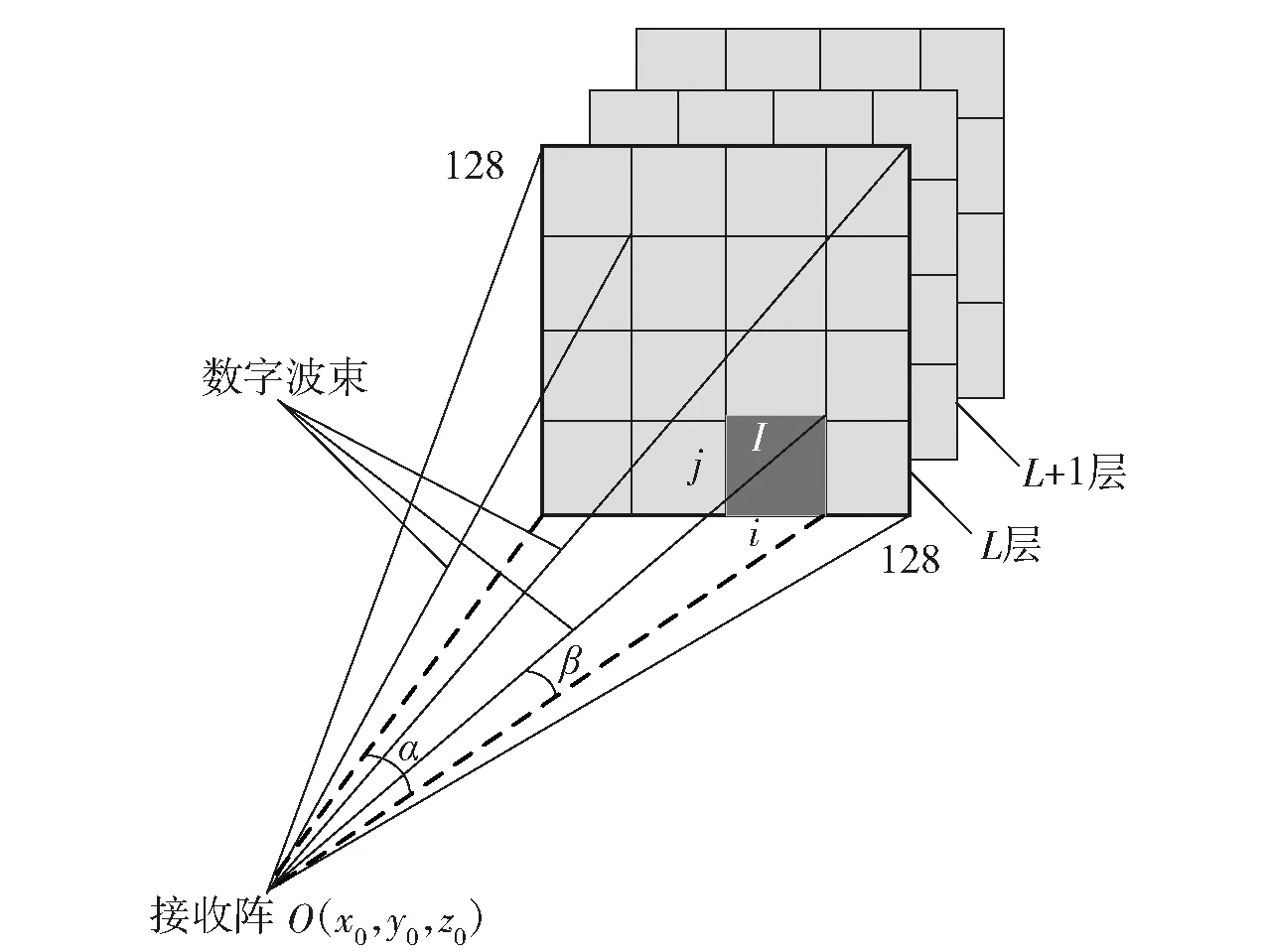
圖2 接收陣128×128個波束示意圖Fig.2 128×128 beams of receiving array
1.2 三維點云的獲取
對接收面陣接收到的聲學數據進行解析,聲學數據點格式可以表示為(i,j,L,I)。每幀信號得到包含128×128×2 048的體數據,其中距離切片數由聲納成像距離和距離分辨率決定。
由于原始數據的數據量過于龐大、干擾較多,不易獲取目標的真實輪廓,對后期的目標分割重建操作有著很大的影響。為了改善這種情況,對體數據進行最大值濾波,即在每一個波束方向的不同距離切片中找到強度最大的數據點位置和對應強度,從而得到128×128大小的目標位置和強度信息矩陣。然后進行坐標轉換,將數據點位置映射到三維坐標系下,數據點強度信息作為色彩信息,生成預期的點云數據。
李棟,山西太谷縣人,1969年出生,中國詩歌學會會員,山西省作協會員。1992年發起創辦太陽谷文學會。2010年起觸網寫詩,組詩偶見于《人民文學》《詩刊》《星星》等處。

(3)

2 算法描述
2.1 基于LOF去噪算法
為了解決閾值方法仍存在異常點的情況,本文針對三維成像聲納獲取的數據密度不均勻且維度較高的特性,在閾值去噪基礎上,采用一種基于密度的異常點檢測方法——LOF檢測算法。為了驗證該方法的效性,將聲納數據閾值去噪方法和該方法進行性能對比。
LOF算法的主要思想是通過對每個點p及其鄰域點的密度判斷該點是否為異常點,如果點p的密度越低,則點p是異常點的可能性越大。假設在經過閾值處理后的點云中取任意一點p,其第k距離dk(p)定義為
dk(p)=d(p,o),
(4)
式中:d(p,o)為點p與點o之間的距離。(4)式滿足:
1)在輸入點云中至少有不包括p在內的k個點o′∈C(x≠p),滿足d(p,o′)≤d(p,o);其中x為點集中的點,C(x≠P)為不包括點P的集合,o′為該集合中的某一點。
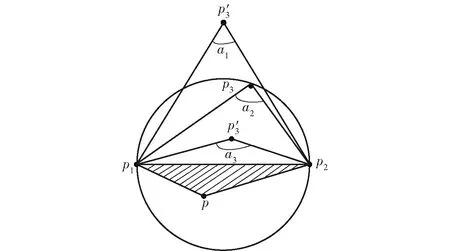
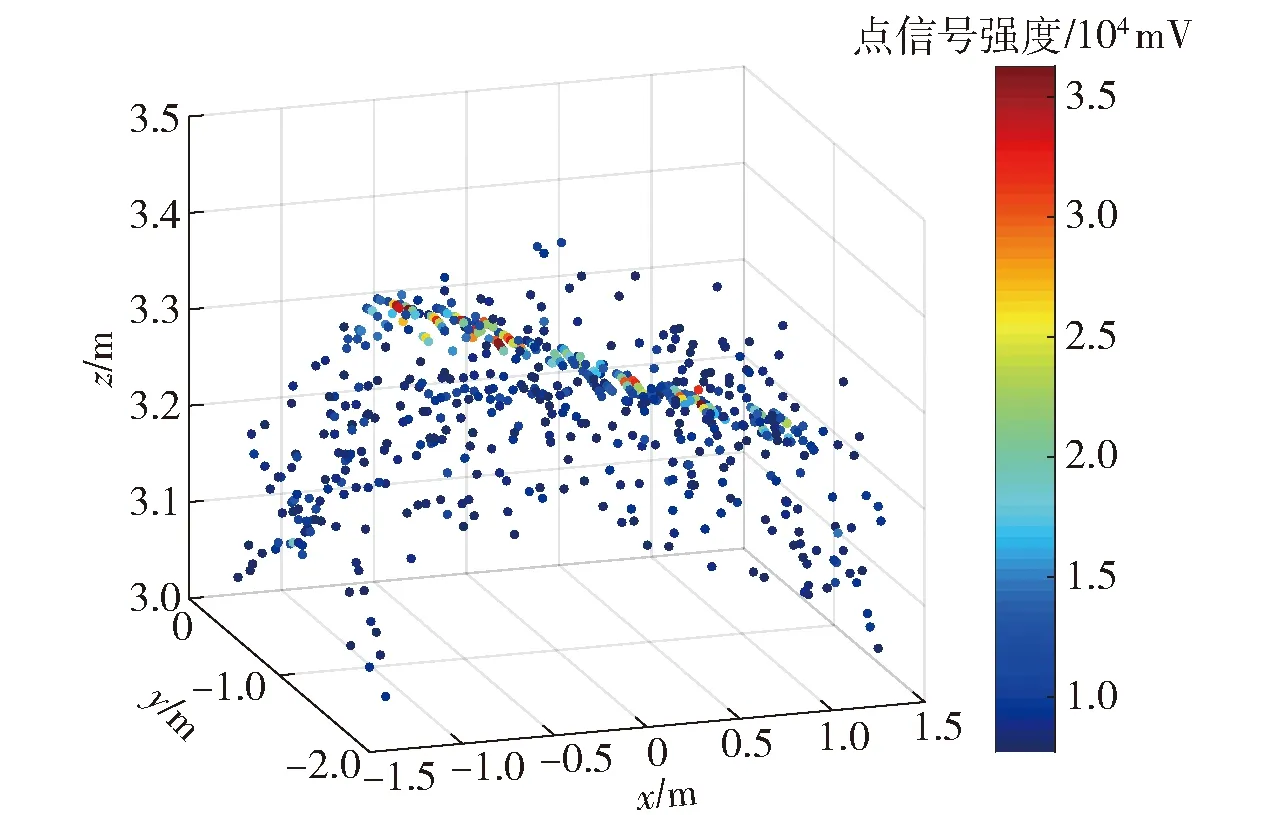
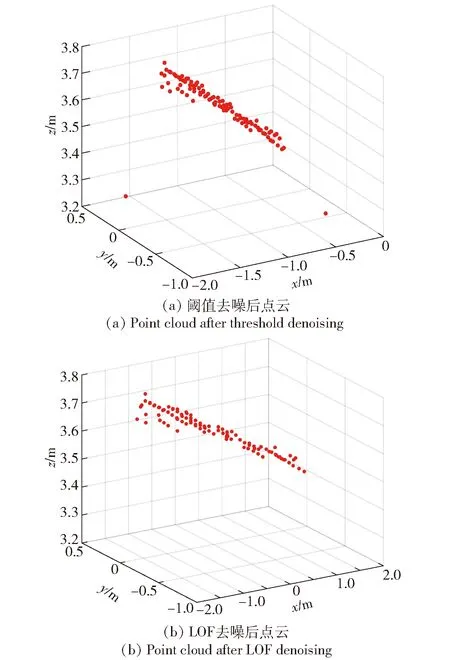
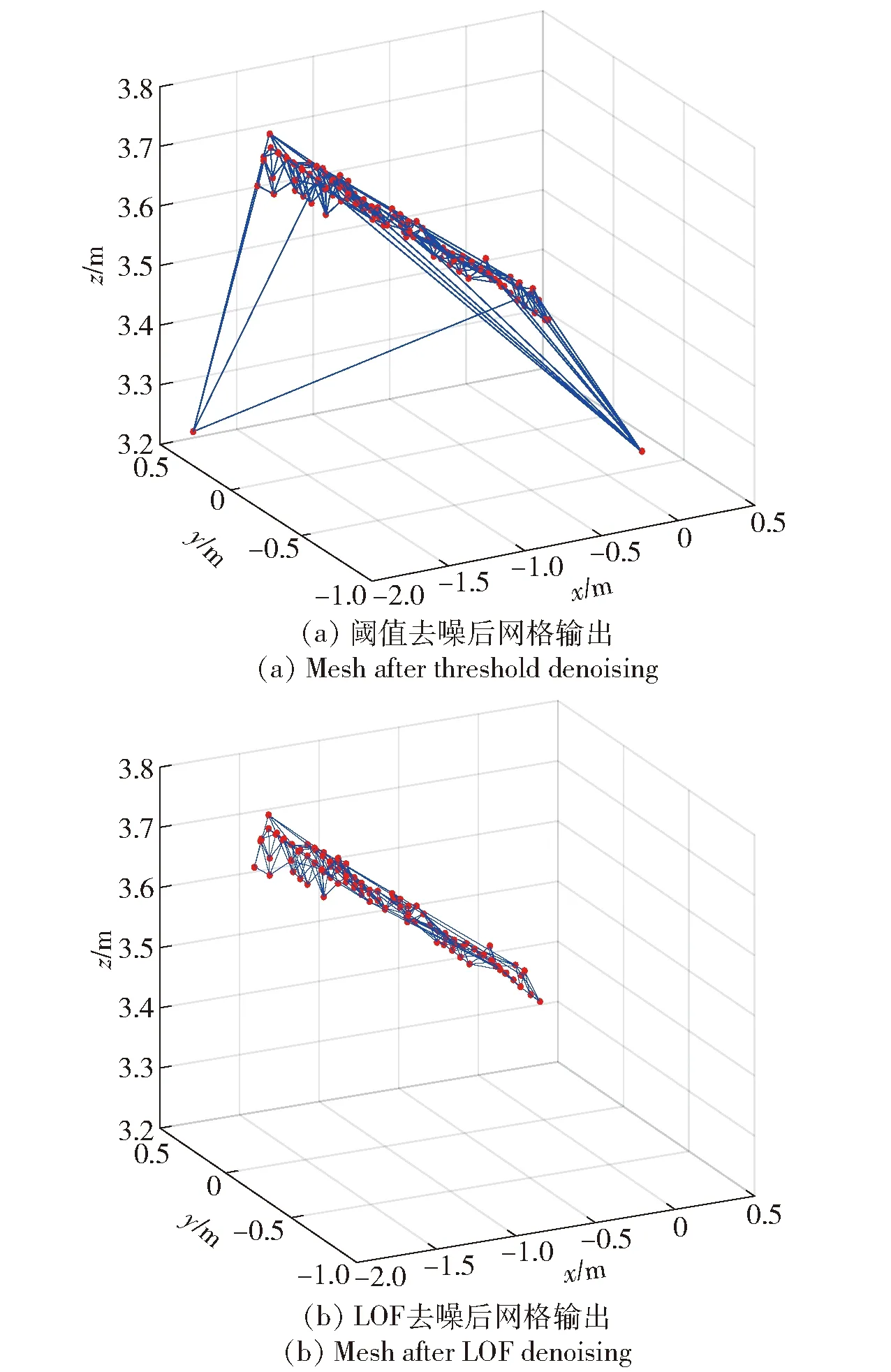
2)在集合中最多有不包括p在內的k-1個點o′∈C(x≠p),滿足d(p,o′) Nk(p)={q∈D{p}|d(p,q)≤dk(p)}, (5) 式中:Nk(p)為點p的第k距離鄰域;q為點p的鄰域點;D{p}表示除點p之外的點云集合。 點p到點o的第k可達距離為 dr(p,o)=max {dk(o),d(p,o)}. (6) (6)式意味著離點o最近的k個點,o到它們的可達距離相等且等于dk(o)。圖3所示為k=4的可達距離dr(p1,o)和dr(p2,o)的示意圖。 圖3 k=4的可達距離示意圖Fig.3 Schematic diagram of reach distance for k=4 根據上述定義,點p的局部可達密度表示為 (7) 通過點p的局部可達距離以及點o(點p的鄰域點)的局部可達距離作比,構造如下所示的比較因子,即局部離群因子,進而檢測異常點: (8) 該比值越接近1,表明點p的密度和其鄰域點密度相差不多,p可能與鄰域同屬一簇;該比值越小于1,表明p的密度高于其鄰域點密度,p為密集點;該比值越大于1,表明p的密度小于其鄰域點密度,p越可能是異常點。因此,觀察LOF值選取合適的值,保留取值范圍之內的點,即為異常點去除之后的目標點云。 1979年Brassel和Reif提出了三角網生長算法的主要思想,即首先找出點集中相距最短的兩點并連接成一條Delaunay邊,然后按Delaunay邊三角網的判別法則找出包含此邊的Delaunay三角形另一端點,依次處理新生成的邊,直至最終完成[22]。三角網生長法的改進實現多表現在搜尋“第三點”的策略上。為了簡化搜尋過程、降低算法復雜度,本文利用Delaunay三角網的空圓特性進行構網,即Delaunay三角網中任一三角形的外接圓范圍內不會有其他點存在。 圖4所示為點p1、p2和第3點p3組成的外接圓。從圖4中可以看出,位于外接圓內部的p3對應的三角形內角角度大于外接圓上p3對應的三角形內角角度α2.通過觀察不同點對應的三角形內角角度α1、α2和α3,若要實現外接圓內無其他點,則第3點對應的角度最大。 圖4 外接圓與第三點關系示意圖Fig.4 Relationship between circumcircle and the third point 另外,為了降低擴展三角網搜尋第3點的計算量,在以已有三角形的邊為基準擴展時,只搜尋邊一側的點集,將此作為第3點備選點,即第3點與該邊相對的點關于該邊異側。由圖4可以看出,△p1pp2為已有三角形,以邊為基準擴展,新生成的第3點p3與點p關于邊對稱。首先需要對第三邊進行直線方程求解,假設p1坐標為(x1,y1,z1)、p2坐標為(x2,y2,z2),根據直線Ax+By+C=0的一般式方程,代入兩點坐標求出系數: (9) 之后基于直線方程尋找滿足條件的第3點,假設點p坐標為(x,y,z),第3點p3坐標為(x3,y3,z3),第3點和點p關于已求得的直線滿足異側準則,即: (Ax3+By3+C)(Ax+By+C)<0. (10) 為了檢測算法的實用性,對鐵管目標進行水池實驗。實驗場景環境參數如下:聲納系統入水深度2.0 m,目標與聲納系統的距離為3.4 m,聲納系統距離消聲壁約5.3 m,聲納接收陣面與水面基本垂直,如圖5所示。目標實物為金屬圓管,長度為2.05 m,直徑約3.0 cm,帶有一定彎度,周身用白布條包裹,兩端有螺絲紋,如圖6所示。 實驗利用48×48陣元數目的平面陣對水池數據進行采集。接收陣形成128×128波束,在0~50 m探測范圍內形成2 048個距離切片。對鐵管目標數據進行處理,鐵管的原始數據經過坐標轉換得到的目標點云如圖7所示。由圖7可以看出,由于海洋環境的干擾,很難辨別出目標的輪廓。 圖7 水池中鐵管三維坐標系點云Fig.7 Point cloud in Cartesian coordinates of iron tube 對點云分別使用閾值去噪方法和LOF去噪方法,得到結果如圖8所示。從圖8(a)中可以看出,閾值去噪后已經能看出鐵管的基本輪廓,但是仍會有一些離群點,容易對后續的構網結果造成偏差,模糊目標邊界。而圖8(b)中LOF去噪方法設定閾值去除大于1.2的點后,異常點數目相比圖8(a)中減少為0,不存在模糊目標輪廓的干擾點,只保留了目標本身的點,使得目標輪廓能很好地體現。 圖8 水池中鐵管去噪后點云Fig.8 Point cloud after denoising of iron tube 對兩種去除干擾點后的方法分別進行改進的三角網生長法建網,得到圖9所示的結果。由圖9可見,閾值去噪方法由于離群點的影響,網格中會出現不需要的三角形,使得鐵管的邊界被嚴重混淆。LOF方法相比而言有很好的效果。 圖9 水池鐵管構網結果Fig.9 Triangulation result of iron tube 本文通過實驗數據分析,發現基于LOF算法的去噪方式相比于傳統閾值去噪方式,能夠在保持目標真實輪廓的前提下有效剔除異常噪點,得到更貼合實際的目標輪廓。另外,三維數據可視化的實時性要求低復雜度的算法實現,本文所提出的改進三角網方法大大簡化了構網過程。然而LOF的閾值設定需要觀察后手動設定,在將來可以考慮自適應地選取適合不同目標的閾值。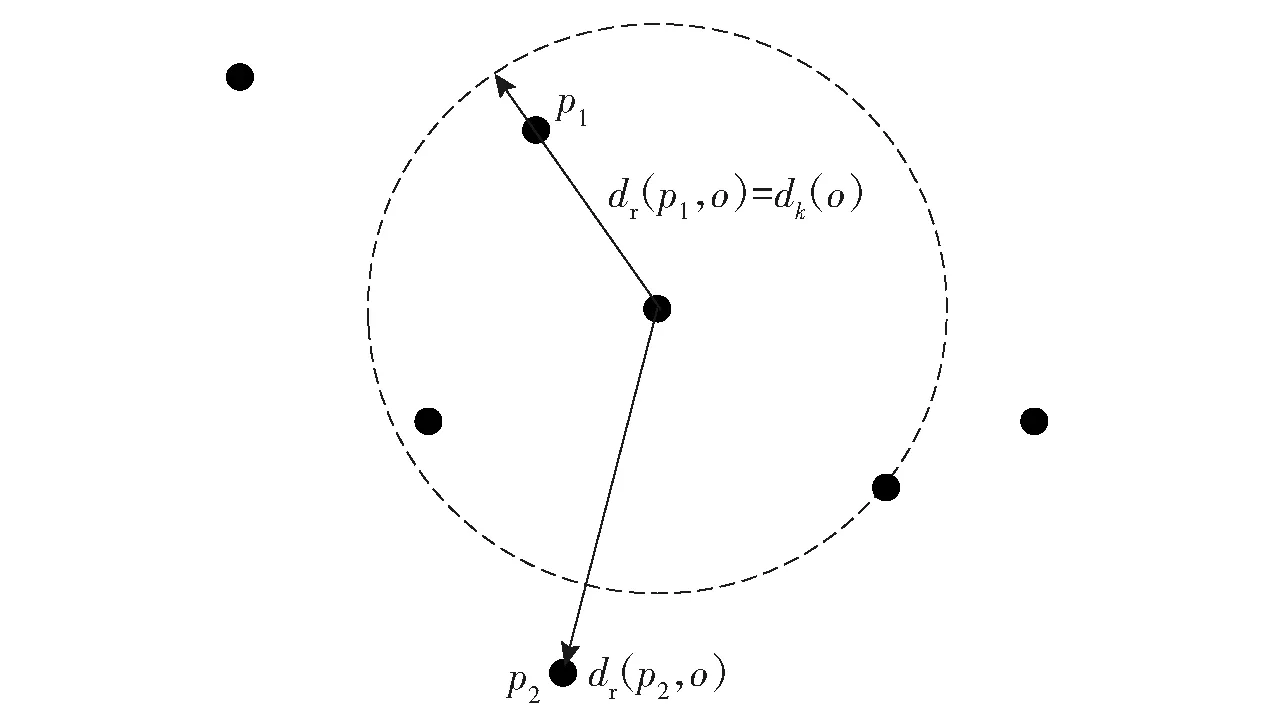
2.2 改進的三角網生長重建算法
3 實驗結果及分析
4 結論
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
