液驅(qū)多維力加載系統(tǒng)的CMAC-PID復(fù)合控制
2020-03-13 03:04:24趙勁松王春發(fā)徐嘉祥馬志雷趙子寧
液壓與氣動(dòng) 2020年3期
關(guān)鍵詞:系統(tǒng)
趙勁松 王春發(fā) 楊 濤 徐嘉祥 馬志雷 趙子寧
(1.燕山大學(xué)河北省重型機(jī)械流體動(dòng)力傳輸與控制實(shí)驗(yàn)室, 河北秦皇島 066004;2.浙江大學(xué)流體動(dòng)力與機(jī)電系統(tǒng)國(guó)家重點(diǎn)實(shí)驗(yàn)室, 浙江杭州 310027;3.燕山大學(xué)機(jī)械工程系, 河北秦皇島 066004)
引言
目前在工程中對(duì)某構(gòu)件進(jìn)行力學(xué)性能檢測(cè)時(shí),主要采用單軸拉壓力檢測(cè),然而復(fù)雜的構(gòu)件在實(shí)際工程中需要承受復(fù)雜應(yīng)力環(huán)境,采用傳統(tǒng)單軸拉壓力檢測(cè)容易使構(gòu)件檢測(cè)數(shù)據(jù)不充分[1]。以并聯(lián)機(jī)構(gòu)為主體的多維力加載系統(tǒng)可以有效復(fù)現(xiàn)構(gòu)件所處的復(fù)雜應(yīng)力環(huán)境,相比于串聯(lián)機(jī)構(gòu)具有承載能力強(qiáng)、無(wú)累計(jì)誤差等優(yōu)點(diǎn)[2]。與此同時(shí),多維力加載系統(tǒng)也存在一些不足,如各通道輸出力存在交聯(lián)耦合力,控制精度有待提高等問(wèn)題[3-5]。
PID控制器是工業(yè)控制中使用最普遍的控制器,具有原理簡(jiǎn)單、使用方便和魯棒性較好等特點(diǎn),然而PID控制器在機(jī)理復(fù)雜、時(shí)變和強(qiáng)非線性的控制系統(tǒng)中隨動(dòng)性較差[6-7]。為彌補(bǔ)PID控制器的不足,引入小腦模型神經(jīng)網(wǎng)絡(luò)控制器(Cerebellar Model Articulation Controll,CMAC),CMAC早期主要應(yīng)用在機(jī)器人控制中,如機(jī)器人行走、視覺(jué)跟蹤、機(jī)器人運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)控制等領(lǐng)域。HU等[8]把CMAC引入到機(jī)器人行走的控制中,用以提高機(jī)器人行走的抗干擾性。郭紅梅等[9]采用CMAC與PID并行控制的方法,解決四旋翼無(wú)人機(jī)強(qiáng)耦合問(wèn)題,提高四旋翼無(wú)人機(jī)姿態(tài)跟蹤效果。岳學(xué)磊等[10]將CMAC與PID控制器結(jié)合構(gòu)成CMAC-PID復(fù)合控制器,用以提高無(wú)刷直流電機(jī)控制精度,減小超調(diào)量。因而分析CMAC與PID控制器結(jié)合所構(gòu)成的復(fù)合控制策略,對(duì)多維力加載系統(tǒng)控制特性的影響意義重大。
本研究在多維力加載系統(tǒng)三自由度力控工況下,對(duì)比CMAC-PID復(fù)合控制器與PID控制器的控制性能。通過(guò)仿真、實(shí)驗(yàn),驗(yàn)證了CMAC-PID復(fù)合控制器在降低通道間耦合力,提高多維力加載系統(tǒng)力控精度的有效性。
1 多維力加載系統(tǒng)建模
1.1 機(jī)構(gòu)動(dòng)力學(xué)建模
本研究以Stewart平臺(tái)為多維力加載系統(tǒng)的主體結(jié)構(gòu),由上平臺(tái)、下平臺(tái)、伺服作動(dòng)器以及胡克鉸組成,作動(dòng)器通過(guò)胡克鉸與上、下平臺(tái)連接,如圖1所示。多維力加載系統(tǒng)輸出的廣義空間作用力,可分解為沿x,y,z軸的力Fx,Fy,Fz和繞x,y,z軸的力矩Mx,My,Mz。
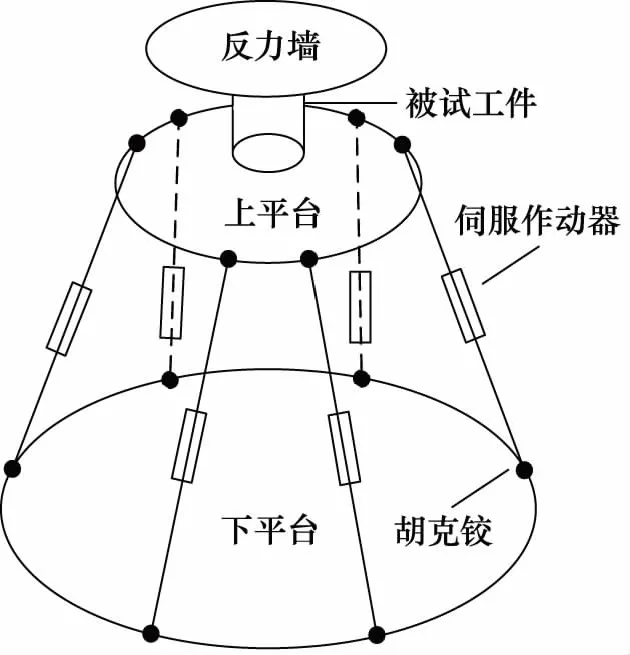
圖1 多維力加載系統(tǒng)示意圖
多維力加載系統(tǒng)進(jìn)行周期力加載試驗(yàn)時(shí),由于上平臺(tái)位姿呈周期性變化,系統(tǒng)的慣性力不可忽略。因此,該多維力加載系統(tǒng)平移方向力平衡方程可簡(jiǎn)化為:
(1)
式中,F′ —— 多維力加載系統(tǒng)和被試工件相互作用力
Ln—— 單位向量矩陣
mB—— 上平臺(tái)質(zhì)量
g—— 重力加速度向量
多維力加載系統(tǒng)轉(zhuǎn)動(dòng)方向的力矩平衡方程為:
(2)
式中,M′ —— 多維力加載系統(tǒng)與被試工件間相互作用力矩
IB—— 上平臺(tái)坐標(biāo)系下系統(tǒng)轉(zhuǎn)動(dòng)慣量矩陣
ω—— 世界坐標(biāo)系下動(dòng)坐標(biāo)系角速度
T—— 上平臺(tái)坐標(biāo)系與世界坐標(biāo)系之間旋轉(zhuǎn)變換矩陣
B—— 上平臺(tái)鉸點(diǎn)動(dòng)坐標(biāo)矩陣
考慮到伺服作動(dòng)器活塞桿慣性力,活塞桿與液壓缸轉(zhuǎn)動(dòng)慣量,活塞桿重力,液壓缸重力,整個(gè)并聯(lián)機(jī)構(gòu)的動(dòng)力學(xué)方程為:
(3)
式中,Jf,F—— 并聯(lián)機(jī)構(gòu)力雅可比矩陣
Ms—— 廣義質(zhì)量矩陣
Cs—— 科式向心項(xiàng)矩陣
Gs—— 重力項(xiàng)矩陣
Fo—— 多維力加載系統(tǒng)廣義輸出力矩陣
由于Ms為非對(duì)角陣,各通道輸出力存在耦合現(xiàn)象。
1.2 液壓動(dòng)力元件建模
受安裝空間限制,多維力加載系統(tǒng)中采用伺服閥控非對(duì)稱缸的單通道力控系統(tǒng)。與伺服閥控對(duì)稱缸相比,伺服閥控非對(duì)稱缸具有系統(tǒng)固有頻率不同,正反向運(yùn)動(dòng)的開環(huán)增益不同等特點(diǎn)[11],在對(duì)控制系統(tǒng)進(jìn)行建模時(shí)需要綜合考慮此類因素。其物理模型主要由伺服閥、伺服放大器、非對(duì)稱液壓缸、拉壓力力傳感器、位移傳感器、等效負(fù)載、控制器等環(huán)節(jié)組成。
通過(guò)構(gòu)建伺服閥控非對(duì)稱缸單通道力控系統(tǒng)模型,對(duì)系統(tǒng)進(jìn)行時(shí)域特性分析,用以判斷多維力加載系統(tǒng)系統(tǒng)的穩(wěn)定性及動(dòng)態(tài)響應(yīng)性能。單通道力控系統(tǒng)原理圖如圖2所示。

圖2 單通道力控系統(tǒng)原理圖
定義非對(duì)稱缸活塞兩端受力面積比為:
(4)
式中,A1,A2分別為無(wú)桿腔、有桿腔活塞桿面積。
定義負(fù)載壓力為:
(5)
式中,p1,p2分別為非對(duì)稱缸無(wú)桿腔、有桿腔油液壓力;FL為上平臺(tái)負(fù)載等效在各通道外負(fù)載力。
定義負(fù)載流量為:
(6)
式中,Q1,Q2分別為非對(duì)稱缸無(wú)桿腔、有桿腔流量。
當(dāng)系統(tǒng)液壓固有頻率取最小值時(shí),活塞桿處于:
(7)
式中,L,L1分別為活塞桿總長(zhǎng)度、無(wú)桿腔長(zhǎng)度。若在這一點(diǎn)能夠滿足系統(tǒng)工作需要,使系統(tǒng)達(dá)到穩(wěn)定狀態(tài),則系統(tǒng)在其他工作點(diǎn)也能穩(wěn)定工作,因此選取此點(diǎn)進(jìn)行建模。
考慮非對(duì)稱缸正反向運(yùn)動(dòng)時(shí)開環(huán)增益不同,分別列寫伺服閥流量方程、液壓缸流量連續(xù)方程、液壓缸力平衡方程,其拉式變換為:
(8)
(9)
式中,Xv—— 伺服閥閥芯位移
Kq1,Kq2—— 分別為活塞桿正向移動(dòng)、反向移動(dòng)時(shí)的流量增益系數(shù)
Kc1,Kc2—— 分別為活塞桿正向移動(dòng)、反向移動(dòng)時(shí)的流量壓力系數(shù)
Cop1,Cop2—— 分別為活塞桿正向移動(dòng)、反向移動(dòng)時(shí)的等效泄漏系數(shù)
Ctp—— 活塞桿正、反向移動(dòng)時(shí)的綜合泄漏系數(shù)
Bp—— 非對(duì)稱缸黏性阻尼系數(shù)
m—— 活塞桿等效質(zhì)量
k—— 力傳感器剛度
X—— 非對(duì)稱缸活塞桿位移
βe—— 非對(duì)稱缸體積彈性模量

(10)

(11)
(12)

(13)
(14)
(15)
(16)
式中,Cd—— 流量系數(shù)
w—— 伺服閥節(jié)流口的面積梯度
ρ—— 油液密度
ps—— 供油壓力
Cep—— 液壓缸外泄系數(shù)
Cip—— 液壓缸內(nèi)泄系數(shù)
忽略Cop1與Cop2,則閥控非對(duì)稱缸系統(tǒng)基本方程可為:
(17)
Fl=kX
(18)
此時(shí)閥控非對(duì)稱缸動(dòng)力機(jī)構(gòu)及負(fù)載的控制方框圖如圖3所示。
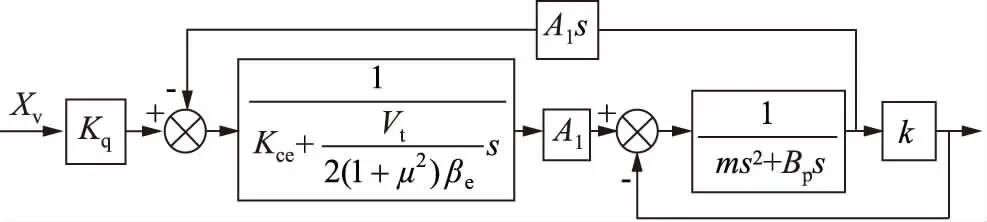
圖3 閥控非對(duì)稱缸動(dòng)力機(jī)構(gòu)及負(fù)載的控制方框圖
由圖3可以得出,伺服閥閥芯位移與活塞桿輸出力之間傳遞函數(shù)為:
(19)
電液伺服閥在建模時(shí)可設(shè)為二階振蕩環(huán)節(jié):
(20)
式中,Kxv—— 伺服閥增益系數(shù)
ωsv—— 伺服閥固有頻率
ξsv—— 伺服閥阻尼比
由于伺服放大器的頻寬,遠(yuǎn)高于系統(tǒng)液壓固有頻率,所以可以將伺服放大器等效成為比例環(huán)節(jié)建模,可表示為:
(21)
式中,Ka為伺服放大器增益系數(shù)。綜合考慮其他環(huán)節(jié)建模可得,單通道力控系統(tǒng)傳遞函數(shù)框圖如圖4所示。
2 CMAC-PID復(fù)合控制器設(shè)計(jì)
2.1 CMAC網(wǎng)絡(luò)結(jié)構(gòu)
CMAC是J.S.Albus[12]在1975年根據(jù)小腦皮層工作特點(diǎn)提出的一種表格查詢自適應(yīng)控制器,這種控制器能夠很好的處理不確定性與非線性問(wèn)題。與其他神經(jīng)網(wǎng)絡(luò)算法相比,CMAC響應(yīng)速度快、結(jié)構(gòu)簡(jiǎn)單且占用內(nèi)存小。CMAC網(wǎng)格結(jié)構(gòu)由輸入空間、存儲(chǔ)空間和輸出空間組成,儲(chǔ)存空間可分為實(shí)際儲(chǔ)存空間和虛擬儲(chǔ)存空間,可以實(shí)現(xiàn)由輸入空間到輸出空間的映射。CMAC網(wǎng)絡(luò)結(jié)構(gòu)圖如圖5所示。
在輸入向量量化過(guò)程中,輸入值根據(jù)量化級(jí)數(shù)激活輸入空間的量化子空間,如輸入si∈[a,b],可得輸入向量量化值為:

圖4 單通道力控系統(tǒng)傳遞函數(shù)框圖

圖5 CMAC網(wǎng)絡(luò)結(jié)構(gòu)圖
(22)
式中,smin,smax—— 輸入的最小,最大值
M—— 量化級(jí)數(shù)
在輸入空間的輸入向量向虛擬存儲(chǔ)空間進(jìn)行映射時(shí),由輸入空間的量化子空間激活虛擬存儲(chǔ)空間對(duì)應(yīng)儲(chǔ)存單元,重疊的虛擬存儲(chǔ)空間被激勵(lì),映射到虛擬存儲(chǔ)空間的輸入向量為:
RP=S(uP)=[s1(up),s2(up),…,sc(up)]T
(23)
sj(up)=1,j=1,2,…,c
(24)
式中,c為泛化參數(shù)。
由虛擬儲(chǔ)存空間向?qū)嶋H儲(chǔ)存空間進(jìn)行映射時(shí),大多采用雜散編碼形式,易使多個(gè)地址相互重疊。在輸入為一維空間的前提下,采用一對(duì)一映射方式可以有效提高映射精度。
輸出空間輸出值為實(shí)際儲(chǔ)存空間存儲(chǔ)單元權(quán)值w的加和,輸出值為:
(25)
在算法學(xué)習(xí)過(guò)程中,CMAC網(wǎng)絡(luò)通過(guò)最小均方規(guī)則對(duì)所得權(quán)值進(jìn)行修正,權(quán)值調(diào)整公式為:
(26)
e(t)=r(t)-y(t)
(27)
式中,r(t) —— 給定信號(hào)
y(t) —— 反饋信號(hào)
由梯度下降法知,網(wǎng)絡(luò)權(quán)值調(diào)整公式為:
(28)
wj(t)=wj(t-1)+Δwj(t)+
α×(wj(t-1)-wj(t-2))
(29)
wj=[w1w2…wc]
(30)
式中,η—— 學(xué)習(xí)效率
α—— 動(dòng)量因子
CMAC網(wǎng)格精度與學(xué)習(xí)效率、動(dòng)量因子兩參數(shù)的選擇有關(guān),同時(shí)隨量化級(jí)數(shù)的增加而提高,量化級(jí)數(shù)越高所需內(nèi)存就越大,一般取量化級(jí)數(shù)M為泛化參數(shù)c的10倍及以上,這樣才能取得較好的逼近非線性函數(shù)的效果。
2.2 CMAC-PID控制器結(jié)構(gòu)設(shè)計(jì)
CMAC-PID復(fù)合控制器采用CMAC做前饋控制[13],可以提高系統(tǒng)的響應(yīng)速度和控制精度[14-15],用PID控制器保障系統(tǒng)的穩(wěn)定性,兩種控制器結(jié)合構(gòu)成復(fù)合控制。其復(fù)合控制結(jié)構(gòu)如圖6所示。

圖6 CMAC-PID復(fù)合控制器結(jié)構(gòu)圖
3 仿真分析
3.1 仿真參數(shù)設(shè)定
根據(jù)多維力系統(tǒng)機(jī)構(gòu)動(dòng)力學(xué)模型、液壓動(dòng)力元件模型及其他環(huán)節(jié)模型,利用MATLAB/Simulink軟件,進(jìn)行多維力加載系統(tǒng)系統(tǒng)建模,各環(huán)節(jié)仿真參數(shù)見(jiàn)表1。
3.2 靜態(tài)加載仿真對(duì)比分析
對(duì)不同控制器作用下多維力加載系統(tǒng)進(jìn)行靜態(tài)力、動(dòng)態(tài)力仿真時(shí),首先調(diào)節(jié)多維力加載系統(tǒng)單通道PID參數(shù),將單通道靜態(tài)力、動(dòng)態(tài)力響應(yīng)調(diào)至最佳,然后保持PID參數(shù)不變,設(shè)計(jì)CMAC神經(jīng)網(wǎng)格,進(jìn)行CMAC-PID復(fù)合控制與PID控制下廣義空間各力加載通道靜態(tài)力、動(dòng)態(tài)力加載。
對(duì)多維力加載系統(tǒng)進(jìn)行階躍力加載仿真時(shí),同時(shí)給定Fx,F(xiàn)y,F(xiàn)z方向各800 N階躍力信號(hào)。通過(guò)仿真,得出CMAC-PID復(fù)合控制器與PID控制器作用下仿真曲線對(duì)比圖,如圖7所示。其中,圖7a為Fz響應(yīng)曲線對(duì)比圖。圖7b為Fy響應(yīng)曲線對(duì)比圖,圖7c為Fx響應(yīng)曲線對(duì)比圖,圖7d為Mx響應(yīng)曲線對(duì)比圖。
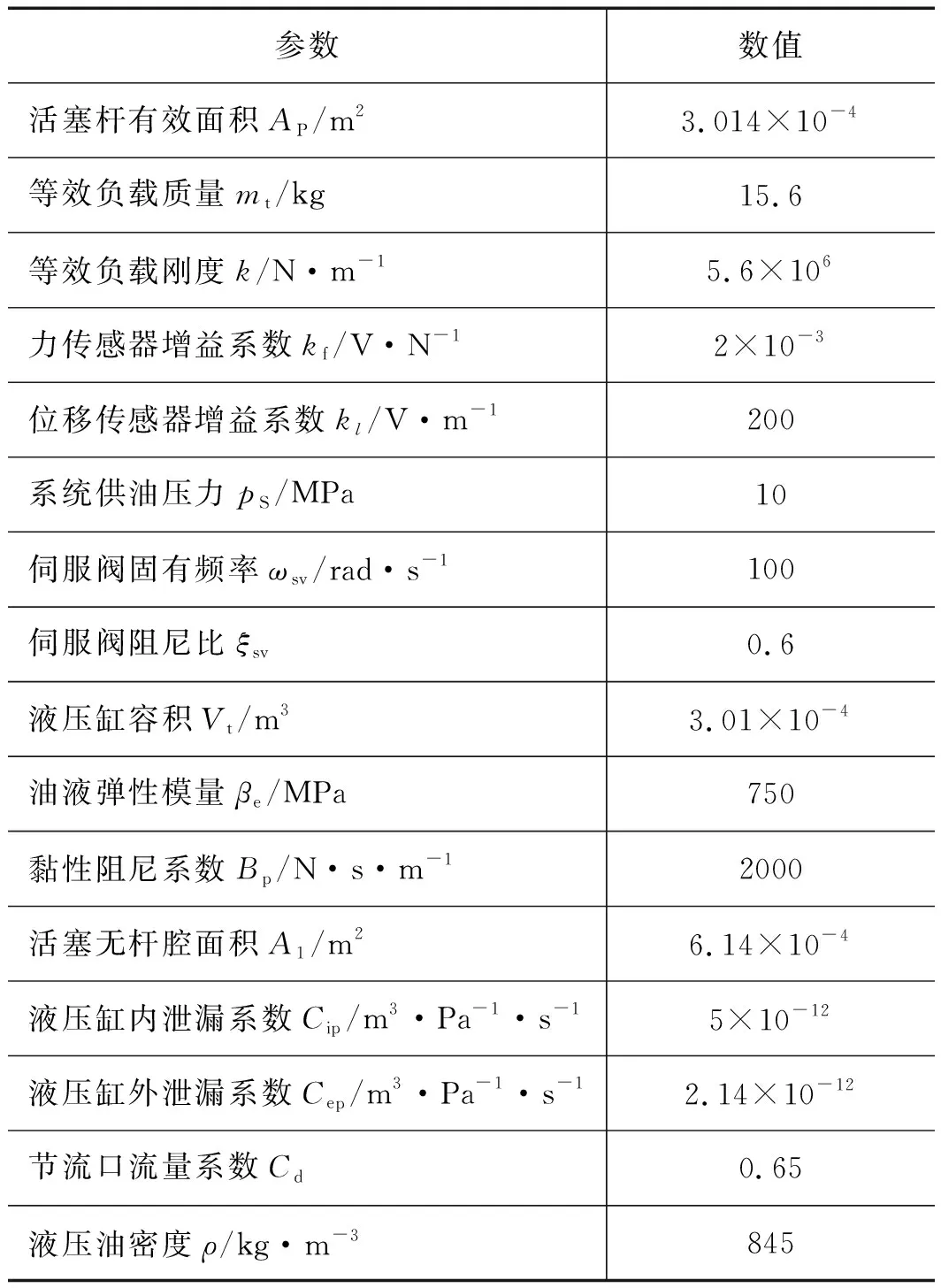
表1 多維力加載系統(tǒng)仿真參數(shù)
由圖7可知,與PID控制器相比,在CMAC-PID復(fù)合控制器作用下,F(xiàn)z,F(xiàn)y,F(xiàn)x響應(yīng)曲線超調(diào)量由分別降低了89%,95%,100%,響應(yīng)時(shí)間分別降低了50%,65.7%,15%,由強(qiáng)耦合產(chǎn)生的Mx降低了76.4%。
3.3 動(dòng)態(tài)力加載仿真對(duì)比分析
對(duì)多維力加載系統(tǒng)進(jìn)行正弦力加載仿真時(shí),同時(shí)給定Fx,F(xiàn)y,F(xiàn)z方向各500 N/Hz的正弦力信號(hào)。通過(guò)仿真,得出CMAC-PID復(fù)合控制器與PID控制器作用下仿真曲線對(duì)比圖,如圖8所示。其中,圖8a為Fz響應(yīng)曲線對(duì)比圖。圖8b為Fy響應(yīng)曲線對(duì)比圖,圖8c為Fx響應(yīng)曲線對(duì)比圖,圖8d為Mz響應(yīng)曲線對(duì)比圖。
由圖8可知,與PID控制器相比,在CMAC-PID復(fù)合控制器作用下,F(xiàn)z,F(xiàn)y,F(xiàn)x響應(yīng)曲線幅值衰減分別降低了70.8%,81.1%,86.3%,相位滯后分別降低了41.1%,29.5%,69.5%,由強(qiáng)耦合產(chǎn)生的Mz降低了78.6%。

圖7 階躍力加載仿真對(duì)比圖
4 實(shí)驗(yàn)分析
4.1 實(shí)驗(yàn)方案
多維力加載系統(tǒng)主體結(jié)構(gòu)實(shí)物圖如圖9所示。多維力加載系統(tǒng)數(shù)據(jù)采集及控制系統(tǒng)如圖10所示。
上位機(jī)通過(guò)MATLAB/Simulink進(jìn)行編程,編譯后傳送至下位機(jī)進(jìn)行實(shí)時(shí)控制,并且可以用于監(jiān)控系統(tǒng)的工作狀態(tài)、接受操作人員的控制指令,控制系統(tǒng)完成實(shí)驗(yàn)任務(wù)。下位機(jī)可以進(jìn)行實(shí)時(shí)閉環(huán)控制,并且可以將控制信號(hào)通過(guò)控制板卡輸出,其中板卡ACL6126發(fā)出-10~10 mA電流信號(hào)控制伺服閥,板卡PCI1716可以控制電磁換向閥,當(dāng)系統(tǒng)出力或關(guān)節(jié)液壓缸出力超過(guò)拉壓力傳感器量程時(shí)進(jìn)行卸荷,起到保護(hù)作用。PCI1716也可以采集拉壓力傳感器信號(hào),并將信號(hào)傳輸給下位機(jī),對(duì)液壓缸輸出力構(gòu)閉環(huán)控制,進(jìn)而實(shí)現(xiàn)液壓缸輸出力的精確控制。

圖8 正弦力加載仿真對(duì)比圖

圖9 多維力加載系統(tǒng)實(shí)物照片
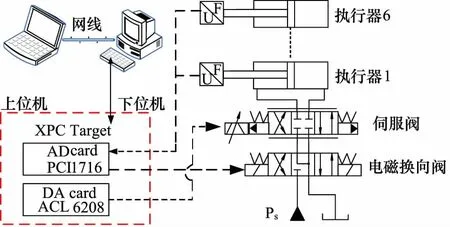
圖10 多維力加載系統(tǒng)數(shù)據(jù)采集及控制系統(tǒng)
4.2 靜態(tài)力加載實(shí)驗(yàn)對(duì)比分析
對(duì)多維力加載系統(tǒng)進(jìn)行階躍力加載實(shí)驗(yàn)時(shí),同時(shí)給定Fx,Fy,Fz方向各800 N階躍力信號(hào),其控制器參數(shù)調(diào)節(jié)參照仿真過(guò)程。通過(guò)實(shí)驗(yàn),得出CMAC-PID復(fù)合控制器與PID控制器作用下實(shí)驗(yàn)曲線對(duì)比圖,如圖11所示。其中,圖11a為Fz響應(yīng)曲線對(duì)比圖。圖11b為Fy響應(yīng)曲線對(duì)比圖,圖12c為Fx響應(yīng)曲線對(duì)比圖,圖11d為Mx響應(yīng)曲線對(duì)比圖。
由圖11可知,與PID控制器相比,在CMAC-PID復(fù)合控制器作用下,F(xiàn)z,Fy,Fx響應(yīng)曲線超調(diào)量分別下降了39.7%,0,78.6%,響應(yīng)時(shí)間分別下降了42.8%,72.3%,53.6%,穩(wěn)態(tài)誤差進(jìn)一步減小。由強(qiáng)耦合產(chǎn)生的Mx降低了72.2%,下降明顯。
4.3 動(dòng)態(tài)力加載實(shí)驗(yàn)對(duì)比分析
對(duì)多維力加載系統(tǒng)進(jìn)行正弦力加載實(shí)驗(yàn)時(shí),同時(shí)給定Fx,Fy,Fz方向各500 N/Hz的正弦力信號(hào)。由實(shí)驗(yàn)可得CMAC-PID復(fù)合控制器與PID控制器作用下響應(yīng)曲線對(duì)比圖,如圖12所示。其中,圖12a為Fz響應(yīng)曲線對(duì)比圖。圖12b為Fy響應(yīng)曲線對(duì)比圖,圖12c為Fx響應(yīng)曲線對(duì)比圖,圖12d為Mz響應(yīng)曲線對(duì)比圖。

圖11 階躍力加載實(shí)驗(yàn)對(duì)比圖
由圖12可知,與PID控制器相比,在CMAC-PID復(fù)合控制器作用下,F(xiàn)z,Fy,Fx響應(yīng)曲線幅值衰減上分別下降了86.5%,84.9%,86.1%,在相位滯后上分別降低了51.4%,47.1%,35.1%。由耦合力產(chǎn)生的Mz降低了66.6%,且較為穩(wěn)定。

圖12 正弦力加載實(shí)驗(yàn)對(duì)比圖
5 結(jié)論
(1) 為削弱多維力加載系統(tǒng)通道間強(qiáng)耦合力,同時(shí)提高力加載跟隨性,引入CMAC控制器,提出CMAC-PID復(fù)合控制策略;
(2) 通過(guò)多維力加載系統(tǒng)動(dòng)力學(xué)建模,驗(yàn)證了強(qiáng)耦合力的產(chǎn)生原因;
(3) 對(duì)多維力加載系統(tǒng)進(jìn)行仿真和實(shí)驗(yàn)研究,研究結(jié)果表明:采用靜態(tài)力加載時(shí),與PID控制器相比CMAC-PID復(fù)合控制器作用下穩(wěn)態(tài)誤差大幅度減小,系統(tǒng)響應(yīng)速度、控制精度明顯提高,強(qiáng)耦合現(xiàn)象明顯改善;采用動(dòng)態(tài)力加載時(shí),正弦力信號(hào)響應(yīng)曲線幅值衰減、相位滯后大幅度減小,由強(qiáng)耦合導(dǎo)致的力沖擊現(xiàn)象明顯改善。
本研究以液驅(qū)并聯(lián)多維力加載系統(tǒng)為載體,驗(yàn)證了CMAC-PID復(fù)合控制策略的有效性,為CMAC-PID復(fù)合控制策略在多維力加載環(huán)境模擬領(lǐng)域的實(shí)際應(yīng)用奠定基礎(chǔ)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32