基于標定板的協作機器人Denavit-Hartenberg參數標定研究*
2020-03-24 03:27:24劉瑞超
機械制造 2020年3期
□ 劉瑞超 □ 張 波
上海交通大學 機械與動力工程學院 上海 200240
1 研究背景

在主流的辨識方法中,需要使用激光測量儀和視覺傳感器等進行標定,這樣做的缺點是所需設備昂貴,操作復雜[1-3]。
筆者以微分運動的思路,優化運動學誤差模型的計算方法,并通過仿真驗證這一方法的有效性。與此同時,筆者針對協作機器人的特點,提出一種基于標定板的協作機器人DH參數標定方法,設備簡單,通用性強,方法簡便。通過模型仿真和試驗,驗證了這一標定方法的可行性和可操作性[4-5]。
2 運動學誤差模型及算法優化
筆者研究的機器人為上海交通大學機器人研究所研發的六自由度協作機器人。使用DH參數法對協作機器人進行建模,協作機器人各連桿坐標系如圖1所示。其中,基座坐標系三個坐標方向為X0、Y0、Z0。協作機器人模型DH參數見表1,其中,αi為相鄰關節軸夾角,ai為連桿長度,di為連桿偏距,θi為關節轉角,i為連桿編號,i=1,2,3,…,6。
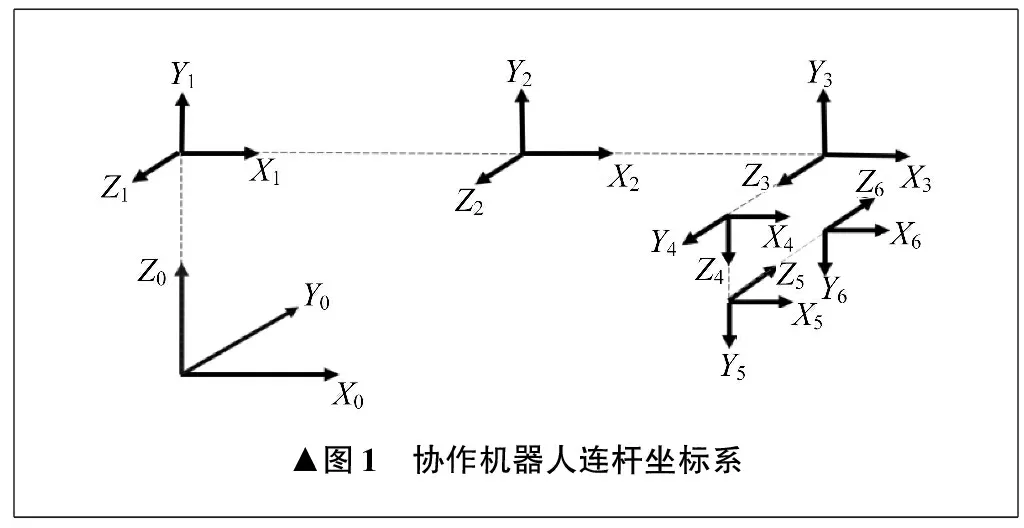
▲圖1 協作機器人連桿坐標系
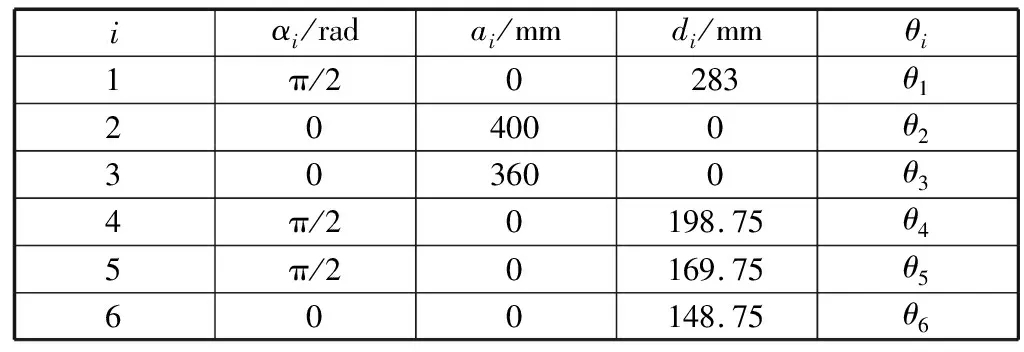
表1 協作機器人模型DH參數
根據文獻[2]中的經典機器人DH參數法,得到連桿i坐標系相對于連桿i-1坐標系的齊次變換矩陣i-1Ti。協作機器人末端坐標系相對于基座坐標系的齊次變換矩陣0T6為:
0T6=0T11T22T33T44T55T6
(1)
現有的誤差模型一般在式(1)基礎上取微分,以獲得0T6中各個元素與DH參數之間的誤差傳遞關系。由于每個齊次變換矩陣相乘存在正余弦函數耦合,因此微分的解析表達式很復雜。筆者在非線性方程線性化的基礎上,將微分運動及其運動旋量與DH參數法相結合,提出一種可以快速求解得到誤差傳遞關系的新算法。當DH參數存在偏差時,連桿i坐標系相對于連桿i-1坐標系,齊次變換矩陣的偏差為Δi-1Ti;協作機器人末端坐標系相對于基座坐標系,齊次變換矩陣的偏差為Δ0T6。在忽略矩陣偏差二階小量的前提下,可以得到:
=0T6+Δ0T1·1T22T33T44T55T6+0T1
·Δ1T2·2T33T44T55T6+…
+0T11T22T33T44T5·Δ5T6
(2)
應用齊次變換矩陣T的正交性,可以快速求解出逆矩陣T-1[6]。齊次變換矩陣的偏差可以認為由齊次變換矩陣的微分運動所產生,根據文獻[7]闡述的坐標系微分運動與坐標系角速度矢量ω、速度矢量v之間的關系,得到:
(3)
(4)
式中:ΔT為齊次變換矩陣T的偏差;δT為齊次變換矩陣T的微分變換矩陣;ω1、ω2、ω3依次為角速度矢量ω沿坐標系X0軸、Y0軸、Z0軸的三個分量;v1、v2、v3依次為線速度矢量v沿坐標系X0軸、Y0軸、Z0軸的三個分量;γ為由角速度矢量和線速度矢量組成的運動旋量。
(5)
式中:i-1γi為齊次變換矩陣i-1Ti微分運動的運動旋量;i-1ωi和i-1vi分別為齊次變換矩陣i-1Ti微分運動的角速度矢量和速度矢量;Δαi為相鄰關節軸夾角偏差;Δai為連桿長度偏差;Δdi為連桿偏距偏差;Δθi為關節轉角偏差;ΔXi為第i個連桿的DH參數矢量偏差;i-1Li為第i個連桿DH參數偏差與運動旋量i-1γi之間的關系傳遞矩陣。
對式(2)等號兩側消去0T6,即等號兩側同時乘以0T6-1,可以得到:
(6)
式中:0γ6為在基座坐標系下協作機器人末端坐標系微分運動的運動旋量;Ad(j-1Tj)為李代數群中對齊次變換矩陣j-1Tj的伴隨變換[8];j為連桿編號中間變量,j=1,2…,i。
結合式(5)和式(6),由運動旋量中提取協作機器人末端位置誤差矢量[9],得到:
ΔX=J·ΔX
(7)
(8)
式中:p1、p2、p3依次為協作機器人末端位置矢量p在X0軸、Y0軸、Z0軸三個方向上的分量;Δp為協作機器人末端位置誤差矢量;p∧為由協作機器人末端位置矢量p生成的反對稱矩陣;I3為三階單位對角矩陣;ΔX為協作機器人DH參數矢量偏差;J為雅可比矩陣。
筆者通過將運動旋量與DH參數相結合,推導出了協作機器人DH參數標定所需的雅可比矩陣J的快速計算方式。
3 DH參數標定算法仿真
采用最小二乘法對協作機器人的DH參數進行標定[10]:
(9)
在求解雅可比矩陣J的過程中,采用了線性化方法對非線性模型進行簡化,需要使用最小二乘迭代法修正DH參數,使修正后的DH參數接近實際DH參數。
通過仿真驗證DH參數標定迭代算法的有效性。首先在協作機器人模型DH參數附近選取一組數據,作為協作機器人的實際DH參數,見表2。然后通過隨機數生成36組關節角度,分別計算出協作機器人末端的理論位置和實際位置,獲得位置誤差矢量Δp。最后根據關節角度、協作機器人DH參數和協作機器人末端位置,由式(7)計算雅可比矩陣J。
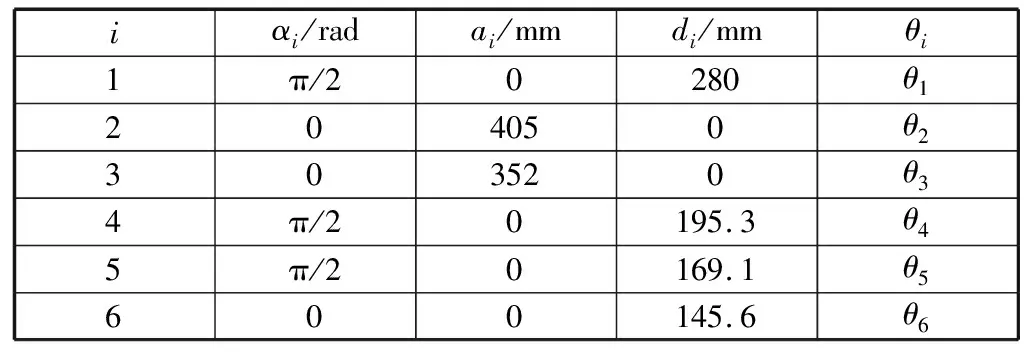
表2 協作機器人實際DH參數
通過最小二乘法迭代十次,協作機器人修正后的DH參數見表3。對比表2和表3數據,修正后的DH參數非常接近仿真中選取的協作機器人實際DH參數。繪制在每次迭代過程中Δp的二范數變化情況,如圖2所示。由圖2可以看出,Δp的二范數快速收斂至0。首次迭代后Δp的二范數為0.06 m,第十次迭代后為1×10-7m。在標定后,協作機器人末端位置精度提高99.9%。這一仿真結果驗證了筆者提出的基于微分變換的DH參數標定方法的有效性。
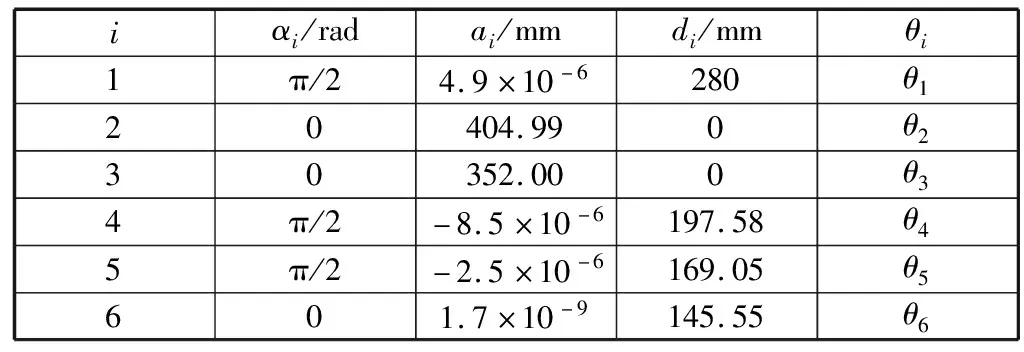
表3 修正后協作機器人DH參數
4 標定板設計
協作機器人具有良好的人機交互特性,在協作機器人使用過程中,可以手動拖動協作機器人的末端至所需要的位置。應用協作機器人的這一特性,筆者設計了用于協作機器人DH參數標定的標定板,如圖3所示。在標定板上,有一些直徑一致的圓孔,這些圓孔可以與協作機器人末端法蘭緊密貼合。在標定過程中,操作者可以將協作機器人末端拖動至標定板的不同孔位中。
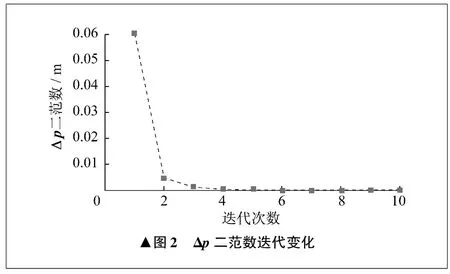
▲圖2 Δp二范數迭代變化
由于協作機器人底座與標定板通過兩個固定銷固定,保證了協作機器人底座與標定板之間的相對位置關系為唯一確定,標定板上每個圓孔在機器人基座標系中的位置均可以通過標定板的幾何尺寸獲得。在標定過程中,操作者不需要使用激光跟蹤儀或高精度相機對協作機器人末端進行位置測量。標定板的使用極大簡化了協作機器人DH參數標定的操作過程。
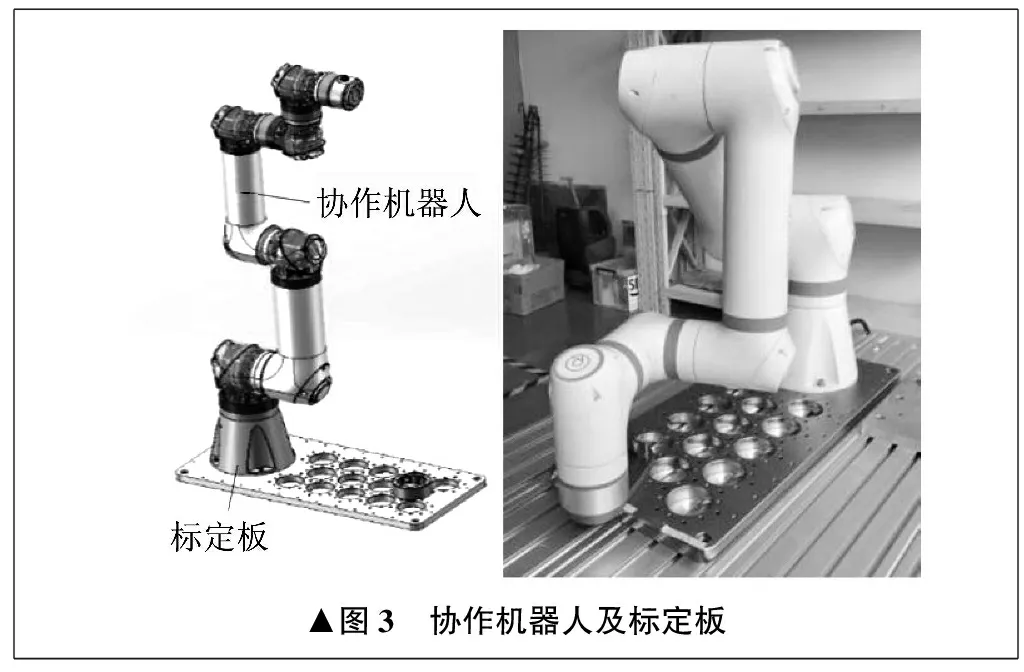
▲圖3 協作機器人及標定板
5 試驗驗證
在標定過程中,拖動協作機器人末端法蘭至標定板孔位中,讀取協作機器人各關節角度數據和末端位置數據,計算出位置誤差矢量Δp和雅可比矩陣J,便可對DH參數進行標定。為保證協作機器人的逆運動學求解有解析解,在試驗迭代修正的過程中,增加了保持DH參數中αi不變的約束條件。這一條件保證了在迭代過程中,協作機器人運動學模型相鄰關節保持絕對平行或絕對垂直的狀態。拖動協作機器人末端法蘭至標定板上12個圓孔,分別記錄各關節轉角,進行十次迭代后,得到試驗DH參數,見表4。
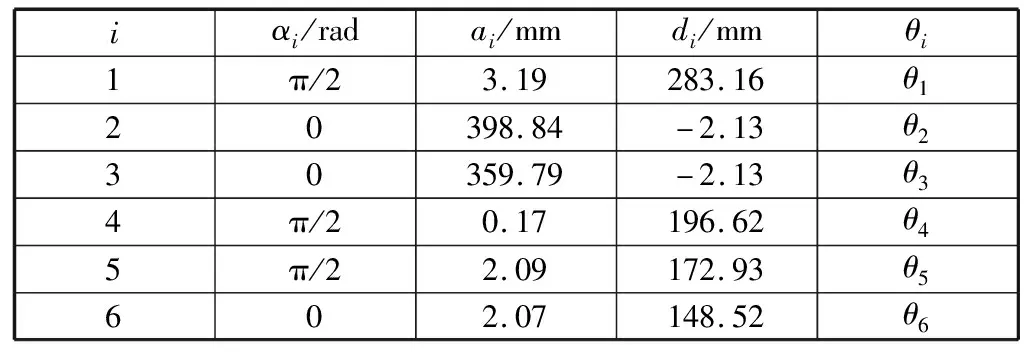
表4 協作機器人試驗DH參數
試驗過程中Δp的二范數隨迭代次數的變化情況如圖4所示。由圖4可以看出,第三次迭代后,Δp的二范數趨于穩定。第一次迭代時,Δp的二范數為0.045 m。第十次迭代后,Δp的二范數為0.007 3 m,末端位置精度提高84%。試驗驗證了筆者所提標定方法的有效性。
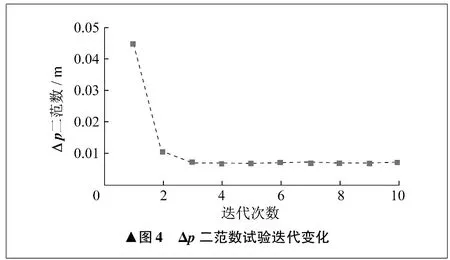
▲圖4 Δp二范數試驗迭代變化
為進一步驗證修正DH參數的可信性,在標定板中另外選取三個未納入標定數據采樣的圓孔。將協作機器人末端拖至這三個圓孔中,通過修正DH參數計算協作機器人的末端位置偏差,并與初始末端位置進行比較,結果見表5。

表5 協作機器人位置偏差比較 mm
由表5可以看出,使用修正DH參數后,協作機器人在標定板其它位置處的末端位置計算值與實際值偏差減小,偏差的二范數減小76%,進一步驗證了標定方法的有效性。當然,在精度上仍然還有較大的提高空間,造成這種現象的原因包括標定數據量太少、扭轉角變化約束限制等[11]。
6 結束語
筆者提出了一種基于微分變換的協作機器人誤差模型計算方法,避免了復雜的求導計算過程,提高了誤差模型的計算效率。在仿真中,通過有限次最小二乘法迭代后對DH參數進行修正,協作機器人末端位置精度提高99.9%。筆者針對協作機器人設計了一種標定板,用于對協作機器人DH參數進行標定。通過試驗中十次迭代計算,協作機器人末端位置精度提高了84%。這一基于標定板的協作機器人DH參數標定方法對協作機器人DH參數的實際應用具有參考價值。
