基于自適應(yīng)互補(bǔ)濾波的滾轉(zhuǎn)角測(cè)量算法
2020-04-01 11:08:42霍鵬飛雷瀧杰
探測(cè)與控制學(xué)報(bào) 2020年1期
關(guān)鍵詞:測(cè)量
陳 督,霍鵬飛,陳 超,雷瀧杰
(西安機(jī)電信息技術(shù)研究所,陜西 西安 710065)
0 引言
彈體滾轉(zhuǎn)姿態(tài)角是制導(dǎo)彈藥判定實(shí)際飛行彈道的基本原始信息之一,為了提高測(cè)量精度和抗干擾能力,近年來(lái)普遍采用多傳感器方案進(jìn)行姿態(tài)測(cè)量,其姿態(tài)解算的關(guān)鍵技術(shù)為數(shù)據(jù)融合技術(shù)[1]。基于MEMS的傳感器具有可靠性高、小體積、低成本和高集成度等特點(diǎn)[2],隨著MEMS技術(shù)的迅速發(fā)展,MEMS傳感器的精度不斷提高,其在多傳感器組合方面的應(yīng)用也隨之不斷增加。文獻(xiàn)[3]對(duì)擴(kuò)展卡爾曼濾波器(EKF)和互補(bǔ)濾波器進(jìn)行了比較驗(yàn)證,表明了互補(bǔ)濾波器相對(duì)于EKF具有較快的收斂速度,但是由于只限于兩種傳感器,其精度還是有限。文獻(xiàn)[4]利用三軸陀螺儀提出四元數(shù)擴(kuò)展卡爾曼濾波器,但是未對(duì)地磁矢量加以考慮,磁場(chǎng)的干擾仍未得到有效的解決。國(guó)內(nèi)外在互補(bǔ)濾波器的研究方面,對(duì)于兩種不同傳感器數(shù)據(jù)融合頗為注重[5],致使多傳感器數(shù)據(jù)資源沒有得到充分的利用,此外,還多用陀螺儀輔助磁羅盤完成故障檢測(cè)[6],對(duì)陀螺儀的精度要求較高。本文針對(duì)上述問題,提出了基于自適應(yīng)互補(bǔ)濾波的滾轉(zhuǎn)角測(cè)量算法。
1 滾轉(zhuǎn)角測(cè)量數(shù)學(xué)模型和互補(bǔ)濾波理論
基于互補(bǔ)濾波器的多傳感器姿態(tài)信息融合,首先在傳感器級(jí)別利用慣性傳感器進(jìn)行姿態(tài)解算,得到各個(gè)傳感器解算的結(jié)果,隨后利用互補(bǔ)濾波器進(jìn)行數(shù)據(jù)融合得到載體的姿態(tài)信息。
1.1 雙軸磁傳感器測(cè)量滾轉(zhuǎn)角數(shù)學(xué)模型
彈體的速度矢量如圖1所示,地磁要素如圖2所示。
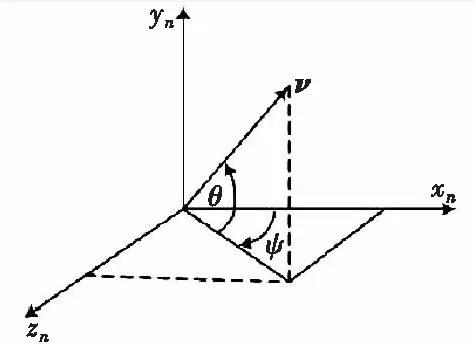
圖1 地面坐標(biāo)系下的速度矢量Fig.1 Velocity vector in ground coordinate system
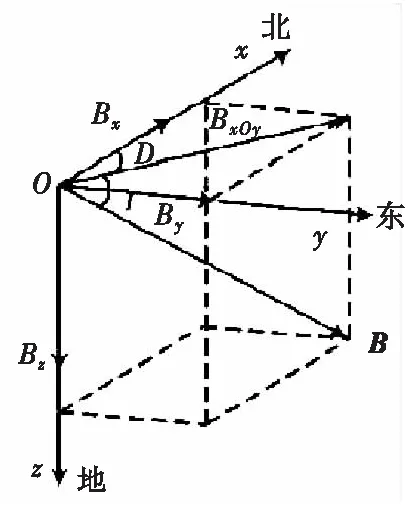
圖2 地磁要素圖Fig.2 Geomagnetic feature map
設(shè)地面坐標(biāo)系下的磁場(chǎng)向量Mg為(mxg,myg,mzg),雙軸磁強(qiáng)計(jì)測(cè)得彈體坐標(biāo)系下磁場(chǎng)向量Mb為(x,myb,mzb),其中x與解算滾轉(zhuǎn)角無(wú)關(guān)。由文獻(xiàn)[7]知Mg與Mb關(guān)系如下:
(1)
令:
k1=-sinθcosψmxg+cosθmyg+sinθsinψmzg
k2=sinψmxg+cosψmzg
k3=sinψmxg+cosψmzg
k4=sinθcosψmxg-cosθmyg-sinθsinψmzg
由速度矢量可以解出θ和ψ,則由式(1)可解出:
(2)
由式(2)可根據(jù)磁強(qiáng)計(jì)信息解出滾轉(zhuǎn)角。
1.2 單軸陀螺測(cè)量滾轉(zhuǎn)角數(shù)學(xué)模型
設(shè)ωx是陀螺儀的輸出,ω0是陀螺輸出的零偏。通過下式可以由陀螺信息解算滾轉(zhuǎn)角。
(3)
當(dāng)采樣率足夠高時(shí),式(3)可以近似為:
γn=(ωx-ω0)ΔT+γn-1
(4)
通過算法確定當(dāng)前零偏量和滾轉(zhuǎn)角初始值即可計(jì)算當(dāng)前的滾轉(zhuǎn)角度。
1.3 互補(bǔ)濾波理論
假如我們對(duì)一個(gè)物理量有兩種觀測(cè)手段,一種容易受到高頻干擾,另一種容易受到低頻干擾,那么我們就可以設(shè)計(jì)兩個(gè)互補(bǔ)的濾波器F1和F2。F1是低通濾波器,F2是高通濾波器,且F1+F2≡1[8]。
互補(bǔ)濾波算法是將干擾信號(hào)在頻率上具有互補(bǔ)特性兩個(gè)信號(hào)通過上述的一組互補(bǔ)濾波器,然后加權(quán)求和從而提取有用信息的方法。基于互補(bǔ)濾波的滾轉(zhuǎn)角測(cè)量公式如下:
γ=K·γmag+(1-K)·γL
(5)
式(5)中,γ是當(dāng)前滾轉(zhuǎn)角,γmag是F1濾波器輸出的測(cè)量結(jié)果,γL是濾波器F2輸出的測(cè)量結(jié)果,K是互補(bǔ)濾波算法調(diào)節(jié)參數(shù),它的取值直接影響到濾波精度。
2 基于自適應(yīng)互補(bǔ)濾波的滾轉(zhuǎn)角測(cè)量
互補(bǔ)濾波器是針對(duì)同一個(gè)信號(hào)的不同傳感器測(cè)量得到的噪聲特性,從頻率域分辨和消除噪聲。相比于時(shí)域的濾波器,并不需要對(duì)信號(hào)進(jìn)行精確建模,而且操作簡(jiǎn)單易實(shí)現(xiàn)[9]。
互補(bǔ)濾波的關(guān)鍵是設(shè)置合適的濾波器參數(shù)K。針對(duì)引信轉(zhuǎn)速高,干擾特征變化明顯的問題,本文利用磁測(cè)數(shù)據(jù)γmag計(jì)算出角速度ωm,然后計(jì)算ωm與陀螺儀輸出ω的差值eω,最后通過eω由式(6)—式(8)自適應(yīng)調(diào)整互補(bǔ)濾波的系數(shù)K,從而改善在不同干擾下滾轉(zhuǎn)角算法的適應(yīng)性。
(6)
eω=ωm-ω
(7)
算法需要根據(jù)陀螺角速度誤差和當(dāng)前轉(zhuǎn)速自動(dòng)調(diào)整濾波器系數(shù)K從而達(dá)到自動(dòng)適應(yīng)各種場(chǎng)景的目的。當(dāng)引信轉(zhuǎn)速降低,陀螺的輸出誤差隨之減小;當(dāng)引信進(jìn)入修正階段,磁強(qiáng)計(jì)受到舵機(jī)的干擾,誤差隨之增大。自適應(yīng)系統(tǒng)將根據(jù)式(8)自動(dòng)分辨當(dāng)前的干擾情況,采取更恰當(dāng)?shù)腒值,從而提高解算精度。
(8)
同時(shí)由于設(shè)計(jì)的濾波器在通帶內(nèi)存在t秒的群延時(shí),產(chǎn)生的延時(shí)誤差wt在高轉(zhuǎn)速情況下會(huì)更加顯著。因此在高轉(zhuǎn)速且eω較小的情況下對(duì)濾波器輸出進(jìn)行延時(shí)補(bǔ)償可以顯著降低延時(shí)帶來(lái)的誤差。
自適應(yīng)互補(bǔ)濾波系統(tǒng)框圖如圖3所示。
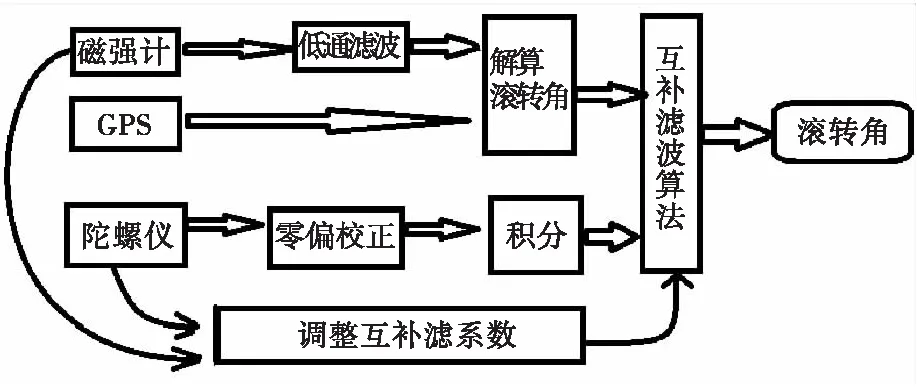
圖3 系統(tǒng)框圖Fig.3 System block diagram
3 仿真驗(yàn)證
為了驗(yàn)證算法在高轉(zhuǎn)速、轉(zhuǎn)速減小、低轉(zhuǎn)速?gòu)椀佬拚拳h(huán)境下的測(cè)量精度和穩(wěn)定性,分別在三個(gè)場(chǎng)景采用K取1,0.5,0.1等定值的傳統(tǒng)互補(bǔ)濾波算法和自適應(yīng)互補(bǔ)濾波算法進(jìn)行仿真對(duì)比。
考慮到高速旋轉(zhuǎn)以及減速旋轉(zhuǎn)時(shí)舵機(jī)處于靜止?fàn)顟B(tài),噪聲主要是高斯白噪聲,彈道修正階段,舵機(jī)噪聲強(qiáng)且同時(shí)存在高斯白噪聲,設(shè)計(jì)以下三個(gè)場(chǎng)景進(jìn)行仿真驗(yàn)證。
在高速旋轉(zhuǎn)場(chǎng)景下使轉(zhuǎn)速維持在300 r/s,陀螺儀引入31.4 rad/s的零偏,雙軸磁強(qiáng)計(jì)和陀螺儀各引入1 dBm/Hz的高斯噪聲;減速環(huán)境下,轉(zhuǎn)速100 r/s減到0 r/s,陀螺儀引入31.4 rad/s零偏,各傳感器各加1 dBm/Hz的高斯噪聲;彈道修正階段,陀螺加上0.3 rad/s的零偏,傳感器加上從實(shí)驗(yàn)樣機(jī)提取的實(shí)際舵機(jī)噪聲。圖4—圖6為上述各場(chǎng)景下的濾波誤差對(duì)比。
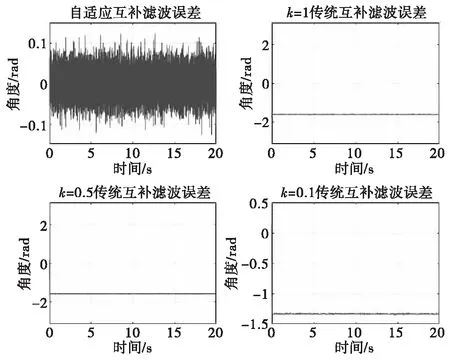
圖4 高轉(zhuǎn)速下的幾種情況誤差對(duì)比Fig.4 Comparison of several algorithm errors at high speeds
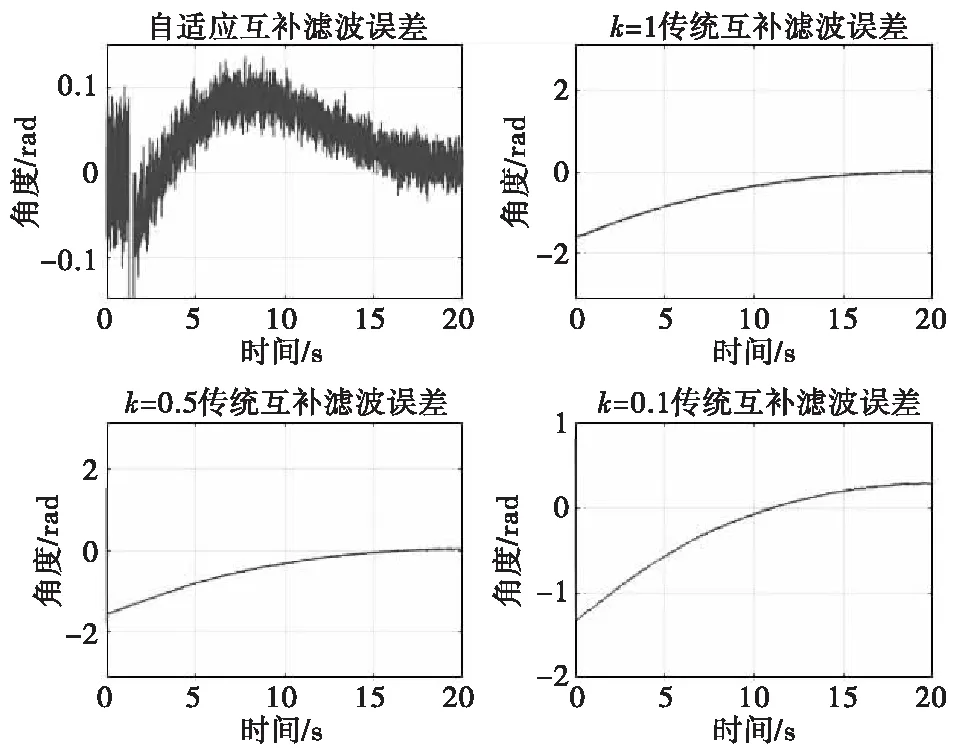
圖5 減旋階段的誤差對(duì)比Fig.5 Comparison of errors in the derotation phase
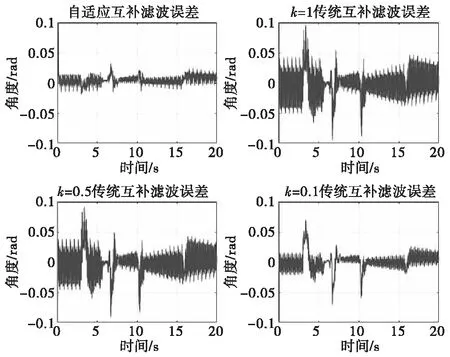
圖6 修正階段的誤差對(duì)比Fig.6 Comparison of errors during attitude correction
由圖4可見,傳統(tǒng)互補(bǔ)濾波器在高轉(zhuǎn)速時(shí)濾波器延時(shí)帶來(lái)的誤差十分顯著。圖5顯示,在轉(zhuǎn)速減小的場(chǎng)景下傳統(tǒng)互補(bǔ)濾波器誤差隨著轉(zhuǎn)速減小而減小。圖4、圖5中的自適應(yīng)互補(bǔ)濾波誤差均小于0.12 rad,顯著優(yōu)于傳統(tǒng)互補(bǔ)濾波器。
圖6表明傳統(tǒng)互補(bǔ)濾波器在低轉(zhuǎn)速下由濾波器延時(shí)帶來(lái)的誤差已經(jīng)可以忽略不記,且隨著K值減小,誤差有所減小,而自適應(yīng)互補(bǔ)濾波誤差小于0.03 rad,精度比傳統(tǒng)互補(bǔ)濾波提高了2~3倍。可見在全彈道環(huán)境下,自適應(yīng)互補(bǔ)濾波算法均具有穩(wěn)定的測(cè)量效果。
4 結(jié)論
本文提出了基于自適應(yīng)互補(bǔ)濾波的滾轉(zhuǎn)角測(cè)量算法。該方法采用互補(bǔ)濾波器對(duì)速率陀螺儀、磁強(qiáng)計(jì)信息進(jìn)行了融合,針對(duì)引信在出炮口時(shí)刻高速旋轉(zhuǎn),衛(wèi)星對(duì)準(zhǔn)時(shí)刻的滾轉(zhuǎn)減旋以及彈道修正時(shí)刻的滾轉(zhuǎn)角穩(wěn)定等不同彈道特征點(diǎn)處的干擾特性,設(shè)計(jì)了參數(shù)自適應(yīng)調(diào)整的互補(bǔ)濾波器,能夠有效克服傳統(tǒng)互補(bǔ)濾波器無(wú)法適應(yīng)引信的全部工作場(chǎng)景的困難。理論分析及仿真結(jié)果表明,該算法能夠有效補(bǔ)償高速旋轉(zhuǎn)情況下濾波器延時(shí)帶來(lái)的延時(shí)誤差、陀螺零偏漂移、舵機(jī)高速運(yùn)動(dòng)引入的磁場(chǎng)干擾等,能夠在干擾存在的情況下較傳統(tǒng)固定系數(shù)互補(bǔ)濾波器滾轉(zhuǎn)角測(cè)量精度提升2~3倍,具有更強(qiáng)的環(huán)境適應(yīng)性和工程可實(shí)現(xiàn)性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00