先進微控制器在Austro Engine E4系列航空發動機ECU模塊中的應用
2020-04-12 03:05:51王銀坤楊淳
航空維修與工程 2020年11期
王銀坤 楊淳
摘要:基于現代微處理器技術基礎,對Austro Engine E4系列發動機面向控制應用的微控制器在ECU上的架構進行分析和闡述,有助于了解ECU模塊基本工作原理和相關信息,高效率排除發動機控制系統故障,為通航飛機維修技術和理念的升級提供一定幫助。
關鍵詞:ECU;微控制器;Austro Engine E4
Keywords:ECU;microcontroller;Austro Engine E4
0 引言
隨著電子技術的發展及大型專業開發平臺的應用,航空發動機電子控制技術已進入相當成熟階段,航空發動機輸出性能、經濟性、可靠性、排放指標、維護性等指標得到全面提升。目前國內飛行訓練主力機型之一的鉆石DA42NG飛機所裝配的Austro Engine E4系列發動機就以其先進的發動機電子控制技術著稱。
Austro Engine E4系列航空發動機主要裝配在鉆石DA40、DA42NG等機型上,該型發動機作為現代高速柴油飛機發動機的代表之一,采用ECU作為發動機主控制器,該控制模式與傳統的萊康明發動機顯著不同,對EUC控制模塊工作的研究就顯得尤為必要。
作為Austro Engine E4動力裝置的控制核心,ECU完成兩個層次的基本控制功能。第一個層次是發動機輸出功率控制,控制對象為Mercedes-Benz OM640本體。以Bosch公司第二代高壓燃油共軌系統為硬件基礎。第二個層次是對發動機負載進行控制,控制對象為MT螺旋槳槳葉角變化。根據Austro Engine提供的Set Point,ECU通過調速器改變螺旋槳槳葉角,實現發動機負荷控制策略。而ECU能實現上述控制功能的關鍵就在于其內部的微控制器(見圖1)。
1 ECU基本工作原理分析
作為發動機電子控制系統的核心部件,ECU的基本任務可歸納如下:
1)處理輸入信息,將各類輸入的信息轉化為微處理器(或微控制器)所能接受的信號;
2)存儲輸入信息,供微處理器在適當的時刻使用;
3)存儲各種程序、數據、表格等;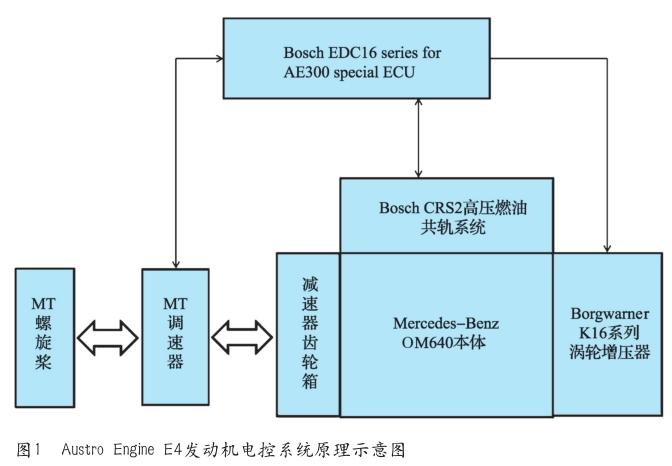
4)完成計算任務、執行處理各種信息的運算,進而產生控制指令及進行故障診斷;
5)存儲輸出信息;
6)處理已鎖存的輸出信息,分別執行數據、信息的通信與交換;
7)產生各種參考電壓,如3.3V、5V、9V及12V等。
以MPC56xx系列32位單片機為代表的先進微控制器極大提升了ECU運算力、控制精度、可靠性、擴展和升級能力、網絡和數據交換能力,使發動機先進設計理念得以實現,依據現代微電子技術、SoC(System-on-a-Chip系統級芯片)基本原理、ARM架構研究以及芯片廠家技術說明等,ECU基本工作原理可歸納為如圖2所示的ECU底層控制邏輯硬件架構。
2 ECU的輸入級部分分析
輸入部分的作用是將發動機電控系統各傳感器檢測到的信息通過I/O接口送入微控制器,實現ECU對發動機運行工況的實時檢測與監控。同時,原始信號進入輸入級后,還需進行預整理,如雜波濾除、偏移補償等。有的信號為非矩形波,不能直接參與微控制器運算,需執行標準方波信號處理。
從傳感器來的信號分為模擬信號與數字信號兩種,由于計算機只能識別數字量,故模擬電信號必須通過A/D轉換才能進入ECU微控制器。一些脈沖信號也不能被計算機直接接收,需要通過輸入級將狀態信號轉變為標準TTL信號才能送入微處理器。由此,ECU輸入級的特點如下:
1)對被檢測部件的信號拾取要求真實反映被測對象工作狀態,包括及時性、測量精度符合行業規范、測量信號需滿足專用嵌入式設備輸入接口的電平標準規范要求,因此,根據行業設計經驗,都會在輸入級通道中設計與傳感器類型相關的信號調制、轉換電路。
2)由于輸入通道模塊要完成被測對象真實狀態的量值(傳感器輸出的電流、電壓、頻率量)檢測,因此,在針對航空領域的設計方案中,除了要求將輸入通道模塊盡可能接近信號拾取對象以減少傳輸過程的能耗和干擾,還要求ECU必須設置在遠離熱源和振動的地方。近年來,傳感器生產廠家開始規模化生產被稱為“Smart Sensor”的新型傳感器,該類傳感器可對信號進行線性化處理和放大,輸出標準規范數字信號、頻率信號和TTL信號,可以減輕ECU輸入級的負擔,提升抗干擾能力。
3)維修人員必須考慮到被測對象的現場環境對輸入通道的影響。一般情況下,模擬通道傳輸線路上的輸出信號強度都比較微弱,因此,對于運行維修方來說,維持輸入通道線路的抗干擾設計狀態顯得特別重要。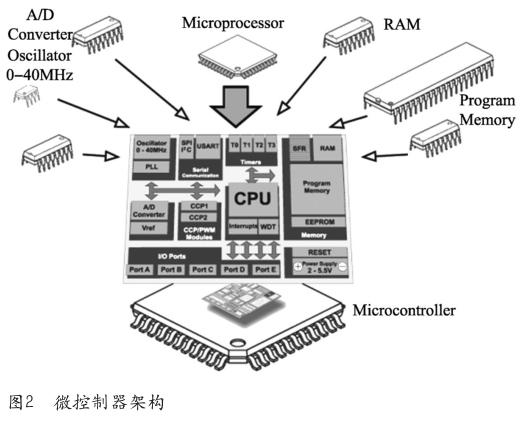
4)在ECU輸入通道模塊中,信號調節的基本任務是將壓力、溫度、電場、磁場等敏感元件輸出的初次信號轉換成能符合微控制器或A/D輸入規范要求的標準電平信號。作為ECU的測量子系統,其信號調節任務較復雜,除了執行信號放大和濾波外,還要完成諸如零點漂移校正、線性化處理、溫度補償、量程切換等信號處理運算。作為微控制器應用領域的ECU,諸多原本依靠硬件實現的信號調節任務都可交由更先進的軟件來完成,使ECU中信號處理電路得以簡化。這樣,可將ECU輸入通道模塊的信號處理重心轉變為小信號放大、信號濾波以及頻率量的放大、整形等任務上,優化了ECU性能。
3 ECU中的微控制器部分分析
ECU中的微控制器被認為是發動機電控系統“核心中的核心”,承擔整個ECU的信號獲取和處理、MAP數據運算和狀態分析、控制指令的生成和鎖存、控制策略執行、ECU內部及外部數據的通信與交換等任務。
以高可靠性為追求目標的E4系列發動機對ECU中微控制器芯片的要求是:運算速度高、實時控制、抗強振和高溫,在電磁輻射、粉塵、油污環境下具有高可靠性和耐久性。
1)實時處理能力:嚴格遵守某一時間順序“及時”“立即”地完成各種數據處理及控制指令的產生。以Austro Engine E4系列發動機為例,由于燃油噴油過程的控制必須精確地確定噴油時刻和噴油持續期,ECU設定了嚴格的時間參數,由ECU微控制器中的實時時鐘提供。微控制器對信息的處理采用分時串行方式,全部收集到的信息不可能做到“立即”,因此就不能做到完全“實時”。這里所說的實時性可理解為在時間上能跟得上過程所提出的任務要求,因此就有了硬件上實時響應運算速度方面的要求,即微處理器應在規定的時間內完成所有信息的采集、處理及指令輸出工作,為下一個任務的執行做好準備,必須滿足硬件方面對微控制器工作頻率的要求。
2)比較完善的中斷系統:作為一個能實現正常功能的微控制器系統,必須能及時處理系統中發生的各種緊急情況和優先排序任務。例如,系統運行時通常需要某些基本參數、改變某個工作流程或指引某一規定時間間隔內的任務流程,當I/O子系統異常、系統偵測出故障或緊急情況發生時要做出相應的報警和處理。作為典型的SoC應用,ECU微控制器芯片在處理這些情況時一般都采用中斷控制方式。系統出現緊急情況需要處理時,向微控制器發出中斷請求,系統根據預置程序暫停原工作進程,執行相應的中斷服務程序,待中斷處理完畢后微控制器再返回原程序流程。此外,在微控制器系統中還有本機與外部設備信息交換、與飛機其他系統的多機連接、與其他計算機通信等實際需求,這些都需要用中斷方式進行解決。
3)對微控制器指令系統的要求:與其他SoC一樣,微控制器也應用執行效率更高的RISC(精簡指令集)系統,其指令種類的多少及功能的強弱將影響編程繁簡,進而影響本機解決復雜問題的能力。因此,要求ECU軟件開發人員注重指令的豐富性和尋址范圍的廣泛性。
4)對內存的要求:作為微型計算機,ECU模塊將常用算法和數據存放在內存中,適量的內存容量是微控制器穩定運行和效率的保障,同時ECU模塊對內存也有嚴格的保護功能,使其控制過程穩定、不出故障,保證內存中的控制程序及數據在控制過程中不被偶然錯誤所改變和破壞。
與PC機的X86架構不同,基于控制功能的發動機ECU都采用單片微型機結構,這種哈佛(Harvard)架構的微處理器是將中央處理器、程序存儲器、數據(MAP)存儲器、定時器/計數器以及I/O接口電路等主要部件集成在一塊電路芯片上所形成的ARM架構芯片級應用,也被稱為單片微型計算機或單片機。作為ECU的微控制器應用不管是功能上還是形態上,都是為適應控制領域應用要求而設計的,如早期的80C51、M68HC11、M68HC332等8位單片機,以及更先進的MPC56xx系列32位單片機,都著力擴展了A/D、PWM、PCA、OC、高速I/O、WDT等功能,因此將它們稱為微控制器(Microcontroller)更為準確。
4 典型的ECU單片機基本組成結構
1)CPU:ECU的主控微控制器芯片專門應用于強化“面向控制”的處理功能,如位元處理、MAP查讀、多重跳轉、乘積運算、狀態監控、中斷式任務處理等功能,以增強其實時性和專屬性。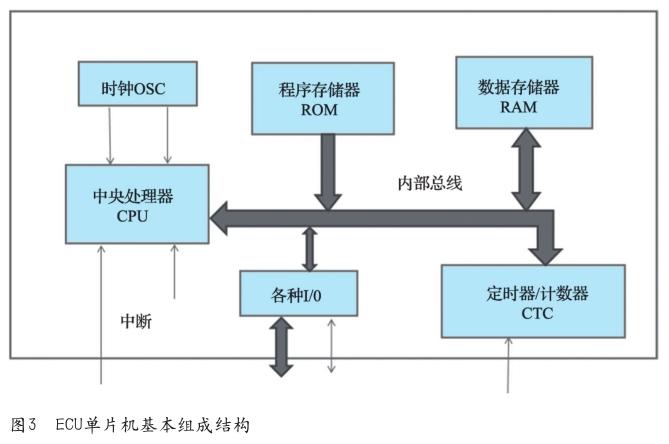
2)存儲器:考慮到ECU單片機“專屬性”的實際應用場合,需要較大的程序存儲器空間,因此采用了哈佛布局。將電控系統的控制程序、各種控制參數的脈譜圖表(MAP)、發動機的參數等信息保存在片內掩膜存儲器中。
3)I/O接口:I/O接口是ECU微控制器CPU與傳感器和執行機構之間實施信息交換的橋接控制電路模塊。依據CPU的指令,輸入信號以確定頻率通過I/O模塊,被CPU緩存器鎖存,調出執行運算,輸出信號則按所發出控制信號的要求通過I/O模塊,以合適的速度輸出(或送入中間存儲器)。因此,I/O接口是外界與CPU進行信息交換的紐帶和橋梁,具有數據緩存、電平切換、時序匹配處理等多種功能。
4)定時器/計數器:在微控制器的實際應用中,需要精確定時或對外部事件進行計數,為減少軟件的開銷和提高微控制器的實時擴展能力,均在微控制器內部設置了定時器/計數器電路,通過中斷實現定時/計數的自動處理。
5)定時電路及元件:微控制器的整個工作過程是在時鐘信號的驅動下按嚴格的時序,有規律地一個節拍、一個節拍地執行各種操作。各種計算機均有各自的固定時序和定時電路。同樣,ECU的微控制器芯片內部也設計了定時電路,只需要外接晶振單元即可實現各功能模塊的倍頻功能。新型微控制器的振蕩元件已集成在芯片內部,不僅大大縮小了ECU體積,也便于開發應用。
5 ECU的輸出級部分分析
與所有SoC相同,發動機ECU的輸出級被分為模擬量通道的輸出和數字量通道的輸出。模擬量通道的輸出是將微控制器芯片輸出的數字控制信號轉換為模擬控制信號(電壓和電流)去驅動對應的執行機構,從而實現對被控制對象的精確高效控制。例如,要控制在電控化發動機上大量使用的比例型電磁鐵(如流量控制器)、大功率動圈式力馬達(如螺旋槳調速器分油塞彈簧預張力調節電機),就必須先將微控制器輸出的數字信號轉換為模擬信號,即電壓,此電壓信號經功放后才可驅動執行機構。數字量通道輸出是將微控制器輸出的數字信號經鎖存隔離后再經功放器輸出,控制只接受數字信號輸入類型的執行機構,如高速電磁開關、步進電機等。
1)模擬量輸出通道:由數/模轉換器模塊完成D/A轉換,根據航空領域的特殊應用場合,要求高精度和高可靠性,并具有優秀保持功能。模擬量通道輸出的結構形式分為獨立D/A轉換器形式和共用D/A轉換器形式。在ECU的開發階段,Bosch公司已著重考慮了D/A轉換芯片的優化匹配、數字量碼的輸入極限、模擬量的極性輸出錯誤概率、參考電壓多路源優化、模擬電量輸出在極端環境的調整與分配等問題。
2)開關量的輸出通道:開關量輸出通道與微控制器接口可采用片載自帶鎖存功能的I/O口;采用通用集成可編程I/O接口芯片,只需改變程序內容就可達到改變芯片功能的目的。
3)功率放大器:微控制器輸出的控制信號經過輸出通道的處理后,信號能量還不足以驅動各種執行機構,一般還要經過功率放大器將信號能量放大。根據負載特性、使用場合、精度、響應等,歸納出以下幾種類型的功率放大器:
a.電壓反饋型功放,應用于直流伺服電動機的轉速控制;
b.電流反饋型功放,針對動圈式和動鐵式電-機械感性負載要求具有很小的電氣時間常數的特點,確保輸出電流信號的保真度;
c.比例電磁鐵的功放,應用于驅動電流需求較大、穩態和動態特性良好的場合,如脈寬調制(PWM)式信號的功率放大器,用于驅動渦輪增壓器旁通門控制閥等,優點是功耗不高、控制精度高、響應快;
d.開關式功率放大器,應用于高速電磁開關閥(數字閥)、步進馬達等數字式執行元件的驅動功放,特點是能耗低,與微控制器芯片連接方便,能消除摩擦影響和顫振信號,如電磁式高壓燃油噴嘴就采用了帶升壓驅動模塊的PWM開關式功放,可以提供理想的線圈電流上升波形,保證電磁閥關閉始點的一致性,降低了噴油定時誤差。
6 總結
本文基于現代微處理器技術基礎,對Austro Engine E4系列航空發動機面向控制應用的微控制器在ECU上的架構進行了分析和闡述,通過相對通俗的描述,可以使維修人員對ECU控制系統的基本原理和功能有個整體的概念和理解,為通航維修人員維修理念的轉變提供一定幫助,為發動機控制系統故障的排除提供一定的理論基礎和參考。
參考文獻
[1] 林學東.發動機原理 [M].2版.北京:機械工業出版社.2014.
[2] 呂彩琴.汽車發動機電控技術[M].北京:國防工業出版社.2016.
[3] 王尚勇,楊青.柴油機電子控制技術 [M].北京.機械工業出版社.2006.
[4] Daniel J. Holt. The Diesel Engine[Z].
[5] Klaus Mollenhauer, Helmut Tsch?ke. Handbook of Diesel Engines [Z].
[6] Austro Engine Maintenance Training Manual For E4 series [Z]. Issue:4.9 January 2016.
作者簡介
王銀坤,工程師,主要從事通用航空器工程技術管理工作。