一種長(zhǎng)基線中野值點(diǎn)判定、剔除及修正方法
2020-03-23 09:26:10李釘云馮海泓
聲學(xué)技術(shù) 2020年1期
關(guān)鍵詞:卡爾曼濾波
李釘云,馮海泓
(1. 中國(guó)科學(xué)院聲學(xué)研究所東海研究站,上海201815;2. 中國(guó)科學(xué)院大學(xué),北京100049)
0 引 言
隨著海洋技術(shù)的日益發(fā)展,各種水下作業(yè)和科考設(shè)備得以廣泛使用,因此對(duì)水下聲學(xué)定位[1]的需求日益增加。其中,常用的水下聲學(xué)定位系統(tǒng)有長(zhǎng)基線(Long Base Line, LBL)[2-3]、短基線(Short Base Line, SBL)和超短基線(Ultra Short Base Line,USBL)定位系統(tǒng)。長(zhǎng)基線定位系統(tǒng)由于其定位精度高、覆蓋范圍廣等優(yōu)點(diǎn)被廣泛用于水下定位中。在使用長(zhǎng)基線定位系統(tǒng)定位的過程中,由于受到各種環(huán)境因素的影響,求解時(shí)不免出現(xiàn)一些偏差較大的點(diǎn),俗稱野值點(diǎn)[4]。野值點(diǎn)的出現(xiàn)不僅會(huì)降低定位精度,而且會(huì)使得目標(biāo)在該點(diǎn)的位置和速度等運(yùn)動(dòng)狀態(tài)信息無(wú)法被準(zhǔn)確獲取,因此需要對(duì)野值點(diǎn)進(jìn)行實(shí)時(shí)的判定、剔除和修正。常用的門限檢測(cè)方法[5]僅能對(duì)長(zhǎng)基線系統(tǒng)定位軌跡中的大部分野值點(diǎn)進(jìn)行剔除,而不能對(duì)其進(jìn)行修正。殘差檢測(cè)法可對(duì)野值點(diǎn)進(jìn)行剔除和修正,但是當(dāng)濾波模型與實(shí)際運(yùn)動(dòng)不匹配時(shí),效果較差。
為此,本文在殘差檢測(cè)法的基礎(chǔ)上提出了改進(jìn)殘差檢測(cè)法,以卡爾曼濾波的殘差絕對(duì)值作為野值點(diǎn)的判定標(biāo)準(zhǔn),對(duì)其進(jìn)行判定和剔除,以調(diào)整后的卡爾曼濾波估計(jì)作為野值點(diǎn)的修正值。針對(duì)濾波模型與實(shí)際運(yùn)動(dòng)不匹配時(shí),正常點(diǎn)濾波后偏離原始位置這一問題,選擇對(duì)正常點(diǎn)不做處理來(lái)減小后置處理引入的誤差。
1 門限檢測(cè)法
門限檢測(cè)法是長(zhǎng)基線系統(tǒng)定位中野值點(diǎn)判定和剔除的常用方法。設(shè)長(zhǎng)基線系統(tǒng)中待定位目標(biāo)運(yùn)動(dòng)的最大速度為vm,定位周期為T,則檢測(cè)的門限值H 為

設(shè)長(zhǎng)基線系統(tǒng)定位中的軌跡點(diǎn)坐標(biāo)為( xk, yk), k=1 ,2,3…,則初始點(diǎn)坐標(biāo)為( x1, y1),它到第k (k >1 )個(gè)點(diǎn)之間的距離Dk為

由運(yùn)動(dòng)的基本規(guī)律可知,目標(biāo)在一個(gè)周期內(nèi)的運(yùn)動(dòng)位移應(yīng)小于或者等于其最大速度與定位周期的乘積。根據(jù)以上規(guī)律,可得門限檢測(cè)法的基本步驟為:
(1) 選一個(gè)正常點(diǎn)作為初始點(diǎn)( x1, y1);
(2) 判斷前兩個(gè)點(diǎn)之間的距離D2,若是D2< H,則該點(diǎn)為正常點(diǎn),將其作為初始點(diǎn),回到步驟(1)。反之,該點(diǎn)為野值點(diǎn),并繼續(xù)判斷初始點(diǎn)和第k (k > 2)個(gè)點(diǎn)之間的距離,直至 Dk<kH,則當(dāng)前的點(diǎn)為正常點(diǎn),在此之前的k? 2個(gè)點(diǎn)均為野值點(diǎn),將該點(diǎn)作為初始點(diǎn),回到步驟(1),直到結(jié)束。
2 殘差檢測(cè)法
在長(zhǎng)基線定位系統(tǒng)的數(shù)據(jù)處理過程中,可以利用卡爾曼濾波[6]的殘差作為評(píng)判標(biāo)準(zhǔn),對(duì)野值點(diǎn)進(jìn)行判定和剔除,用卡爾曼濾波估計(jì)對(duì)野值點(diǎn)進(jìn)行修正,并對(duì)正常點(diǎn)進(jìn)行卡爾曼濾波。這樣的處理可以剔除和修正野值點(diǎn),使得定位軌跡更加平滑,本文將這樣的處理方法命名為殘差檢測(cè)法。
卡爾曼濾波是利用線性系統(tǒng)狀態(tài)方程,通過輸入和輸出的觀測(cè)數(shù)據(jù),對(duì)系統(tǒng)狀態(tài)進(jìn)行最優(yōu)估計(jì)的算法。離散卡爾曼濾波[7]通常由如下狀態(tài)方程和測(cè)量方程構(gòu)成:

卡爾曼濾波將預(yù)報(bào)估計(jì)的方差作為評(píng)定數(shù)據(jù)好壞的指標(biāo),并根據(jù)預(yù)報(bào)估計(jì)的方差來(lái)確定卡爾曼濾波增益,之后通過卡爾曼濾波增益將權(quán)值分配給理論計(jì)算值和實(shí)際測(cè)量值,從而得出最優(yōu)的估計(jì)。根據(jù)上述卡爾曼濾波的基本思想可得其基本濾波處理的步驟為
(1) 預(yù)報(bào)估計(jì)

(2) 預(yù)報(bào)誤差協(xié)方差矩陣

(3) 濾波最佳增益
總而言之,中華傳統(tǒng)文化博大而精深。我們可以通過種種方式,讓學(xué)生接觸更多豐富的傳統(tǒng)文化,反過來(lái)滋養(yǎng)自己的寫作內(nèi)涵,達(dá)到傳承中華傳統(tǒng)文化的效果。

(4) 濾波估計(jì)(狀態(tài)估計(jì))

(5) 濾波估計(jì)的均方誤差

使用卡爾曼濾波時(shí),首先需要對(duì)待濾波的數(shù)據(jù)進(jìn)行預(yù)報(bào)估計(jì),當(dāng)濾波模型與實(shí)際運(yùn)動(dòng)相匹配時(shí),預(yù)報(bào)估計(jì)值與實(shí)際測(cè)量值偏差較小。因此可以使用殘差的絕對(duì)值為參考,給出野值點(diǎn)的殘差閾值δ ,當(dāng)殘差絕對(duì)值大于閾值時(shí),判定該點(diǎn)為野值點(diǎn),并使用卡爾曼濾波的預(yù)報(bào)估計(jì)值Φk,k?1對(duì)野值點(diǎn)進(jìn)行修正[8-9];反之,該點(diǎn)為正常點(diǎn),可對(duì)其進(jìn)行卡爾曼濾波,即在濾波處理的過程中將式(8)改為

使用殘差檢測(cè)法時(shí),將卡爾曼濾波步驟中的式(8)改為式(10)即可。
3 改進(jìn)殘差檢測(cè)法
卡爾曼濾波要求濾波模型與實(shí)際運(yùn)動(dòng)相匹配時(shí),才會(huì)有較好的濾波效果;反之,不僅影響濾波效果,而且會(huì)使得濾波結(jié)果發(fā)散。長(zhǎng)基線系統(tǒng)定位中常用的卡爾曼濾波模型為勻加速直線運(yùn)動(dòng)模型,但是水下目標(biāo)不一定時(shí)刻在做勻加速直線運(yùn)動(dòng)。濾波模型與實(shí)際運(yùn)動(dòng)不匹配時(shí),卡爾曼濾波的殘差絕對(duì)值將會(huì)增大,此時(shí)應(yīng)該適當(dāng)調(diào)整殘差閾值δ 。此外,卡爾曼濾波的預(yù)報(bào)估計(jì)值Φk,k?1與實(shí)際值也會(huì)有一定偏差,因此將預(yù)報(bào)估計(jì)值調(diào)整為αΦk,k?1,使得調(diào)整后的預(yù)報(bào)估計(jì)值更加接近于野值點(diǎn)偏離前的真實(shí)位置,從而更準(zhǔn)確地對(duì)其進(jìn)行修正。由于濾波模型與實(shí)際運(yùn)動(dòng)不相匹配,部分正常點(diǎn)在進(jìn)行濾波后會(huì)與原始軌跡有偏離,此時(shí)對(duì)正常的點(diǎn)不做處理,保留其原始值,即將式(10)改為


由式(12)計(jì)算出殘差閾值δ 后,將式(10)改為式(11)后,再按照卡爾曼濾波的步驟進(jìn)行處理的方法即為改進(jìn)殘差檢測(cè)法。
4 實(shí)驗(yàn)結(jié)果分析
湖上實(shí)驗(yàn)中,使用長(zhǎng)基線系統(tǒng)對(duì)水下無(wú)人潛水器(Unmanned Underwater Vehicle, UUV)進(jìn)行定位,其中長(zhǎng)基線系統(tǒng)定位節(jié)點(diǎn)數(shù)量為3 個(gè),定位工作周期為10 s,定位坐標(biāo)系為東-北-天坐標(biāo)系,UUV 自身通過慣性導(dǎo)航技術(shù)進(jìn)行導(dǎo)航,其某一航次長(zhǎng)基線系統(tǒng)的定位軌跡及慣性導(dǎo)航軌跡如圖1 所示,局部軌跡如圖2 所示。
在短時(shí)間內(nèi)慣性導(dǎo)航系統(tǒng)的器件漂移誤差較小,所以認(rèn)為UUV 的慣性導(dǎo)航軌跡是準(zhǔn)確的,并將其作為長(zhǎng)基線系統(tǒng)定位軌跡中野值點(diǎn)判定的參考。從圖1 和圖2 中可以看出,長(zhǎng)基線系統(tǒng)定位軌跡中存在4 個(gè)野值點(diǎn)。對(duì)該軌跡分別使用門限檢測(cè)法、殘差檢測(cè)法和改進(jìn)殘差檢測(cè)法進(jìn)行處理,三種方法處理后的軌跡與UUV 的慣性導(dǎo)航軌跡對(duì)比圖如圖3、圖4 和圖5 所示。
對(duì)比圖2 和圖3 可以看出,使用門限檢測(cè)法處理后,長(zhǎng)基線系統(tǒng)定位軌跡中的4 個(gè)野值點(diǎn)被剔除了3 個(gè),剩余1 個(gè)未被剔除。門限檢測(cè)法對(duì)于野值點(diǎn)的剔除具有一定效果,但是該方法不能對(duì)剔除后的野值點(diǎn)進(jìn)行修正。如果需要對(duì)野值點(diǎn)進(jìn)行修正,則需對(duì)剔除野值點(diǎn)后的數(shù)據(jù)進(jìn)行插值操作。這樣不僅增加了處理步驟,也增加了處理時(shí)間,使得該方法的實(shí)時(shí)性較差。
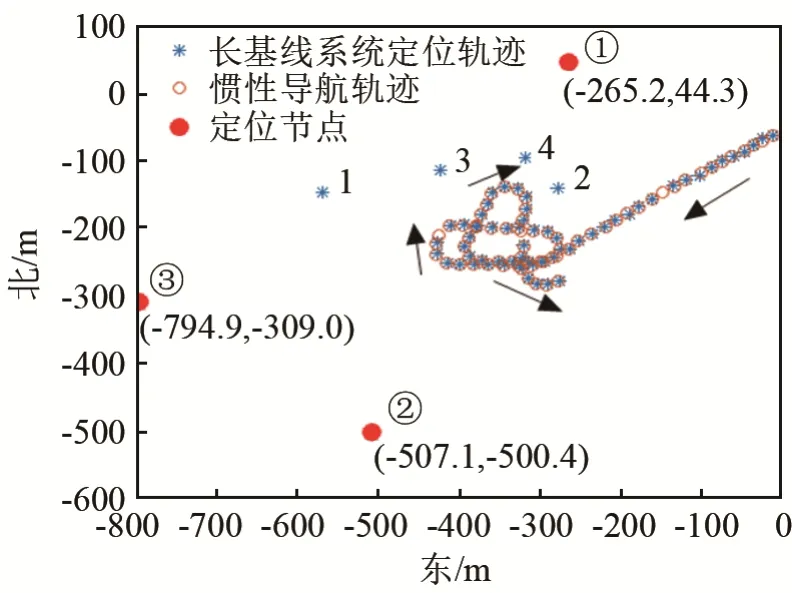
圖1 水下無(wú)人潛水器的運(yùn)動(dòng)軌跡Fig.1 The moving trajectory of UUV

圖2 局部的水下無(wú)人潛水器運(yùn)動(dòng)軌跡圖Fig.2 A part of UUV moving trajectory
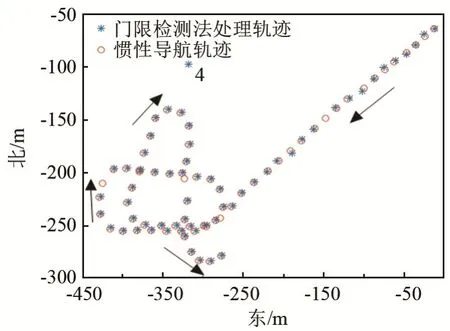
圖3 門限檢測(cè)法處理軌跡Fig.3 Trajectory processed by threshold detection method
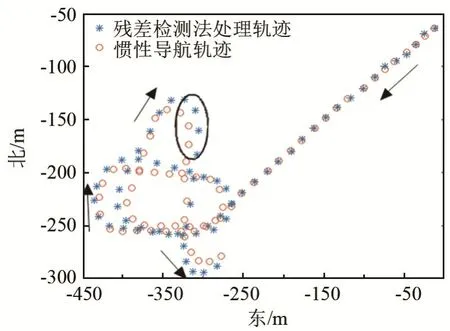
圖4 殘差檢測(cè)法處理軌跡Fig.4 Trajectory processed by residual error detection method

圖5 改進(jìn)殘差檢測(cè)法處理軌跡Fig.5 Trajectory processed by the improved residual error detection method
對(duì)比圖2 和圖4 可以看出,使用殘差檢測(cè)法處理后,長(zhǎng)基線系統(tǒng)定位軌跡中的野值點(diǎn)已被剔除和修正,但是局部區(qū)域在處理后引入了偏差。原因在于濾波模型與該處運(yùn)動(dòng)不匹配,雖然濾波處理后的幾何形狀是相似的,但是局部區(qū)域卻出現(xiàn)了偏差。殘差檢測(cè)法可以對(duì)野值點(diǎn)進(jìn)行剔除和修正,但是當(dāng)濾波模型與實(shí)際運(yùn)動(dòng)不匹配時(shí),其效果較差。
對(duì)比圖2 和圖5 可以看出,改進(jìn)殘差檢測(cè)法可以對(duì)野值點(diǎn)進(jìn)行剔除和修正,且處理后的軌跡更加符合UUV 的實(shí)際運(yùn)動(dòng)軌跡,具有較好的效果。
以UUV 的慣性導(dǎo)航軌跡為參考,計(jì)算長(zhǎng)基線系統(tǒng)定位軌跡的誤差均方根值,剔除野值點(diǎn)前為55.68 m,使用殘差檢測(cè)法處理后為8.11 m,使用改進(jìn)殘差檢測(cè)法處理后為2.04 m。由于門限檢測(cè)法效果較差,因此不對(duì)其做進(jìn)一步的誤差分析。顯然,改進(jìn)殘差檢測(cè)法對(duì)長(zhǎng)基線系統(tǒng)定位軌跡中的野值點(diǎn)具有較好的剔除和修正效果,且減小了長(zhǎng)基線系統(tǒng)的定位誤差。
5 結(jié) 論
本文介紹了長(zhǎng)基線系統(tǒng)定位軌跡中野值點(diǎn)處理的門限檢測(cè)法和殘差檢測(cè)法,提出了改進(jìn)殘差檢測(cè)法用于對(duì)野值點(diǎn)的判定、剔除和修正,并給出了殘差閾值的計(jì)算公式。通過實(shí)驗(yàn)數(shù)據(jù)表明,門限檢測(cè)法僅能對(duì)大部分野值點(diǎn)進(jìn)行剔除,殘差檢測(cè)法在對(duì)野值點(diǎn)進(jìn)行剔除和修正的同時(shí)會(huì)使得某些正常點(diǎn)與原始位置偏離,而改進(jìn)殘差檢測(cè)法可以在對(duì)野值點(diǎn)進(jìn)行剔除和修正的同時(shí)更好地貼合原始軌跡,未剔除野值點(diǎn)時(shí)的定位誤差為55.68 m,使用改進(jìn)殘差檢測(cè)法處理后的定位誤差下降到了2.04 m,明顯地減小了定位誤差,具有較好的性能。因此,可將改進(jìn)殘差檢測(cè)法用于工程實(shí)踐中,提升長(zhǎng)基線系統(tǒng)的定位精度。
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36
