慣導平臺式重力測量技術實現及應用
2020-03-19 04:20:12趙小明張子山
導航定位與授時 2020年2期
關鍵詞:測量
趙小明,高 巍,李 達,張子山
(天津航海儀器研究所,天津 300131)
0 引言
重力異常是地球物理場信息的重要組成部分,是海洋重力場環境信息的核心要素,在海洋資源開發、地球物理科學研究,尤其海戰場環境建設、水下自主導航、武器精密打擊等領域具有非常重要的應用價值[1-3]。海洋重力場測量的手段多樣,但相比之下,獲得高精度、高空間分辨率、大范圍海洋重力場信息的主要方式依然是船載重力測量[4-5]。
多年以來,國內軍地涉海單位用于重力測量的設備多為引進的國外商業產品,主流包括:美國L&R系列雙軸阻尼陀螺穩定平臺式重力儀、基于外部羅經方位輔助的德國KSS31-M雙軸平臺式重力儀以及俄羅斯GT-M系列三軸慣導平臺式海洋重力儀,在一段時期內推動了行業的快速發展。但隨著重力場數據在軍事和經濟領域戰略地位的不斷提高,完全依靠進口設備完成調查任務,對于重力信息的安全性和可靠性存在較大威脅,也不利于國內技術的進步。面對當下復雜的國際形勢,迫切需要加快推進重力儀的國產化,提升關鍵環節的自主可控能力。
通過對國外各型重力儀技術方案的分析比較發現,動態重力測量的理論和技術思路與慣性導航一脈相承,本質上是通過陀螺和加速度計(重力敏感器可視為一種特殊的加速度測量元件)建立物理或數學上的水平姿態基準,以直接或間接的方式獲得垂向重力信息。至此,2000年以后國內從事慣性導航技術研究和裝備生產的高校、科研院所相繼開展了基于慣導技術的重力測量技術研究和儀器研制,包括三軸慣導平臺式重力儀、解析方位雙軸平臺式重力儀以及全捷聯式重力儀,均采用了慣性導航系統的機械編排,在GNSS信息輔助下具備更好的動態地理坐標系跟蹤能力。其中,三軸慣導平臺式重力儀與解析方位雙軸平臺式重力儀能夠從物理上隔離載體高頻運動加速度影響,全捷聯式重力儀具備更小的體積,降低了結構復雜度。
目前,國內重力儀研制進入實用化階段,部分產品已投入正規的重力測量作業。平臺式重力儀在沿襲國外成熟方案的基礎上獲得了良好的實測性能,捷聯式重力儀先于國外投入應用。本文重點介紹了基于解析方位雙軸平臺式重力測量技術和高動態下重力測量數據處理方法,以此為基礎研制了ZL11-1A型重力儀產品,通過與進口重力儀產品同船作業比對驗證了上述技術的有效性。
1 工作原理
1.1 重力測量原理
平臺式重力儀利用慣性穩定平臺提供當地地理水平,使安裝其上的重力敏感器僅敏感當地垂線方向的加速度信息,經過對重力原始數據的后處理得到自由空間重力異常信息。
針對平臺式重力儀,自由空間重力異常δg可通過對慣導比力方程變形得到
(1)

出航前,需將已知點的重力值Ab聯測到重力儀所處位置上,將動態測量過程中的重力觀測值與碼頭基準值關聯。
由此,計算重力異常δg的工程化測量公式為
(2)

無論載體姿態如何變化,平臺式重力儀都能夠通過物理調平使垂向加速度測量誤差僅與重力敏感器的物理特性相關,水平加速度計元件誤差的耦合作用可忽略,相應的元件可選擇導航級,且無需頻繁標定。
1.2 平臺工作原理
基于解析方位的雙軸慣導平臺是慣導平臺的一種,它建立了一種滿足重力測量需求的方位地平姿態基準oxpypzp,與地理坐標系oxnynzn處于同一水平面,相對地理北向沿右手存在方位角K,位置關系如圖1所示。

圖1 方位地平坐標系與地理系的關系Fig.1 Relation between azimuthal horizon coordinate system and geographical system
該平臺在結構上使方位與臺體保持固聯,重力敏感器及其他慣性元件以組件形式置于內外2個水平框架中,結構形式如圖2所示。
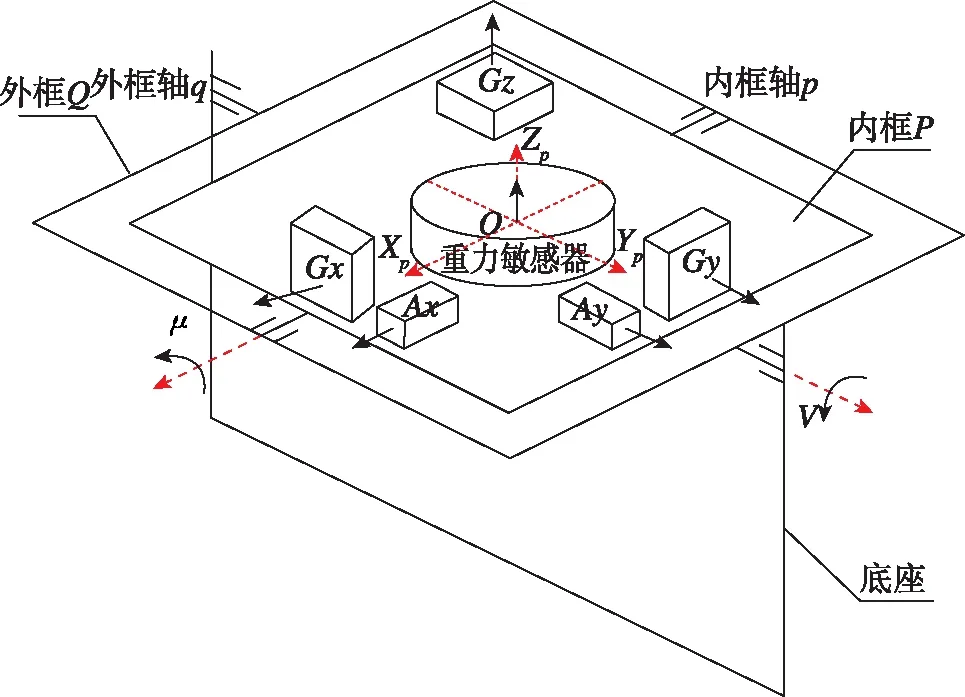
圖2 結構形式圖Fig.2 Structural form diagram
直接利用陀螺高頻和高分辨率角運動采樣,控制平臺使其在慣性系下不發生轉動,實現載體角運動隔離。在此基礎上,通過慣導力學方程數學計算平臺方位和水平施矩指令,經坐標分解驅動電機完成框架機械調平,重力敏感器沿地垂方向直接測量垂向加速度,外部導航信息輔助完成各項改正,最終獲得重力異常,其工作原理如圖3所示。
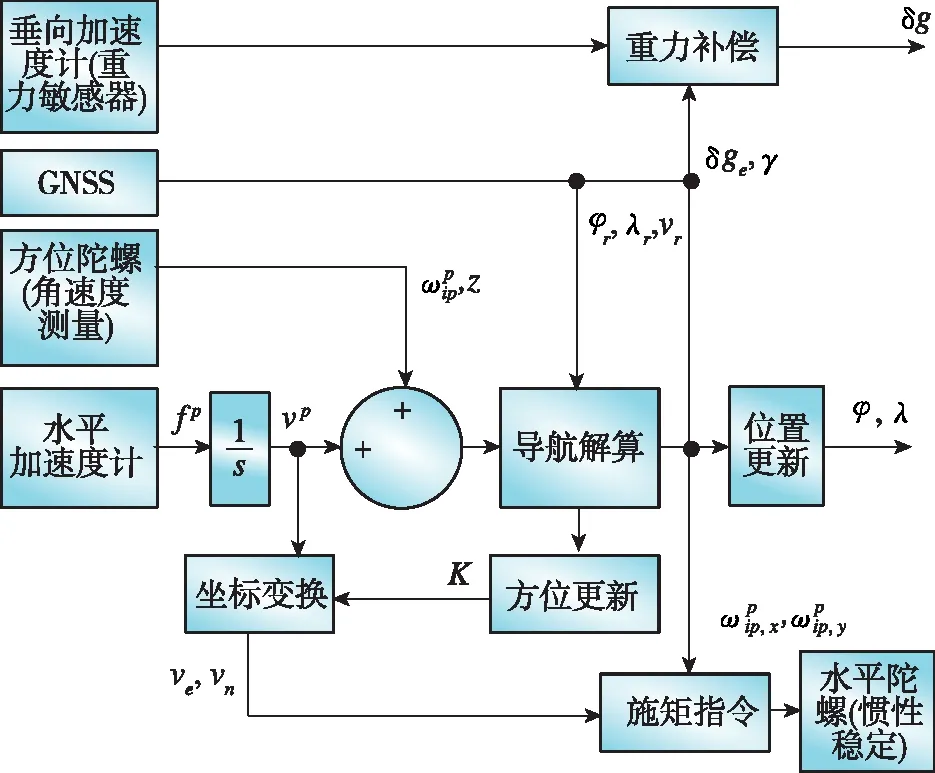
圖3 解析方位雙軸慣導平臺式重力儀工作原理Fig.3 Principle of analytical azimuth dual-axis inertial navigation platform gravimeter
解析方位雙軸慣導平臺具備與自由方位慣導系統相似的技術優勢,垂向陀螺僅完成載體方位角速度測量,數學計算方位角,在高緯度地區避免了施矩過大和方位穩定回路設計的困難。同時,采用方向余弦積分法降低了方位角解算誤差,提高了高緯度地區平臺控制精度,使設備在穿越極點時仍能夠正常工作。

(3)

(4)

(5)

(6)
(7)
式中,K為臺體方位角,單位rad。
(8)
(9)

在此基礎上,速度的更新方程可表示為
(10)
(11)
對式(11)展開得到東、北向速度為
(12)
最后,對式(8)重新整理可得平臺水平施矩量為
(13)
式中,εx和εy為水平陀螺漂移,單位rad/s。

由解算和控制過程可知,解析方位雙軸慣導平臺依然采用了慣性導航的機械編排,具有Schuler調諧周期,平臺不受載體水平運動影響。在外部導航信息輔助下,可降低慣性元件誤差引起的平臺傾斜振蕩,長期工作姿態水平精度高,載體機動適應性強。
2 數據處理
數據處理是重力測量的另一項關鍵技術,常規的海洋重力數據處理僅涉及重力零點漂移的閉合校正、厄特弗斯改正和正常場改正,相應的計算方法討論較多,這里不再贅述。但隨著動態條件逐漸惡劣,載體運動擾動加大,通過垂向重力敏感器標度誤差、非線性誤差和平臺傾斜耦合水平加速度,將綜合引起重力異常測量精度降低。此時,對式(1)進一步考慮有
(14)
式中,δK為垂向加速度測量誤差,單位10-6;τ為傾斜誤差,單位rad;Ax和Ay為載體水平加速度,單位m/s2;Ge和Gn為厄特弗斯改正和正常場改正,單位m/s2。
在高海況下,上述影響往往難以通過簡單的低通濾波有效消除。因此,為進一步提高測量精度,在對原始重力數據進行處理中引入Kalman濾波方法,在進行垂向運動加速度改正的同時,實現對垂向加速度誤差和重力敏感器標度、傾斜誤差的估計,通過狀態變量修正獲得對δg更精確的估計。

(15)
同時,高度與垂向速度的關系為
(16)
考慮重力敏感器標度誤差與安裝誤差為常值,有
(17)
另外,重力異常以隨機統計模型進行描述,其二階導數可近似為
(18)
式中,q為白噪聲;σ為噪聲強度。
(19)

(20)
采用GNSS高度信息建立觀測方程,即
h-h0=HX+v
(21)

對應的數據處理流程如圖4所示。
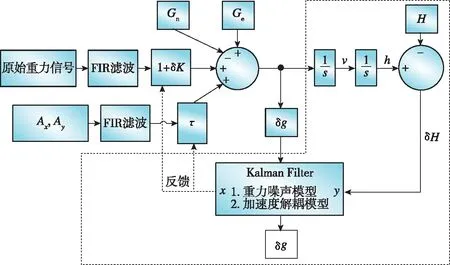
圖4 重力數據處理流程Fig.4 Gravity data processing flow
3 系統組成
ZL11-1A型重力儀是應用上述技術方案,針對水面船載重力測量作業要求推出的成熟產品。采用0.01(°)/h精度的光纖陀螺和1×10-5g精度的石英撓性加速度計實現穩定平臺控制,慣導力學編排適應高緯度測量,GNSS導航信息輔助實現高精度平臺控制和重力數據處理。設計了專用的阻尼減震裝置抑制升沉加速度干擾,滿足船舶的振動環境和作業海況需求。包括主體儀器、阻尼減震裝置和電源顯控等各部件采用一體化集成方式,整體外觀如圖5所示。

圖5 ZL11-1A型重力儀外觀Fig.5 Appearance of ZL11-1A gravimeter
4 應用效果
ZL11-1A型重力儀承擔軍民領域重力測量作業任務,參與全球基準建設、海上絲綢之路等重大工程,分別與美國L&R系列重力儀、德國KSS31重力儀和俄羅斯GT-2M重力儀進行了同船比對,經歷了各類海上作業工況,全面檢驗了設備的性能。
尤其在500t以下的小型測量船上開展近岸重力測量作業中,載體水平搖擺幅度超過20°,航向變化超過3(°)/s,如圖6所示。此時,測線交叉點內符合精度達到系統差0.16mGal、平均誤差0.36mGal、中誤差0.49mGal,物理平臺配合慣導力學控制有效隔離載體運動擾動,動態適應性良好。測線交叉點重力測量不符值如圖7所示。
針對接近6級海況下載體運動加速度擾動顯著劇烈的情況,在常規數據改正、濾波后重力異常值依然存在明顯的局部波動性誤差。此時,采用基于衛星高度信息組合下的Kalman濾波方法,可有效降低測量中誤差0.36mGal,效果對比如圖8所示。
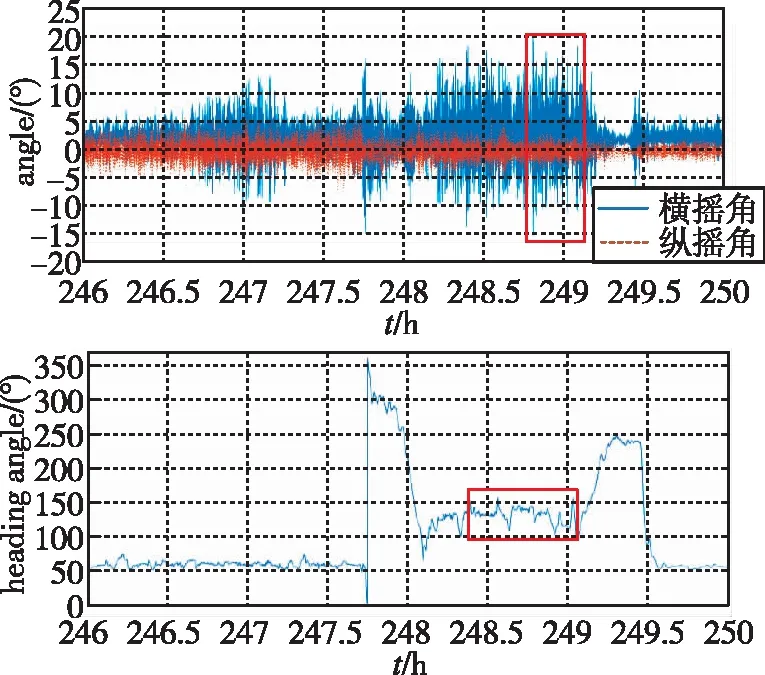
圖6 測線上載體姿態變化情況Fig.6 Vehicle attitude change on survey line
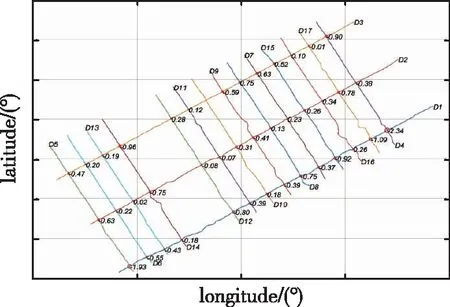
圖7基于小型測量船測線交叉點內符合情況Fig.7 Internal coincidence at intersection point of surveying line based on small surveying vessel
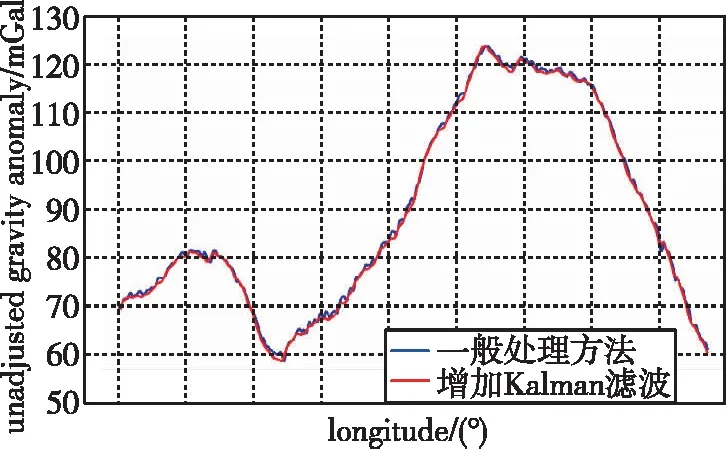
圖8 采用Kalman濾波方法抑制運動擾動噪聲效果Fig.8 Effect of suppressing motion disturbance noise by Kalman filtering method
另外,與業內公認動態適應能力最強、精度最高的GT-2M型重力儀進行了外符合比對。結果顯示,ZL11-1A型重力儀與GT-2M型重力儀重力測量不符值系統差0.30mGal、平均誤差0.31mGal、中誤差0.33mGal,接近國外高端設備性能水平。重力異常曲線對比如圖9所示。
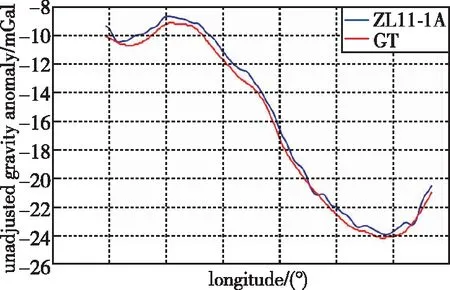
圖9 與GT-2M外符合比對情況Fig.9 External coincidence with GT-2M
5 結論
本文詳細闡述了解析方位雙軸慣導平臺式重力測量的工作原理,并通過基于方位余弦積的慣導力學編排解決了極區工作問題,實現了高緯度重力測量。在常規平臺式重力測量數據處理方法的基礎上,針對高動態環境提出了基于Kalman濾波的運動擾動修正方法,通過實測數據驗證了方法的有效性。應用上述技術方案研制了ZL11-1A型海洋重力儀,達到國際先進水平,具備替代進口的能力。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
