輕型機載激光雷達航測在公路勘測設計中的應用研究
2020-03-24 08:54:52邱澤瑋
資源導刊(信息化測繪) 2020年2期
關鍵詞:數據處理
邱澤瑋
(中晟地理信息有限公司,湖北 武漢 430070)
機載激光雷達(LiDAR)測量系統是集激光測距技術、GPS 技術和慣性導航(INS)技術于一體的集成技術,是當今勘察測量業(yè)界最先進的技術。隨著無人機低空航測技術的廣泛應用,將輕小型激光雷達測量系統搭配無人機航測設備進行工程勘測,兼具效率、精度及勘測成果的多元化。利用該技術可以實現高自動化、高機動性勘測,且成果生產的周期相對較短,測繪成果精度較無人機普通數碼航測高[1]。在成果種類上,與傳統野外勘測相比,能額外提供數字表面模型(DSM)、數字高程模型(DEM)、數字正射影像(DOM)及高精度點云。因此,在公路勘測設計中,為了提高勘測作業(yè)效率、提供多元化的勘測成果,要強化對輕型機載激光雷達航測技術的應用。
1 工程概況
1.1 測區(qū)概況
本文以南京至鹽城高速公路工程勘察設計項目NY-SJ-2 標為試驗對象。NY-SJ-2 標從高郵南(截止到京杭運河特大橋橋尾)至鹽靖高速(含鹽靖樞紐)約58 km。高郵—興化區(qū)段地貌區(qū)為里下河淺洼平原區(qū),地貌單元為淺洼平原。測區(qū)范圍如圖1 所示。
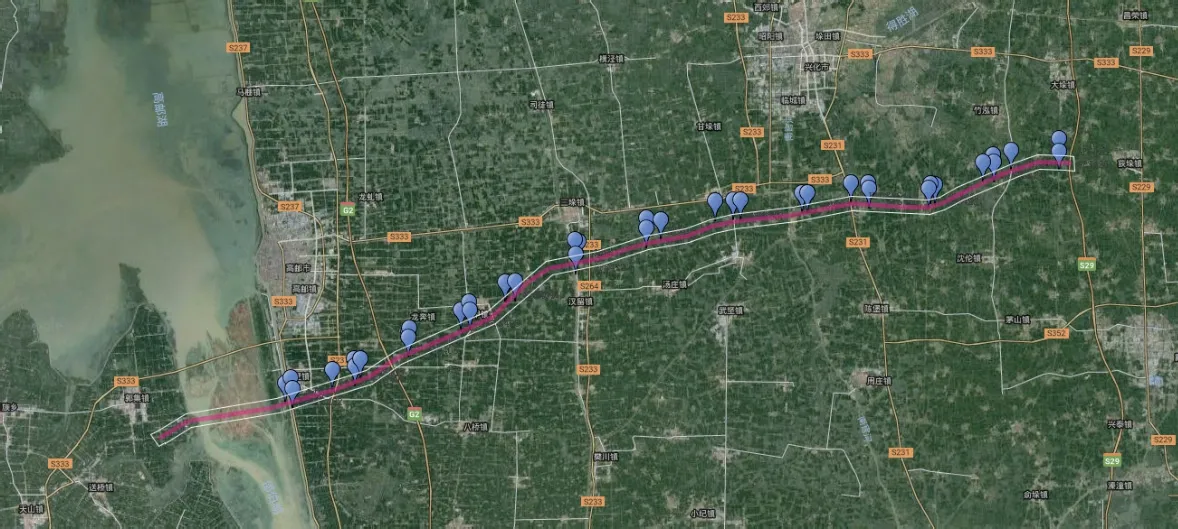
圖1 測區(qū)范圍
1.2 項目任務
項目任務包含四個部分:基站聯測、參考面測量;機載LiDAR 航空攝影;數據處理(點云數據處理以及1∶2000 比例尺DSM、DEM、DOM 制作);1∶2000 地形圖(DLG)制作。
2 項目實施的關鍵技術及設備
2.1 LiDAR 技術
機載激光雷達測量系統涵蓋很多現階段較為先進的技術,包括激光測距技術、GPS 技術及慣性導航(INS)技術等。將這一技術應用在公路勘測設計工程中,目的就是獲取高精度的數字表面模型,保證勘測效率和精度。
本項目中,激光雷達測量系統采用SkyEye 天眼激光科技有限公司的SE-J500C 系統(如圖2 所示),它集成了激光掃描儀、慣導系統及數碼相機,其中,數碼相機為Sony A7R;慣導系統型號為Applanix POS/AV 系列,采樣頻率100Hz;激光掃描儀的型號為RIEGL_VUX_1UAV,最大脈沖頻率550KHz,掃描角度330°,飛機采用北方天途航空技術發(fā)展有限公司的M6FC6 旋翼無人機(如圖3 所示)。
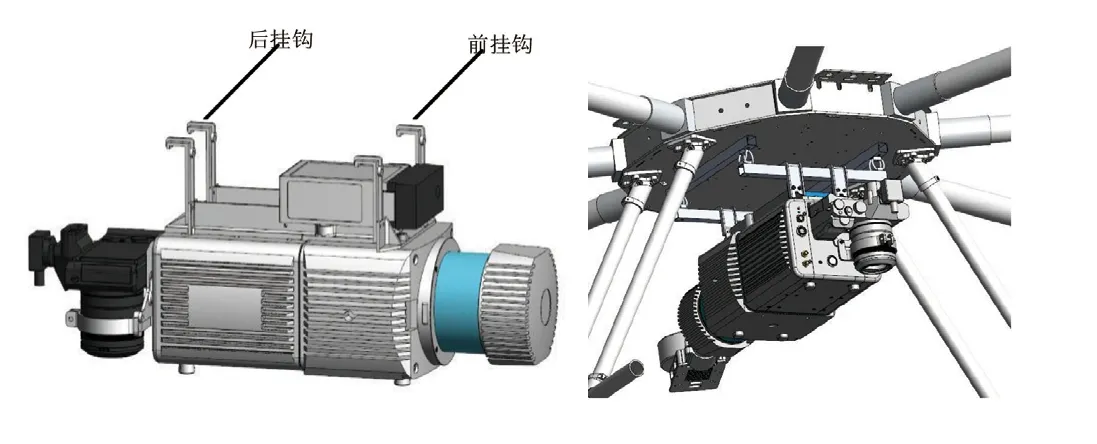
圖2 SE-J500C激光雷達航測系統

圖3 天途M6FC六旋翼無人機
2.2 LiDAR 航空攝影
航攝要嚴格按照要求執(zhí)行,如果出現絕對漏洞或其他嚴重缺陷需要補攝[2]。漏洞補攝時要結合以往的設計航跡開展工作。對于不影響內業(yè)加密選點和模型連接的漏洞,只需補攝漏洞即可,實際航線如圖4 所示。

圖4 實際航攝航線
2.3 激光點云分類
(1)利用TerraSolid 軟件濾波(分離地面點和非地面點):該軟件基于不規(guī)則三角網原理,通過設定參數閾值進行濾波。其主要的參數設置項為:Max building size、Terrian angle、Iteration angle 等,閾值大小取決于測區(qū)的地形以及植被的高低、密度等。 (2)將分離出來的非地面點進行細分:根據點的高度、分布的形狀、密度、坡度等特征,對非地面點云進行分類。對于形狀規(guī)則、空間特征明顯的地物(如建筑物、電力塔等),可通過參數設置,利用軟件自動提取。同時,采用人機交互方式輔助分類。也可利用基于反射強度、回波次數、地物形狀等的算法或算法組合,對點云數據進行自動分類。
2.4 精度要求
DOM 不能有任何噪聲、污點、劃痕等,點云數據密度應大于1 個點/平方米。數字地面模型精度要求是 :路線橫斷面數模提取精度應滿足平面精度≤10 cm,高程精度≤5 cm。被交道路采集精度要求是:被交道路需按要求提取道路兩側邊線、行車線等路線元素,提取精度應滿足平面精度≤5 cm,高程精度≤3 cm[3]。
3 數據處理以及成果制作分析
3.1 LiDAR 數據處理流程
應用輕型機載激光雷達航測系統,針對數據處理層面,要按照LiDAR 數據處理流程(如圖5 所示)進行。
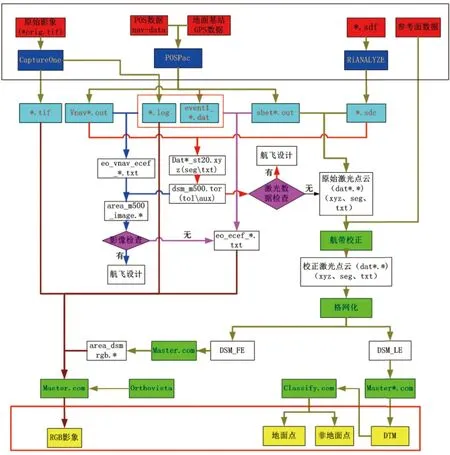
圖 5 LiDAR數據處理流程
(1)針對導航文件制作。依照實際情況對POS 姿態(tài)數據進行應用,同時聯合應用地面GPS 基站數據共同處理,以獲得相對精準的導航數據文件,提升測量效果和水平[4]。
(2)針對控制文件制作。在制作控制文件時,應嚴格檢查,明確是否存在漏飛現象。然后結合覆蓋數據,采用科學手段制作控制文件。
(3)針對三維激光點云坐標計算。科學處理原始激光數據,確保其可以成為原始的三維激光點云數據。然后結合數據所測得的平面和高程控制點,對二者進行校正,以精準計算出地表目標物的空間三維坐標。
3.2 DEM 制作
通常情況下,DEM 是用激光數據的末次回波生成的,制作流程為:(1)格網化。依照點云的坐標值,根據一定的點間隔,將經過校正的點云數據插入規(guī)則格網中。然后劃分點云數據,將其分成多個大小的圖幅[5]。(2)填補小縫隙。結合實際對經過格網化的點云數據進行填充處理,可以用周圍點的灰度值填充影像中的小縫隙、小黑洞,提高高程值,確保沒有任何黑洞現象。(3)生成浮雕影像。利用相應的技術手段,讓處理完成的數據生成浮雕影像,以便后續(xù)生成三維模型,直觀反映地表實際。(4)過濾。填充、去粗點工作結束后,還要進行過濾處理。過濾時,要先進行過濾參數試驗,只有選好過濾參數,才能過濾好,進而保證數據成果質量,減少手工工作量。過濾參數試驗結束后,將參數應用于所有過濾命令中。(5)手工編輯。過濾后影像上有很多黑洞,大多是過濾掉地物遺留下來的,一般應用程序無法將其過濾干凈,需要人工干預。(6)內插。要想徹底清除影像上的黑洞,應進行內插處理,利用黑洞周圍的高程點,將黑洞內插上,保證地面具有較強的平坦性。(7)裁剪重疊區(qū)。內插結束后,需要剪裁每幅影像邊緣的重疊部分,最終生成DEM 模型。
3.3 DOM 制作
首先,DOM 制作要進行正射影像校正,利用生成的DEM,合理地對外業(yè)采集的影像進行微分對糾正,以便在短時間內生成單幅正射影像。其次,要進行勻色。將獲取的影像導入Inpho 軟件,實現對正射影像的勻色處理,確保影像整體顏色協調、勻稱。再次,需要對編輯鑲嵌線進行合理制作。最后,進行影像分幅制作,最終生成正射影像DOM[6]。
4 結束語
在公路勘測設計中,利用輕型機載激光雷達航測技術,可以實現高自動化、高機動性勘測,且勘測效率高、成果生產周期較短,測繪成果精度較高。然而,該技術雖較為先進,但要想廣泛應用于公路勘測設計項目,還需出臺相應的技術規(guī)范和標準,強化應用研究。
猜你喜歡
中學生數理化·自主招生(2022年9期)2022-05-30 10:48:04
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子測試(2018年4期)2018-05-09 07:28:12
當代化工研究(2016年9期)2016-03-20 16:22:13
中國慣性技術學報(2015年1期)2015-12-19 13:12:17
計算機工程(2015年4期)2015-07-05 08:28:04
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
聯合國青年技術培訓(2014年7期)2014-04-12 00:00:00
中國質量與標準導報(2014年7期)2014-02-28 22:24:35