基于近景攝影測量技術的基坑監測研究
2020-03-31 19:41:21宗愛華王連松
科技創新導報 2020年34期
宗愛華 王連松
摘? 要:相對于傳統監測方法,近景攝影測量技術具有瞬間獲取被測物體的幾何及物理信息,外業工作較少等優點。但由于專用量測攝影機價格昂貴且操作復雜,制約了近景攝影測量技術的發展與應用。本文將研究普通數碼相機在邊坡監測上的應用,結合實際工程,通過GPS采集的少量點作為控制點來解算大量未知點的坐標,具有很好的現實意義。
關鍵詞:近景攝影測量? 基坑? 位移監測? GPS
Abstract: Compared with the traditional monitoring methods, close range photogrammetry has the advantages of instantaneous acquisition of geometric and physical information of the measured object, and less field work. However, the development and application of close range photogrammetry technology are restricted due to the high price and complex operation of special measuring camera. This paper will study the application of ordinary digital camera in slope monitoring. Combined with practical engineering, a small number of points collected by GPS are used as control points to calculate the coordinates of a large number of unknown points, which has a good practical significance.
Key Words: Close range photogrammetry; Foundation pit; Displacement monitoring; GPS
攝影測量是一門利用光學攝影機拍攝像片,根據像片影像來確定被測物體的位置、大小、形狀和相互關系的科學技術。依據測量目的通常劃分為兩類:地形攝影測量和非地形攝影測量。其中,非地形攝影測量指的是應用在工業測量和工程測量中的攝影測量。而近景攝影測量指的是測量距離在300m以內,拍攝地點處在物體周邊的攝影測量。其中將以數字相機為圖像采集傳感器,并對所攝圖像進行數字處理的近景攝影測量稱為數字近景攝影測量。目前,該技術已經在包括生物醫學、工業和建筑學等在內的眾多基礎研究和應用研究領域得到不錯的發展。
1? 近景攝影測量外業
本次工程實例選擇了北京某地塊基坑工程,位于北京市朝陽區,該項目為超高層住宅樓工程。本次監測的主要硬件主要有:尼康數碼相機,南方GPS監測儀,標志點塑料板,其中標志點模板主要有兩種,一種是20cm×30cm×5mm長方形板,一種是25cm×25cm×5mm正方形板。標志點固定在坡面上的方法是中心和4個角上分別都釘入一個釘子,保證標志物的穩定性。
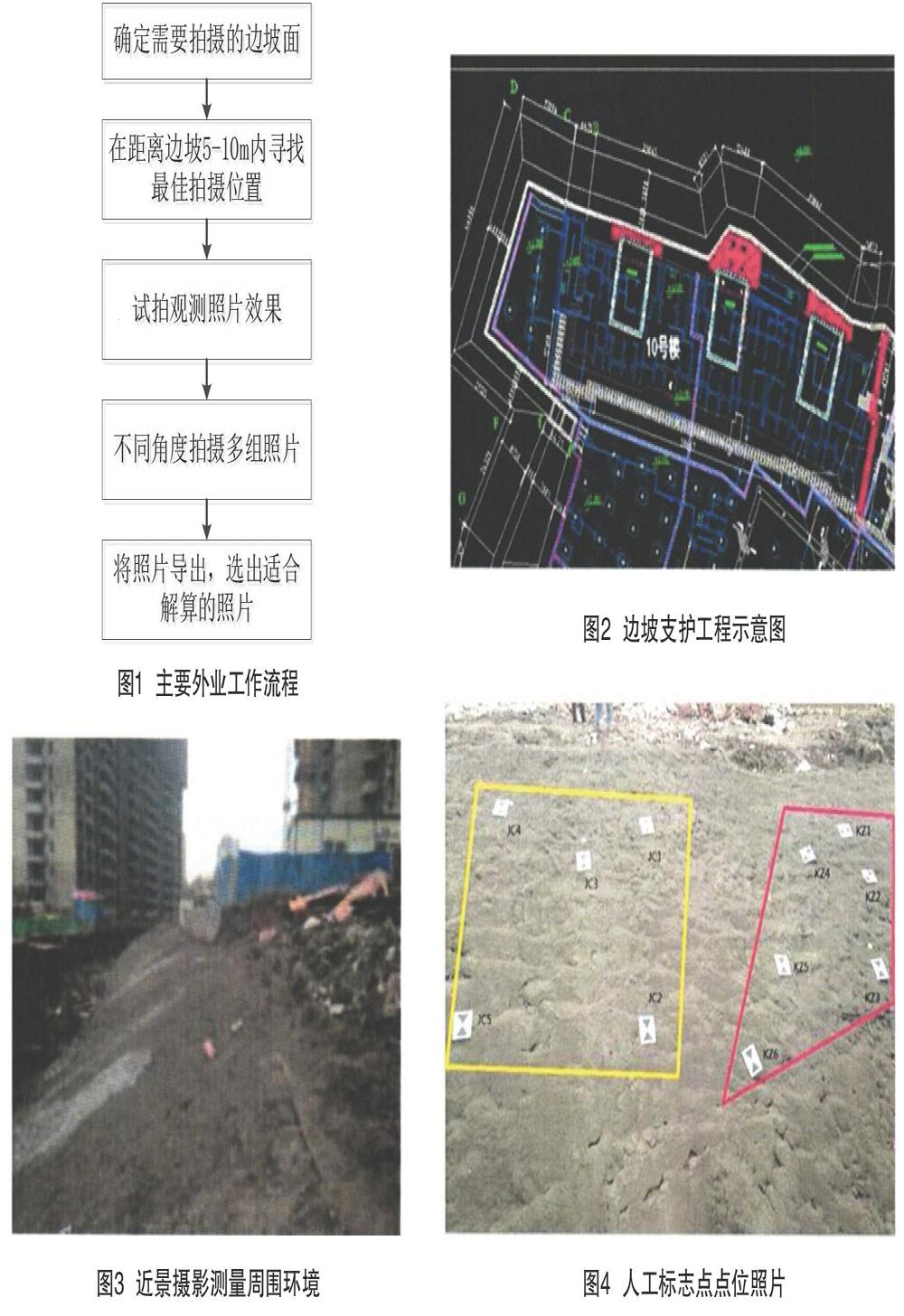
本次項目采用數碼相機的主要外業工作流程如圖1所示。
首先,確定攝影邊坡面。該基坑工程挖深為4.9~7.95m,屬于“坑中坑”工程,如圖2所示。即基坑內坑部分有混凝土鉆孔灌注樁和冠梁,外側邊坡為自然放坡,按照《建筑地基基礎設計規范》和《建筑基坑支護技術規范》,該基坑工程為二級。
根據現場要求,在采用傳統監測方法的同時,我們對基坑東北方部分放坡工程采用了近景攝影測量方法,監測部位的周圍環境圖如圖3所示。
按照上述設計方法,人工標記物的放置應合理,既不致密也不稀疏,以滿足我們攝影的要求,并且根據DLT算法的原理,不應放置標記物在同一平面上。
根據現場的實際情況和傳統長期監測的結果,一旦放置了標記,就可以知道在分布圖的右側,由于良好的地質條件,周圍沒有房屋。這些標記的底部沒有建筑物。現澆混凝土樁保留土體并配備冠梁,在施工過程中,邊坡位移在短時間內很小,可以忽略不計。因此,在右側,我們將選擇最右邊的6個點作為控制點。在左側,由于照片重疊,我們只需要測量點的坐標并使用GPS進行測量即可。
GPS測量點有很多空間數據方法。在此監視中,CORS用于測量點數據。在整個攝影測量過程中,GPS-CORS僅用于測量控制點的坐標并在以后進行比較,這是一種輔助方法。所以在這里,我將不作詳細介紹。
測量控制點的坐標后,請在現場拍照。因為設計平面很大,并且如果只拍攝一張正面照片,則標記點將顯得太小,這不利于我們提取特征點和后續操作,因此我們選擇拍攝兩個照片,左邊一張,左邊一張(根據DLT計算原理,要計算系數需要兩張照片。這里提到的照片是計算出的兩張照片),左邊兩張照片匹配程度確保后期的順利處理。
2? 內業解算
拍攝完照片以后,一次監測的外業就此結束,下面將進行近景攝影測量內業處理。
我們選取拍攝照片中清晰度最高,效果最好的一組照片進行內業解算。按照本次工程實例的解算步驟,我們選擇從已知控制點坐標最多的右側開始進行解析計算,首先,選取右側A時點一組照片中的一張,如圖4所示。
圖中,將人工標志點分為兩類,一類是已知點,即控制點,用KZ表示;一類是未知點,即監測點,用JC表示。在照片中的各人工標志點位情況如圖4所示。
(1)選取特征點。
為保證近景攝影測量的高精度,第一步應進行特征點的選取。首先,需要將拍攝的彩色照片轉變成灰色,用編寫的單一灰度程序對所拍攝照片進行灰度處理,灰度波段可以選擇1、2、3,依次代表紅波段、綠波段、藍波段。
照片上的每個像素僅對一種顏色進行采樣,得到的圖像稱為灰度圖。灰度圖像只顯示白色、黑色及從白色至黑色的每種級別的中間灰度,如白色(255,255,255),中間灰度(10,10,10)、(150,150,150)、(200,200,200)......和黑色(0,0,0),灰度圖像與黑白圖像不同,在黑白圖像中只有兩種取值,即黑色(0,0,0)和白色(255,255,255)兩種顏色。
灰度預處理分析后,我們分別選擇單一灰度模式下的1波段(紅波段)、2波段(綠波段)、3波段(藍波段)進行處理,得到三組波段灰度圖。
經過對以上的灰度圖像對比分析,可以看出,紅被段處理后,標志物在照片中最為突出,相對于綠波段和藍波段兩種灰度處理,其對提取特征點最為方便,所以,在后續工作中,我們將選擇紅波段對所有照片進行衷度處理。灰度處理以后,我們將對得到的灰度圖像進行特征點的選取,在特征點選取中,采用Forstner箅子運算。
(2)數據導入及計算。
在得到特征點效果圖以后,將進行照片的解析處理,解算像點的空間坐標把最佳特征點效果圖導入至點位計算界面中,解析計算出10個監測點的空間坐標。在B時點我們選擇了同樣的方法對該基坑邊坡進行了監測,處理過程和A時點的方法一樣,在這里就不再贅述。
3? 位移計算
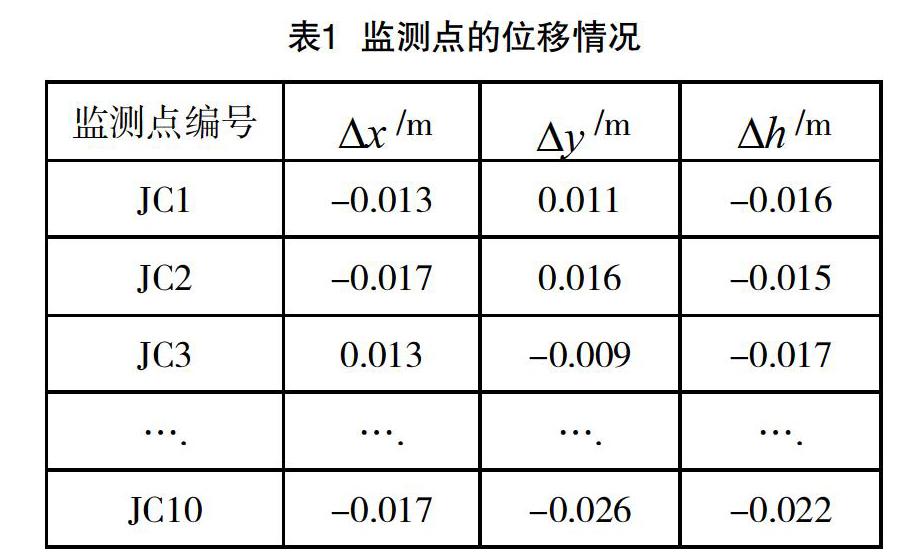
根據A、B兩個時點的監測點的空間坐標,解析處理可得到在這段時期內監測點的位移情況如表1所示。
由表1中可以看出,右側點JCl~JC5位移相對較小,主要原因是右側測量點處靠近冠梁和混凝土灌注樁,邊坡相對穩定;而左側部位為自然放坡,放坡的高差較大,位移相對較大。考慮到精度,由《建筑邊坡工程技術規范》可得,二級基坑在施工期,相對于工作基點的外部變形監測精度,平面是±3~5mm,高程是±5mm,右側點位計算精度高,左側精度采用右側解算坐標為控制點,精度稍低。
此次基坑監測采用的控制點坐標選取了基坑邊坡坡上的點位,基坑上的控制點坐標是會隨著基坑邊坡的變形而發生變化的,為此,在每次使用近景攝影測量方法解算其余點位坐標之前,還需測得控制點坐標。若能拾取穩定的控制點,對于我們的外業工作將得到有效的減少,若我們能夠拾取控制點1~控制點6的空間坐標,對基坑的監測會有不錯的效果。本次監測項目由于實際情況,不能進入相關樓層測量控制點坐標,并沒有采用此方法。但是該方法對有邊坡外控制點的近景攝影測量監測不失為一種有效簡單的方法,其只需在項目初采用傳統測量方法測算一次控制點坐標,之后的外業只需拍攝照片,同時,測量精度也能得到更好的提高。
參考文獻
[1] 侯剛棟,部晨光.數字近景攝影測量在文物考古領域中的應用[J].測繪技術裝備,2019(12):12-17.
[2] 袁家明.基于車載近景攝影測量的道路交通標線信息自動提取方法研究[D].南京:南京師范大學,2019.
[3] 楊松勇.近景攝影測量技術在露天礦邊坡變形監測中的研究[D].贛州:江西理工大學,2019.
[4] 丁影.平面約束的近景影像絕對定向方法及其精度[J].測繪科學,2020,45(3):74-80.
[5] 陳嘉穎.基于近景攝影測量技術的瀝青路面紋理實時識別系統[J].東南大學學報:自然科學版,2019,49(5):973-980.
[6] 楊冬.一種針對近景攝影測量的相機標定方法[J].經緯天地,2019(3):79-84.