一種基于無人機視頻影像的車流量統計算法
2020-04-13 06:38:54張冬梅盧小平張航余振寶苗沛基
遙感信息 2020年1期
張冬梅,盧小平,張航,余振寶,苗沛基
(河南理工大學 自然資源部礦山時空信息與生態修復重點實驗室,河南 焦作 454000)
0 引言
為緩解城市交通擁堵狀況,對不同路段和不同時段的車流量監測并進行統計分析,已成為城市智能交通的重要技術手段[1]。現有的車流量實時統計方法主要有:①基于環形線圈傳感器方法,該方法可靠性強、準確率高,但在安裝和維修方面花費巨大且容易造成道路堵塞。②將微波傳感器、雷達傳感器、紅外線傳感器或超聲波傳感器的檢測系統懸掛在道路一側或正上方,通過發射和回收波形計算車流量。③基于監控視頻提取車流量方法[2-3]。
隨著我國“天眼”工程建設的持續推進,基于監控視頻影像的車流量統計方法因其布設范圍廣、數據來源廣、復現性好、處理精度高等優點,已被廣泛應用于城市智能交通建設中[4]。基于視頻的車流量統計方法主要有虛擬檢測線法、虛擬線圈法、目標跟蹤法等算法。虛擬檢測線法和虛擬線圈法基于圖像像素值的變化來統計車流量,目標跟蹤法通過特征匹配來統計車流量。王衛鋒等[5]采用虛擬檢測線法,將檢測線放置于檢測道路中心且與道路方向垂直,該算法取得了較好的效果,但統計精度較低。張虹波等[6]采用虛擬線圈法,該算法在虛擬檢測線法的基礎上進行改進并取得了很好的效果,檢測的實時性和可操作性有所提高,但車輛在行駛過程中變道或設置的虛擬線圈位置不變,會產生漏檢從而導致統計精度降低。夏永祥等[7-8]采用目標跟蹤法統計車流量,該算法抗干擾性能較好,可利用車輛自身的照明特性計算夜間的車流量,實現全天候車流量檢測,但該算法較復雜。針對上述問題,本文提出一種基于無人機視頻影像的車流量統計雙虛擬檢測線法,該方法使用無人機獲取道路某一時間段的視頻影像,將獲得的視頻幀圖像進行預處理并進行背景建模與更新,運用改進的多幀平均法進行初始背景估計,獲到不含運動目標的背景模型,通過背景差分法檢測運動目標并使用混合高斯背景模型法進行背景更新。最后進行車輛統計,在視頻幀的中下方設置雙虛擬檢測線,通過計算雙虛擬檢測線內的各連通區域的面積及長寬比進行車流量統計。實驗證明,該算法精度較高,魯棒性較強,為突發交通事件提供可靠的車流量統計方法。
1 本文方法
本文提出一種基于無人機視頻影像的車流量統計雙虛擬檢測線法,是將無人機采集到的監控視頻影像數據進行預處理,進行背景建模與更新,然后采用雙虛擬檢測線法計算某段道路上特定時間的車流量。
1.1 圖像預處理
由于受周圍環境和采集設備性能的影響,得到的圖像存在噪聲,導致圖像質量下降[9-10]。本文采用均值濾波的方法去除噪聲,其數學表達式為:
(1)
式中:h(x,y)是經過濾波后輸出的圖像像素值;k為鄰域個數;f(x,y)為該點的像素。均值濾波是典型的線性空間濾波,該算法運算速度快,同時還能保留邊緣信息的優點。
1.2 背景建模與更新
1)初始背景估計。對于行駛在道路上的車輛,很難獲得其靜止的背景圖像,必須對獲得的視頻幀進行預處理才能得到靜止的背景圖像。運用多幀平均法提取初始背景的表達式為:
(2)
式中:B(x,y)為初始背景模型;fi(x,y)為第i幀圖像像素值;N為前N幀圖像。N值越大,提取的初始背景效果越好,多幀平均法求初始背景具有計算簡單,易于實現等優點。但在實際提取的時候,由于光照、車流量等因素,往往會在背景圖像中留有陰影且如果N值過大提取時間將會較長。因此本文采用一種改進的多幀平均法提取初始背景,通過求前N幀圖像與初始背景圖像像素值之差,選出n幀差值小于閾值T的視頻幀并對選出的n幀圖像求平均值b(x,y),然后利用標準差求出陰影,最終求出不含陰影的背景模型。具體表達式如下:

(3)
式中:gj(x,y)為前N幀圖像與初始背景模型差小于閾值的視頻幀像素。
(4)
式中:b(x,y)為選出的n幀平均像素值。
(5)
式中:K(x,y)為初始背景中陰影部分。
P(x,y)=|b(x,y)-k(x,y)|
(6)
式中:P(x,y)為最終不含陰影的背景圖像。
2) 運動目標檢測。運動目標檢測的核心是將背景與目標進行分離并獲得想要的目標區域[11]。常用的目標檢測方法有:光流法[12-14]、幀差法[15-17]、背景差分法[18-20]。
光流法檢測運動目標不需要提前獲得背景信息,但因其算法復雜、計算量大、抗噪性差,很難提取速度較慢的運動物體。幀差法是通過相鄰視頻幀實行相減運算,得到差分圖像,但由于相鄰視頻幀之間的時間間隔較短,檢測到的運動目標會出現許多空洞。本文采用背景差分法檢測前景目標,此方法是利用當前幀與改進后的背景圖像之間的差值進行檢測,當前幀與背景圖像相差較大的區域即為前景目標,該方法實現方便,可快速分離前景目標。計算公式如下:
d(x,y)=|fi(x,y)-P(x,y)|
(7)
式中:d(x,y)表示差分像素值;fi(x,y)為第i幀的視頻幀像素值;P(x,y)為最終不含陰影的背景圖像。

(8)
式中:D(x,y)為運動目標像素值;T是二值化閾值。
3) 背景更新。由于光照、噪聲等原因,道路背景不斷變化,因此必須對初始背景進行更新。本文采用混合高斯背景模型法進行背景更新,該算法首先對視頻序列圖像中每個像素點建立K個高斯分布,同時使用所建立的K個高斯分布的加權來描述視頻中的場景[9]。通過像素點與高斯模型是否匹配區分背景點與前景點。像素點的概率定義為:
(9)

1.3 雙虛擬檢測線法
智能交通系統中交通流量統計的實時要求非常高,因此交通車流量統計算法通常基于感興趣區域的檢測和分析[21]。基于雙虛擬檢測線的車流量統計法,首先確定雙虛擬檢測線的位置即感興趣區域,一般設置在視頻幀的中下方,以調節感興趣區域內前景目標的像素間距從而分隔開車輛,緩解車輛斷裂的影響。當有車輛經過雙虛擬檢測線時,利用邊緣跟蹤技術獲取雙虛擬檢測線內連通區域邊緣的定位并標記,采用四連通法計算當前幀連通區域的個數并逐個計算連通區域的面積和長寬比。設置前景目標的面積閾值R和長寬比閾值r并根據閾值選擇前景目標并計數。為避免重復計數,引入狀態變量flag,當有前景目標經過雙虛擬檢測線時,狀態變量flag=1;當沒有前景目標經過雙虛擬檢測線時,狀態變量flag=0。
設置感興趣區域時,雙虛擬檢測線的位置和寬度對檢測精度有一定的影響。雙虛擬線的位置一般設置在離攝像頭較近的地方以防止出現粘連現象,檢測線的寬度一般為最小車長的2/3左右。在當前幀計算連通區域的個數并逐個計算連通區域的面積和長寬比,公式如下:

(10)

(11)
∑flag=SUM
(12)
式中:e,f和p,q分別為連通區域g(x,y,i)在x,y軸的坐標;sum和m分別為連通區域的面積和長寬比;R和r為閾值;SUM為當前幀車輛數。
本文的車流量統計算法步驟如下:
①視頻幀影像二值化后,當有車輛經過雙虛擬檢測線,利用邊緣跟蹤技術獲取雙虛擬檢測線內連通區域邊緣的定位并用長方形標記出來,長方形各邊的坐標為距離連通區域最近的像素值,通過計算長方形各邊的邊長獲得連通區域的面積和長寬比。
②設置狀態變量flag=0,將得到的連通區域的面積和長寬與設置的閾值進行比較,當sum>R且m>r時,則狀態變量flag=1,認為有車輛經過雙虛擬檢測線,否則狀態變量flag=0,認為沒有車輛經過雙虛擬檢測線。然后flag 重置為0,逐個計算并分析當前幀剩余通區域的面積及長寬比。
③設置SUM初始值為0,在當前幀累加狀態變量flag,計算當前幀車輛數并將當前幀車輛數與前一幀車輛數比較。若當前幀車輛數大于前一幀中車輛數時,則將當前幀與前一幀車輛數之差累加到總數量上,若當前幀車輛數小于或等于前一幀車輛數時,不進行累加,繼續下一幀的計算,SUM重置為0。
本文算法引進了目標車輛大小的狀態變量并結合雙虛擬檢測線內連通區域的變化情況來統計車流量。該算法可同時檢測多車道的車輛,避免車輛在兩車道之間行駛時出現漏檢現象,且運算量小、實時性好、魯棒性強。
2 實驗與結果分析
2.1 實驗過程與結果
實驗采用大疆PHANTOM 4 PRO無人機作為道路監控視頻源,選取某城市主干道車流量較大的一段作為研究區,時間為16點。首先使用無人機獲取監控影像并對每一幀圖像進行濾波處理,處理結果如圖1所示。之后對實驗數據進行初始背景估計,處理結果如圖2所示,使用改進的多幀平均法獲得的初始背景可消除陰影,提高精度。最后設置雙虛擬檢測線并將視頻幀二值化進行車輛統計,本實驗視頻幀高度為240,分別在160與200像素處設置雙虛擬檢測線并累計統計車流量,結果如圖3所示。
圖1 中值濾波前后對比圖

圖2 初始背景的比較

圖3 車輛統計
2.2 實驗結果分析
選擇合適的視頻幀速度和閾值,確保車輛在雙虛擬檢測線線內僅出現一次。實驗中視頻長度為35 s,視頻幀速度為30幀/s,實際車輛為9輛,使用本文算法得到的結果為8輛,正確率為89%。利用連通區域分析對車輛進行統計,當有車輛通過時,連通區域的面積增加,同時會出現一個峰值,每個峰值代表一個車輛。如圖4所示,視頻幀中共有10個峰值,但有2個峰值在最低點附近,小于實驗中設置的閾值,不被計入總數之中。分析出現誤檢的主要原因如下:①車輛顏色分布不均勻,進行二值化時,造成亮度分布不均,進而導致提取的前景目標不完整,造成一輛車可能同時出現幾個外接距長方形,從而造成程序的誤檢。②車輛目標由遠及近駛向攝像頭,前景目標在視頻流中的位置發生改變,所提取的連通區域的面積由小變大,不同大小的車輛面積變化趨勢不一樣,所設置的雙虛擬檢測線的位置可能不能適應于所有的車輛,從而造成誤檢。
為驗證算法的有效性,在該主干道分別采集了高峰期和非高峰期兩時間段的視頻影像數據,每個時間段分別采集5組數據,每組數據的視頻幀長度為10 min,使用本文算法與虛擬線圈法比較,結果如表1和表2所示。
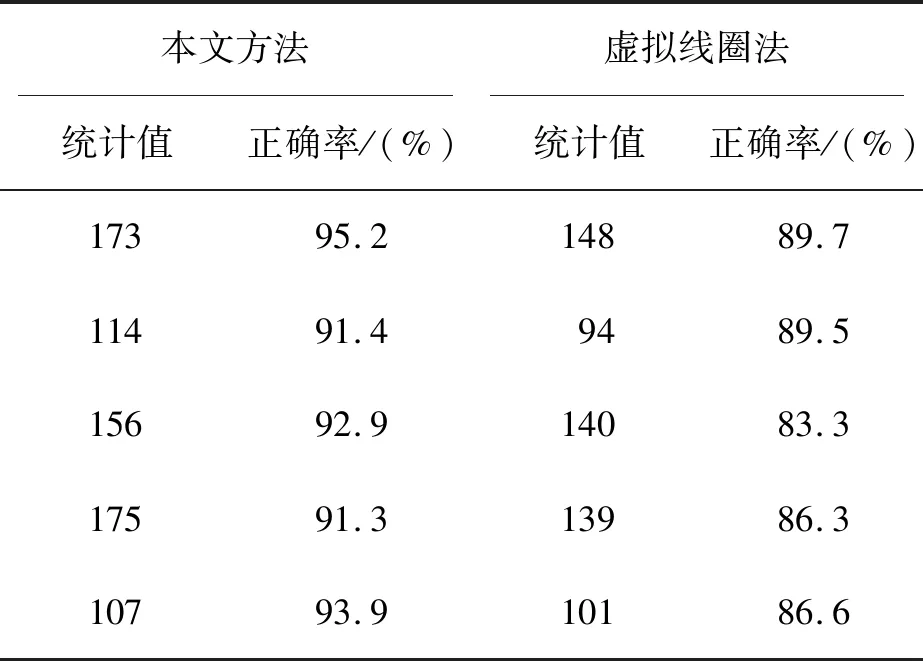
表1 非高峰期時段車流量統計結果

表2 高峰期時段車流量統計結果
從上述表中可以看出,本次實驗在非高峰期時間段采用雙虛擬線檢測線法統計結果平均正確率為92.94%,虛擬線圈法為87.08%,本文算法比虛擬線圈法提高了5.86%。高峰期時間段采用雙虛擬檢測線法統計結果平均正確率為91.62%,虛擬線圈法為84.42%,本文算法比虛擬線圈法提高了7.0%。因此本文算法優于虛擬線圈法,具有一定的實用性,本文提出的車流量算法能避免因跨車道行駛而出現的漏檢現象且可以排除檢測區域內的非車輛前景目標。
3 結束語
本文針對車流量的統計問題,提出了一種基于無人機視頻影像的車流量統計雙虛擬檢測線算法,同時采用改進的多幀平均法消除初始背景陰影來提高精度,并在MATLAB R2014a平臺上得以實現。經過多次實驗驗證,說明本文所實現的算法能在初始背景精度較高的情況下進行準確率較高的車流量統計。
猜你喜歡
汽車工程師(2021年12期)2022-01-17 02:29:54
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
當代陜西(2020年14期)2021-01-08 09:30:42
奧秘(創新大賽)(2020年7期)2020-07-27 08:26:32
貴州師范學院學報(2016年4期)2016-12-01 03:54:07
紡織服裝流行趨勢展望(2016年1期)2016-05-04 03:45:20
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
