液壓驅(qū)動冗余并聯(lián)加載機(jī)構(gòu)耦合特性分析和控制
2020-03-13 03:04:36
液壓與氣動 2020年3期
關(guān)鍵詞:模態(tài)
(航空工業(yè)慶安集團(tuán)有限公司, 陜西西安 710077)
引言
鉸點空間控制方法因結(jié)構(gòu)簡單、容易實現(xiàn)的優(yōu)點,被廣泛應(yīng)用于并聯(lián)機(jī)構(gòu)的運動控制[1-4]。然而并聯(lián)加載機(jī)構(gòu)常因其自身結(jié)構(gòu)布置和試件特性的影響,機(jī)構(gòu)各支鏈通道和各自由度間存在強(qiáng)動力學(xué)耦合,這種耦合作用隨著并聯(lián)機(jī)構(gòu)的位姿變化而發(fā)生變化,控制器增益的調(diào)節(jié)會嚴(yán)重受到系統(tǒng)低階模態(tài)的限制[5-6]。為降低耦合特性對系統(tǒng)控制性能的影響,動力學(xué)前饋控制、計算力矩控制和模態(tài)空間控制等基于動力學(xué)的控制方法[7-10]被提出,但由于動力學(xué)模型往往存在高度非線性和時變性,實際控制效果受到較大影響。基于運動學(xué)的交叉耦合控制方法[11]需要使用運動學(xué)正解,實時性要求高,且控制結(jié)構(gòu)復(fù)雜,需調(diào)整的控制增益較多,實際應(yīng)用較為困難。
本研究以9條液壓缸驅(qū)動的六自由度冗余并聯(lián)加載機(jī)構(gòu)為對象,通過對加載機(jī)構(gòu)耦合特性進(jìn)行分析,提出一種空間轉(zhuǎn)換控制方法,并仿真對比分析與采用傳統(tǒng)鉸點空間控制下系統(tǒng)的控制性能。此外,當(dāng)并聯(lián)機(jī)構(gòu)采用冗余驅(qū)動時,運動控制還應(yīng)考慮內(nèi)力耦合問題,內(nèi)力抑制方法[10,12]不作為本研究的研究范圍。
1 機(jī)構(gòu)描述
如圖1所示,加載機(jī)構(gòu)的下平臺通過9條對稱液壓缸與加載框架底部相連,連接鉸均為虎克鉸。將外側(cè)布置的6條液壓缸,定義編號為1~6,內(nèi)側(cè)布置3條液壓缸,定義編號為7~9,每條液壓缸配有內(nèi)置式LVDT位移傳感器,且在活塞桿軸向前端安裝有力傳感器。外側(cè)6條液壓缸的上、下鉸點分別位于半徑為ra和rb的圓周上。上鉸點之間和下鉸點之間的連線各構(gòu)成一個標(biāo)準(zhǔn)的六邊形結(jié)構(gòu)。2個六邊形的布置方向相差180°。內(nèi)側(cè)3條液壓缸呈120°均布,處于以z軸為軸心的圓錐面上,上、下鉸點各位于半徑為ru和rl的圓周上。加載試件上、下端分別固定在加載框架和上平臺上。
圖1b為加載機(jī)構(gòu)的俯視圖,定義體坐標(biāo)系Op-xpypzp固定在加載機(jī)構(gòu)上平臺上,慣性坐標(biāo)系Ob-xbybzb固定在基礎(chǔ)上。當(dāng)機(jī)構(gòu)位于初始中位時,兩個坐標(biāo)系重合在上平臺表面中心處。
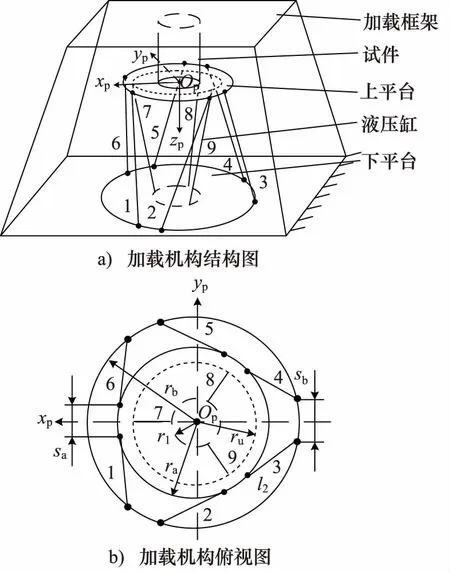
圖1 六自由度液壓驅(qū)動冗余并聯(lián)加載機(jī)構(gòu)結(jié)構(gòu)圖
2 耦合特性分析
將加載機(jī)構(gòu)中的液壓缸視為液壓彈簧,與加載試件彈性環(huán)節(jié)并聯(lián),可得如圖2所示的自由振動模型。通過研究加載機(jī)構(gòu)的模態(tài)特性以觀測加載機(jī)構(gòu)自由度間耦合情況。
考慮液壓缸缸筒、活塞桿等質(zhì)量影響,建立系統(tǒng)完整的動力學(xué)模型,簡化表示成下式:
式中,q為上平臺位姿向量,q=[x,y,z,φ,θ,ψ],其中x,y,z為3個平動自由度;φ,θ,ψ為繞x,y,z3個軸對應(yīng)的轉(zhuǎn)動自由度;M,C,Ks,G分別為慣性坐標(biāo)系下質(zhì)量矩陣、離心力及科氏力系數(shù)矩陣、加載試件剛度矩陣、重力項;f為9條液壓缸出力組成的力向量;J為機(jī)構(gòu)雅可比矩陣。
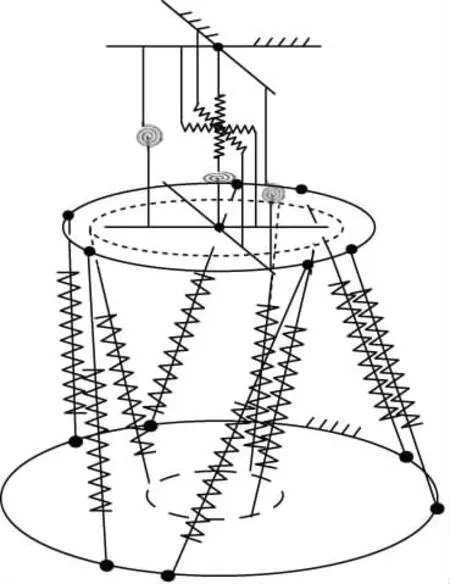
圖2 加載機(jī)構(gòu)自由振動模型
第i條液壓缸等效液壓彈簧剛度khi可寫為:
(2)
式中,βe為有效體積彈性模量;Ai,Vti分別為第i條液壓缸有效果面積和左右腔室的總體積。
則9條并聯(lián)液壓彈簧在廣義坐標(biāo)上等效剛度Kq可寫為:
Kq=JTKhJ
(3)
式中,Kh為液壓彈簧組成的對角矩陣,Kh=diag(k1,k2, …,k9)。
與試件剛度Ks并聯(lián)后總的剛度矩陣K為:
K=Kq+Ks
(4)
則加載機(jī)構(gòu)自由振動模型的振動微分方程可表示為:

(5)
因為方程式(5)中的質(zhì)量矩陣、剛度矩陣是關(guān)于平臺位姿的函數(shù),這里考慮平臺處于中位時的模態(tài)特性。
計算中位時加載機(jī)構(gòu)模態(tài)頻率ωm=[17.2, 17.2,41.09,42.53,42.53,32.93] Hz,模態(tài)矩陣U為:
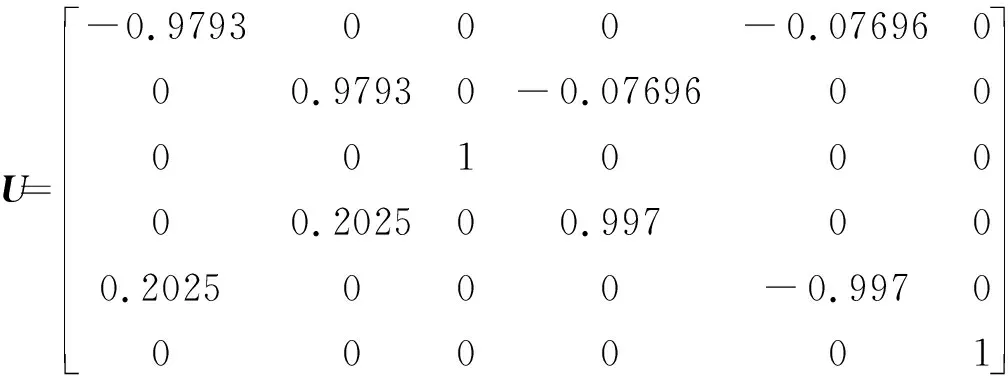
(6)
由此分析該加載機(jī)構(gòu)在中位時第一、二階模態(tài)頻率相等,主要映射在x和y平動方向,對應(yīng)系統(tǒng)的最低模態(tài)頻率;第三階模態(tài)映射在ψ方向;第四階模態(tài)映射在z平動方向;第五、六階模態(tài)頻率相等,主要映射在φ和θ方向。從模態(tài)矩陣U中可以看出,z和ψ自由度在中位時和其它自由度無耦合;由于試件的剛度耦合特性和加載機(jī)構(gòu)的非正交結(jié)構(gòu)布置,x和y自由度分別受到θ和φ自由度強(qiáng)動力耦合影響;對應(yīng)于φ,θ,z3個方向的模態(tài)頻率較高。加載機(jī)構(gòu)內(nèi)側(cè)布置的3個液壓缸增加了垂直平面內(nèi)3個自由度φ,θ,z的剛度,減小了其它自由度動力耦合干擾的影響。
3 控制方法
通過耦合特性分析,加載機(jī)構(gòu)各自由度間存在強(qiáng)動力學(xué)耦合。采用傳統(tǒng)的鉸點空間控制方法時,由于各支鏈單通道間耦合更為嚴(yán)重,調(diào)節(jié)任意一個通道的控制器參數(shù)增益均會同時影響到6個自由度通道的動態(tài)性能,故控制器所有通道增益的調(diào)節(jié)會嚴(yán)重受到系統(tǒng)最低階模態(tài)頻率的限制,控制性能因此會大大降低。
為降低強(qiáng)耦合特性影響,當(dāng)采用基于自由度的控制方法或基于運動學(xué)的交叉耦合控制方法時,為獲得良好運動控制精度,需要使用運動學(xué)正解實時解算平臺當(dāng)前位置和雅可比矩陣,增加了實施難度,因此本研究提出一種空間轉(zhuǎn)換的控制方法,如圖3所示。圖中的外部回路類似于鉸點空間控制方法,根據(jù)給定位姿q反解出各液壓缸所需的運動量l,再與各液壓缸運動反饋量lm進(jìn)行比較,形成各液壓缸獨立位移閉環(huán)控制。不同的是在內(nèi)部回路通過雅可比矩陣偽逆J+將液壓缸位移控制誤差el轉(zhuǎn)換成自由度控制誤差eq,從而轉(zhuǎn)換到自由度空間上進(jìn)行控制器設(shè)計,直接根據(jù)各自由度通道的動態(tài)特性進(jìn)行相應(yīng)的控制器參數(shù)調(diào)整,降低強(qiáng)耦合特性的影響,控制器通道數(shù)量也由傳統(tǒng)鉸點空間控制的9個減少為6個。最后由雅可比矩陣J將自由度控制量uq分配給各伺服閥控制量u去驅(qū)動液壓缸運動。雖然使用的雅克比矩陣J為給定位姿經(jīng)運動學(xué)反解解算的近似值,但由于最終閉環(huán)控制的為各液壓缸運動量,故對控制性能影響較小。
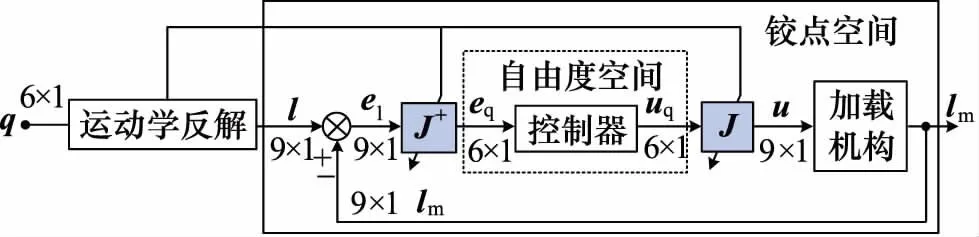
圖3 空間轉(zhuǎn)換控制方法
4 仿真分析
同時給定3個平動和3個轉(zhuǎn)動自由度階躍指令信號,幅值分別為2 mm和0.2°。為更加直觀地對比采用傳統(tǒng)的鉸點空間控制方法和空間轉(zhuǎn)換控制方法下位姿響應(yīng)性能,控制器均使用簡單的比例控制。鉸點空間控制參數(shù)調(diào)整時,受最低階模態(tài)性能的限制,在保證系統(tǒng)響應(yīng)穩(wěn)定情況下,最終調(diào)節(jié)鉸點空間控制器增益矩陣Kpj=diag(3,3,3,3,3,3,3,3,3)。空間轉(zhuǎn)換控制參數(shù)調(diào)整時,可將對應(yīng)于最低階模態(tài)且受到來自φ,θ自由度動力耦合的方向x,y對應(yīng)的自由度控制器增益調(diào)至較小值,從而保證系統(tǒng)足夠的穩(wěn)定裕度,將對應(yīng)于高階模態(tài)的自由度方向φ,θ,z控制器增益調(diào)至較大值,以獲得較高的位姿響應(yīng)性能,最終調(diào)節(jié)空間轉(zhuǎn)換控制器增益矩陣Kpd=diag(3,3,8,6,6,6)。
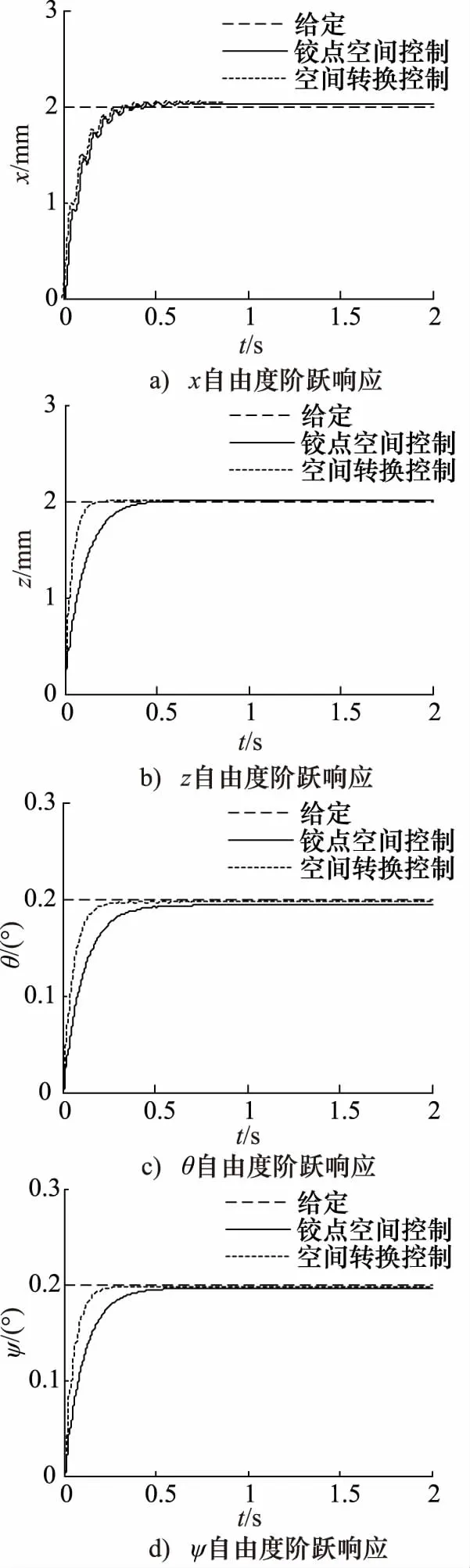
圖4 兩種控制方法下各自由度階躍響應(yīng)情況
x,z,θ,ψ4個自由度階躍響應(yīng)仿真結(jié)果如圖4所示,可以看出受到最低階模態(tài)頻率的限制,兩種控制方法下在x方向階躍響應(yīng)情況相似,其中x方向產(chǎn)生正的穩(wěn)態(tài)誤差主要是受到θ方向干擾力的影響,液壓系統(tǒng)低阻尼特性造成上升過程中出現(xiàn)抖動現(xiàn)象。而空間轉(zhuǎn)換方法在z,θ,ψ3個自由度的響應(yīng)速度更快,穩(wěn)態(tài)精度更高,這主要是由于空間轉(zhuǎn)換控制方法可以根據(jù)各自由度通道的動態(tài)特性,在轉(zhuǎn)換的自由度空間上對各自由度控制通道增益進(jìn)行單獨調(diào)節(jié),有效降低耦合的影響,提高位姿響應(yīng)性能。
5 結(jié)論
本研究分析了由9條液壓缸驅(qū)動的六自由度冗余并聯(lián)加載機(jī)構(gòu)的耦合特性,并提出了一種空間轉(zhuǎn)換空間控制方法,將鉸點空間控制誤差量轉(zhuǎn)換到自由度空間后,直接根據(jù)各自由度通道的動態(tài)特性進(jìn)行相應(yīng)的控制器參數(shù)調(diào)整。
仿真結(jié)果顯示,比起傳統(tǒng)的鉸點空間控制,提出的方法有效降低了機(jī)構(gòu)強(qiáng)耦合特性對鉸點空間下控制器增益參數(shù)整定的影響,提高了位姿響應(yīng)性能。同時避免了使用運動學(xué)正解對系統(tǒng)高實時性要求,且減少了控制器需調(diào)整增益數(shù)目,具有較好的工程應(yīng)用價值。
猜你喜歡
成都信息工程大學(xué)學(xué)報(2022年4期)2022-11-18 07:31:14
中國傳媒大學(xué)學(xué)報(自然科學(xué)版)(2021年1期)2021-06-09 08:43:12
工程與建設(shè)(2019年1期)2019-09-03 01:12:12
廣州大學(xué)學(xué)報(自然科學(xué)版)(2016年2期)2017-01-15 13:43:00
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學(xué)報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36