基于CLIPS的智能無人飛艇故障診斷專家系統開發
2020-04-09 04:48:53郭忠毅龍飛樊慧津劉磊王永驥
計算技術與自動化 2020年1期
郭忠毅 龍飛 樊慧津 劉磊 王永驥
摘? ?要:針對智能無人飛艇的故障診斷問題,設計開發了一套基于CLIPS框架的故障診斷專家系統。首先,根據診斷專家的知識進行故障分類并建立故障樹;其次,基于CLIPS工具設計了智能無人飛艇的故障事實庫和規則庫。然后采用靜態鏈接的方式將CLIPS框架嵌入到C++中,并設計了"路由跳轉"功能,實現了用戶輸入與CLIPS的數據交換接口,并利用MFC框架開發了相應人機交互界面。該智能無人飛艇故障診斷專家系統的開發,改善了現階段人工故障診斷的不規范及效率低下等問題,為智能無人飛艇的故障診斷、分析和排除提供了平臺和支持技術。
關鍵詞:智能無人飛艇;CLIPS;故障診斷專家系統
中圖分類號:TP319? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A
Fault Diagnosis Expert System Development
for Intelligent Unmanned Airship Based on CLIPS
GUO Zhong-yi1,LONG Fei2,FAN Hui-jin1?覮,LIU Lei1,WANG Yong-ji1
(1. School of Automation,Huazhong University of Science and Technology,Wuhan,Hubei 430070,China;
2. China Special Vehicle Reach Institute,Jingmen,Hubei 448035,China)
Abstract:For the intelligent unmanned airships,a fault diagnosis expert system based on CLIPS is designed and developed. Firstly,based on the knowledge of the diagnostic expert,the faults are classified,and the fault tree has been established according to the causal relationship. Secondly,the fact base and rule base are respectively designed with the CLIPS framework,and a forward reasoning control strategy is employed. CLIPS is embedded in the C++ environment by static linking mode. In addition,the "route jump" function is designed to realize the data exchange interface between user input and CLIPS. Finally,the human-computer interaction interface is developed with the MFC framework. The development of the fault diagnosis expert system has improved the irregularity and inefficiency of manual fault diagnosis,and provides a platform and support technology for thefault diagnosis,analysis and elimination of intelligent unmanned airships.
Key words:intelligent unmanned airship;CLIPS;fault diagnosis expert system
智能無人飛艇屬于浮空飛行器的一種,相較于飛機等其他航空器,其最大優勢是能耗低、制造成本低廉,同時具有留空時間長,污染小,起降場地要求靈活方便等諸多優勢,因此廣泛應用于監測、運輸、通訊、勘探等方面[1]。在智能無人飛艇實際飛行中,由于外界環境或電子、機械等內部原因的影響,某些部件元件或系統的運行特性或參數與其正常飛行的額定值出現了較大的偏差,或其軟件控制系統可能出現一些不可預見性的故障,導致無人飛艇系統的性能嚴重低于正常水平,難以完成操作無人飛艇正常的控制任務[2]。例如一個較為突出的問題就是在飛艇低速飛行時,會產生氣動力不足的現象,進而降低舵面的控制效果,導致舵面故障[3]。當類似舵面這種操縱機構故障時,會導致控制指令錯誤,從而影響飛艇的動態過程,造成嚴重后果,威脅人身安全。因此,必須在無人飛艇發生故障時,及時根據飛艇的運行參數和故障現象進行分析,快速準確的診斷出飛艇的故障原因和部位,為后續智能飛艇的容錯控制提供準確信息,避免造成更加嚴重的后果。
近年來故障診斷的研究已經取得了一定的研究成果[4-6]。針對無人機及運載火箭等航空器故障,文獻[4]以運七飛機起落架為實例,利用了面向對象的技術建立系統模型,分別針對飛機的發動機,液壓系統等關鍵系統開發了故障診斷專家系統。然而,該系統所采用的面向對象方法不擅長邏輯推理,其規則比產生式規則更復雜。此外,無人飛艇在工作原理和外形結構特點上與上述航空器也存在較大差別,且針對無人飛艇的問題,目前研究較少。文獻[5]針對無人飛艇的壓力氣囊故障進行了研究,利用故障樹分析法對其故障原因進行了定性分析。該文所給出的故障樹分析法可應用于本智能無人飛艇的知識整理和分析上,但由于缺少智能化的知識保存和積累功能,因此無法推廣,具有一定的局限性。
現階段無人飛艇的故障診斷主要依靠人工檢驗、簡單儀器儀表測量等方式進行。而這些嘗試性的故障診斷方式往往存在操作流程不規范,診斷效率低下等問題。同時,培養專業的無人飛艇故障診斷人員周期較長,需要長期的經驗積累。因此,設計一個基于專家系統的無人飛艇故障診斷系統來幫助普通操作人員快速實現飛艇故障診斷是十分有必要的。
因此,在已有的研究基礎上,依托體積約100立方米的小型飛艇作為研究對象,針對無人飛艇的軟硬件組成結構,設計和開發了一種基于CLIPS的智能無人飛艇故障診斷專家系統。首先,借助故障樹分析法以無人飛艇系統較常見的故障狀態作為分析的出發點,找出能導致這一故障發生的全部因素即中間事件,按此層級查找的方式一直追溯到引起系統發生故障的底層原因。接著,基于故障分析樹,利用CLIPS專家系統框架,設計了表征飛艇工作狀況的事件庫及專家知識表達的規則庫,并采用正向推理控制。此外,為最大限度的方便用戶使用故障診斷專家系統,本文通過靜態鏈接的方式將CLIPS框架嵌入C++中,在此基礎上利用Visual Studio中的MFC框架開發了人機界面。為了實現用戶輸入與CLIPS的數據交換,除借助CLIPS內置的EnvLoad函數加載規則庫和事實庫外,本文另外設計了“路由跳轉”功能作為交換接口。最后,為本文專家知識庫設計了維護和編輯界面,實現對新的故障知識的增加和刪改,從而完成了故障診斷專家系統的開發,為智能無人飛艇的故障診斷、分析和排除提供了平臺和支持技術。
1? ?需求分析
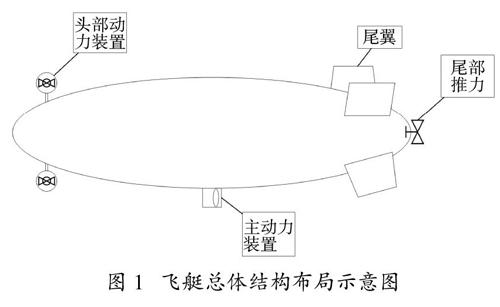
所研究的智能無人飛艇對象采用中舟100飛艇的單囊體布局形式,以囊體為主體,外露布置頭錐、動力裝置、尾翼及設備吊艙等,并采用“X”形布置的梯形尾翼,舵面偏轉角度-30-30°;主要結構部件包括氣囊、副氣囊、吊艙、起落裝置、尾翼、頭錐等,智能無人飛艇的整體結構如圖1所示。
圖1? ?飛艇總體結構布局示意圖
本系統設計的總體目標是實現對智能無人飛艇各個系統結構的設備故障進行診斷和定位。由于當前人工故障診斷存在操作流程不規范,診斷效率低下等問題,因此,需要設計一個基于專家系統的無人飛艇故障診斷系統,從而有效地幫助普通操作人員提高無人飛艇故障診斷的效率及準確度。為了實現該目標,并充分利用智能無人飛艇領域內專家現有的故障診斷知識和經驗,需重點考慮如下兩點:
(1)結合無人飛艇的飛行狀態和故障現象并借助各個艇載設備檢測方法,采用科學可行的故障診斷方式-故障專家系統,來實現智能無人飛艇的故障診斷和定位。
(2)在無人飛艇后續的實際飛行過程中,對于新的故障知識,可將新的專家經驗添加到故障診斷專家系統中,從而有效的解決專業診斷人員缺乏,診斷效率低下等實際問題。
綜上所述,為了實現智能無人飛艇的故障診斷,本系統應實現的主要功能主要包含兩方面:一是具有故障診斷功能,能夠結合專家知識經驗通過規則推理快速定位故障點,并生成故障診斷結果報告;二是具有知識庫管理和編輯功能,可實現對專家知識庫進行增加、刪除和修改等維護操作。
2? ?CLIPS專家系統框架簡介
CLIPS即“C語言集成產生式系統(CLanguage Integrated Production System)”,它是美國航空航天局/約瀚遜太空中心(NASA/Johnson Space Center)用C語言設計的,是一種多范例編程語言[7]。該語言支持基于規則的、面向對象的和面向過程的編程,是一種高效的開發專家系統工具,為構建基于規則或對象的專家系統提供了完整的底層開發環境[8]。在語法方面,CLIPS規則與ART、ART-IM、Eclipse和Cognate語言的規則極為相似,而且更加簡便、低成本和易于與外部系統集成[9]。
目前,國內外各研究機構和高校利用CLIPS框架進行專家系統設計已經取得了一定的研究成果,如文獻[10]研究了專家系統在飛機燃油系統故障診斷中的應用,使用CB(C ++ Builder)和CLIPS開發了一套診斷專家系統,并實驗驗證了系統的準確性。故本文選擇CLIPS專家系統框架作為智能無人飛艇故障診斷專家系統的開發工具是可行的。
3? ?故障診斷專家系統總體設計
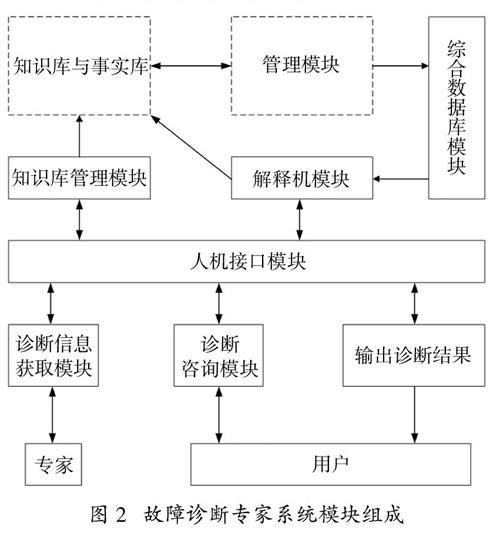
通過對系統需求的分析,結合專家系統的基本原理,結合開發的方便性,本文所構建的基于CLIPS的無人飛艇故障診斷系統主要包含了:綜合數據庫模塊、診斷信息獲取模塊、知識庫管理模塊、診斷咨詢模塊、管理模塊、解釋機模塊和人機接口模塊。系統的整體結構如圖2所示。
綜合數據庫模塊:主要用來存放無人飛艇正常飛行狀態的狀態數值信息的模板事實、當前飛行狀態的初始事實數據、專家知識構成的邏輯規則以及推理過程中得到的中間結果等,該部分主要基于CLIPS編寫規則和自定義模板來完成。
診斷信息獲取模塊:是專家診斷人員與故障診斷系統信息交互的橋梁,將與無人飛艇故障診斷的相關的專家知識通過整理和歸納,編輯為CLIPS專家知識可接受的知識表示方式。
圖2? ?故障診斷專家系統模塊組成
知識庫管理模塊:本質上也是對無人飛艇的故障診斷知識的獲取,通過對已有知識庫的繼續指導,實現對故障診斷知識的擴展,修改以及刪除等管理與維護操作。
咨詢診斷模塊:主要供操作用戶輸入關于無人飛艇的初始故障事實信息,或在推理過程中增添新的輔助事實,該模塊由Visual Studio開發。
管理模塊:包含了專家系統的推理機的全部內容,決定了知識的選擇和規則的觸發順序等。除了包含常用的通用控制規則外,還包含了沖突消解功能。整個管理模塊里的規則控制策略均基于CLIPS完成。
解釋機模塊:主要負責將CLIPS推理的中間過程進行解釋并顯示到用戶界面或將最后的診斷結果回傳到Visual Studio中,該部分由Visual Studio完成。
人機接口模塊:是與CLIPS進行交互的界面接口,利用Visual Studio中的MFC框架來完成專家對知識庫的擴充和用戶的手動輸入故障現象的交互界面設計。
4? ?故障診斷專家系統構建與開發
4.1? ?故障樹設計
故障樹分析法在航空航天故障分析領域具有重要應用,故障樹模型是描述診斷對象結構、功能和關系的一種定性因果模型,它體現了故障傳播的層次性及因果關系[11]。故障樹分析法以系統常見的故障狀態作為分析的目標即頂層事件,反推出能導致這一故障發生的全部可能因素,即中間事件,按此方式一直追溯到引起系統發生故障的底層原因,也稱底層事件,將系統的頂層事件與中間事件和底層事件之間的邏輯關系用邏輯門聯結起來,形成故障樹,以表示系統與產生原因之間的關系[12]。
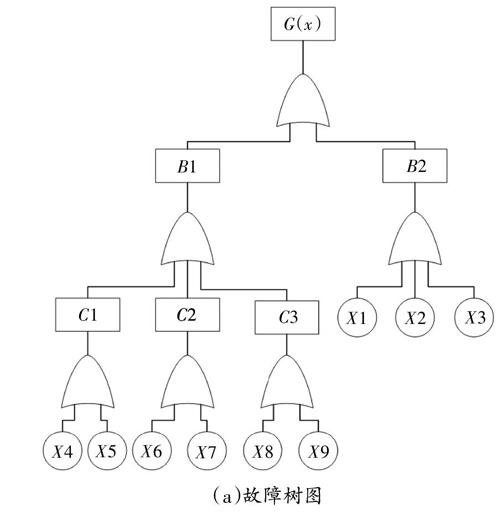
故本系統首先根據無人飛艇的系統結構將不同類型的故障歸類,然后針對每一大類系統及其附件進行故障追溯,即從最表層的故障現象追溯至中間故障征兆,根據因果關系,由上至下,層層細分,直至底層故障。從而把本無人飛艇的常見的專家系統零散的故障知識集合起來,構成一個具有邏輯關系的整體。故障樹中羅列的底層事件就是無人飛艇具體零部件的損壞原因,而頂層事件與中間事件上下層故障之間的關系就是無人飛艇故障診斷專家系統知識庫中的知識。下面以智能無人飛艇的姿態控制發動機系統故障層級為例,按照因果關系整理得到的故障樹示例如圖3所示。
其中,G(x)為頂層事件,代表最表層的飛艇的姿態控制發動機系統故障;B1,B2以及C1~C3均為中間事件,代表影響飛艇的姿態控制發動機的中間故障征兆;X1~X9為底層事件,表示追溯到最底層的不可細分的零部件故障。上下層事件間的邏輯關系僅含或門,所以該姿態控制發動機系統故障樹中的任何一個底層事件均是一個最小分割集,底層事件中包含的故障均會對頂層事件產生影響。通過建立該種以因果關系為線索的無人飛艇故障樹模型,既能方便使用專家系統工具CLIPS進行知識的表達,也能根據其層次結構設計推理控制策略。
(a)故障樹圖
(b)故障樹節點實例
圖3? ?飛艇故障樹示例
4.2? ?事實庫設計
為了描述飛艇的工作情況,本系統通過飛艇正常狀態信息范圍的知識模板和實際飛行狀態模板加以描述,主要借助CLIPS中的自定義模板功能實現。
CLIPS自定義模板包括模板名和槽名,每個槽代表一種屬性,可以設置允許的類型和值,其中槽值可以是單值也可以是多值的[12]。自定義模板被實例化后,即可表示無人飛艇不同結構部件的狀態信息。其中本文用來描述飛艇正常狀態信息范圍的知識模板如下所示:
(deftemplate device-normal
(slot name (type STRING));飛艇結構部件
(slot index(type INTEGER));序號索引
(slot low-line (type INTEGER));最低閾值
(slot high-line(type INTEGER)));最高閾值
根據上述模板,用戶可以對應插入飛艇的正常狀態信息,如飛艇正常飛行時的主氣囊結構的壓力差最低閾值為350Pa,最高閾值為500Pa時,可向專家系統中插入如下初始事實:
(initial-fact)
(device-normal (name“主氣囊壓力差”)
(index 1)
(low-line 350)
(high-line 500))
針對無人飛艇的實際飛行狀態模板,本系統考慮使用序號索引與前文中的正常狀態信息范圍的知識模板進行聯系匹配,后續插入相同零部件的初始事實時,可依據序號索引進行標志匹配,故相應的設計了無人飛艇實際飛行狀態的自定義模板如下:
(deftemplate device-status
(slot index)? ?;序號索引
(slot status))? ;飛行狀態值
基于上述兩個自定義模板,就可以根據飛艇的正常運行狀態及實際飛行過程進行描述,按照槽所對應的數據類型和項目類別不斷向故障診斷專家系統插入初始事實。
4.3? ?規則庫設計
在5.1節中,已建立了無人飛艇各組成結構的故障樹,為了將故障樹中的故障知識提取出來構建專家系統知識庫,需采用合理的知識表達方式構建規則庫。且CLIPS專家系統框架支持基于規則或面向對象的表達方式,文獻[4]中采用了面向對象方法,但是面向對象等方法不擅長邏輯推理,其規則比產生式規則更復雜,產生式規則表示法不僅結構簡單,且廣泛適用于經驗和知識的關聯過程,用以闡述事物間的因果關系,故本文采用CLIPS框架中的產生式規則知識表示方法來實現無人飛艇故障診斷專家系統規則庫的設計。
CLIPS系統中的規則是專家知識的重要組成部分,分為RHS和LHS,即規則左件和規則右件。一條規則可看作為if和then的結合,規則可以有多個模式和行為,即可以有多個規則左件和規則右件[13]。CLIPS的規則一般格式如下所示:
(defrule<規則名>[<規則描述>]
(<故障模式>)
=>
[assert 下一級故障模式]/printout t (故障原因)(故障處理措施))
CLIPS專家系統內部通過規則的模式與綜合數據庫中的事實相匹配,如果規則匹配成功,則該條規則被激活放入議程中等待被執行,該過程中也可能會有規則后件的行為,向綜合數據庫中增添新的事實數據,從而不斷的為故障診斷專家系統提供推理事實依據。
根據上述故障樹知識,以上文中的B1中間故障征兆為例,對其下一級故障現象C2向用戶詢問的推理過程,利用CLIPS的產生式規則表示法,編寫出上述故障樹中的中間故障信息進行交互推理過程的規則如下:
上述規則表示當操作用戶根據前一個問題對輔助征兆事實B1做出回答為No的反饋,并通過assert指令插入到綜合數據庫中,CLIPS將B1toC2規則前件與綜合數據庫中的事實進行匹配,逐步縮小故障范圍并向用戶提出新的中間輔助事件C2,即向用戶詢問氣路導管是否通暢,并將該問題標記為C2,通過人機界面將問題輸出并等待用戶新的反饋回答。
與上述步驟類似,以無人飛艇的每一類系統結構作為頂層事件,然后利用CLIPS產生式規則方式將造成系統故障原因由上至下,逐級分解為中間事件,轉化為CLIPS內部可識別的語法規則逐級推理,最終確定底層故障原因。
4.4? ?推理控制策略
對于推理方式的選擇,故障診斷專家系統通常有兩種方式:正向推理和反向推理[14]。正向推理是一種以事實數據為驅動的控制策略,它是按照由條件推出結論的方向進行的推理方式,它一般從已獲取到的故障模式事實出發,將故障事實與動態數據庫中的所有規則的前件進行匹配,通過匹配來提取更多的信息[14]。反向推理是一種目標作為驅動的控制策略,它的推理方式正好和正向推理相反,是通過某種方式先假設一個故障原因,然后由故障原因出發,將所有的專家知識的規則后件與故障原因匹配,然后驗證導出的知識前件中的故障現象或故障模式是否與已有的故障事實一致[15]。針對飛艇故障診斷實例,用戶最容易獲取的是飛艇出現故障時的現象和狀態數據信息,故障樹模型中的各個子節點與其父節點構成了正向因果關系鏈,這種因果關系鏈與“if…then…”型故障診斷規則本質上具有一致性。此外,CLIPS是基于產生式的前向推理引擎,僅支持正向鏈規則,故系統選擇正向推理思想進行控制,可以很好的展示推理的邏輯和過程,同時也方便理解。圖4所示即為CLIPS專家系統中正向推理的流程圖。
對于專家系統運行過程中,推理引擎將規則與當前聲明為工作內存的所有事實進行匹配。CLIPS專家系統框架中主要采用Rete算法進行模式匹配,它用于根據數據存儲及其事實確定系統的哪些規則應該觸發[13],無需額外編寫模式匹配算法。若在匹配過程中,有多個規則同時被激活,則可能造成規則的矛盾和沖突,影響下一步的正確推理,故需要設計沖突消解機制,在本無人飛艇中,通過CLIPS中的(declare salience)命令對不同規則設定優先級順序實現規則的沖突消解。
4.5? ?接口及數據交換設計
CLIPS專家系統框架雖然對于專家系統底層知識庫和推理機的構造上十分方便,但在故障診斷過程以及知識庫的擴展時均需在CLIPS的IDE中進行文本代碼編輯,缺乏良好的人機交互界面。為了設計人機交互界面,首先需考慮的問題就是將CLIPS專家系統底層框架嵌入到C++環境中,方便后續借助MFC框架設計交互界面。此外,還需考慮的問題就是嵌入完成后如何與C++進行數據交換。
圖4? ?正向推理流程圖
(1)CLIPS與C++的嵌入
為了運行集成例子,必須安裝源代碼,可通過運行CLIPS 6.30 Windows源代碼安裝器。通過在CLIPS官網上獲取源碼并借助Visual Studio編譯生成相應的動態鏈接庫文件和靜態數據連接庫文件,對于CLIPS的嵌入有兩種解決辦法:顯式鏈接和隱式鏈接方案。本文所采用的方式為隱式鏈接的方案,其好處是在調用完成后,無需另外釋放資源,具體實現步驟如下:
Step1:將上述生成的CLIPS.dll文件放置到工程目錄;
Step2:設置項目屬性——庫目錄為CLIPSStatic32.lib文件所在的路徑;
Step3:將lib文件添加到項目屬性——鏈接器——輸入——附加依賴項
Step4:在項目的源文件中添加clipscpp.h頭文件由于clipscpp.h為C語言編碼,所以包含時添加extern“C”。通過上述步驟,便可調用普通函數、類、變量嵌入CLIPS專家系統框架。
(2)CLIPS與C++的數據交換
對于Clips從C++讀取數據,可以直接通過使用CLIPS中內置的EnvLoad函數,通過C++加載外部clp文件,其中可以包含前面根據已有的專家故障診斷知識編寫的clp知識庫文件和根據事實模板定義的有關無人飛艇的各設備部件的正常數據信息的事實庫clp文件。
對于Clips數據輸出到C++,本文采用“打印跳轉”功能實現,即更改CLIPS的內的printout函數的路由地址,改成軟件需要的自定義函數,這樣后面就可以在函數內部實現想要輸出和數據交換的功能,具體步驟如下所示:
1)需要在項目的頭文件內包含“clipscpp.h”文件,并在項目里包含CLIPSStatic32.lib庫文件,
2)創建自定義的Router類,用來實現打印跳轉功能,基于該類設計兩個虛函數Query和Print。
3)對Query和Print函數具體實現,其中query是跳轉時需要的判斷函數,判斷此次打印是否需要跳轉。print是要跳轉到的函數,在該自定義函數中,可以實現業務邏輯,數據輸出等功能。
通過上述步驟,便可把CLIPS內的print函數路由到用戶自定義的函數,從而可以直接在知識內將結論或中間推理信息直接print到MFC的文本框。
4.6? ?人機界面設計
為了最大限度的方便用戶,使用戶易于操作本系統在前文將CLIPS工具嵌入C++的基礎上,借助visual studio中的MFC框架來開發人機界面,基于對話框應用程序,使用Tree Control等控件實現的主要功能界面包括故障診斷主界面和知識庫編輯維護界面。
其中,故障診斷主界面如圖5所示,可分為三個區域,左側的故障征兆選擇區域交互診斷區:用戶可以點擊左側樹控件選擇故障部位和故障征兆添加到故障診斷專家系統的綜合處理數據庫中;右上方的數據錄入診斷區:用戶可通過數據錄入按鈕輸入初始事實;右下方的推理過程解釋區:該解釋顯示區可顯示無人飛艇的故障診斷推理中間過程及診斷結果輸出。
知識庫編輯維護界面如圖6所示,同樣可分為三大區域,左側的故障樹選擇查看和編輯區:操作用戶可通過在左側選擇頂層故障事件,點擊查看按鈕之后,系統會加載對應知識庫的規則,用戶可以根據需要對其查看和編輯。同時,點擊下方編輯按鈕可對無人飛艇的整體故障樹結構進行擴充,方便后續添加具體的專家知識。右上方的新增故障知識維護區:點擊交互模式知識添加或數據模式知識添加按鈕可對后續新的故障知識進行添加。右下方的故障知識解釋顯示區:該顯示區用來顯示具體的CLIPS規則知識。
圖5? ?故障診斷專家系統推理界面
圖6? ?故障診斷專家系統知識編輯主界面
6? ?結? ?論
通過對無人飛艇的組成結構和故障特點進行了分析,將專家知識和經驗匯總整理為了故障樹的形式。設計了智能無人飛艇故障診斷專家系統的總體模塊和架構。借助CLIPS專家系統開發工具,構建了描述飛艇運行飛行狀況的自定義模板。利用產生式規則表示方式將故障樹中的故障知識提取出來構建專家系統知識庫,使用正向推理編寫控制規則與策略。基于底層CLIPS專家系統框架,在windows平臺上利用visual studio設計了與CLIPS框架的嵌入和數據交換接口,開發了關于無人飛艇的故障診斷專家系統軟件。該系統實現了根據故障現象快速診斷飛艇故障原因的功能,同時可對該系統中的專家知識進行編輯和維護,在一定程度上模擬專家思維過程進行故障診斷工作。
在后續實際飛行里,所建立系統期望通過經驗的不斷積累,不斷的對專家知識庫進行擴充和完善,從而更加準確和全面的對無人飛艇飛行過程中的故障進行診斷。此外,隨著研究的不斷深入,未來可考慮利用專家系統對智能無人飛艇的故障進行故障預測,提前預判飛艇可能發生的故障,并將專家系統和容錯控制相結合,實現主動容錯控制,提高無人飛艇飛行的安全性與可靠性。
參考文獻
[1]? ? 孫珺. 小型無人飛艇的建模與飛行控制系統的設計[D]. 南京:南京理工大學,2009.
[2]? ? 賈瑞,吳梅. 舵面故障情況下推力矢量在飛艇中的應用研究[J]. 科學技術與工程,2013,13(8):2302—2306.
[3]? ? 田鈞. 典型故障情況下飛艇矢量飛行研究[J]. 科學與財富,2015(4):66—66.
[4]? ? 石榮德,趙廷弟,屠慶慈,等. 故障診斷專家系統[J]. 北京航空航天大學學報,1995(4):7—12.
[5]? ? 張博,王大華,余刃. 飛艇主氣囊壓力告警的故障診斷與維修決策[C]// 中國浮空器大會,2007.
[6]? ? 王梓航,李磊,李建明. 三相開環Z源逆變器短路故障診斷研究[J]. 計算技術與自動化,2018(2):33—37.
[7]? ? 溫國誼,査光東,張翔. 基于CLIPS的某型飛機故障診斷專家系統的設計與實現[J]. 中南大學學報:自然科學版,2013(s1):157—161.
[8]? ? TAN D ,LI P ,PAN X . Embedded fault diagnosis expert system based on CLIPS and ANN[J]. Journal of Vibration Engineering,2007,20(5):957—960.
[9]? ? GELGELE H L,WANG K. An expert system for engine fault diagnosis:development and application[J]. Journal of Intelligent Manufacturing,1998,9(6):539—545.
[10]? LONG H,WANG X. Aircraft fuel system diagnostic fault detection through expert system[C]// World Congress on Intelligent Control & Automation,2008.
[11]? 劉治國,蔡增杰,穆志韜,等. 基于CLIPS的飛機液壓系統故障診斷專家系統構建研究[J]. 海軍航空工程學院學報,2011,26(1):45—48.
[12]? 沈大偉,莊誠,王學雷. 基于CLIPS的故障診斷專家系統開發[J]. 化工自動化及儀表,2012,39(4):450—453.
[13]? PENG Z . A new method of developing fault diagnosis expert system[J]. Microcomputth Applications,2000(3):76—79.
[14]? DOU D,ZHAO Y. Fault diagnosis of rotating machinery using data mning and CLIPS-based expert system[C]// Isecs International Colloquium on Computing,Communication,Control,& Management,2008.
[15]? SONG Z A. Fault diagnosis expert system of the electrical traction shearer type 3LS[C]// Wase International Conference on Information Engineering,2010.
