基于遺傳算法的電靜壓伺服系統模型參數辨識
2020-03-27 08:15:10張春龍趙迎鑫郝偉一
導彈與航天運載技術 2020年1期
張春龍,趙迎鑫,張 朋,郝偉一,馮 偉
基于遺傳算法的電靜壓伺服系統模型參數辨識
張春龍,趙迎鑫,張 朋,郝偉一,馮 偉
(北京精密機電控制設備研究所,北京,100076)
為了優化模型仿真的控制系統參數,針對電靜壓伺服系統(Electro-Hydrostatic Actuator,EHA),建立控制器、電機、液壓作動器模塊化模型,根據各模塊輸入輸出量的試驗數據,采用最小二乘法對系統模型參數進行辨識,并將辨識結果導入遺傳算法的初始種群,進一步對系統模型參數進行優化,得到系統的精確模型。結果表明,優化的辨識結果在時域和頻域都更為精確的逼近實際系統,匹配程度在90%以上,證明該方法的可行性。
電靜壓伺服;遺傳算法;最小二乘法;參數辨識
0 引 言
電靜壓伺服系統(Electro-Hydrostatic Actuator,EHA)作為功率電傳的一種基本實現形式,因其重載能力強、效率高、抗污染能力強、易冗余等突出特點,是未來多電化航天運載器大功率推力矢量控制作動系統的主流方案[1,2]。
由于集成了電機伺服控制和液壓流體傳動,系統具有很強的非線性[3]。電靜壓伺服系統是一個典型的高階系統,為提升動靜態特性,通常設計復雜的控制策略,也因此需要更為準確的系統模型。目前,國內外已有眾多高校及科研院所進行電靜壓伺服技術相關研究工作,采用的系統模型大多基于理論設計參數和各種線性假設[4~6],模型仿真結果與系統實際測試結果的一致性不容易保證。為搭建契合實際系統特性的仿真模型,本文采用系統辨識方法辨識模型參數,在最小二乘辨識基礎上引入遺傳搜索對系統辨識結果進行優化。首先建立電靜壓伺服系統控制器、電機、液壓作動器模型,再基于各模塊輸入輸出量,采集試驗數據,采用最小二乘法對模型參數進行辨識,再將辨識結果放入初始種群,利用遺傳算法對辨識結果進行優化。分別在時域與頻域內,對比模型仿真結果與系統實際測試結果,表明辨識結果實用、準確度高,可為高性能控制策略設計提供更精確的模型。
調查顯示:寧夏圖書館A卡讀者所占比例最大,用卡最為頻繁,押金的性價比最高,基本能滿足14歲及以上年齡的讀者的閱讀需求,且未滿14周歲的讀者也可由其父母使用A卡讀者證外借少兒圖書。
1 系統原理
電靜壓伺服系統通過控制伺服電機泵的轉速和轉向控制活塞桿的位移輸出,原理如圖1所示。控制器接收位置指令并和位移反饋信號進行比較和性能補償,向驅動器發出轉速指令信號,對電機泵的轉速和轉向進行控制,從而控制作動器的流量。增壓油箱與單向閥構成補油系統,高壓安全閥起保護作用,旁通閥用來滿足作動筒零位調整的需要。樣機設計參數如表1所示。
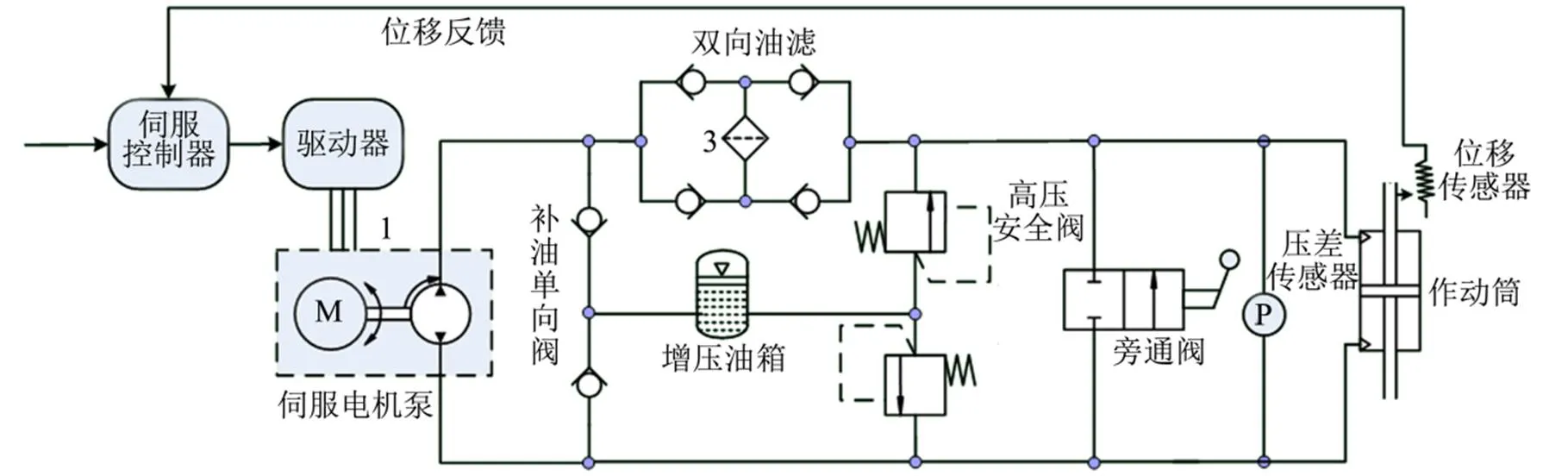
圖1 電靜壓伺服系統原理
表1 樣機設計參數
Tab.1 Setting Parameter of EHA Prototype
序號參數數值 1伺服電機泵工作電壓/V270(DC) 2伺服電機泵最大轉速/(r·min-1)18000 3伺服電機泵最高工作壓力/MPa21 4最大速度/(mm·s-1)250
2 系統模型分析


圖2 電靜壓伺服系統框圖
2.1 電機模型
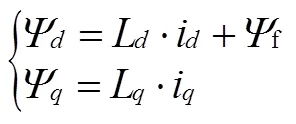
為簡化電機模型結構,假定電機定子繞組三相對稱,忽略轉子阻尼,忽略磁路飽和磁滯渦流的影響,忽略氣隙磁場的高次諧波分量,基于Clark變換和Park變換,可以得到電機在--同步旋轉坐標系下的磁鏈方程:
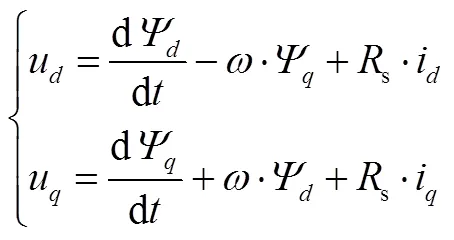
電壓方程:
考慮噪聲的影響,則,
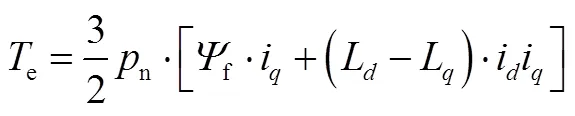
電磁轉矩方程:
泵流量方程:
對式(1)~(4)進行拉氏變換,可得電機速度閉環模型框圖,如圖3所示。
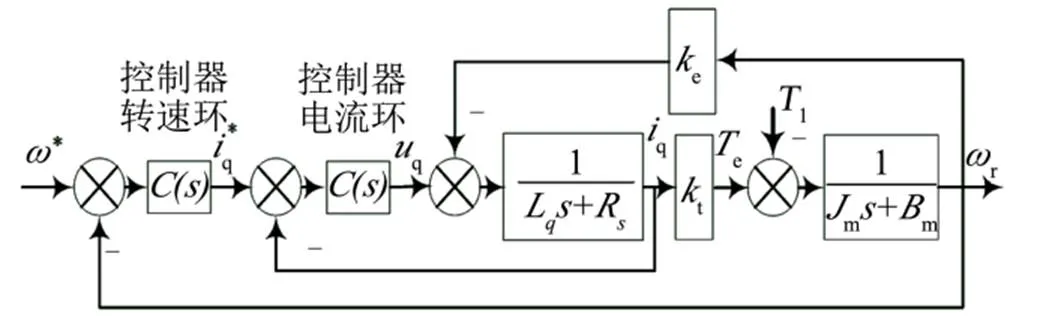
圖3 電機模型框圖
(2)資產處置還是采取傳統的線下處置流程,還未形成系統的線上信息化處置流程,科室人員需輾轉多個部門簽字完成申請,不利于資產處置工作效率的提高。
2.2 泵和作動器模型
為研究液壓作動器自身特性,排除負載影響,此處采用空載數據,辨識摩擦等因素對作動器的影響。
液壓作動器包括泵和作動筒,不考慮補油動態和油液溫度變化影響,可得:
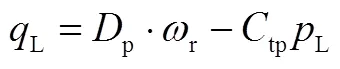
液壓缸流量方程:
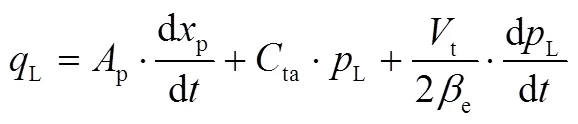
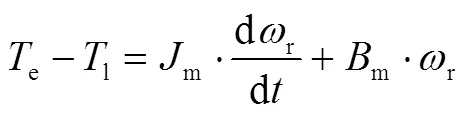
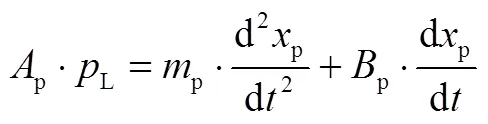
活塞缸受力平衡方程:
2.2.1 錫伯民族博物院。錫伯民族博物院位于察布查爾縣孫扎齊鄉境內,是國家4A級景區,博物館以靖遠寺為中心,距縣城5 km,占地面積49 460 m2,是集錫伯民族歷史文化展示、觀光旅游、休閑度假等于一體的多功能綜合旅游區。錫伯族悠久的歷史文化和民族風情在這里形成獨具風格的旅游特色,為游客呈現出“世界唯一,唯我獨有”的魅力。
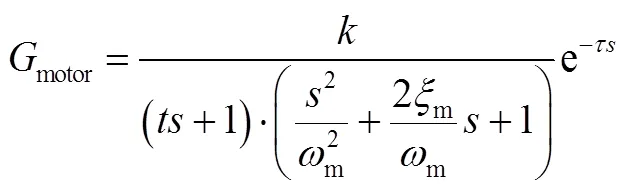
忽略復雜高頻成分以及干擾因素的情況下,根據文獻[7]和文獻[8],電機轉速閉環特性可以由典型Ⅱ型系統或2階系統表征。考慮電氣系統的控制延遲,加入延遲環節。電機模型表示為
對式(5)~(7)進行拉氏變換可得液壓作動器模型框圖,如圖4所示。
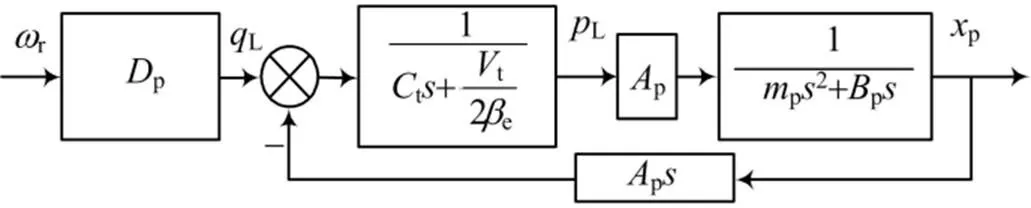
圖4 泵和作動器模型框圖
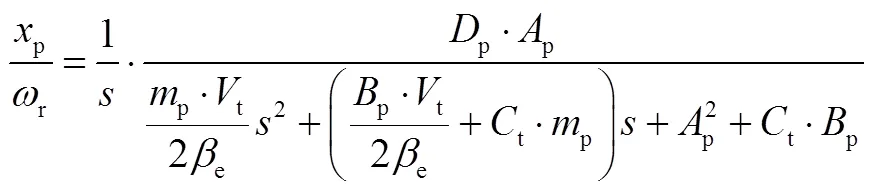
因此,泵和作動器模型可表示為
初稿完成后,對照腳本用相關儀器再實際操作幾次,記下每一步之后會出現什么樣的界面和提示,再修改腳本,然后定稿。
其中,
泵和作動器的設計參數如表2所示。
表2 泵和作動器基本設計參數
Tab.2 Design Parameters of the Pump and Actuator
序號參數數值 1伺服電機泵排量Dp/(mL·r-1)3.18 2作動器活塞面積Ap/mm24396 3作動筒總容積Vt/m33.34×10-4 4油液彈性模量/Pa1.47×109
3 模型參數辨識方法
最小二乘法是參數辨識領域中最基本、應用最為廣泛的方法[9],其基本形式如圖5所示。
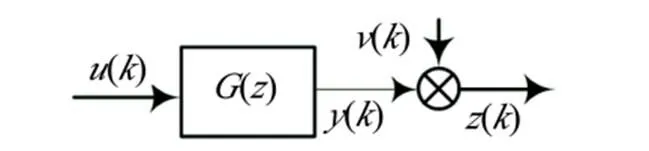
圖5 SISI離散系統
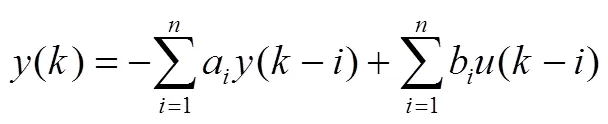
差分方程形式為
然而,有人把這次來船廠和第三次來船廠混同一起,應是對《明英宗實錄》卷四的誤讀。雖然《明實錄》在阮堯民與劉清帶兵松花江造船并捕海東青的記述一致,但宣德七年五月丙寅條,記述的是“軍士未還者五百余人”,并最終由地方官吏從女真人那里基本索回。而宣德十年四月辛酉條,記述的是“騎卒死亡者八九百人”,起因是在與女真人貿易中殺傷其人,阮堯民帶兵在歸途上受到憤怒的女真人的一路攻擊,造成“騎卒死亡者八九百人”。明顯是互不相干的兩件事,時間也相差三年。如果是宣德四年(1432)發生的“騎卒死亡者八九百人”,巫凱不可能三年后才發現并將此事上奏朝廷。
在本次研究中采用德國西門子公司S2000彩色多普勒超聲儀,儀器的參數設定參照常規指標。在具體階段,要求工作人員做好成像分析工作,頸前區的暴露對于分級處理有一定的影響,要求從上到下進行動態掃描處理,結合病灶組織和切面情況觀察。
圖7為4種辨識結果的時域響應曲線,4條仿真曲線與實際轉速變化曲線較為接近,仿真曲線之間的差別主要在于最大轉速段,其它階段基本一致。

(2)察汗烏蘇河地區1∶25 000地球化學測量圈定綜合異常60個,顯示異常元素種類多,元素組合明顯,異常強度高,濃集中心明顯,為后期找礦工作提供了較為詳實的地球化學資料。
文獻[9]對最小二乘辨識以及遺傳算法辨識進行了仿真對比驗證,表明遺傳算法辨識能得到比最小二乘辨識更優的結果,因此,在最小二乘辨識結果的基礎上,引入遺傳搜索算法,以期對辨識結果進行優化。
遺傳算法基本步驟如圖6所示。
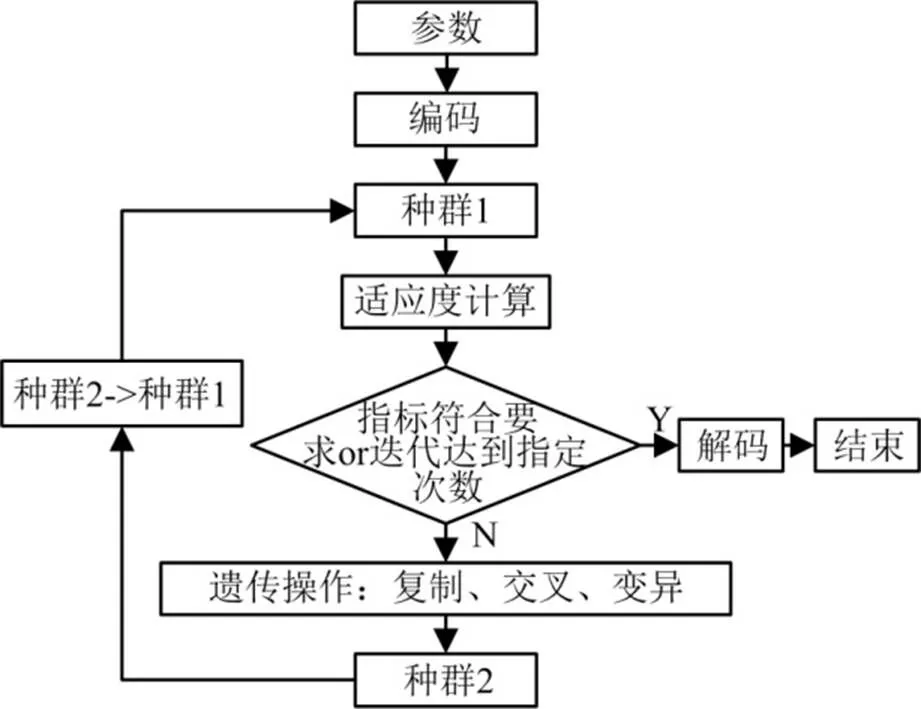
圖6 遺傳算法流程
確定待辨識參數并給出其約束條件以及適應度計算方法,而后對參數進行編碼,產生初始種群,按照圖6所示的步驟不斷迭代,直至目標函數符合條件或迭代次數達到預定值遺傳搜索結果具有一代優于一代的特性,可以對最小二乘法辨識結果進行優化。根據最小二乘辨識結果估計參數遺傳搜索的范圍,將最小二乘辨識獲得的參數結果放入遺傳搜索的初始種群,可保證遺傳搜索的最終結果優于最小二乘辨識結果。
其中表示第t級回歸后的特征點分布,Rt表示第t級回歸器的更新量,I表示待檢測人臉圖像,h為HOG特征提取算子。算法的具體流程框圖如下圖6所示。
4 參數辨識與試驗
對表達思想感情強烈的課文,教師應多花點精力,指導學生進行表情朗讀,以讀激情,引起共鳴。《再見了,親人》一文的語言感情充沛,運用了比較多的祈使句、感嘆句等句式,來表達贊美、感激、關切、崇敬等感情內容,字里行間洋溢著中朝人民的深情厚誼。教學時,為了讓學生體會這種感情,我指導學生朗讀重點句、重點片斷,通過齊讀、指名讀、默讀、輕聲讀等,從多次反復的朗讀中激發他們的感情,從而體會到中朝人民的友誼確實是比山還高比海還深,是用鮮血凝成的。

4.1 電機模型參數辨識
轉矩平衡方程:
表3 辨識結果目標函數值
Tab.3 Values of Cost Function for Identification Results
G(s)方法最終目標函數值 2階最小二乘法3.8768×105 遺傳算法3.5948×105 3階最小二乘法4.1842×105 遺傳算法3.5444×105
從目標函數值可以看出,在最小二乘辨識結果的基礎上進行遺傳搜索得到的參數,優于最小二乘估計結果。目標函數值的數值整體上較大,是因為在極限轉速段,實際轉速在一定范圍內波動,與線性模型結果差異較大,這是由實際系統中電機的負載轉矩變化等未建模因素的存在導致的。3階模型遺傳算法辨識結果與實測曲線在電機轉速的上升段還是較為一致的,表明模型能較好地表征電機轉速閉環動態特性。
(2)提高健身健美指導員的專業素質和服務意識。要及時對健身指導員進行培訓進修學習新的訓練方法和思想理念,還應要求教練與學員和會員間的交流,定期或不不定期開展活動,以便交流,提高欣賞的水平。[2]
基于國內學者的主要研究區域是全國范圍內的,而山東省作為農業大省則具有代表性。故而本文不僅對農產品價格和CPI之間的傳導機制進行理論關聯性分析,還利用山東省2006年一季度至2017年三季度的CPI和API季度數據建立VAR模型進行實證研究,以期根據研究結論對穩定山東省農產品物價水平提出合理的建議。
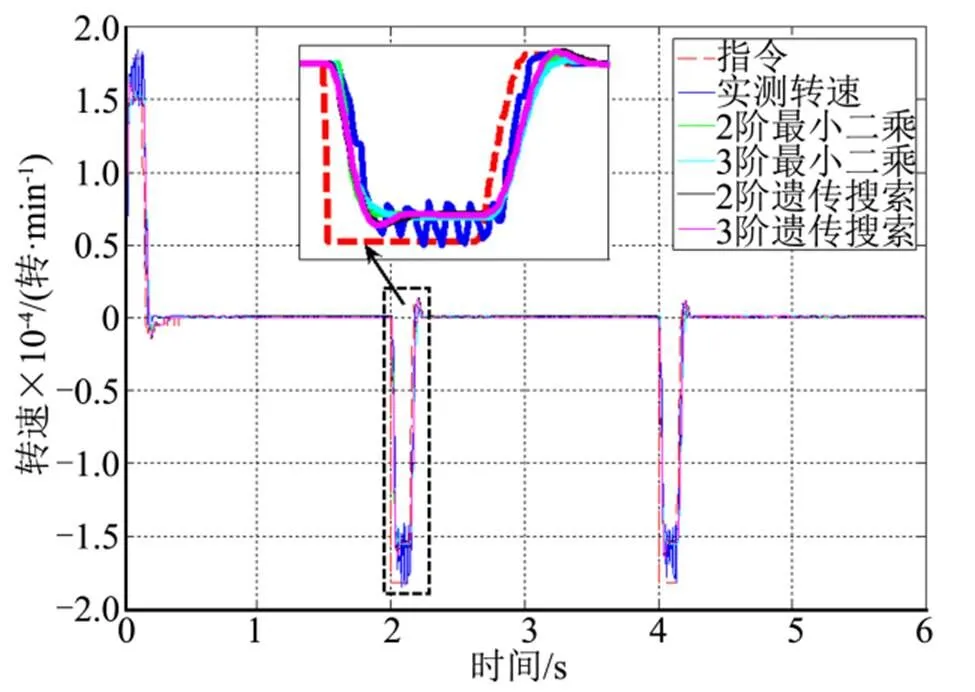
圖7 電機辨識結果時域特性
4.2 泵和作動器模型參數辨識
表4 泵和作動器模型辨識結果
Tab.4 Identification Results of the Pump and Actuator Model
方法目標函數值結果 最小二乘0.3902 遺傳算法0.3526
圖8給出了表4中的2種參數結果各自的時頻域特性,并同時給出只保留積分環節情況下的時頻域的仿真特性曲線。
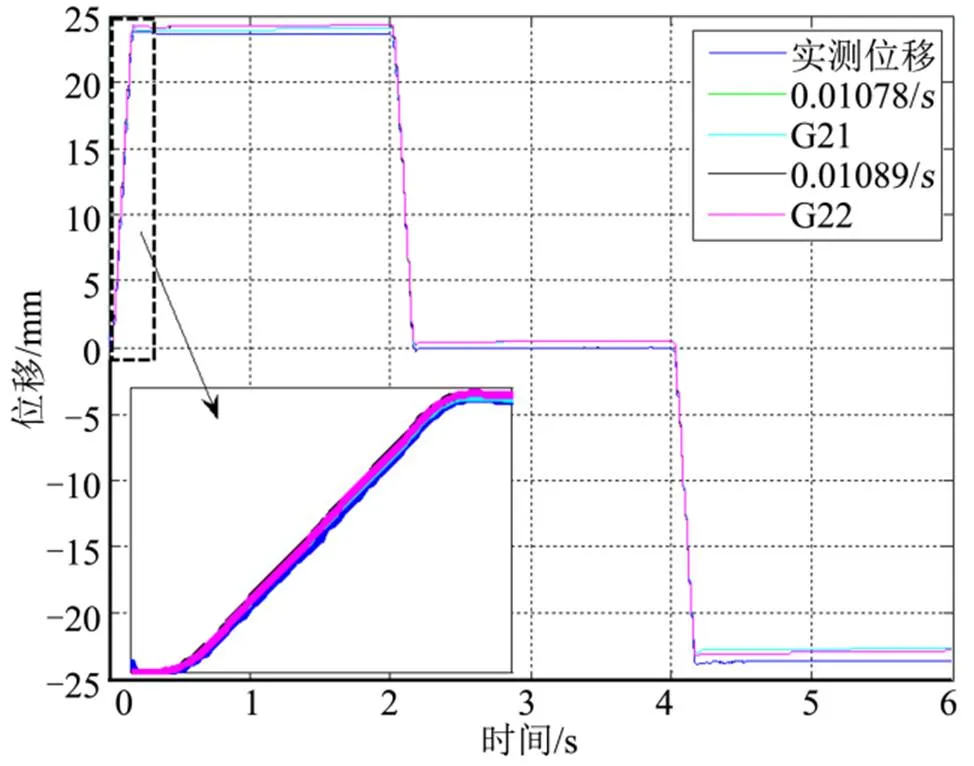
a)時域響應實測與仿真結果對比
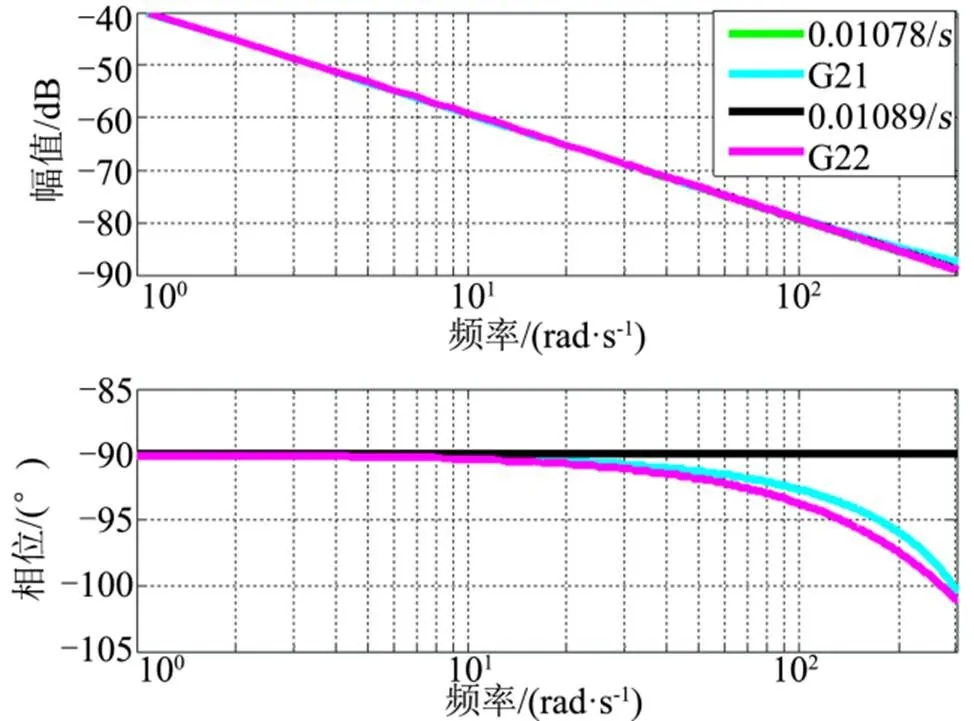
b)4種模型頻率特性對比
續圖8

4.3 整體位置閉環特性
學校始終堅持以提高教學質量為第一宗旨,以服務學生為第一要務。建校以來,學校高考升學人數逐年增加,升學率逐年提高。在學生藝體專業素質的挖掘和培養方面,接連取得較好成績,學校在各級各類藝術競賽中不斷創造佳績的基礎上,每年向高校輸送了一定數量的藝體特長生。
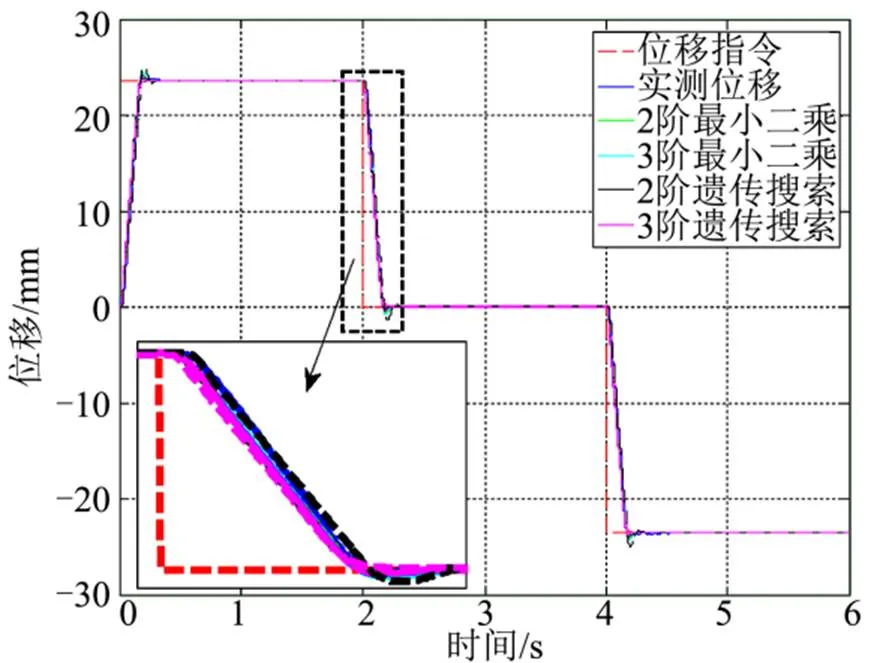
a)階躍響應曲線
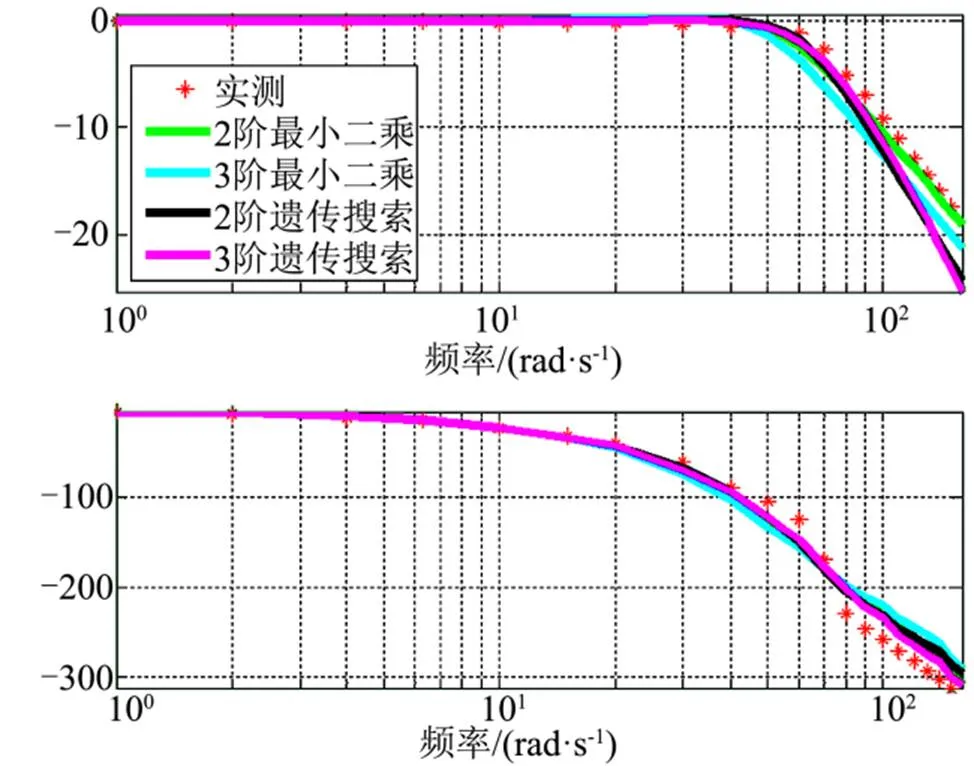
b)頻率特性曲線
續圖9
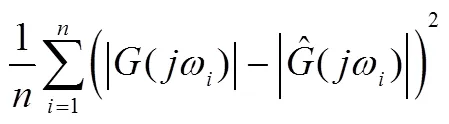
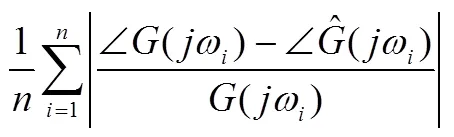
頻域擬合誤差具體結果如表5所示。
表5 頻域特性擬合誤差
Tab.5 Fitting Error of Frequency-domain Characteristic
方法最小二乘法遺傳搜索 2階3階2階3階 幅頻誤差0.00370.01180.00480.0035 相頻誤差10.8%13.3%9..9%8.9% -3dB帶寬差14.9%23.0%10.8%10.8%
圖9a表明,采用不同的參數辨識方法得到的系統模型,其階躍響應差別不大,且均與實際試驗數據一致度較高。從圖9b及表5可以看出,頻域上,3階遺傳搜索仿真結果最為接近系統實測結果。綜上所述,在最小二乘辨識結果上進行遺傳搜索獲得的參數結果確實優于最小二乘辨識結果,最終結果對實際系統的擬合誤差基本在10%,工程應用中可以接受。
5 結 論
本文通過線性化分析確定電靜壓伺服系統模型結構,提出在最小二乘辨識基礎上使用遺傳算法優化辨識結果的辨識方法,對電靜壓伺服系統模型參數進行辨識。時頻域內模型仿真與試驗數據的比較結果表明,該方法得到的系統模型能準確地表征實際系統特性,為控制策略設計提供支撐。
[1] 付永領, 等. 電動靜液作動器設計方法綜述[J]. 北京航空航天大學學報, 2017, 43(10): 1939-1952.
Fu Yongling, et al. Review on design method of electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 1939-1952.
[2] Nicolas L. AIRBUS research and perspectives for aircraft control actuation[C]. Toulouse: 8th International Conference on Recent Advances in Aerospace Actuation Systems and Components, 2018.
[3] Yang L. Controller design for hydraulic position control systems[D]. Saskatoon: University of Saskatchewan, 2011.
[4] 習仁國, 劉衛國, 陳煥明. 電靜液作動器的建模仿真與試驗研究[J]. 機床與液壓, 2013, 41(19): 40-44.
Xi Renguo, Liu Weiguo, Chen Huanming. Modeling simulation and experimental research on Electro-Hydrostatic Actuator(EHA)[J]. Machine Tool & Hydraulics, 2013, 41(19): 40-44.
[5] 楊鐘鼎, 等. 變速積分PID法控制的電靜液作動器的設計與仿真[J]. 江蘇科技大學學報(自然科學版), 2017, 31(3): 321-326.
Yang Zhongding, et al. Design and simulation variable speed integral PID control method of electro hydrostatic actuator[J]. Journal of Jiangsu University of Science and Technology(Natural Science Edition), 2017, 31(3): 321-326.
[6] Pachter M, Houpis C, Kang K. Modeling and control of an electro-hydrostatic actuator[J]. International Journal of Robust and Nonlinear Control, 1997, 7(6): 591-608.
[7] 張玉強. 大功率電靜壓伺服機構動態特性研究[D]. 北京: 中國航天科技集團公司, 2016.
Zhang Yuqiang. Dynamic characters of high power electro hydrostatic actuator[D]. Beijing: CASC, 2016.
[8] 陳伯時. 電力拖動自動控制系統——運動控制系統(第3版)[M]. 北京:機械工業出版社, 2003.
Chen Boshi. Automatic control of electrical drives: actuation control system 3rded[M]. Beijing: China Mechine Press, 2003.
[9] 劉金琨. 系統辨識理論及Matlab仿真[M]. 北京: 電子工業出版社, 2013.
Liu Jinkun. System identification theory and Matlab simulatioin[M]. Beijing: Publishing House of Electronics Industry, 2013.
Model Parameter Identification of an Electro-Hydrostatic Actuator Base on Genetic Algorithm
Zhang Chun-long, Zhao Ying-xin, Zhang Peng, Hao Wei-yi, Feng Wei
(Beijing Institute of Precision Mechatronics and Controls, Beijing, 100076)
An Electro-Hydrostatic Actuator (EHA) model, including a controller, a motor and a hydraulic actuator is constructed. The inputs and outputs of each block are recorded when testing the EHA prototype, based on which the model parameters are identified. The Least Square Identification is performed at first, whose parameters identification result is introduced into the initial group of a Genetic Algorithm Identification to get optimized. It is shown that this method is practicable, for the model with parameters from the optimized identification result matched the real system better, with over 90% similarity, both in time domain and frequency domain.
electro-hydrostatic actuators; genetic algorithm; least square identification; parameter identification
TP391
A
1004-7182(2020)01-0072-06
10.7654/j.issn.1004-7182.20200113
2019-10-24;
2019-11-01
張春龍(1995-),男,碩士研究生,主要研究方向為流體控制及自動化。
趙迎鑫(1974-),男,研究員,主要研究方向為電液伺服系統研究和設計。
5)給排水控制系統運行中通過對PLC實際作用的充分發揮,可實現水位信號的自動檢測,從而得到準確性良好的供水井涌水量判斷分析結果,進而實現對水泵運行中的有效調度[2]。
張 朋(1984-),男,工程師,主要研究方向為電液伺服系統研究和設計。
郝偉一(1989-),男,工程師,主要研究方向為電液伺服系統研究和設計。
馮 偉(1992-),男,工程師,主要研究方向為電液伺服系統研究和設計。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
